


İyi günler, bugün tank yapımıyla ilgili talimatları paylaşmak istiyorum. Dahili kontrolör için iki seçenek olacaktır: ESP -8266 ve Arduino Pro Mini. İlk versiyonda, kontrol Wi-Fi iletişimleri yoluyla gerçekleştirilir. İkinci IR uzaktan kumandasında. TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35) temel alınarak yapılmış olup, Tamiya 70097 Çift Motorlu Şanzıman Kiti ve şanzımanla birlikte gelen motorlar tarafından tahrik edilmektedir.
İhtiyacımız olacak:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- model yapıştırıcısı (örneğin TAMIYA Çimento)
- Tamiya 70097 Çift Motorlu Şanzıman Kiti
- ESP 8266-12E veya Arduino Pro Mini 8MHz 3.3V
- voltaj sabitleyici AMS 1117 3.3v 8000mA (ESP 8266-12E ile isteğe bağlıysa)
- Qifei L9110 motor sürücüsü
- kapasitör 10v 1000uF
- iki renkli (kırmızı, yeşil) LED
- mavi LED
- 2 kırmızı LED
- IR alıcısı
- fotodirenç
- 2 AAA pil veya 4 AAA 1.2V 1000mA NI-MN pil için 2 bölme
- 2 direnç 2ohm
- 4 direnç 75 ohm
- 6 direnç 10 kOhm (ESP 8266-12E ile isteğe bağlıysa)
- düğmesi
- fotodirenç
- USB - TTL
- havya
- çok renkli teller
Adım 1 Konut ve mekanik.
İlk önce toplamanız gerekiyor model TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Şanzıman şaftlarının çıkış deliklerini kaplayan parçalar haricinde, alt parçayı talimatlara göre yapıştırıyoruz. Önde gelen yıldızlar da yapışmaz. Üst kısmı talimatlara göre değişiklik yapmadan yapıştırın. Bütün bunları yapıştırdıktan sonra, kurumaya bırakın ve dişli kutusunun toplanmasına devam edin. Talimatlardan görülebileceği gibi Tamiya 70097 iki farklı versiyonda monte edilebilir.
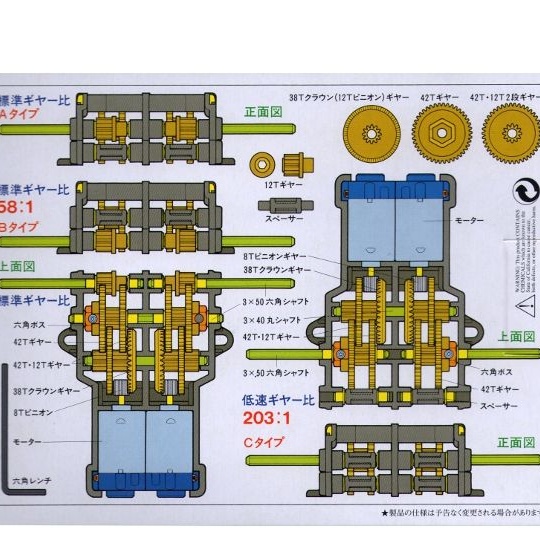
58: 1 dişli oranına sahip ilk seçenek, ikinci - 203: 1. İlk seçeneğe ihtiyacımız var. Ve burada da o kadar basit değil. Bu durumda, eksen çıkışı şanzımanın altına veya ortasına yakın olabilir. Eksenlerin ekshalasyonu orta delikte yapılmalıdır! Vites kutusunu monte ettikten sonra, modele takmaya devam ediyoruz. Teoride, her şey basit olmalı, çünkü bir firmanın hem modeli hem de şanzımanı. Uygulamada - şanzımanın oraya itilmesi gerekiyordu. Vites kutusunun yatay konumunda, tahrik tekerleklerinin milleri yukarı doğru şişti, bu yüzden vites kutusunu istenen konuma sabitlemeyi mümkün kılan metal bir plaka kesmeliydik.

Şanzıman akslarının 3 mm kesilmesi gerekecektir. Ardından tahrik tekerleklerini üzerlerine yapıştırın.

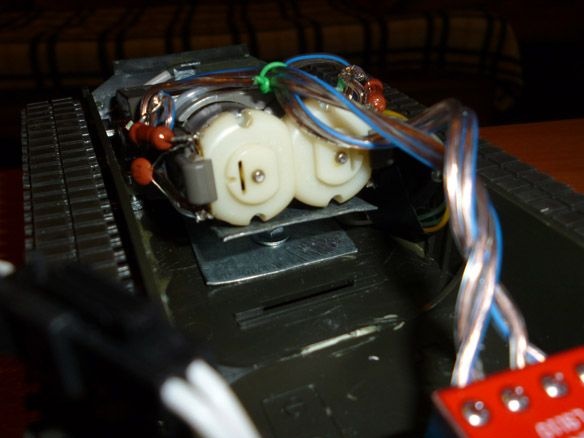
Arkaya yakın üst kısımda, iki renkli bir LED ve bir IR alıcı için delikler açıyoruz.

Öne yaklaştıkça, el feneri görevi görecek mavi bir LED için bir delik vardır.

Ve kapağın içinde - bir fotodirenç için.

Arka tarafta, kırmızı LED'leri aydınlatma için yapıştırın.

Yukarıdakilerin tümüne, telleri lehimlemeniz gerekir. Kurulumdan önce bunu yapmak daha uygundur.
Adım 2 Elektrikçi
Burada daha fazla montaj için bir seçenek sunacağım.
ESP 8266'yı seçtiyseniz. Dahili Wi-Fi modülü, kontrol ve bağlantı işlemini büyük ölçüde kolaylaştırır.Arduino IDE'de kolayca programlanabilir. 4 Mb belleğe sahip bir modül seçmek en iyisidir. Bu durumda, ESP-8266'yı başlatmak ve yanıp sönmek için minimum kablo demetini toplamak gerekir. Sadece VCC pimi doğrudan güç kaynağına bağlanır, kalan pimler: CH_PD, RESET, GPIO0, GPIO2, direnç yoluyla güç kaynağına (VCC) çekilmelidir. 10kOm dirençler GPIO15 hariç 4.7kOm'dan 50kOm'a kadar başkalarıyla değiştirilebilir - değeri 10k'a kadar olmalıdır. Doğrudan, güç kaynağının eksi (GND) 'sine, sadece GND'yi bağlarız ve ayrıca modülü firmware indirme moduna, GND'ye koymak için GPIOO'yu direnç yoluyla 10kOm'a çekeriz. Modülün yeniden başlatılması ve yanıp sönmesi için düğme gereklidir. USB-TTL konektörü - bellenim için.
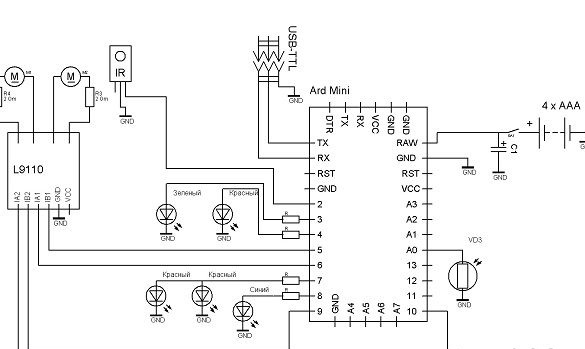
İşte bir diyagram
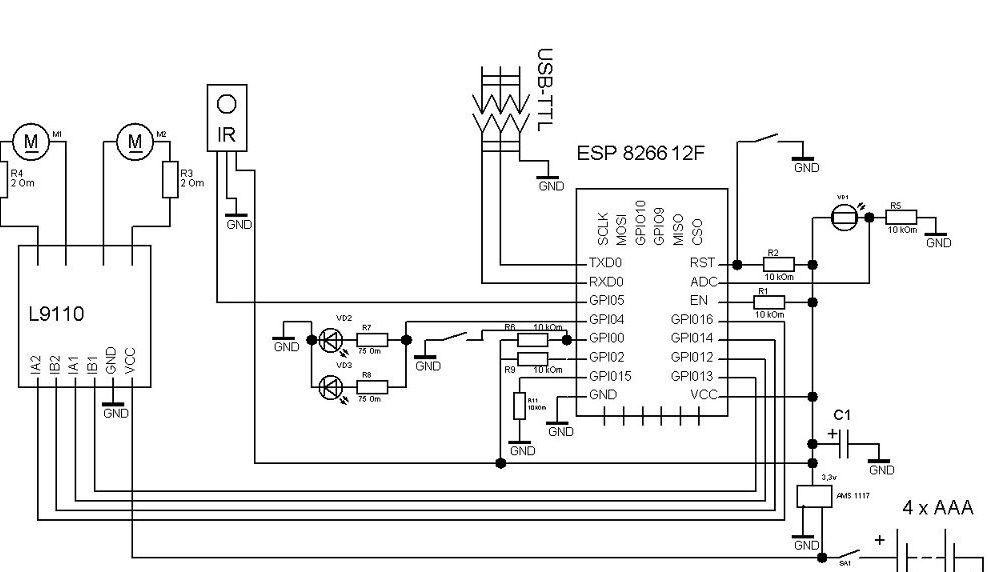
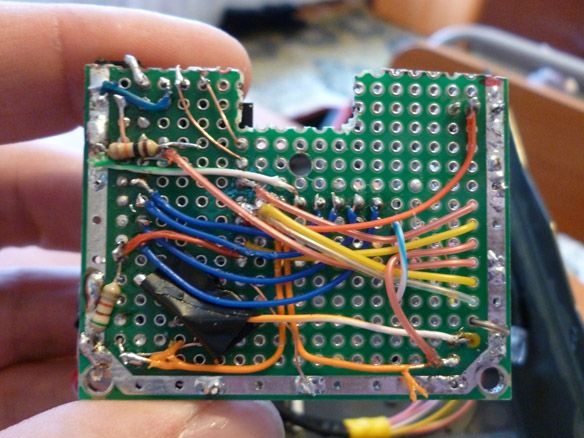
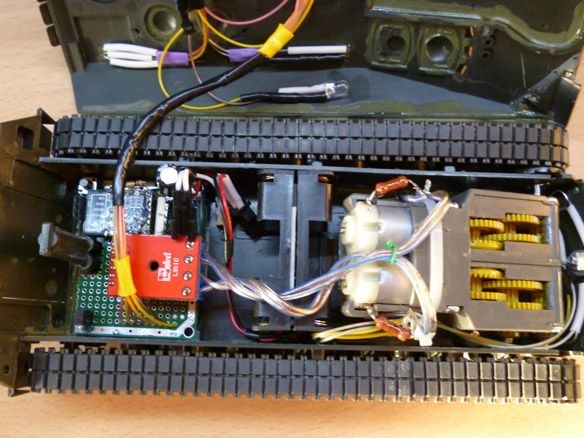
Biraz açıklayacağım, arka plan aydınlatması için mavi ve iki kırmızı LED gereklidir (karanlıkta görünür ve güzeldir), fotodirenç kontrolörün ADC'sine bağlıdır ve aydınlatmayı belirlemek için gereklidir (arka ışık kararınca). 10 kOhm çekme dirençleri, LED'ler için 75 Ohm, motorlar için 2 Ohm akım sınırlayıcı (onlarsız, hareket etmeye çalışırken, kontrolör aşırı yüklü). Her şeyi devre kartındaki devreye göre lehimliyoruz. Güç kaynağı için seri olarak lehimlenmiş 4 "küçük" pil veya dört AAA boyutunda pil kullanabilirsiniz. İki pilin iki bölmesini çift taraflı bantla yapıştırır ve seri olarak bağlarız. Hem akü bölmeleri hem de akümülatörler, şanzıman ile devre kartı arasına yerleştirilir.

Eğer seçiminiz Arduino'ya düşerse. Sadece Arduino Pro MINI içeri sığar. Motorlar 3 volt için tasarlandığından ve motorlara ve Arduino'ya ayrı ayrı güç vermek istemediğiniz için 3,3 voltluk bir pano seçmeye değer. Arduino daha kolaydır. Tüm kontrolör kablo demeti ve voltaj regülatörü zaten kartın kendisinde. Devre kartındaki Arduino soketini ve motor sürücüsünü lehimlemek için kalır.

Adım 3 Programlama ortamının hazırlanması.
Ürün yazılımını düzenlemek ve çizimi ESP'de doldurmak için Arduino IDE'yi Arduino.cc'nin resmi sitesinden yüklemeniz ve ESP için eklentiyi Boards Manager üzerinden yüklemeniz gerekir. Bunu yapmak için Arduino IDE'yi başlatın, ardından Dosya - Ayarlar - Ek Anakart Yöneticisi URL'leri alanına bağlantıyı ekleyin
http://arduino.esp8266.com/package_esp8266com_index.jsonTamam'ı tıklayın (bu alana virgülle ayrılmış birkaç bağlantı girebilirsiniz). Sonraki Araçlar - Yönetim Kurulu - Yönetim Kurulu Yöneticisi, filtre alanına esp8266 yazın ve ESP8266 Community Forum tarafından ESP8266'ya tıklayın. Yükle'yi tıklayın ve indirme işleminin bitmesini bekleyin. Artık Araçlar menüsünde Board - Generic ESP8266'yı seçmek ve modülünüzün frekansını 80 veya 160Mhz, flash bellek boyutuna ayarlamak ve USB-TTL adaptörünün bağlı olduğu seri portu seçmek kalır.
Arduino için, resmi Arduino.cc web sitesinden Arduino IDE'sini kurmanız yeterlidir.
Adım 4 Bellenim
Eskizi düzenlemek ve ESP ile doldurmak kalır.
"String _ssid =" ";" alanında tırnak işaretleri arasında hangi erişim noktasına bağlanmak istediğinizi gösterir.
"String _password =" ";" bu ağın şifresidir.
"String _ssidAP =" Mardella ";" mevcut ağa bağlanmazsa ESP'nin yükseleceği ağın adı.
"String _passwordAP =" 12345678 ";" - ESP'nin mevcut ağa bağlanmazsa yükseleceği ağın şifresi.
"String SSDP_Name =" Mardella ";" SSDP adı
Başladıktan sonra ESP, çizimde belirtilen erişim noktasına bağlanmaya çalışır, başarılı olursa robotumuzun IP adresini belirlemeniz ve bu adrese bir tarayıcı aracılığıyla bağlanmanız gerekir. Ayrıca bir bilgisayardan ağ altyapısına geçebilir, orada tankımızı bulabilir ve bağlanmak için çift tıklayabilirsiniz. Bağlantı başarısız olursa, ESP erişim noktası olur. Daha sonra yeni bir erişim noktasına bağlanarak ve tarayıcıya 192.168.1.1 girilerek erişim elde edilebilir.
Web arayüzü iki sayfadan oluşur. İlk kontrol eden. İkincisi özelleştirme içindir. İkinci sayfada, bağlanmak istediğiniz erişim noktasını, tankın adını ve ESP'nin yükselttiği erişim noktasının adını ve şifresini belirtebilirsiniz. Tüm değişiklikler bir yeniden başlatmanın ardından yürürlüğe girer. Modülü web arayüzü üzerinden de yeniden başlatabilirsiniz.
Arduino için tüm “results.value” alanlarını düzenlemeniz gerekir. Orada kullanacağınız konsolun IR kodlarını yazdıktan sonra.

Video tanchika: