


Tasarımımın bir kısmını Lego Technic 42049 ve Lego Technic 42041 montaj talimatlarından aldım. Gerisi benim doğaçlama. Kontrol için, android cihaz veya bilgisayarla ilişkili Bluetooth modülünü kullanacağım. Yani ihtiyacımız var:
- Lego Teknik 42029
- Lego Teknik 42033
- Arduino Pro Mini 5v AT Mega 328
- L9110S motor sürücüsü
- 1 servo sürücü SG-90
- Bluetooth modülü HC-05 veya eşdeğeri
- Arduino ürün yazılımı için USB-UART
- Motor şanzıman 6v 1: 150100 rpm
- 2 LED
- 2 direnç 150 ohm
- Kondansatör 10v 1000uF
- 2 tek sıralı tarak PLS-40
- İndüktör 68mkGn
- 6 NI-Mn 1.2v 1000mA pil
- Bağlayıcı baba-anne iki pimli tel
- Homutik
- Farklı renkteki teller
- lehim
- Rosin
- havya
- Cıvatalar 3x20, somunlar ve pullar
- 3x40 cıvatalar
- Cıvatalar 3x60
Adım 1 Arka Aks Komplesi
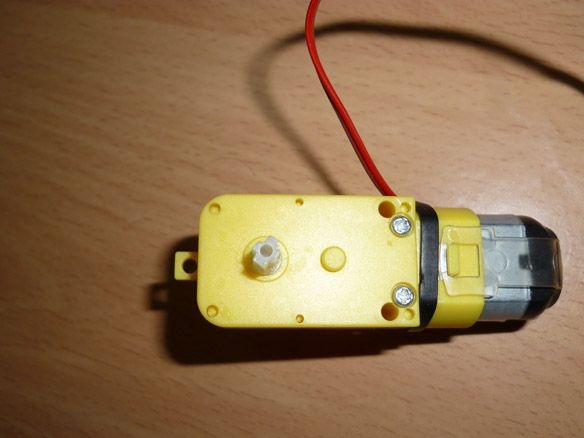
İleri - geri hareket, 6V motorlu bir dişli motor, 1: 150 dişli oranı ve 100 rpm'lik bir rölanti devri ile gerçekleştirilir. Başka bir dişli oranı deneyebilirsiniz, ancak bence bu en uygunudur. Her iki taraftaki şanzıman ekseni bir haç şeklinde kesilmeli ve lego detaylarına konulmalıdır:
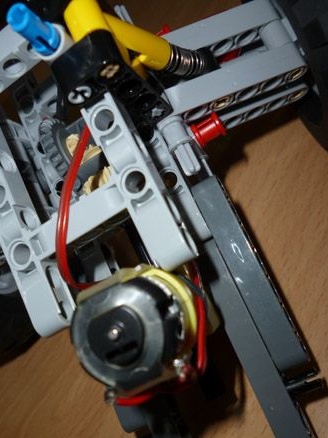
Ardından, arka aksın temelini 3 sayfadan 8'e kadar Lego 42029 bölüm 1'in talimatlarına göre topluyoruz. Motoru ve şanzımanı takabilmeniz için birkaç ayrıntı ekleyin.
Çevrimiçi dosyayı görüntüle:
Çevrimiçi dosyayı görüntüle:



Adım 2 Ön Aksın Montajı
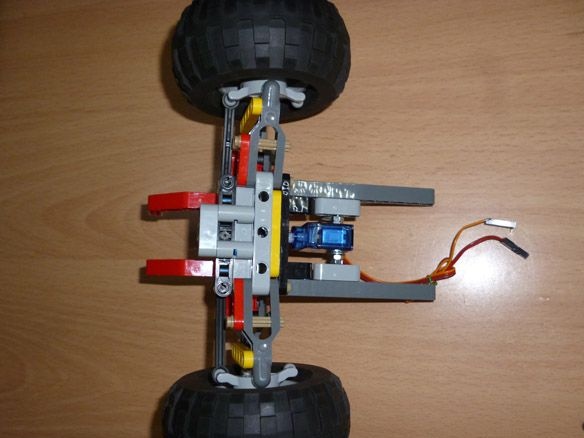
Süspansiyonun ön kısmını, sayfa 21'den 23'e kadar Lego 42029 bölüm 1'in talimatlarına göre monte ediyoruz. Sayfa 6'dan 11'e kadar Lego'nun ikinci bölümünden yamuk alıyoruz. Servo SG-90, tekerlekleri döndürmek için çok uygundur. Modelimize sabitlemek için, servonun iç kısımlarına, 3.2 mm çapında bir geçiş deliğine dokunmamak veya sadece bir kırtasiye bıçağıyla kesmek için dikkatlice delmek gerekir. Ayrıca çıkıntı yapan parçaları da kesin (sabitlemek için “kanatlar”). Yapılan deliğe bir cıvata takıp somunlarla sabitliyoruz. Servo şaft üzerinde, legodan vidalanmış bir parçası olan bir kol koyduk:





Adım 3 Taban ve kabinin montajı
Her iki köprüyü de resimde gösterildiği gibi bağlarız:
Kabini Lego 42041'in talimatlarına göre monte ediyoruz. İlk bölümün 39 ila 47 sayfalarından başlayarak. Ayrıca ikinci bölümün 5 ila 28. Sayfalarından. Ayrıca talimatların ikinci kısmının 38 ila 43 sayfalarındaki tampon.
Çevrimiçi dosyayı görüntüle:
Çevrimiçi dosyayı görüntüle:


Çevrimiçi dosyayı görüntüle:
Çevrimiçi dosyayı görüntüle:
Adım 4 Elektrik
Kontrol için Arduino Pro Mini ve Bluetooth modülünü kullanacağız. Pro Mini, herhangi bir Arduino kartı ile değiştirilebilir. Pro Mini'yi seçtim, bu yüzden en küçük olanı. Motoru bağlamak için motor sürücüsü gereklidir.
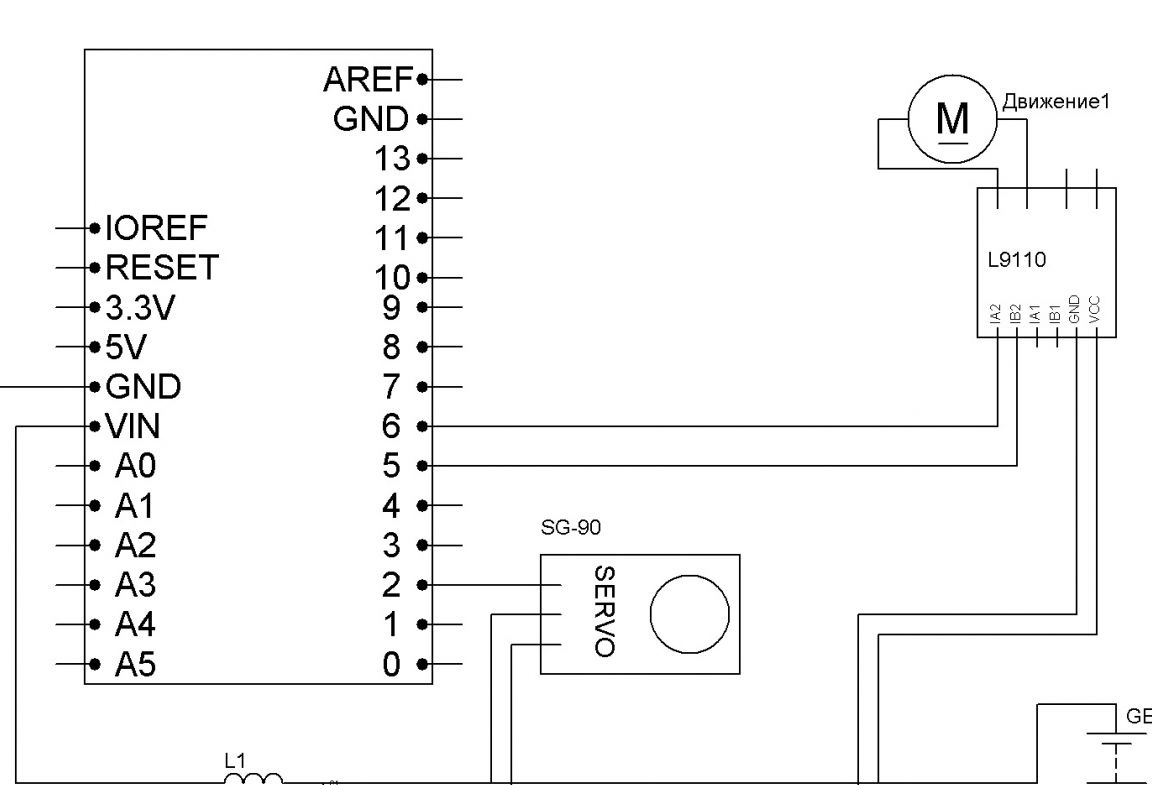
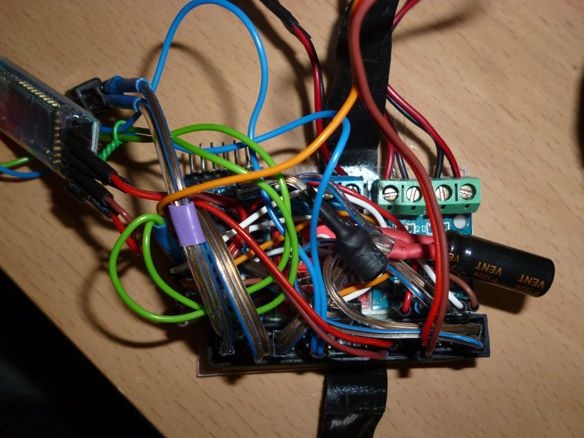
Tüm bileşenlerin Dupont anne-anne telleri ile bağlantısı. Güç - 6 NI-Mn 1.2v 1000mA pil seri olarak bağlanmıştır. Herhangi bir düşük güçte bir kapasitör, bir indüktör de bulacaksınız, mikrodenetleyicinin gücünü dengelemeniz gerekir. İki LED'in anotları 4 pinli arduinoya, katotlar GND'ye bağlanır. Kullanılan LED'ler için dirençler seçilir. Kolaylık sağlamak için pilleri bantla sarın.

Hepsini çift taraflı bir bant üzerine yapıştırıyoruz:
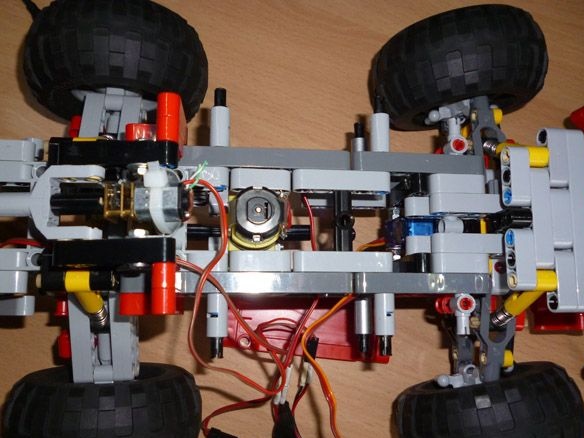
Elektrikçimizi tekerlekler arasına yerleştirip kapatıyoruz:
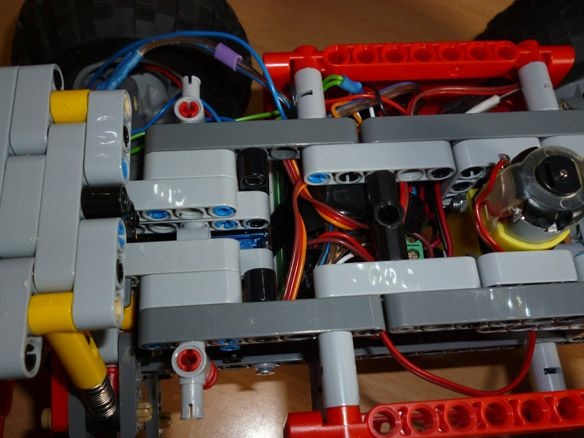
Birkaç vuruş ekleyin:


Adım 5 Bluetooth Kurulumu
Bugün en uygun fiyatlı Bluetooth modülleri HC-05 ve HC-06'dır. Çin online mağazalarında bol miktarda bulunurlar. Aralarındaki fark, birincisinin hem ana modda (bağımlı) hem de bağımlı modda (ana) çalışabilmesidir. İkincisi tamamen bağımlı bir cihazdır. Başka bir deyişle, HC-06 eşleştirilmiş bir cihazı algılayamaz ve onunla bağlantı kuramaz, sadece efendiye itaat edebilir.
Modüllerin kısa özellikleri:
- Bluetooth çipi - BC417143 tarafından üretilmiştir
- iletişim protokolü - Bluetooth Spesifikasyonu v2.0 + EDR;
- etki yarıçapı - 10 metreye kadar (güç seviyesi 2);
- SPP'yi destekleyen tüm Bluetooth adaptörleri ile uyumludur;
- Flash bellek miktarı (bellenim ve ayarları saklamak için) - 8 Mbit;
- radyo sinyalinin frekansı - 2.40 .. 2.48 GHz;
- ana bilgisayar arayüzü - USB 1.1 / 2.0 veya UART;
- güç tüketimi - iletişim sırasındaki akım 30-40 mA'dır. Ortalama akım değeri yaklaşık 25 mA'dir. Bağlantı kurulduktan sonra akım tüketimi 8 mA olur Uyku modu yoktur.
Genellikle modüller birbirine lehimlenmiş iki pano olarak satılır. Küçük olanı, çeşitli alanlarda yaygın olarak kullanılan bir fabrika modülüdür. elektronik cihazlar. Büyük - DIY için özel bir breadboard.
HC-05 ve HC-06 DIY modülleri şöyle görünür:
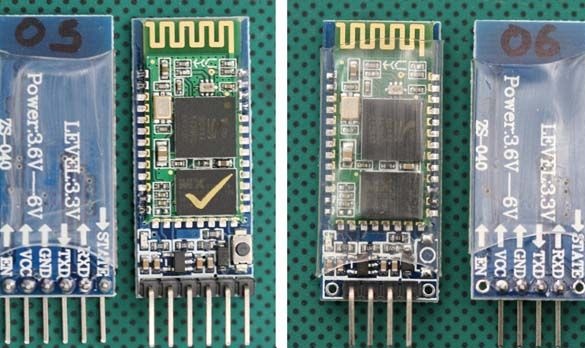
Prensip olarak, istediğiniz herhangi bir modülü kullanabilirsiniz. Breadboard içermeyen bir modül daha az maliyetlidir, ancak daha sonra modül için 3.3 V güç kaynağına dikkat etmeniz ve modüle kablo lehimleyerek kendinize işkence yapmanız gerekecektir. Bence fiyat / fonksiyonel oran HC-06 için en uygun olanı seçtim.
Aşağıdaki gibi bağlanıyoruz:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Düzgün çalışması için modülün yapılandırılması gerekir. Terminal penceresine girilen AT komutlarını yapılandıracağız. HC-05 modülünün kurulumuna bir örnek veriyorum. Farklı bir ayarınız varsa farklı olabilir. Modülümüzün komut alması için, önce Arduino'yu aşağıdaki bellenimle yanıp sönüyoruz:
Bu durumda, Arduino bilgisayarlar ve modül arasında bir köprü görevi görür. Ürün yazılımında SoftwareSerial kütüphanesini kullanıyorum. Yüksek hızlarda, dengesiz çalışır. Yüksek hız istiyorsanız, modülü doğrudan Arduino RX ve TX kontaklarına bağlayabilir ve ürün yazılımını yeniden yazabilirsiniz. Ama benim durumumda, modülle 9600 hızında çalışacağız. Bu yüzden bellenimden sonra terminali açın ve şunu girin:
“AT” (tırnak işaretleri olmadan) “OK” cevabı gelmelidir (her şeyin doğru bağlandığı ve modülün çalıştığı anlamına gelir)
“AT + BAUD96000” (tırnak işaretleri olmadan) “OK9600” cevabı gelmelidir.
Doğru cevabınız varsa, bir sonraki adıma geçin.
Adım 7 Yazılım
Bellenimi ve bellenimin kendisini yazmak için Arduino IDE kullanıyorum. Bugünün mevcut sürümü 1.8'dir. Aslında bellenim:
Adım 8 Telefonunuzu ayarlayın.
Bir Android telefonda, robotu Bluetooth üzerinden kontrol etmek için bir program yüklemeniz gerekir. Birçoğu var. Google oyuna “Bluetooth Arduino” girebilir ve zevkinize göre seçim yapabilirsiniz. BT Denetleyicisini beğendim. Android telefonunuza veya tabletinize indirin ve yükleyin. Ardından, Android ayarları aracılığıyla modülümüzle bir bağlantı kurmanız gerekir. Bağlantı şifresi “1234” veya “0000” dır. Ardından, programı uygun komutlar için yapılandırın. Liste aşağıda.
Adım 9 Computer Setup (gerekirse)
Gerekirse veya sadece kontrol kolaylığı için bir bilgisayar veya dizüstü bilgisayar kullanabilirsiniz. Bunu yapmak için bilgisayarda Bluetooth olmalıdır. Bilgisayardaki kontroller aracılığıyla modülümüzle iletişim kurarız. Ardından, komut göndermek için bir terminale ihtiyacımız var. Sizin için herhangi bir uygun.Ürün yazılımını kaydettikten sonra, kontrol aşağıdaki düğmelerle (komutlar) gerçekleştirilir:
W - ileri
S - geri
A - sol
D - sağ
F - durdur
G - direksiyon simidi
K - farlar
L - far kapalı
Komutları sürekli girmek elverişsizdir, bu yüzden komut göndermek için programı kullanmanızı tavsiye ederim. Z-Controller kullanıyorum. Programda, bağlantı noktasını (bağlantının yapıldığı com bağlantı noktasını) seçin ve komutların anahtarlarını yapılandırın. Boşta ve sezgisel olarak ayarlayın.
