


Hala birleştirme konusuyla ilgileniyorum Arduino ve Lego Technic. Ve bugün dört tekerlekli bir aracın üretimi için talimatları paylaşacağım. Olağandışı şekli için Mars gezgini olarak adlandırdım. Temel montaj talimatları Lego Technic 42029 ve daha sonra hayal gücümün uçuş alınacaktır. Kontrol için, android cihaz veya bilgisayarla ilişkili Bluetooth modülünü kullanacağız.
İhtiyacımız olacak:
- Lego Teknik 42029
- Lego Teknik 42033
- Arduino Pro Mini 5v AT Mega 328
- L9110S motor sürücüsü
- 1 servo sürücü SG-90
- Bluetooth modülü HC-05 veya eşdeğeri
- Arduino ürün yazılımı için USB-UART
- Motor şanzıman 6v 1: 150100 rpm
- 2 LED
- 2 direnç 150 ohm
- Kondansatör 10v 1000uF
- 2 tek sıralı tarak PLS-40
- İndüktör 68mkGn
- 2 adet Li-ion 18650 pil
- Bağlayıcı baba-anne iki pimli tel
- Homutik
- Farklı renkteki teller
- lehim
- Rosin
- havya
- Cıvatalar 3x20, somunlar ve pullar
- 3x40 cıvatalar
- Cıvatalar 3x60
- Büro veya sadece keskin bir bıçak
Adım 1 Mekanik parçanın hazırlanması.
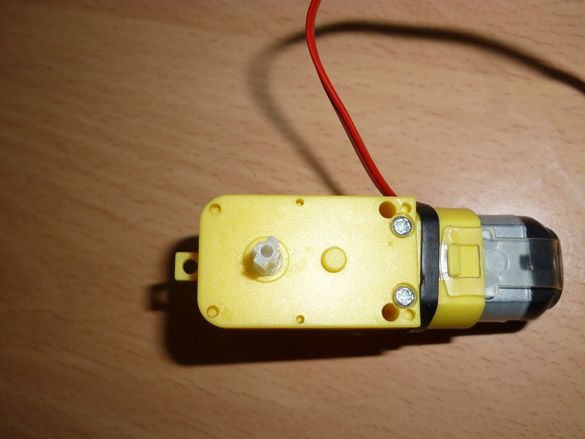
Modelimiz için 6v 1: 150 100 rpm dişli motor gereklidir ve arka aksı tahrik eder. Başka bir dişli oranı deneyebilir ve deneyebilirsiniz. Bence 100 rpm optimum. Dişli motor, Lego parçalarına bağlantı için tasarlanmamıştır. Bu nedenle, biraz yeniden yapılması gerekiyor. Keskin veya büro bıçağı dişli kutusunun çıkış şaftlarına çarpı şeklinde olmalıdır. Haç, normal Lego çapraz ekseni ile aynı boyutta olmalıdır.
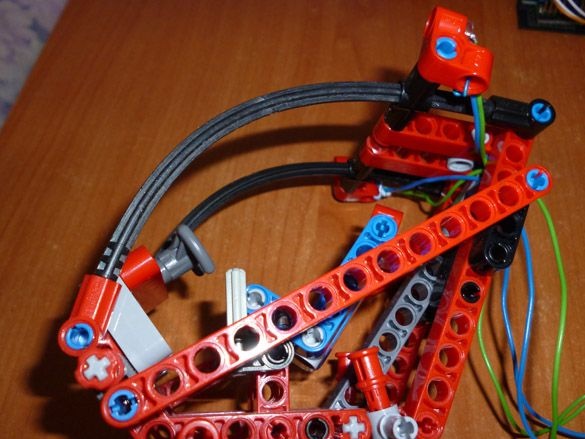
Tekerleklerin dönüşü için servo SG-90'ı kullanacağız. Ayrıca Lego parçalarına bağlanması da amaçlanmamıştır. Modelimize sabitlemek için, servonun iç kısımlarına, 3.2 mm çapında bir geçiş deliğine dokunmamak veya sadece bir kırtasiye bıçağıyla kesmek için dikkatlice delmek gerekir. Bu deliğe Lego ile bağlanmak için bir cıvata ekleyeceğiz. Ayrıca çıkıntılı parçaları da kesin (sabitlemek için “kanatlar”):

Servo şaft üzerinde, legodan vidalanmış bir parçası olan bir kol koyduk:

Adım 2 Montaj
Davayı monte etmek için Lego 42029 talimatına ihtiyacımız var. Resmi web sitesinden kolayca indirilebilir.
Hem birinci hem de ikinci parçaları indirmelisiniz.
Arka aksın tabanı, 3 sayfadan 8'e kadar olmak üzere Lego 42029 bölüm 1'in talimatlarına göre monte edilmiştir. Yayları takmak için biraz ekleyin:
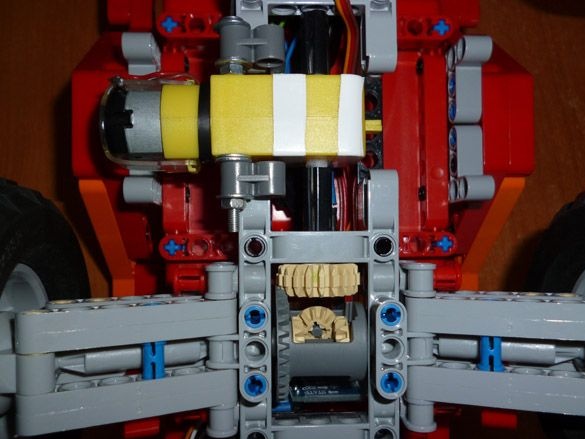
Redüktörlü motorun kesilmiş ekseninde Lego bağlantı manşonunu taktık. Şanzımanın kendisi, fotoğrafta gösterildiği gibi 3x60 mm'lik bir cıvata ile sabitlenmiştir:
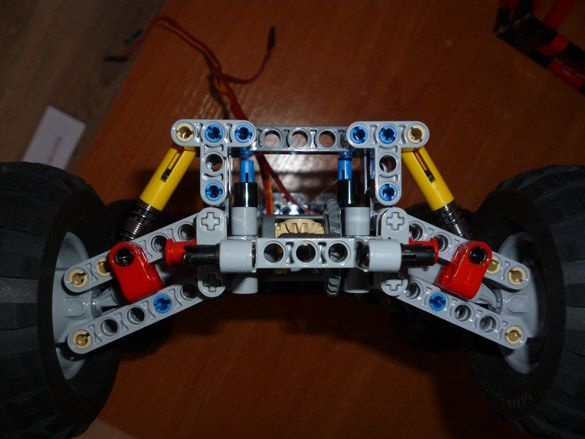
Biz ön tarafa geçiyoruz. Süspansiyonun ön kısmını, sayfa 21'den 23'e kadar Lego 42029 bölüm 1'in talimatlarına göre monte ediyoruz. Sayfa 6'dan 11'e kadar Lego talimatlarının ikinci bölümünden yamuk alıyoruz.

Ön tamponu fotoğrafta gösterildiği gibi inşa ediyoruz:

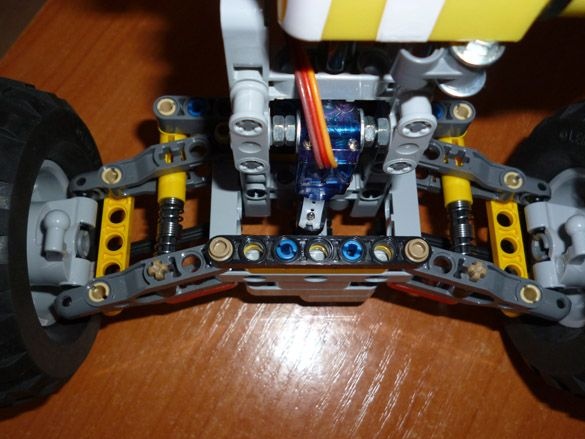
Servo sürücüyü yaklaşık olarak makinenin ortasına sabitliyoruz ve tekerlekleri döndüren bir dişli ile bir şaftla bağlarız:

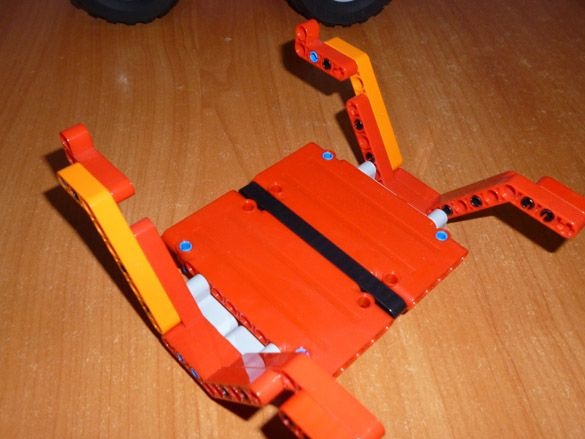
Her iki parçayı birbirine bağlarız. Aşağıdan her şey şöyle görünmelidir:

Kabin fotoğraflardan monte edilmelidir:

LED'leri far olarak ekleyin:

Kabini ön aksın üstüne yerleştirdik. Tamponu arkadan topluyoruz ve plakayı sabitliyoruz:

Orta platformu, fotoğraftan da monte etmeye devam ediyor:

Yerine koyun:


Bu davanın montajını tamamlar.
Adım 3 Elektrikçi.
Motorlara ve Bluetooth modülüne güç vermek için paralel olarak lehimlenmiş iki Li-ion 18650 pil kullanacağız. Ayrıca, bağlantı kolaylığı için, onlara bir konektör lehimlemeye değer:

Güç için Arduino, ayrı bir güç kaynağı, örneğin 9 voltluk taç kullanmak en kolay olanıdır. Pili oraya itmek istemiyorsanız, Arduino'yu aynı pillerden çalıştırabilirsiniz, ancak aynı zamanda pozitif Arduino güç kablosunun boşluğuna 68μH indüktör takın ve aynı güç hattına 10v 1000uF kapasitör bağlayın. Servo kontrol kablosunu pim 2'ye ve motor sürücüsünü pim 5 ve 6'ya bağlayın:
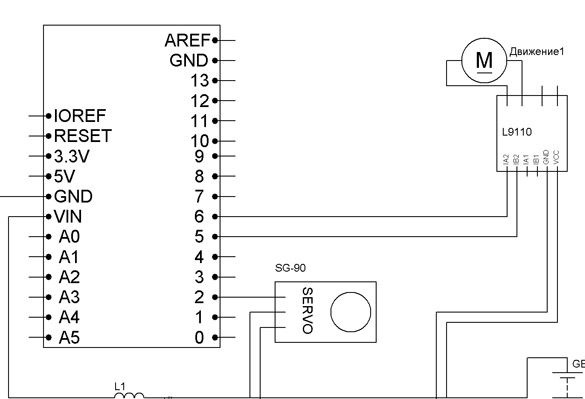
Farları da bağlayabilirsiniz. Bunu yapmak için, dirençler aracılığıyla iki LED'in anotlarını GND'ye katot olan 4 pinli Arduino'ya bağlarız. Kullanılan LED'ler için dirençler seçilir.
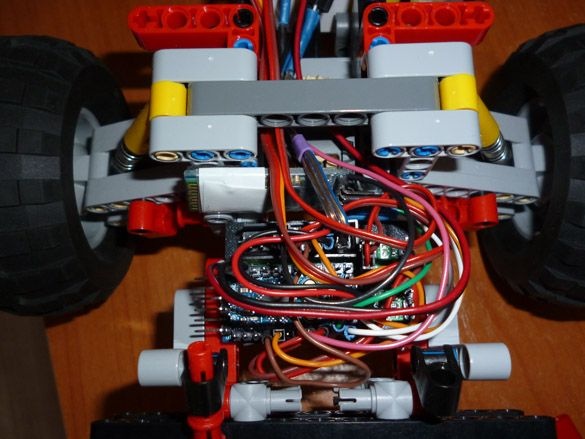
Tüm monte edilen elektrik çok fazla yer kaplamaz:
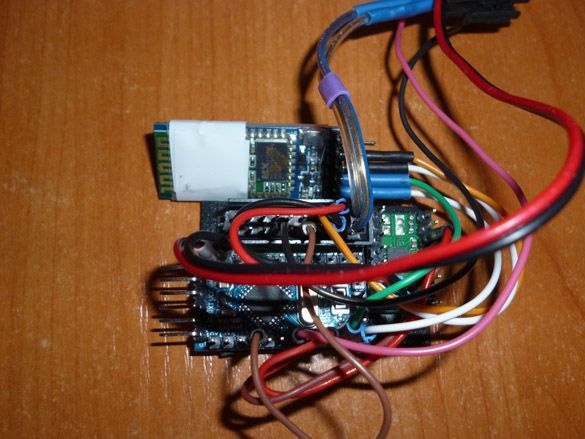
Büyük bir plaka altında, "gezici" nin arkasına yerleştiriyoruz:
Adım 4 Programlama ortamının hazırlanması.
Krokiyi yazmak için Arduino IDE'yi kullanacağız. Sürüm 1.8'den düşük olmamalıdır. Resmi siteden indirin.
Ardından, kütüphaneleri Arduino IDE'ye ekleyin. Bu proje iki kütüphane Servo.h (bir servo sürücüyü kontrol etmek için) ve SoftwareSerial.h (bir Bluetooth modülü ile iletişim kurmak için) kullanır:
Bunları indirip yüklemeniz gerekiyor. Bunu arşivleri açarak ve tüm dosyaları Arduino IDE'nin yüklü olduğu klasörde bulunan “kütüphaneler” klasörüne taşıyarak yapabilirsiniz. Veya başka bir yol kullanabilirsiniz - indirilen arşivleri paketinden çıkarmadan Arduino IDE'deki Sketch - Connect Library menüsünü seçin. Açılır listenin en üstünde ".Zip Kütüphanesi Ekle" öğesini seçin. Ve indirilen arşivlerin konumunu belirtin. Kitaplıkları kurduktan sonra, Arduino IDE'yi yeniden başlattığınızdan emin olun.
Adım 5 Bluetooth modülünü yapılandırın.
Bugüne kadarki en yaygın Bluetooth modülleri HC-05 ve HC-06'dır. Hem Çin çevrimiçi mağazalarında hem de Rus ithalatçıları arasında bol miktarda bulunurlar. HC-05 hem ana modda hem de bağımlı modda çalışabilir. HC-06 yalnızca bağımlı bir cihazdır. Başka bir deyişle, HC-06 eşleştirilmiş bir cihazı algılayamaz ve onunla iletişim kuramaz, sadece bir köle olabilir.
Kural olarak, modüller birlikte lehimlenmiş iki pano olarak satılır. Küçük olanı, çeşitli alanlarda yaygın olarak kullanılan bir fabrika modülüdür. elektronik cihazlar. Büyük - DIY projeleri için özel bir breadboard. BC417 yongalı daha küçük bir tahta gibi görünüyor:

Ve böylece DIY modülleri HC-05 ve HC-06 kendileri:
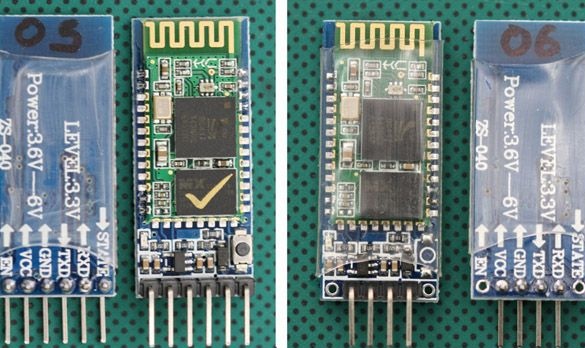
İstediğiniz modülü kullanabilirsiniz. Breadboard içermeyen bir modül daha az maliyetlidir, ancak daha sonra modül için 3,3 V güç kaynağına dikkat etmeniz ve modüle kablo lehimleyerek kendinizi eziyet etmeniz gerekecektir. Bence en uygun fiyat / fonksiyonel oran HC-05'i seçtim. Her zaman firmware ile, Bluetooth modülünün Arduino ile olan bağlantısını kesmek, bence, rahatsız edici, bu yüzden iletişim için yazılım portunu kullanacağız. Bu, SoftwareSerial kütüphanesi sayesinde mümkündür.
Aşağıdaki gibi bağlanıyoruz:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Düzgün çalışması için modülün yapılandırılması gerekir. Kurulum terminal penceresine AT komutları girilerek yapılır. HC-05 modülünü yapılandıracağım. Farklı bir ayarınız varsa farklı olabilir. Bilgisayarı ve Bluetooth modülünü bağlamak için Arduino'daki bir sonraki çizimi doldurmanız gerekir. Aynı zamanda, Arduino, Bluetooth modülü ile bilgisayar arasında bir bağlantı görevi görecektir:
Çizimi doldurduktan sonra terminal penceresini açın, hızı 9600 olarak ayarlayın ve aşağıdaki komutları girin:
“AT” (tırnak işaretleri olmadan) “OK” cevabı gelmelidir (her şeyin doğru bağlandığı ve modülün çalıştığı anlamına gelir)
“AT + BAUD96000” (tırnak işaretleri olmadan) “OK9600” cevabı gelmelidir.
Doğru cevabınız varsa, bir sonraki adıma geçin.
Adım 5 Arduino'daki çizimi doldurun.
Bir sonraki adım, aşağıdaki çizimi indirip Arduino'ya yüklemek:
Adım 6 Telefonunuzu ayarlayın.
Bir Android telefon için robot kontrol programını Bluetooth üzerinden kurmamız gerekiyor. Görünüş ve işlevsellik açısından çok, farklı. Google oyuna “Bluetooth Arduino” girmeniz ve istediğinizi seçmeniz gerekiyor. BT Kontrolörünü tavsiye ederim. Ücretsizdir ve makinemizi kontrol etmek için yeterli işlevsellik vardır. Herhangi bir Android cihazına indirin ve yükleyin. Ardından, Android cihazının ayarları aracılığıyla modülümüzle bir bağlantı kurmanız gerekir. Bağlantı şifresi “1234” veya “0000” dır. Ardından programı uygun komutlar için yapılandırın. Liste aşağıda.
Adım 7 Windows'u Yapılandırma (gerekirse)
Bir masaüstü bilgisayar, dizüstü bilgisayar veya windows cihazı kullanmak isteyenler için Bluetooth kanalı üzerinden komut göndermenizi sağlayan bir program var. Bunu yapmak için, bu cihazda Bluetooth olmalıdır. Cihaz yönetim araçları ile modülümüzle iletişim kuruyoruz. Bağlantı şifresi aynı “1234” veya “0000” dır. Terminali komut göndermek için kullanabilirsiniz. Sizin için herhangi bir uygun. Ürün yazılımını yazdıktan sonra, kontrol aşağıdaki düğmelerle gerçekleştirilir (takımlar tarafından):
W - ileri
S - geri
A - sol
D - sağ
F - durdur
G - direksiyon simidi
K - farlar
L - far kapalı
Terminali kontrol için kullanmak çok uygun değildir. Bu nedenle, Z-Controller'ı tavsiye ederim. Programda, bağlantı noktasını (bağlantının yapıldığı com bağlantı noktasını) seçmeniz ve karşılık gelen komutların anahtarlarını yapılandırmanız gerekir. Boşta ve sezgisel olarak ayarlayın. Ben programın kendisini ve bizim "gezici" için ayarları sonrası:
