Eğitimi sırasında yazar, telefonunda ivmeölçer desteği olan oyunlar oynadı. Telefonda sadece eğerek bir araba sürmeyi gerçekten sevdi ve sonra gerçek hayatta aynı kontrole sahip bir araba yapmayı hayal etmeye başladı. Şimdi sahip Arduino ve programlama becerilerini edindikten sonra, Android'de yönetilen bir makine yaratmanın zamanı geldi, ona Hercules dedi.
Büyük tork ve yüksek hız nedeniyle bu ismi aldı. model Bluetooth üzerinden bir Android telefon kullanılarak kontrol edilebilir. Bu işletim sistemine sahip herhangi bir telefon kontrol için uygundur, yazar bir uzaktan kumandayı sınırlamaz. Ayrıca, telefon kullanarak para tasarrufu, çünkü bir uzaktan kumanda oluşturmak için para harcamak zorunda değildi.
Malzemeler ve araçlar:
- Arduino Uno
- Bluetooth alıcı-verici
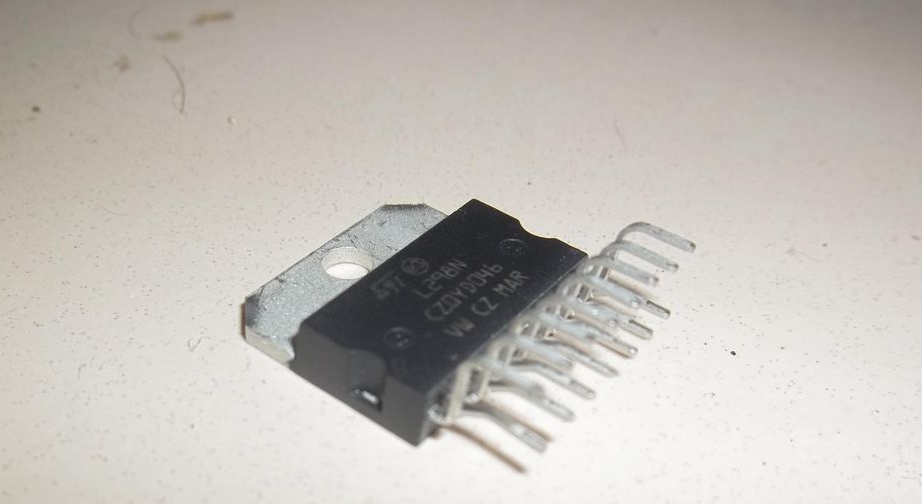
- Çift motor sürücüsü (L298 H köprülü)
- Vitesli motorlar 4 adet (makinenin uygulamasına bağlı olarak güç seçilir)
- Tekerlekler 4 adet
- Akü 1Ah SLA 12V
- Bileşenler için taban (şasi)
- breadboard
- Muhafaza kutuları 4 adet
- SPST anahtarı
- Arduino için bağlantı telleri
- Lehim telleri
- Küçük boyutlu somunlar ve vidalar
- Direnç 10 kOhm 1 adet
- Direnç 20 kOhm 1 adet
- Android telefon
- havya
- lehim
- lehim pastası
- matkap





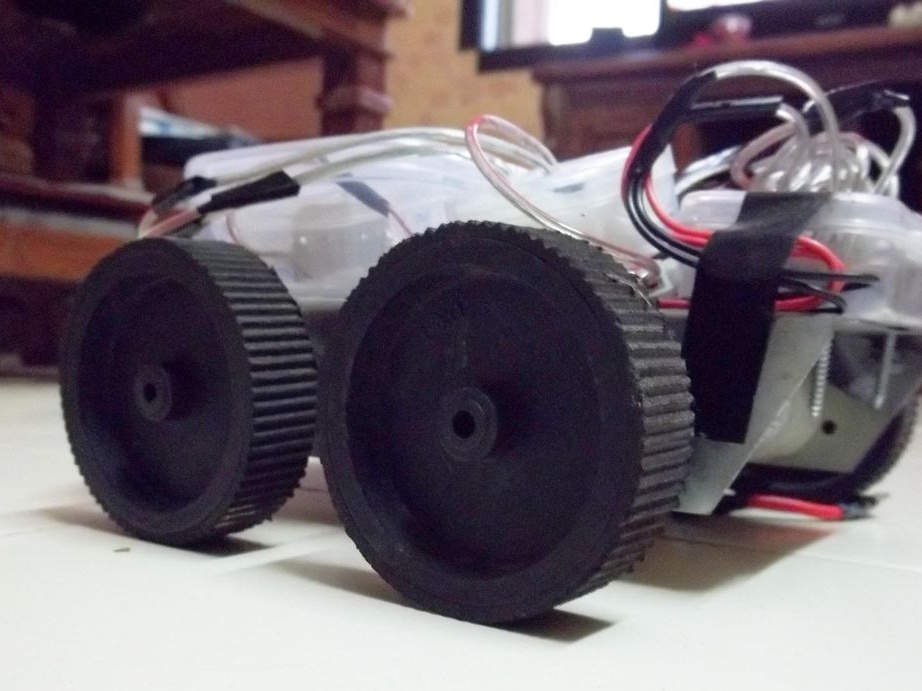
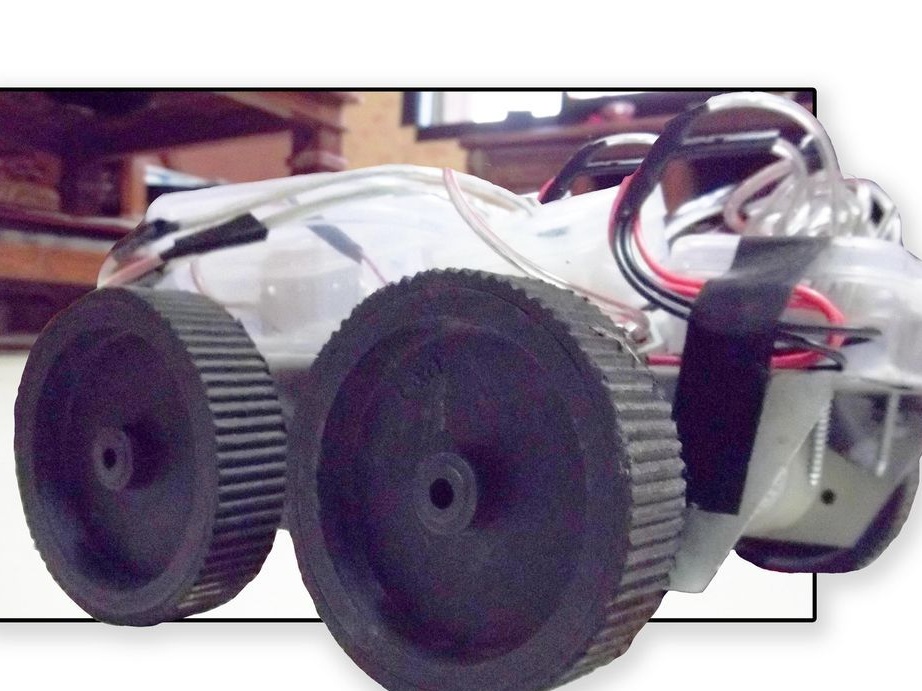
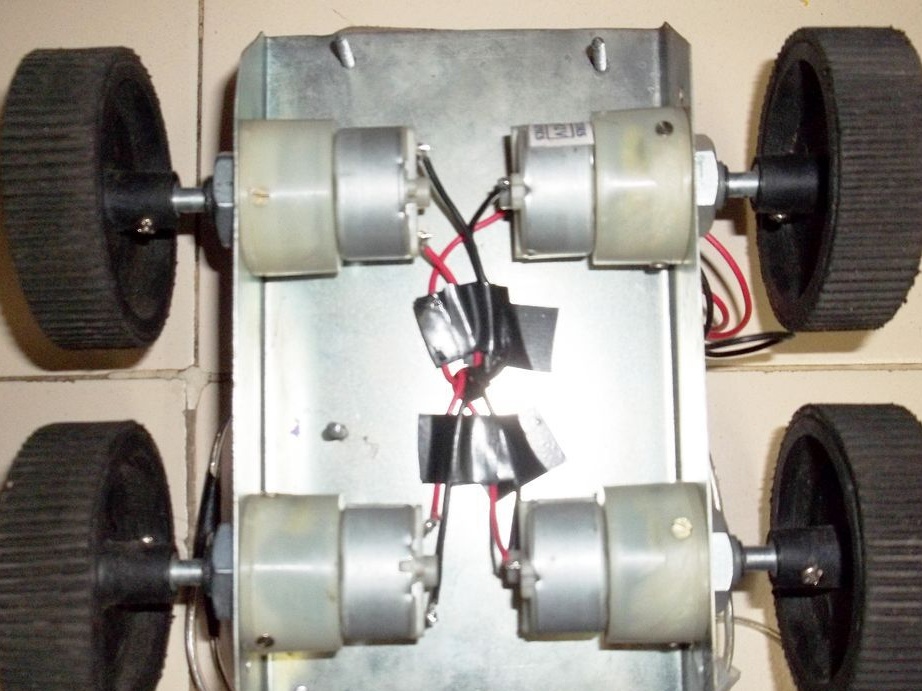
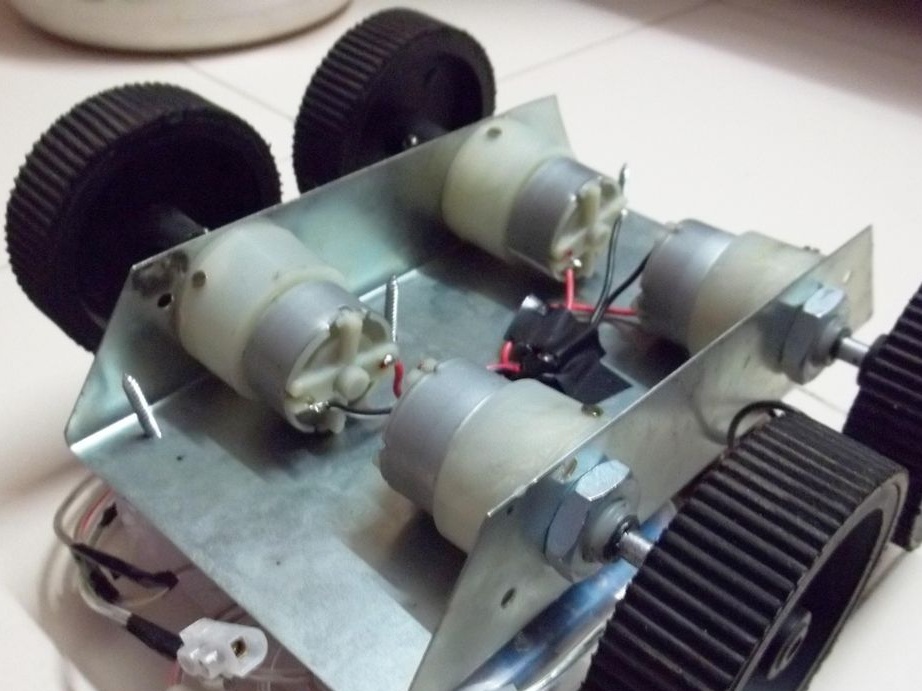
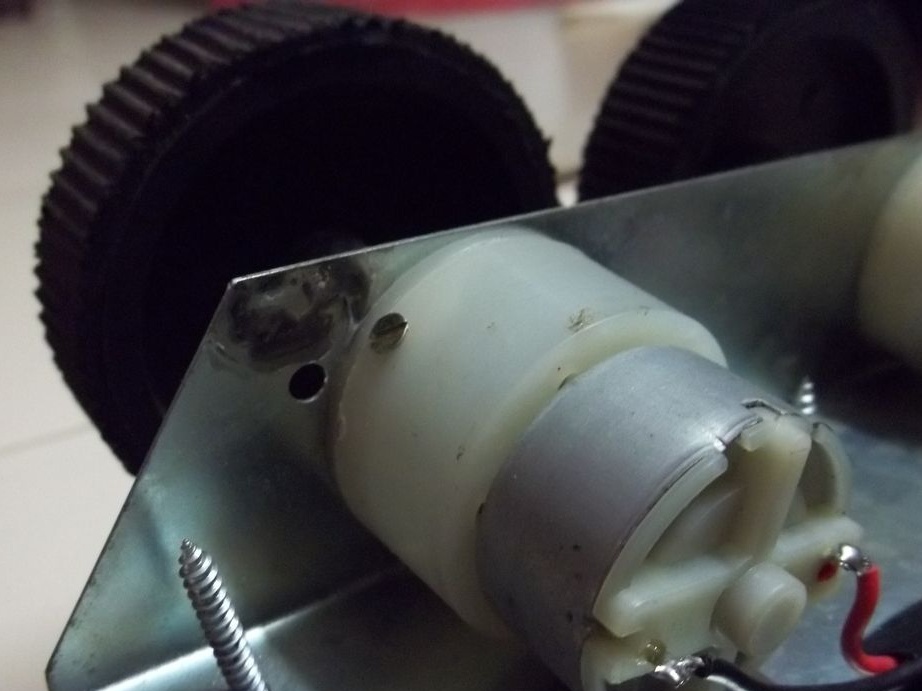
İlk adım. Tekerlekler ve şasi.
Motor vidaları somunları kullanarak şasiye monte etmeyi kolaylaştırdı. Tekerlekler, motor şaftına kadar monte edilmiştir. İki sağ motor ve iki sol motor birbirine paralel olarak açılır. Dört tekerlek ve motor takıldıktan sonra şasinin görünümü aşağıdaki fotoğrafta görülebilir.
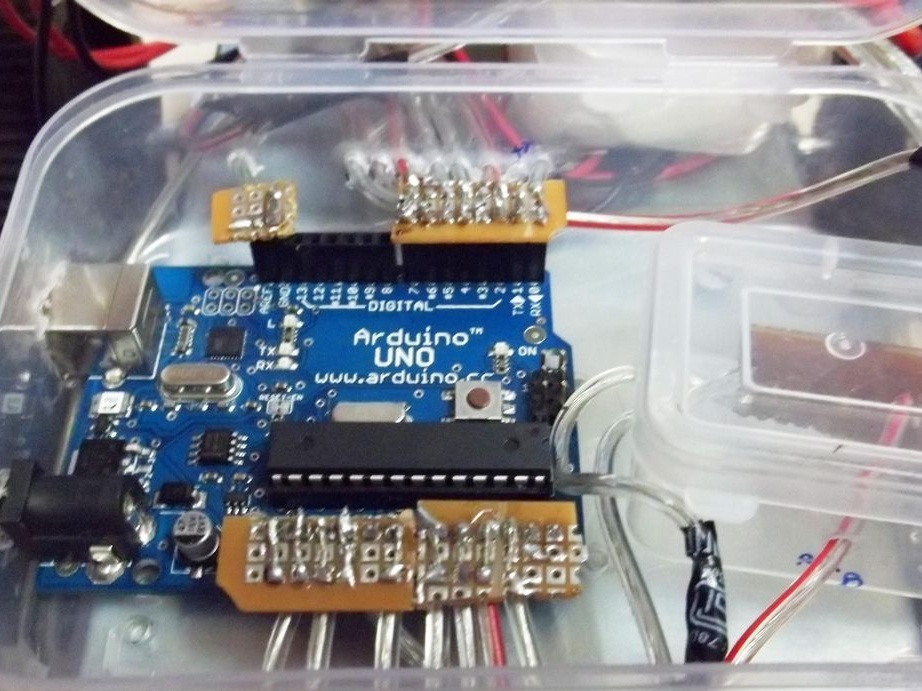
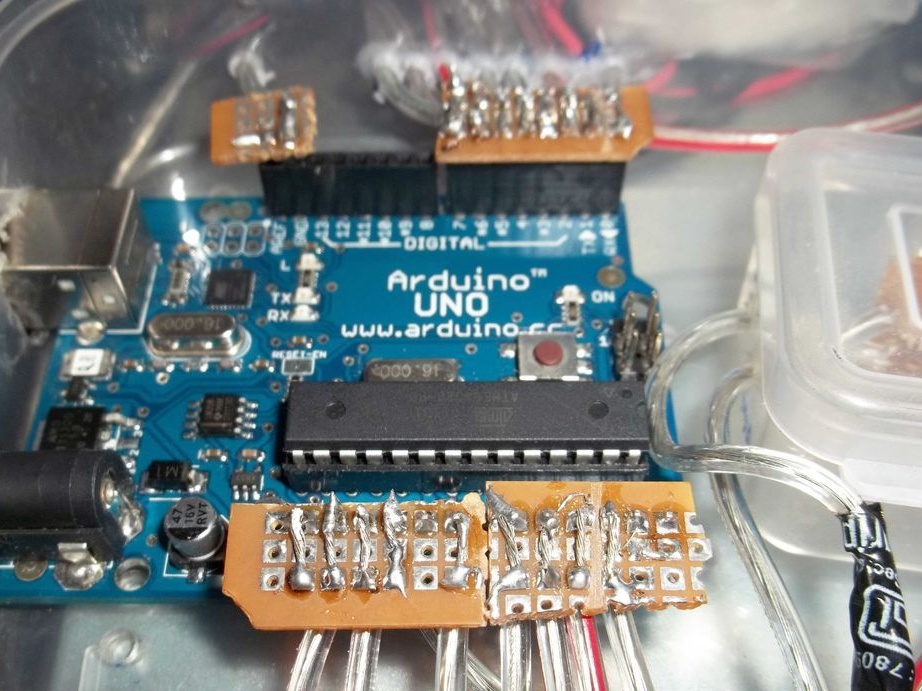
İkinci Adım Arduino için konut.
Arduino için vaka diyagramı birkaç bölüme ayrılmıştır. Böyle modüler bir tasarım çözümü gelecekte devreyi desteklemeye veya olası bir arızayı ortadan kaldırmaya yardımcı olacaktır. Bileşenlerden biri bozulursa veya yanarsa, hızlı bir şekilde ve tasarımı bozmadan değiştirilebilir. Arduino'nun kutusu aşağıdaki gibi oluşturuldu:
- İki parça 8x3 delikli, ikinci iki parça 6x3 olan breadboard'dan dört parça kesildi.
- BLS pimleri uzun taraftaki her bir panoya lehimlenmiştir.
- Breadboard üzerindeki her pim yaklaşık 10 cm uzunluğunda tellerle lehimlenmiştir.Bu, tellerin Arduino'dan çıkmaması için yapıldı, çünkü şimdi yük eşit olarak dağıtılmaya başladı.
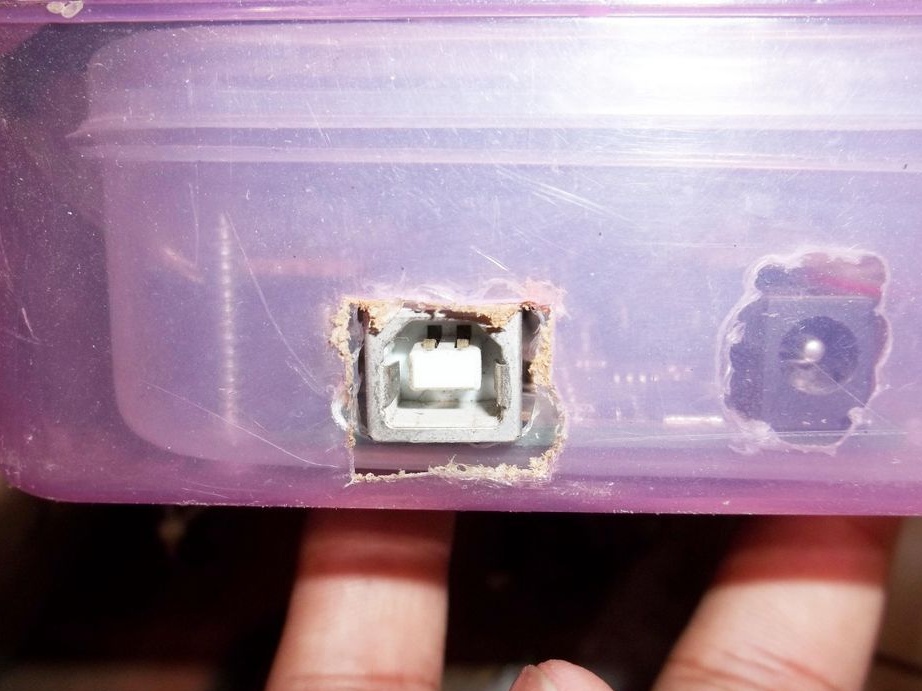
- Ardından, USB çıkışı duvara dokunacak şekilde Arduino kartı kasaya yerleştirildi. Bu çıkış için bir delik kesildi, bu makineye ek programlar yüklenmesine veya mevcut programlarda düzeltmeler yapılmasına yardımcı olacaktır. Kutunun yanlarında, tahtadan gidecek teller için delikler kesildi. Kutunun altında, Arduino montaj konektörlerinin altında ek delikler kesildi.


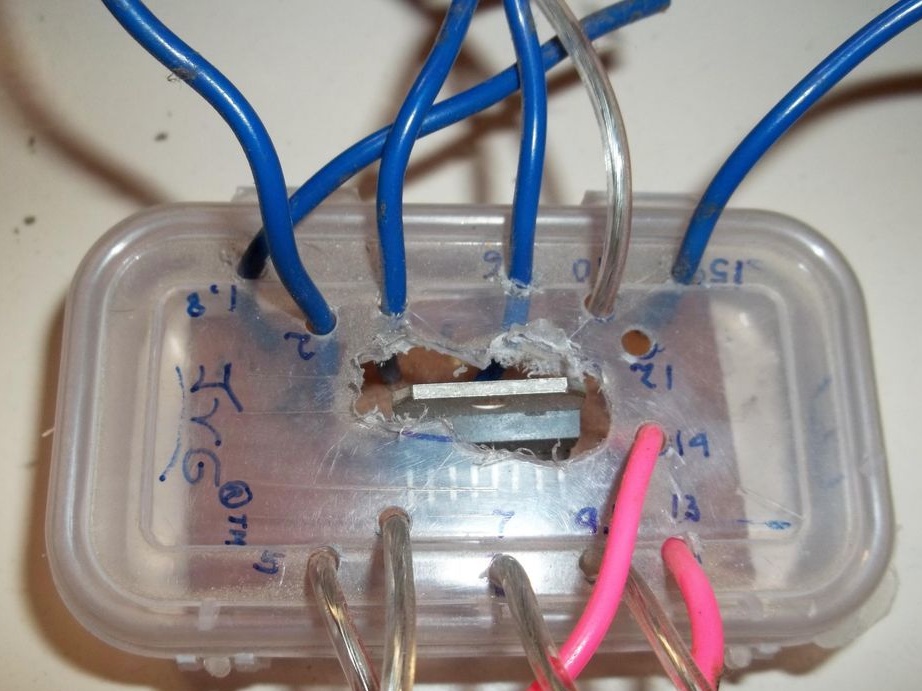
Üçüncü Adım Bluetooth alıcı-verici.
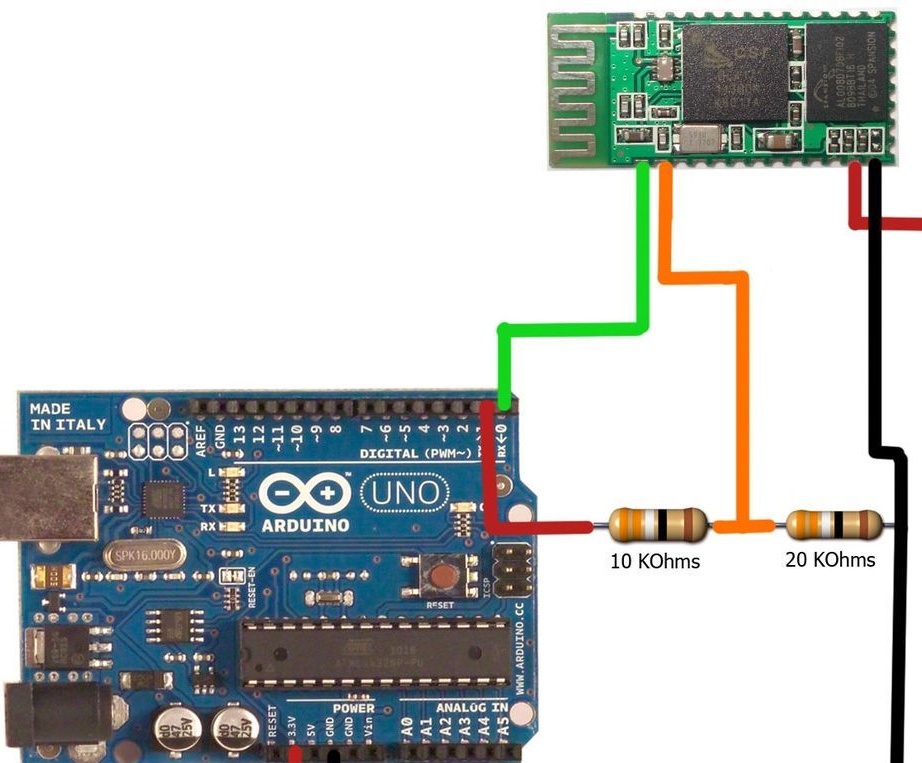
Kabloları bir Bluetooth alıcı-vericiye lehimlemek, bu projenin montajında en zor görevdir, yazar lehimleme sırasında gerçekten üçüncü bir elden yoksundu. 10 cm uzunluğunda dört iletken kullanıldı; 1 (Tx), 2 (Rx), 12 (+ 3.3B) ve 13 (GND) pimlerine lehimlendi. Şimdi alıcı-verici teller için önceden hazırlanmış deliklere sahip bir yuvaya yerleştirilebilir. Yazar, tellerin kontakları yırtmasını önlemek için telleri kutuya yapıştırdı.



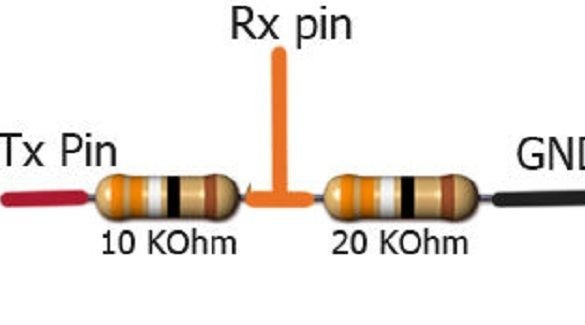
Dördüncü adım. Dirençler için muhafaza.
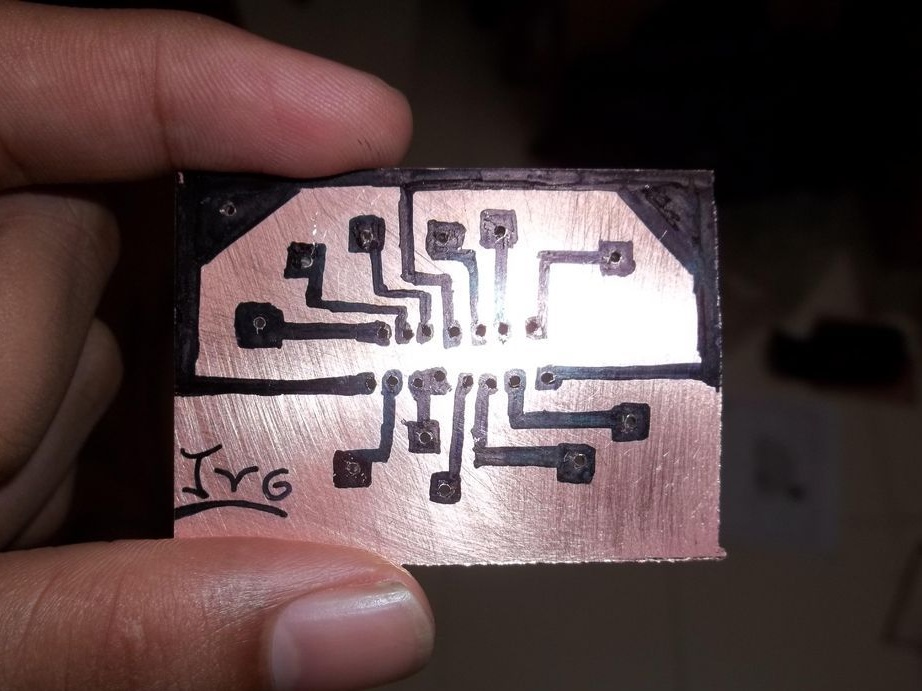
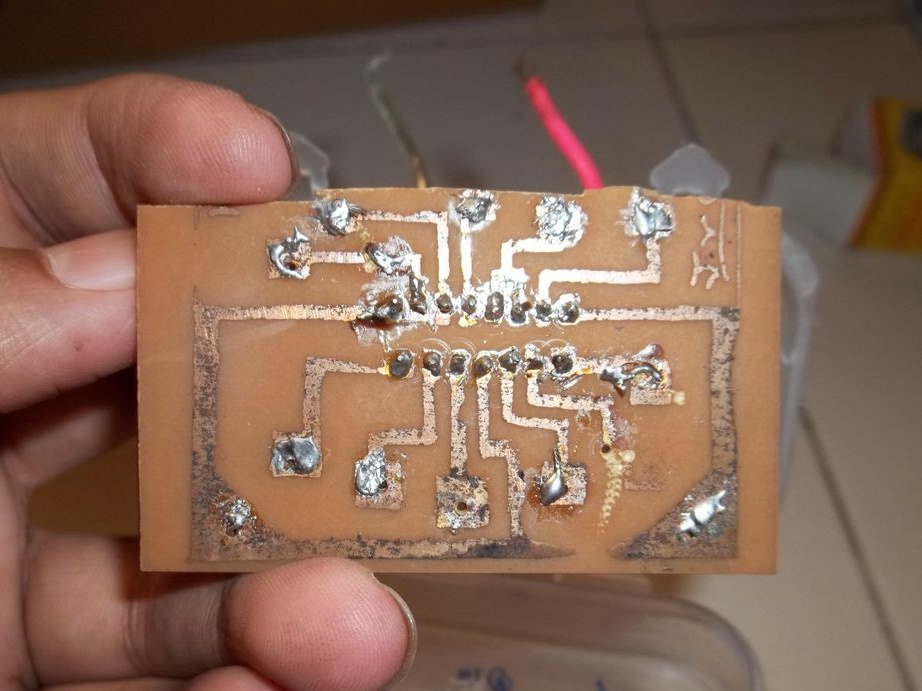
Arduino Tx çıkışının 5V voltajlı bir sinyal göndermesi ve Bluetooth modülü 3.3V voltajla çalışması nedeniyle 5V'yi 3.3V'a dönüştürmek gerekiyordu. Bu görev için yazar bir voltaj bölücü kullandı. Aşağıda sağlanan devreye göre, breadboard'un kalan parçasına bir direnç lehimledi. Tabii ki, bu devreyi bir Arduino kasasına koymak mümkün oldu, ancak yeterli alan yoktu, bu yüzden yazar dirençler için ayrı bir tane yaptı.


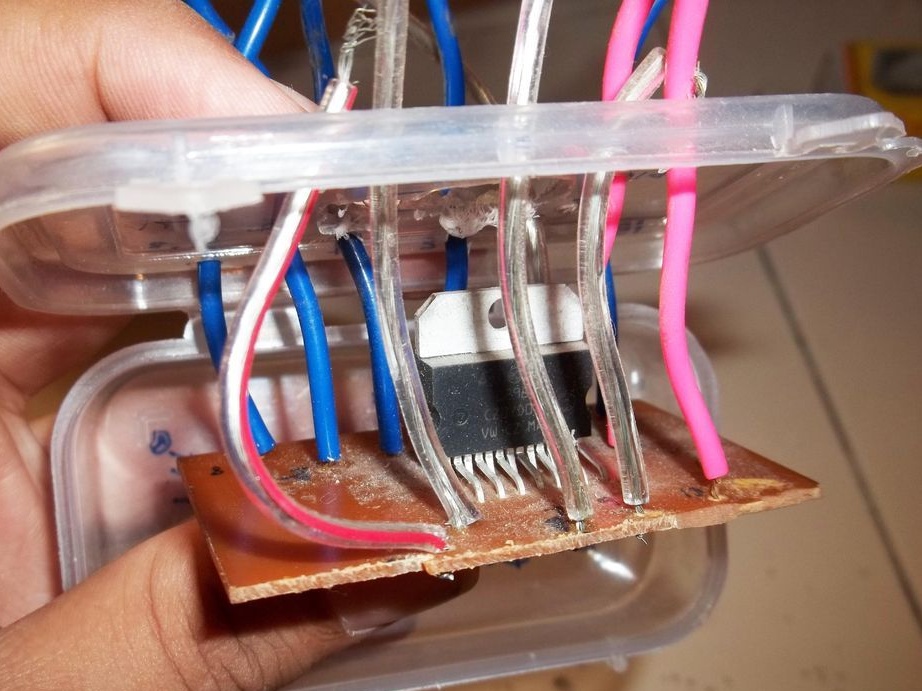
Beşinci Adım Motor sürücüsü.
Yazar, H köprüsü L298 IC ile çift sürücü kullanıyor, dört motoru kontrol ediyor. Onun için yazar, aşağıdaki fotoğrafta tahtanın tellerini kolaylaştırmak için bir tahta oluşturdu. Lehimlemeden sonra, sürücü ayrıca teller için delikleri olan ayrı bir kasaya yerleştirildi.
Altıncı Adım Son toplantı.
Her bir bileşen, şemaya göre Arduino'ya bağlanır.
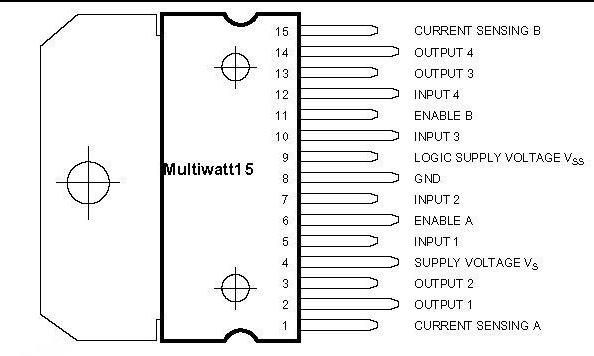
Motor sürücüsünün Arduino ile bağlanması bu pin çıkışına göre gerçekleşti:
1'den GND'ye
2 sol motorun ilk kontağına
3 sol motorun ikinci kontağına
4 ila 12 V batarya
Arduino 2'yi sabitlemek için 5
6 pin Arduino 3'e
7 pin arduino 4
8'den GND'ye
Arduino ile 9 ila 5V
Arduino 5'i sabitlemek için 10
11 pin arduino 6
12 pin Arduino 7'ye
13 doğru motorların ilk kontağına
14 doğru motorların ikinci kontağına
15'den GND'ye
12V güç, L298'in Vin Arduino pinine ve pin 4'üne bağlandı. GND güç kaynağına sırasıyla GND Arduino.
Yedinci adım. Arduino için program.
Programın düzgün çalışması için, indirilebilen Amarino kütüphanesini kurmak gerekiyordu. Arduino'nun kaynak kodunu makalenin altından indirebilirsiniz.
Sekizinci Adım. Android için yazılım
Amarino Library, Android akıllı telefonlarla çalışmak için bir araç setidir. Telefonunuza ek bir uygulama yükleyerek bir program yazmaya başlayabilirsiniz.
Amarino uygulaması ve eklentisi indirilebilir. Onları telefona kurduktan sonra, sadece makineyi açıp bağlanmak ve Olay Ekle-> İvmeölçer Sensörü bölümünü seçmek kaldı.
Amarino ve eklentilerini yükleyen video:
Makinenin hızı telefonun eğimine eşittir. Makine yanlış yönde hareket ederse, kabloları motorlardan değiştirmeniz gerekir.