
BIBOT-1 robotunun özelliği, iki görevi yerine getirebilmesidir. Bir ışık kaynağının arkasına veya kağıda çizilebilecek siyah bir çizgi boyunca hareket edebilir. Robot ayarlarda çok esnektir, yani daha sonra istenen koşullara göre özelleştirilebilir, yani ışığa veya daha az duyarlı hale getirilebilir. Motorların dönme hızını ayarlamak da mümkündür, bu, özellikle çizgi boyunca hareket ederken robotun daha iyi çalışmasına izin verecektir.

Cihaz ve robot prensibi:
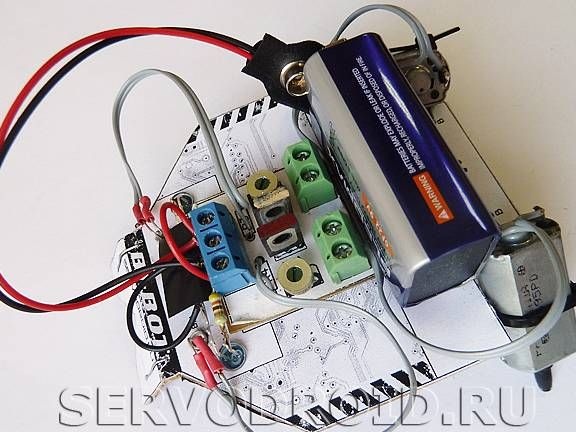
Şablon yazıcıya yazdırılırken robotun tabanı kartondan yapılır ve sonra çöker. Radyo bileşenlerinin modülüne gelince, temel olarak bir textolite alındı, modül robotun tabanına tutturuldu. Vücudu daha sert hale getirmek için tasarımda özel kaburgalar kullanılır.
Motorlar bunların çoğunda olduğu gibi monte edilir DIY, yani bir açıyla. Bu nedenle, tekerlekleri ve şanzımanı takmaya gerek yoktur. Şaftların yüzey üzerinde kaymasını önlemek için üzerine koruyucular konur.
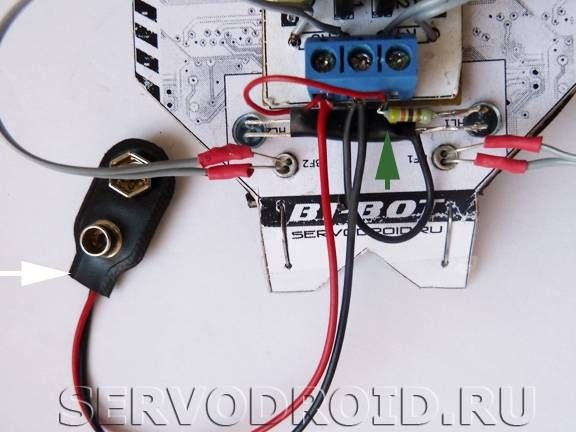
9V tip 6F22 pil, güç kaynağı olarak kullanılır. Pil bantla birlikte takılır ve her zaman kolay değiştirme için kullanılabilir.
Anahtara gelince, arabalar yüklemekten kaçınmaya karar verdi. Robot, bataryaya takılan klipsi değiştirerek açılır ve kapanır.
Ve son olarak, robotun ayarlanması. Robotun hassasiyetini ayarlamak için sistemde iki ayar direnci bulunur. Döndüklerinde, robotun hassasiyetini ışığa ayarlayabilir ve ayrıca motorların dönüş hızını da ayarlayabilirsiniz. Robot ışığa ne kadar duyarlı olursa, o kadar hızlı hareket eder ve bunun tersi de geçerlidir.
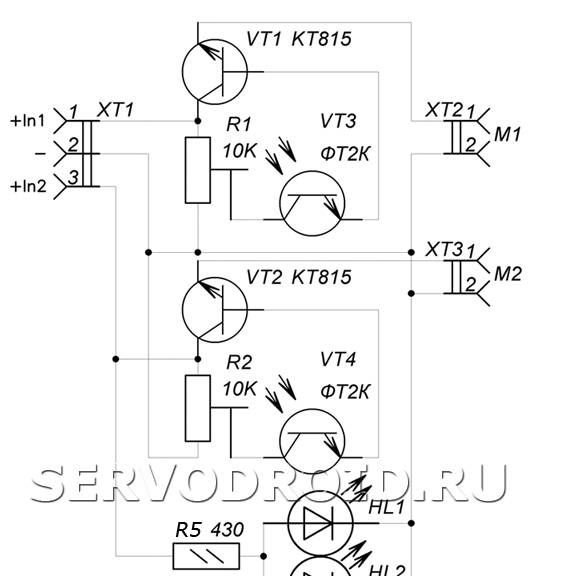
Çalışma prensibine gelince, her şey şemada belirtilmiştir.
Malzemeler ve araçlar:
- 9V pil ve bağlantı için klips;
- motorları bağlamak için iki konektör (iki bölümlü klemensler);
- motorlar;
- naylon şap;
- koruyucu (kauçuk rulo);
- iki fototransistör;
- iki kızılötesi LED;
- zımbalayıcıdan bir braket;
- güç kaynağı bağlantısı için üç bölümlü terminal bloğu;
- ayar direnci.

Üretim süreci:
İlk adım. PCB tasarımı
Ücret LUT yöntemi ile oluşturulur. Çalışmadan önce fiberglasın yüzeyi iyice temizlenmeli ve sonra yıkanmalı ve iyice kurutulmalıdır. İmalattan sonra, iletken hatlar kısa devre için bir multimetre ile kontrol edilmelidir.
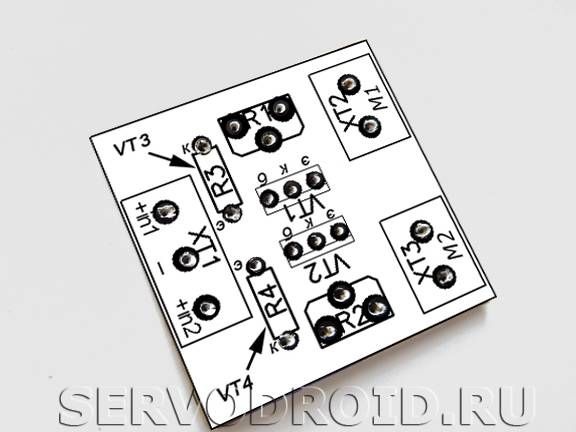
İkinci Adım tesisat elektronik eleman
Ardından, kağıda basılmış bir çizim almanız ve oluşturulan panoya yapıştırmanız gerekir. Bu durumda, kağıt ve PCB'deki delikler tam olarak eşleşmelidir. Daha sonra, radyo bileşenleri şemada gösterildiği gibi kurulur. Çalışma sürecinde, R3, R4 dirençlerinin kurulumu VT3, VT4 fototransistörlerini kurmalıdır.
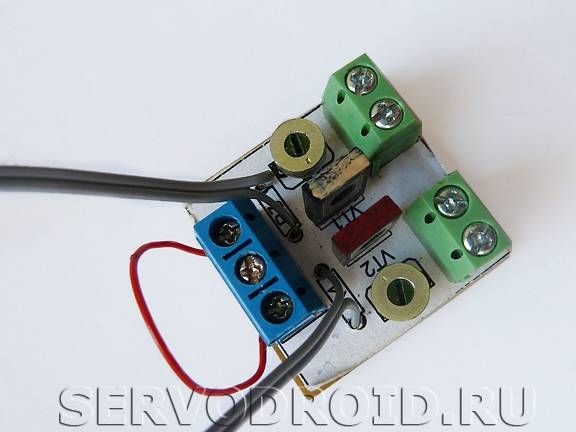
Üç bölümlü terminal bloğu XT1'in uç kısımları bir montaj teli ile bağlanmalıdır. Kontakların bağlantı noktaları iyi yalıtılmış olmalıdır; bir ısı büzüşmeli boru kullanmak en iyisidir.
Üçüncü Adım Dava nasıl oluşturulur?
Gövdenin çizimi normal bir A4 kağıda basılmalıdır. Daha sonra, bir parça oluklu mukavva almanız ve üzerine bir çizim yapıştırmanız gerekir, daha sonra kasanın çevresi kesilmelidir.
"Makas" piktogramının kalın çizgiler boyunca bulunduğu yerlerde kesikler yapılmalıdır. Daha sonra, siyah noktalı çizgiler boyunca, kartonu fotoğraftaki gibi bükmeniz ve siyah okları koymanız gerekir.



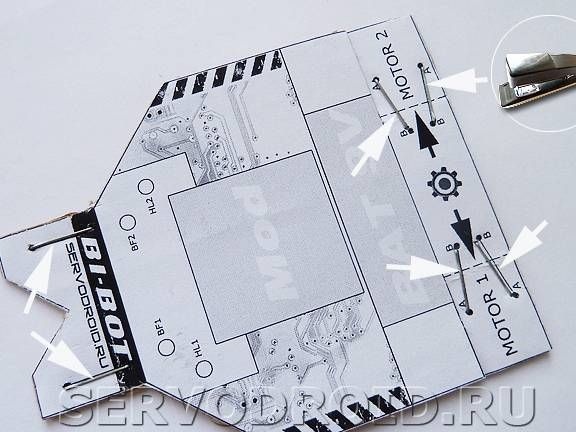


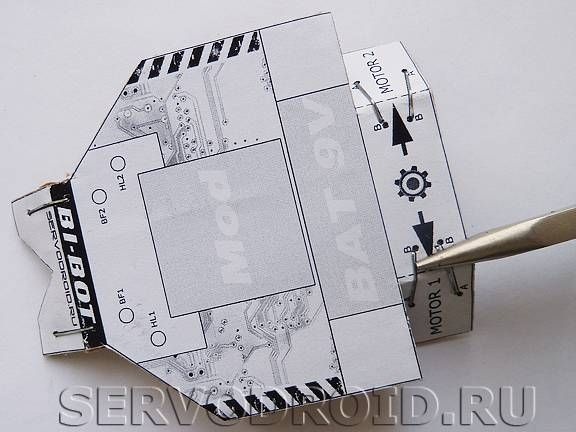
Bir zımba kullanarak muhafazanın ön ve arkasını belirtilen konuma, braketleri takmanız gerekir. Kurulum yerleri daireli siyah çizgilerle işaretlenmiştir. Çerçeveyi daha sert hale getirmek için zımba gereklidir. Braketleri taktıktan sonra, katlama çizgileri boyunca bükülme sıkıcıdır.
BF1, BF2 olarak işaretlenmiş yerlerde, fototransistörlerin montajı için delikler açmanız gerekir. HL1, HL2 yerlerinde, kızılötesi LED'lerin gövdesinin çapına uyacak kadar büyüklükte delikler açmanız gerekir.
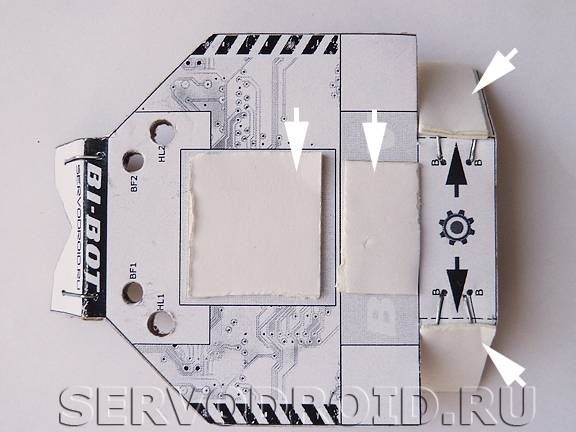
Mod "," BAT 9V "ve" MOTOR 1 "," MOTOR 2 "olarak belirtilen yerlerde, çift taraflı bant şeritlerini yapıştırın.
Dördüncü Adım Motorların montajı
Motorlar naylon bağlarla yerine monte edilir. Şaftların kaymasını önlemek için, koruyucularla takılmalıdır. Kalemlerin helyum çubuklarında bulunan lastik bantlardan yapılırlar. Aynı aşamada, telleri motorlara lehimleyin.


Beşinci Adım Kızılötesi LED'lerin montajı
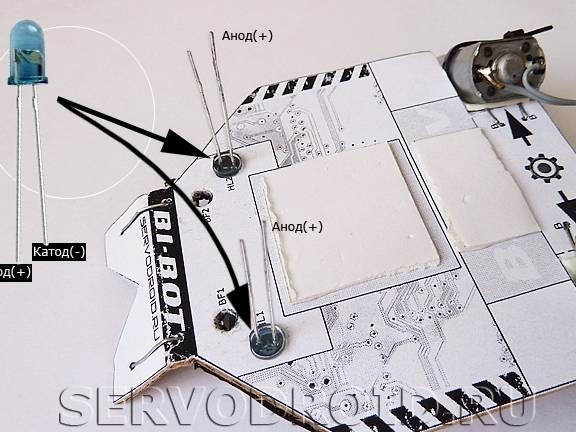
Kızılötesi LED'leri kurarken, sonuçlarını karıştırmamak önemlidir, içe aktarılan elemanlar için uzun bir temas bir anod, yani bir artıdır. LED'ler fotoğrafta gösterildiği gibi HL1, HL2 konumlarına monte edilir. Bulgular bükülür, böylece diyotlar paralel olarak bağlanabilir.
LED'lerin pozitif kontağına 430 ohm'luk bir direnç ve negatif kontağa siyah bir kablo lehimlenmelidir.
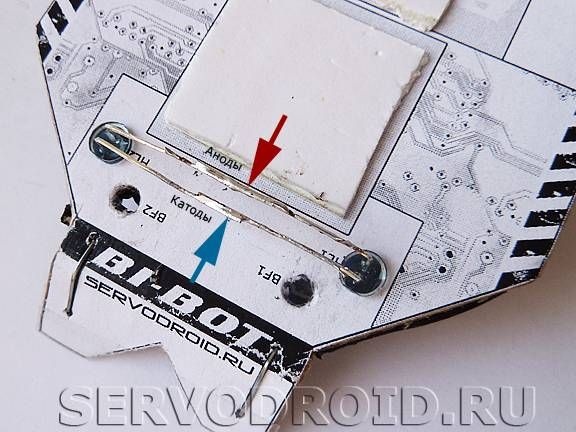
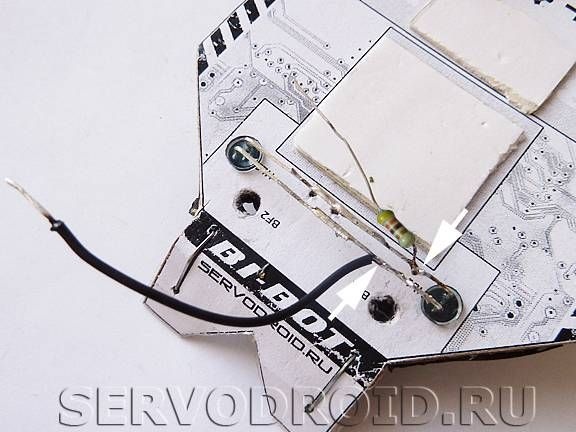
Siyah kablonun diğer ucu, üç bölümlü terminal bloğunun orta pimine bağlanmalıdır. Direnç çıkışına gelince, terminal bloğunun terminaline bağlanır.
Altıncı Adım Son inşa aşaması
Robotun hat boyunca hareket etmesi için, fototransistörler fotoğraftaki gibi BF1, BF2 yerine konur.
Işık kaynağının arkasındaki hareket için transistörler arka tarafa yerleştirilir.
Sonuç olarak, motorlar bağlanır ve pil takılır.


Hepsi bu, robot hazır. Şimdi etkinleştirmeyi ve gerekli koşullar altında yapılandırmayı deneyebilirsiniz.