Ertesi Cuma gecesi, yazar ilginç bir şey toplamak istedi. Bunu hatırlayarak, robot çizme projelerini gördü ve sürekli rotasyon servo sahibi olduğu için böyle bir robotun monte edilmesine karar verildi. Sıradan bir rotasyon servo yapılabilir.
malzemeler:
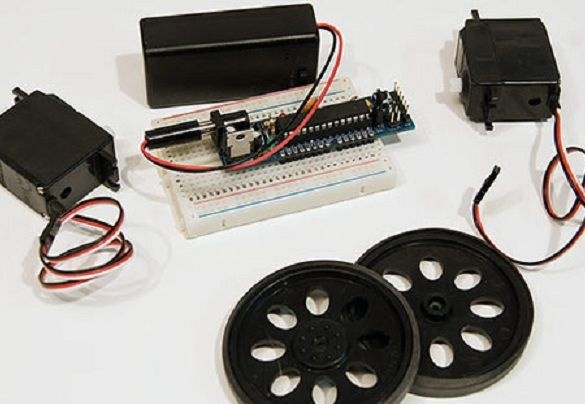
- DC Boarduino (bu bir klon Arduino)
- 2 adet sürekli dönüşlü servo
- Servo tekerlekler 2 adet
- breadboard
- 2.1 mm fiş ve anahtarlı 9V pil konektörü
- bağlantı telleri
Bu projede Boarduino kullanmak gerekli değildir, herhangi bir Arduino kartı yeterlidir. Yazar, boyutu nedeniyle bu tahtayı seçti. Ayrıca belirli sayıda işaretleyiciye ihtiyacınız olacak, bu robot için bir dizi farklı renk satın alabilirsiniz.
Buna ek olarak, çizim robotunun gövdesi için bir 9V bataryaya ve tabana ihtiyacınız vardır.
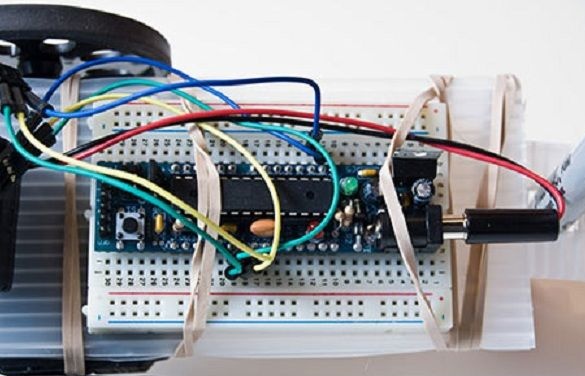
Robotun montajında karmaşık bir şey yok. Her şeyden önce, yazar tekerlekleri yapışkan bantlı iki servo ile sabitler ve tekerlekler arasındaki mesafeyi ölçtü. Tabanın genişliğinin tekerlekler arasındaki mesafeden biraz daha az olması gerekir. Yazar oldukça hafif ve dayanıklı olduğu için oluklu plastik kullanıyor ve onunla çalışmak zor değil. Kullanımı elbette gerekli değildir, diskler için kutulardan karton veya plastik bile kullanabilirsiniz.
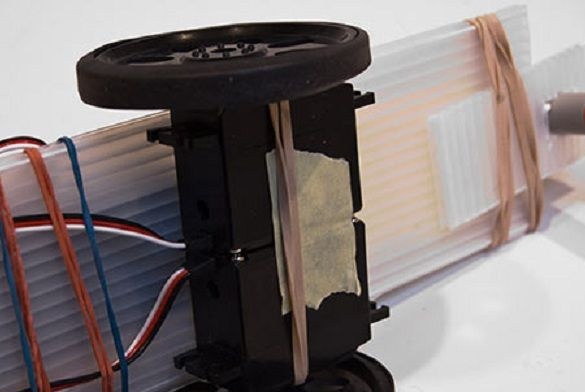
Servo sürücüler tabana lastik bantlarla bağlandı. Bataryayı ve breadboard'u yerleştirirken, bir denge sağlamak gerektiğinden zorluklar ortaya çıktı. Yazar, işaretçinin yerleştirildiği tarafta daha fazla yer açmak istedi, ancak karşı tarafta bir avantaj elde etmek istemedi. Lastik bantların yardımıyla, en uygun olanı belirleyerek bileşenlerin yerini ayarlamak oldukça basittir.
Proje boyunca, breadboard'a bağlanmak için BLS pinli teller kullanılır, servo sürücüler de bunlara bağlanır.
Yazar, robotun montajı ile ilgili tüm işleri bitirdiğinde, hemen performansını kontrol etmek istedi. Kodu aramak biraz zaman aldı. Arduino kullanarak Parallax sürekli rotasyon servo kontrolüne ilişkin bir makaleye tökezledi, doğru yolda olduğunu fark etti. Kod mümkün olduğunca basitleştirildi, şu anda Drawbot sadece daireler çizebiliyor.Tabii ki, bu ilkel, ama aynı zamanda harika bir başlangıç ve geliştirme ve modernizasyon için temel. Kod makalenin altından indirilebilir.
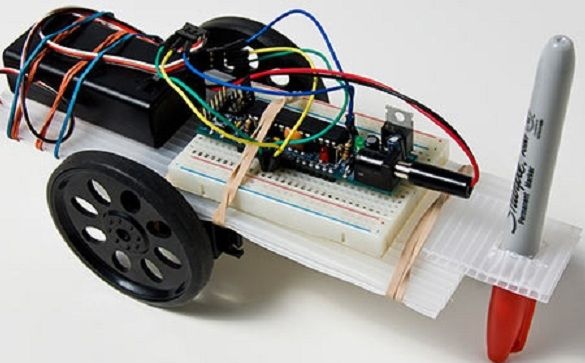
Şimdi yazar bir daire içinde dolaşan bir robot aldı. Çalışmaya devam eden yazar, oluklu plastik kalıntılarını aldı ve bıçak yardımıyla bir delik açtı. Delik, gerekenden biraz daha küçük bir çapla kesildi, içindeki işaretçi azaltılmış delik sayesinde mükemmel bir şekilde takıldı. Karton kullanırsanız, bu etki olmaz ve işaretleyici iyi tutmaz veya düşmez.

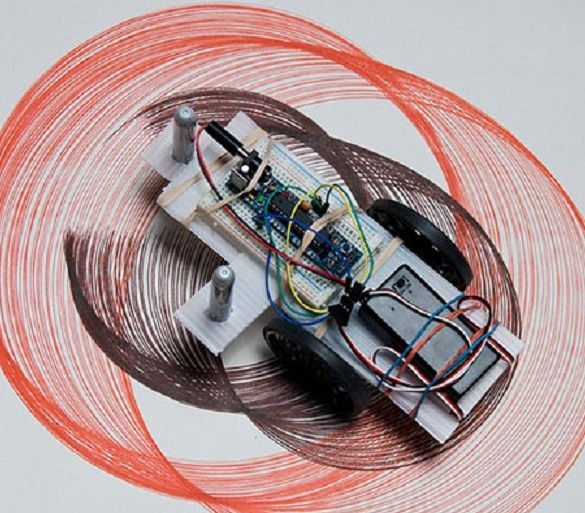
İşaretçiyi taktıktan sonra robotu test etme zamanı. 24x18 sayfasının ortasına yerleştirip açarak yazar sonunda Drawbot'u çalışırken gördü. Daire çizmeye başladı. Yazarın bir tür sanat eseri yaratan bir robot yaratmayı başardığını söyleyebiliriz.
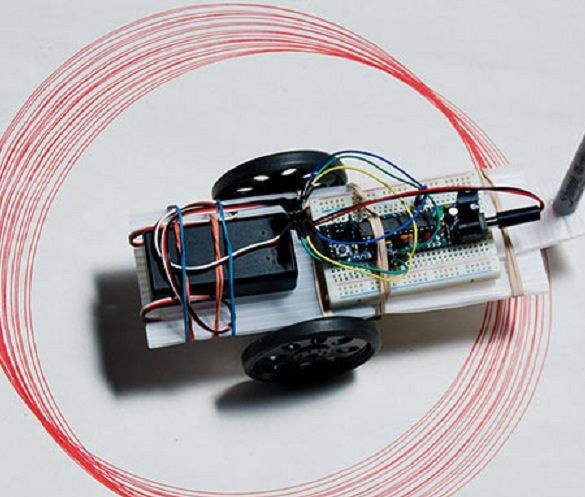
Resim yerde yatan levha nedeniyle biraz garip geldi ve oldukça eşit değildi ve büyük olasılıkla servolar senkron olarak dönmedi. Bir çemberin daha düşük, ikincisinin daha yüksek ve diğerinin hala biraz daha yüksek veya daha düşük olabileceği ortaya çıktı. Muhtemelen, ideal bir konumda, tüm daireler tek bir çizgide hizalanır. Görünüşte daha güzel görünecekti.
Yazar, ikinci işaretçinin durumu aydınlatabileceğini düşündü ve robot daha ilginç resimler yapacak. Sonuç iyiydi, daireler birbirleriyle kesişmeye başladı. Drawbot'un büyük bir kağıda nasıl davrandığını görmek daha ilginç olacaktır.
Robotu bir kağıt yüzeyine serbest bırakarak, yazar bir daire veya bir grup daire elde edebilir. Ancak hazır bir robota sahipseniz, kodu değiştirerek onu geliştirmeyi düşünebilirsiniz.