

Ve şimdi güneşten uzaklaşıyor. Çok basit bir şekilde çalışır: sabit bir tahtada, önde bir ve iki yan olmak üzere üç fotodirenç vardır. Yan fotodirençler yanıyor, ancak ön yanmıyorsa, cihaz ayçiçeği düzenini ileri doğru döndürür. Herhangi bir dengesizlik ile - uygun yönde döner. Bu tasarım, elektronik ve mizah, Instructables tarafından shivtej1505 takma adı ile icat edildi.
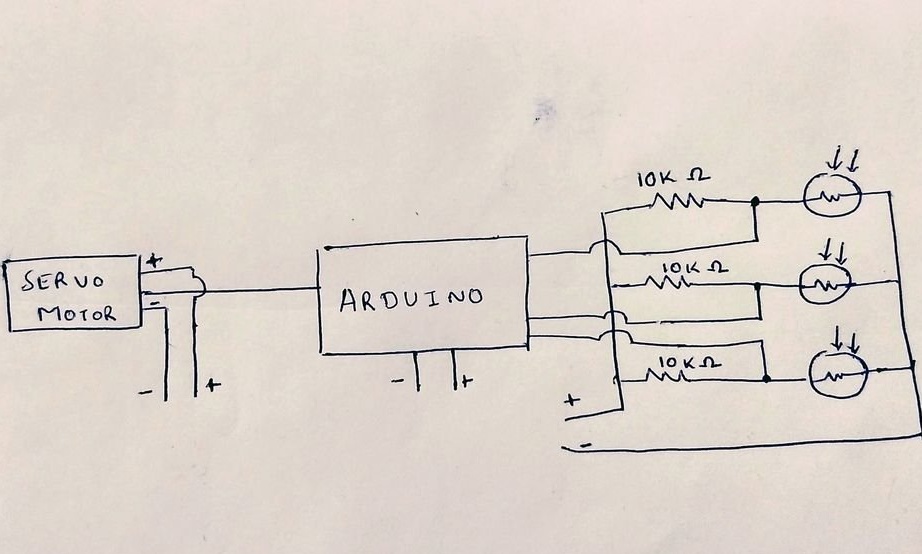
Fotodirençler 10 kilo-ohm dirençler tarafından çekilir. Böylece, fotodirenç ne kadar parlak olursa, ortak kabloya göre pozitif voltaj o kadar az olur. Uygunsuz, ancak yazılım Arduino üç analog sinyalin tümünü, gerekli olmayan işlemsel amplifikatörlerden daha kötü olmayan şekilde ters çevirir. Aynı yazılım, standart servo.h kütüphanesini kullanarak servo motoru kontrol etmek için bir sinyal üretir.
İki modelde, biri perfboard tipi, diğeri breadboard, ancak şimdiye kadar Arduino olmadan, hepsi şöyle görünür:
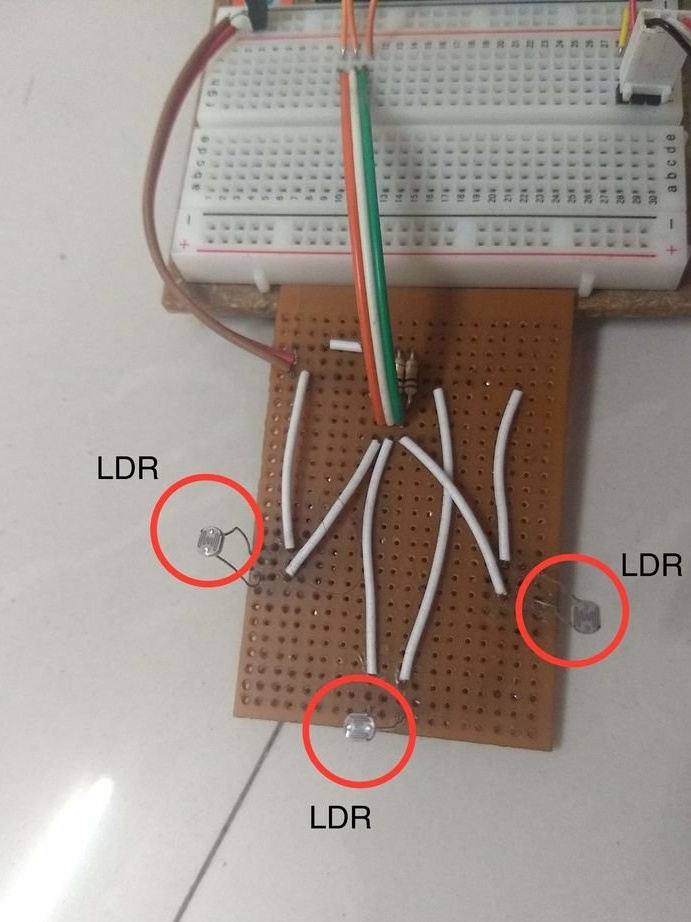
Fotodirençlerin ve servo motorun bağlı olduğu kartın sonuçları eskiz. İçinde hiçbir şey değiştirmezseniz, fotodirençlerden gelen sinyallerin analog girişlere beslenmesi gerekir: soldan A0'a, ortadan A1'e, sağdan A2'ye ve servo motorun sinyalini çıkış 13'ten çıkarın.
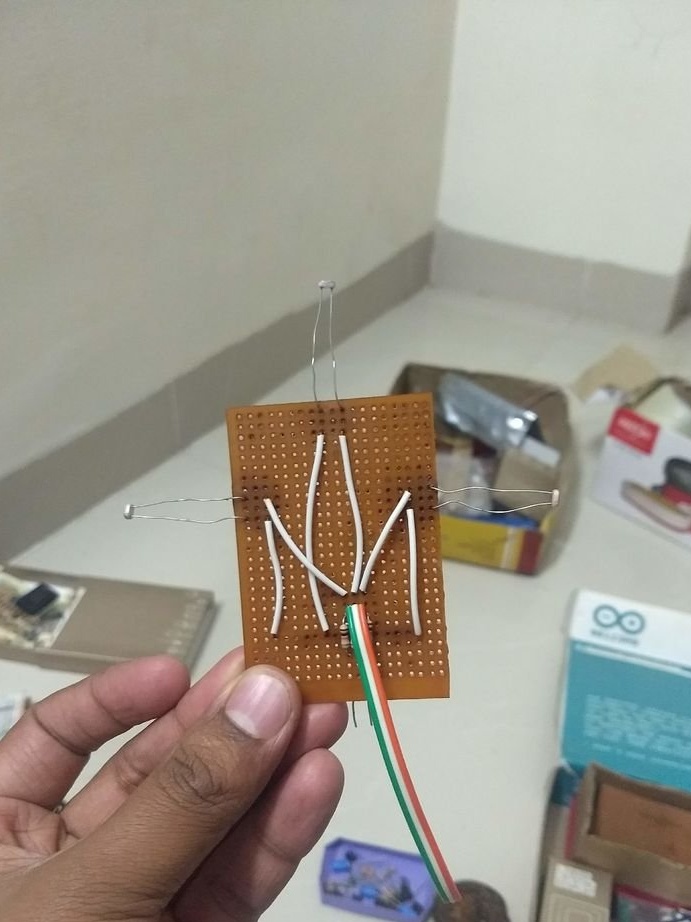
Master fotodirençleri protboard tipi perfboard'a lehimler:
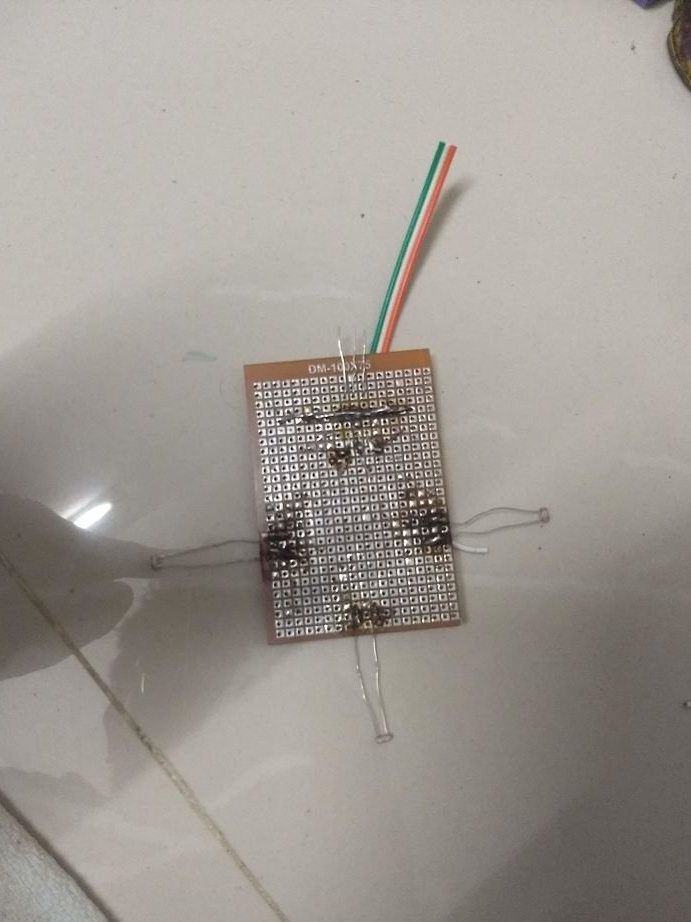
Onları bir lehim atlama teline bağlar:
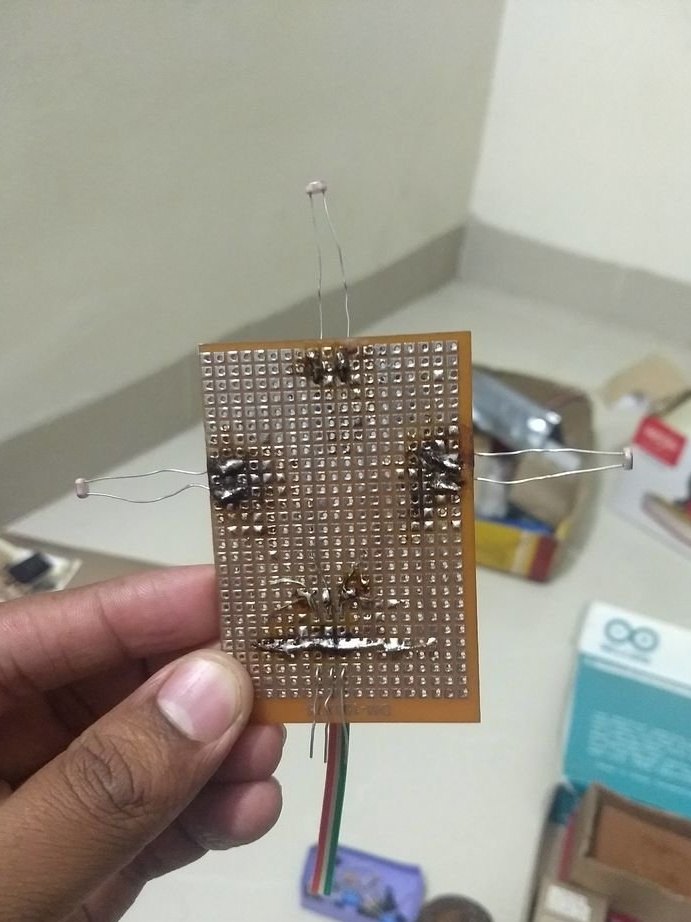
Ve teller:
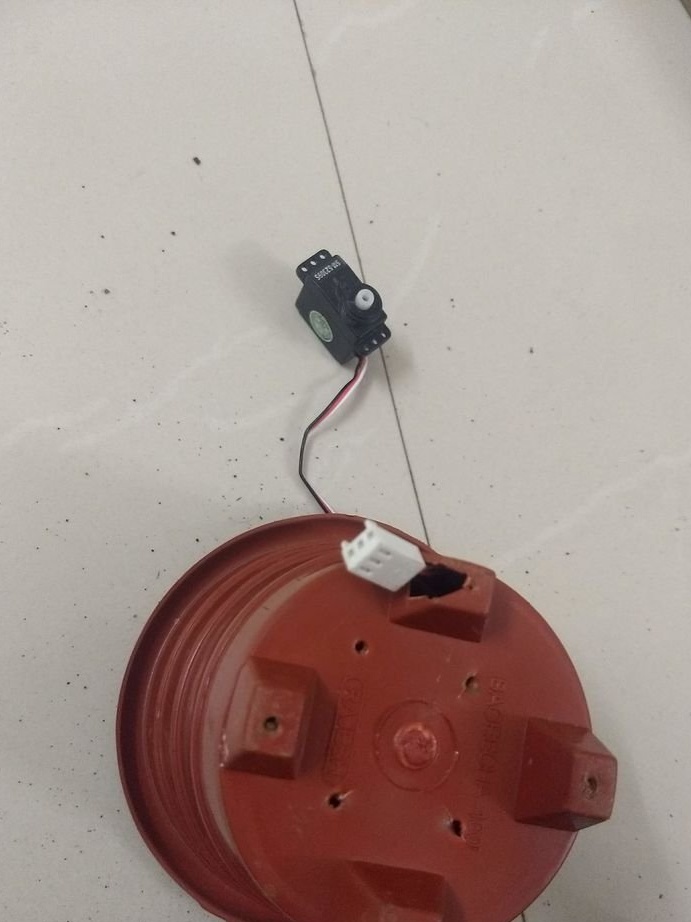
Servo motorun kablolarını bir konektörle çıkarmak için potadaki deliği uzatır:

Bu konektörü çıkarır:
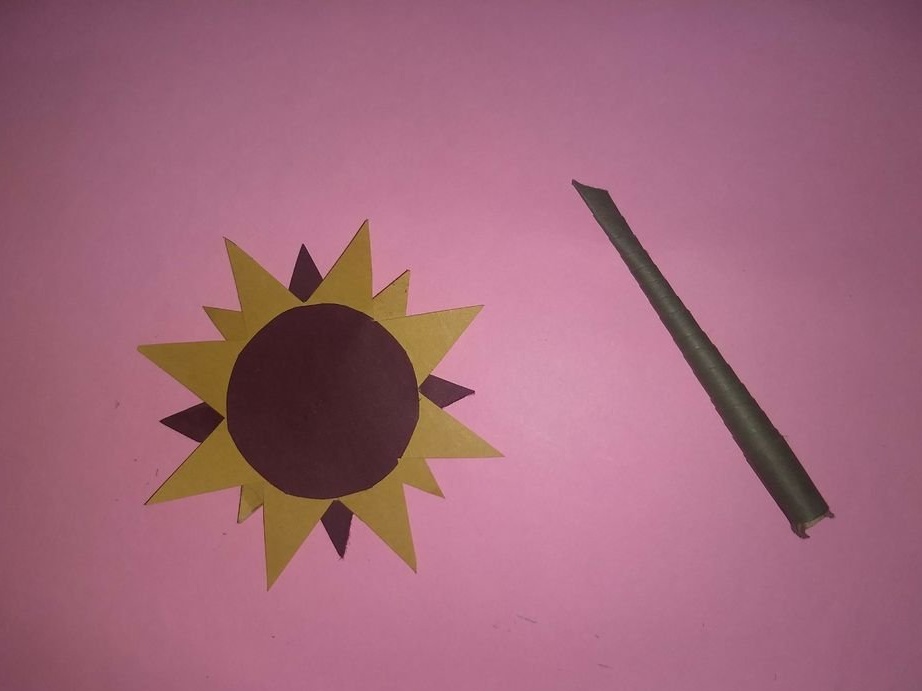
Ayçiçeği düzeni yapar:

Perfboard tipi bir board, breadboard tipi bir panoya ve içinden Arduino'ya bağlanır (yukarıdaki taslağa bağlantı). Kuru toprak, içine mil üzerinde ayçiçeği maketi bulunan bir servo motorun yerleştirildiği tencereye dökülür. Asıl mesele, ayçiçekini yanlışlıkla gerçek için almamak ve sulamaktır. Genel olarak, aşırı gerçekçilik için çabalamayın. Robotik ayçiçekleri de "uğursuz vadinin" etkisine neden olabilir. Şimdi nasıl çalıştığını görelim:
Japon yazar Akira Nakaushi'nin Himawari tarafından benzer bir cihazla karşılaştırıldığında, önerilen tasarım çok basitleştirildi. Bir dizi LED, birkaç kamera yok, işlem gücü önemli ölçüde azaldı.