


İyi günler, 1/35 ölçekli Tamiya 35163 JGSDF TİP 61 TANK'da yapıştırma için modelin elektrifikasyonu ile ilgili talimatları paylaşmak istiyorum. Hareket için Tamiya 70097 çift dişli kutusunu ve kontrolör olarak ESP 8266-12E'yi kullanacağız. Bir web kabuğu kullanarak Wi-Fi kontrolü.
İhtiyacımız olacak:
- Tamiya 35163 JGSDF TİP 61 TANK (1:35)
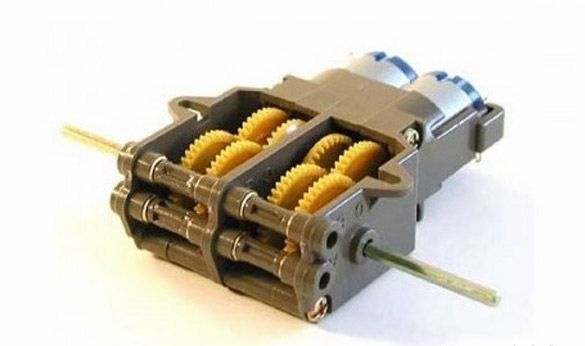
- Tamiya 70097 Çift Motorlu Şanzıman Takımı Redutcor Motor
- TAMIYA Çimento model tutkalı
- ESP 8266-12E veya ESP 8266 -12F
- AMS 1117 3.3v 800mA - voltaj sabitleyici
- Qifei L9110 motor sürücüsü
- Kondansatör 10v 1000uF
- İki AAA pil için açık bölme
- 4 AAA pil veya 4 AAA 1.2V 1000mA NI-MN pil
- 2 ohm direnç 2 adet.
- Direnç 10 kOhm 6 adet.
- Düğme
- anahtar
- USB - TTL
- devre kartı
- havya
- çok renkli teller
Adım 1 Konut ve mekanik.
Her şeyden önce, bizim model Tamiya 35163. Kutuyu açın:
Model detaylarını ekstrüde ederek başlayın. Çıkıntılı parçalar veya çerçevenin kalıntıları bir bıçakla kesilmeli veya zımpara kağıdı ile temizlenmelidir. Vücudun alt kısmını talimatlara göre monte ediyoruz, sadece tahrik tekerleklerini takmak için parçaları yapıştırmamalısınız. Fotoğraf çekmek için şu ayrıntıları uyguladım:

Ters tarafta şöyle görünür:

Tekerlek yuvalarını tutkalla yapıştırmamaya dikkat edin, tüm tekerlekler serbestçe dönmelidir. Kavşaktaki tırtıllar da birbirine yapıştırılmalıdır. Şasiyi monte ettikten sonra, başka işlemlerden önce iyice kurumasına izin vermek daha iyidir:

Şasi kururken, üst kısmı yapıştırın. İlk olarak, temel. Birçok küçük parça var, bu tür parçaları yapıştırmak için cımbız kullanmak daha iyidir. Yapıştırılmış taban:

Kuleyi topluyoruz. Kule için iki seçenek mevcuttur. Fark, namluyu kuleye monte etme detaylarında yatmaktadır. İlk seçenek standart bir montaj, ikincisi toz korumalı. Hangisini en çok sevdiğinizi seçmeye değer. Bu fark sadece görünüşe yansır. Modeli Yılbaşı tatillerinde yapıştırdı, bu yüzden tankı da giydirdi:

Bir araya getirin ve kurumaya bırakın:

Model kururken, dişli motorunu monte etmeye devam edelim. Bir dişli motor ve modelle aynı şirket tarafından üretilen Tamiya 70097 motorlarını kullanacağız:
Kitle birlikte gelen talimatın Rus dili yok, ancak zaten anlaşılabilir.Burada iki montaj seçeneği ayrıntılı olarak açıklanmaktadır:
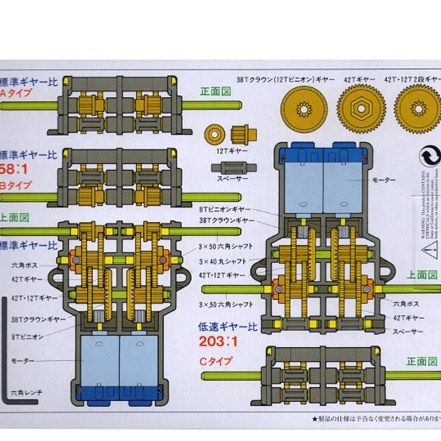
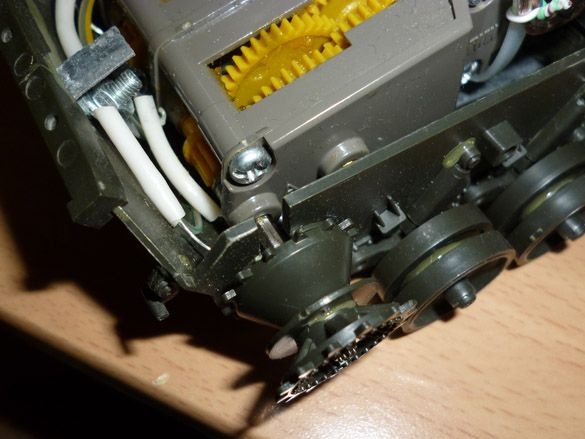
İlk durumda, dişli oranı 58: 1, ikinci - 203: 1'dir. İlk seçeneği kullanıyoruz. Şanzımanın çıkış milleri merkezi deliklerden geçirilmelidir. Şanzımanın yan gözleri kesilmeli, modelin kurulumuna müdahale edeceklerdir. Aksi takdirde, şanzımanın modele takılması oldukça basittir. Sonra motorlara küçük dişliler koyduk ve bunları dişli kutusuna yerleştirdik. Motorların her biri için, kontaklardan birine 2 ohm'luk bir direnç lehimlenmelidir. Bir teli dirence ve ikinci teli motorun ikinci kontağına lehimledik. Motorları kurmayı bitirdikten sonra, monte edilmiş dişli motorunu modele koyduk. Tutkal kullanarak sabitleyin.
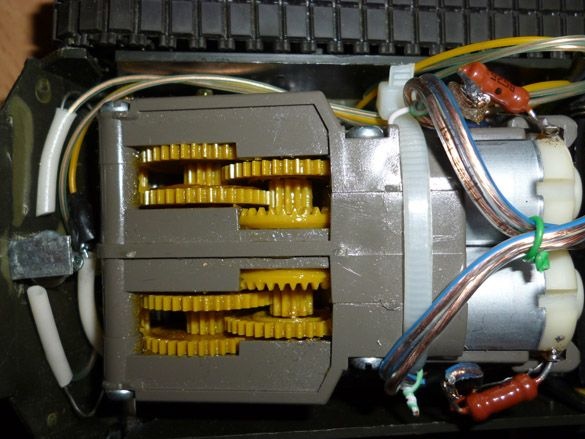
Ayrıca tahrik tekerleklerini çıkış şaftlarına da sürüyoruz.
Gelecek planları arasında taret döndürme işlevinin eklenmesi ve muhtemelen silah ateşlenmesi yer alıyor. Aşağıdaki talimatlarda bu değişiklikleri açıklamaya çalışacağım.
Adım 2 Elektrifikasyon.
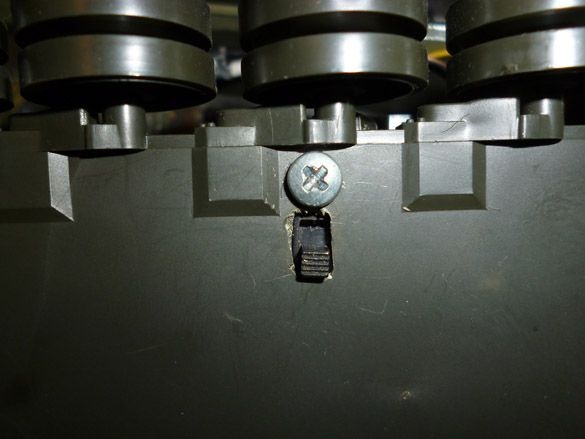
Modeli topladıktan ve tamamen kurumasını bekledikten sonra, elektronik doldurma. Alt kısımda anahtarı kesiyoruz:
İki pil bölmesi seri olarak lehimlenir ve birbirine yapıştırılır. Kabloların sonunda uygun bir konektör de çıkarıyoruz.

Modele güç vermek için AAA piller (“küçük olanlar”) veya Ni-Mn 1,2 volt AAA piller kullanabilirsiniz.
ESP8266'yı alın. Bu küçük ama oldukça işlevsel bir modüldür ve dahili Wi-Fi modülü ev Kablosuz ağ. 4 Mb belleğe sahip bir modül seçmenizi öneririm. ESP-8266 ESP'yi çalıştırmak ve yanıp sönmek için, minimum bir bağlama yapmalısınız. Modül 3.3 volt ile çalışır. Doğrudan stabilize edilmemiş bir güç kaynağına bağlanamaz. Bu nedenle, devreye bir voltaj stabilizatörü AMS 1117 3.3v ekliyoruz. VCC pimi doğrudan dengeleyiciden gelen pozitif güç kablosuna bağlanır ve kalan pimler: CH_PD, RESET, GPIO0, GPIO2, bir direnç yoluyla, yani güç kaynağına (VCC) çekilmelidir. 10kOm dirençlerin kullanılması tavsiye edilir, ancak 4.7kOm ila 50kOm arasındakilerle değiştirilebilir. Sadece GPIO15 direncini değiştirmek imkansızdır, yüz değeri 10k'ye kadar olmalıdır. Doğrudan, negatif güç kablosuna (GND) yalnızca GND'yi bağlarız. Modül ürün yazılımı moduna girmek için GPIO0'ın GND'ye bağlı olması gerekir. Düğme, yanıp söndüğünde modülü yeniden başlatmak için gereklidir. Tx, Rx, GND'nin sonuçları USB-TTL konektöründe yapılır. USB-TTL bağlantısı aşağıdaki gibidir:
ESP 8266 - USB-TTL
Tx - Rx
Rx - Tx
GND - GND
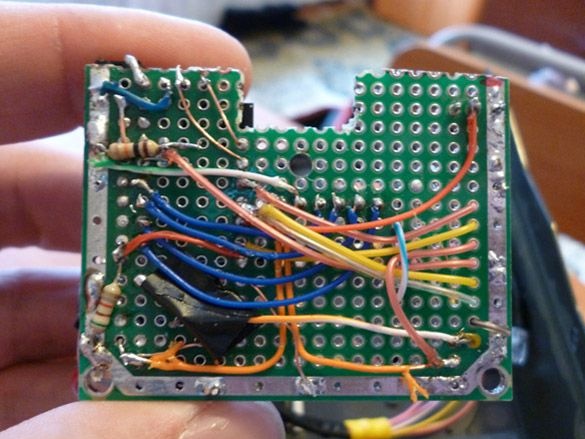
Şema aşağıdaki gibidir:

Hepsini küçük bir devre kartına yerleştirmek en uygunudur:
Devre kartını tankın arkasına sabitliyoruz:
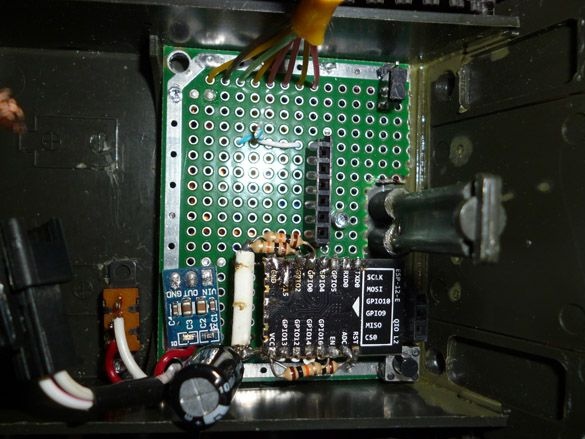
Akü bölmesi dişli motoru ile devre kartı arasına yerleştirilmiştir:

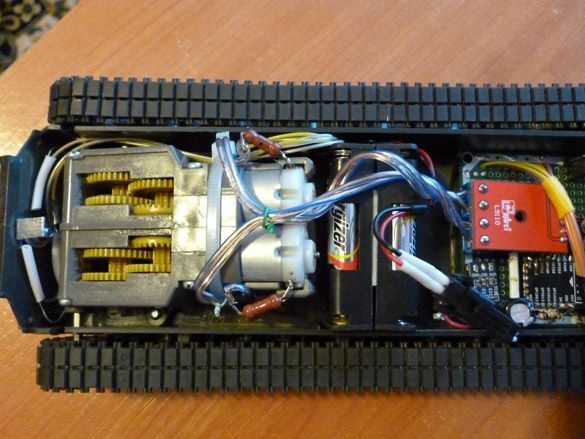
Monte edilmiş ve monte edilmiş tüm elektrik tankın alt kısmında bulunur:
Adım 3 Yazılım.
ESP'de çizimi düzenlemek ve doldurmak için indirmeniz gerekir Arduino Resmi siteden IDE
Arduino.cc.
Ardından Arduino IDE'yi yükleyin. Bundan sonra, ESP için eklentiyi yüklemeye devam ediyoruz. Bunu Kurul Müdürü aracılığıyla yapıyoruz. İlk olarak, Arduino IDE'yi başlatın, ardından Dosya - Ayarlar - Ek Anakart Yöneticisi URL'leri alanına bağlantıyı ekleyin:
http://arduino.esp8266.com/package_esp8266com_index.jsonTamam'ı tıklayın (bu alana virgülle ayrılmış birkaç bağlantı girebilirsiniz). Ardından filtre alanına Araçlar - Pano - Pano Yöneticisi'ne gidin, esp8266 girin ve ESP8266 Topluluk Forumu tarafından ESP8266'yı seçin. Yükle'yi tıklayın ve indirme işleminin bitmesini bekleyin. Şimdi Araçlar - Pano - Genel ESP8266 menüsünden seçiyoruz, modülünüzün frekansını 80 veya 160Mhz, flash belleğin boyutu olarak ayarlıyoruz. Ardından USB-TTL adaptörünün bağlı olduğu seri bağlantı noktasını seçin.
Şimdi ESP dosya sistemine erişmek için aracı yüklemeniz gerekiyor. Bunu yapmak için, arşivdeki dosyaları Arduino IDE'nin kök dizininde bulunan araçlar klasörüne taşıyın.
Adım 4 Çizim
Şimdi programlama ortamı hazır olduğuna göre, çizimi düzenlemeye geçelim. Çizimi açın:
Başında "String _ssid =" ";" alanını arıyoruz. Tırnak işaretleri arasında, hangi erişim noktasına bağlanmak istediğinizi belirtin.
"String _password =" ";" alanı - bu ağın şifresini kaydetmek için kullanılır.
ESP önceki satırlarda belirtilen ağa bağlanamazsa, denetleyici bağlanabileceği bir ağ oluşturur.
"String _ssidAP =" ";" alanı - oluşturulan ağın adını gösterir.
"String _passwordAP =" 12345678 ";" alanı - oluşturulan ağın şifresini ayarlar.
"String SSDP_Name =" ESP_Wi-Fi ";" alanı - SSDP'nin adını ayarlar.
Yukarıdaki tüm satırları düzenledikten sonra, web kabuğunu ESP 8266'ya yüklemeniz gerekir. ESP 8266'yı USB-TTL aracılığıyla bilgisayara yukarıdaki şemaya göre bağlarız. Arduino IDE'de Araçlar - ESP8266 Çizim Veri Yüklemesi'ni seçin. Dosya yükleme işleminin bitmesini bekliyoruz. Şimdi taslağın kendisini kaydedebilirsiniz. İlk olarak, ESP8266'yı donanım yazılımı moduna geçirin. Bunu yapmak için GPIO0'ı GND'ye bağlayın. Çizim doldurma düğmesine basın ve ardından EPS modülündeki sıfırlama düğmesine basın. Çizimin doldurulmasını bekliyorum.
ESP 8266 algoritmasını biraz açıklayacağım. Başlarken EPS, String _ssid alanında belirtilen Wi-Fi ağına bağlanmaya çalışır. Herhangi bir nedenle bu başarısız olursa, ESP ssidAP alanında belirtilen adla ağını yükseltir. İlk durumda, aynı ağa bağlı herhangi bir cihaz aracılığıyla tankı kontrol edebilirsiniz. İkinci durumda, ESP'ye herhangi bir cihaz, tablet, telefon veya bilgisayar üzerinden bağlanmanız gerekir. Ardından, tankı kontrol edeceğimiz cihazın tarayıcısında, tankın IP adresini girmeniz gerekir. IP adresini ESP'yi bilgisayara bağlayarak öğrenebilir, sonra terminal penceresini açıp ESP'yi yeniden başlatabilirsiniz. Başlatıldığında, tankın IP adresi terminal penceresine yazılır. Veya Wi-Fi yönlendiricinin ayarlarında ESP tarafından atanan sabit bir IP adresi belirleyebilirsiniz. Ayrıca, Windows ile bir bilgisayar kullanıyorsanız, ağ altyapısına girebilir, orada tankımızı bulabilir ve bağlanmak için üzerine çift tıklayabilirsiniz. ESP'nin kendisi erişim noktasını yükseltirse, tankın IP adresi 192.168.1.1 olacaktır.
Web arayüzü HTML olarak yazılmıştır ve iki sayfadan oluşur. İlki kontrol komutlarını içerir. İkincisi, ESP 8266'nın ayarlarını değiştirebilirsiniz. Ayarlar sayfasında, aşağıdaki parametreler değişiklik için kullanılabilir: bağlanmak istediğiniz erişim noktasının adı, bu erişim noktasının parolası, tankın adı, oluşturulan ağın adı ve bu ağa bağlanmak için kullanılan parola. Tüm değişiklikler ancak yeniden başlattıktan sonra geçerli olacaktır. ESP yeniden yükleme özelliği web arayüzünden de edinilebilir.
Tüm işleri tamamladıktan sonra, tank model boyalar kullanılarak boyanabilir. Boyalı tank daha güzel görünüyor:

Böyle bir iş için sabrım yok. Bu nedenle, modellerim boyamadan kaldı:

