

Pultoidlere uzaktan kumanda kullanılarak uzaktan kontrol edilebilen robotlar denir. Örneğin, bir TV uzaktan kumandası bu amaçlar için kullanılabilir. Yazarın böyle bir robotun imalatında belirlediği ana görev, montajının basitliğidir. incelenen robot baskılı devre kartının imalatını gerektirmez, kurulum çok basittir ve sadece kartonda gerçekleşir.

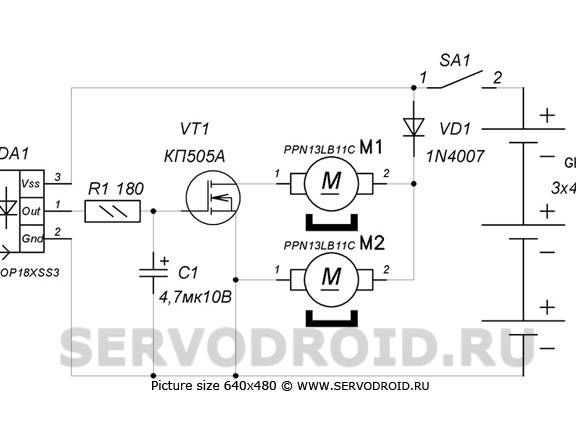
elektronik Robot devresi sadece dört bileşenden oluşur: bir diyot, bir transistör, bir fotodetektör ve bir kondansatör. Mekanik parçanın imalatı için, minimum malzeme de gerekli olacaktır, örneğin kasayı yapmak için bir CD-ROM kullanılır.
Bu şekilde yapılan bir robot sadece bir takımı anlayacaktır. Kontrol panelindeki herhangi bir düğmeye basmaya değer ve robot dönmeye başlayacak. Düğmeyi basılı tutmaya devam ederseniz dönüş açısı büyür, sonuç olarak robot 360 derece dönebilir.
Robot cihazı
Robotun üretimi için temel olarak bir kompakt disk kullanılır. Güç elemanlarına gelince, M2 cıvataları ile bağlanırlar. Elektronik kart, ayrıca pil bölmesi, bant kullanılarak takılır.
Şimdi motorlar hakkında, bir açıda bulunurlar ve şaftları yola karşı durur. Bu nedenle, tekerleklerin ayrı ayrı üretilmesine gerek yoktur. Cıvatalar, bir okul hattından yapılmış çerçeveler kullanılarak sabitlenir.
Üç “küçük parmak” pili robotu besler, özel bir kutuya takılırlar. Toplamda, güç kaynağı 4,5 V üretir.
Ve son olarak, fotodetektör, burada sadece bir tane, TSOP tipi. Robotun kontrol edilebilmesi sayesinde herhangi bir uzaktan kumandadan modüle edilmiş sinyaller alır.
Üretim için malzeme ve araçlar:
- naylon bağları;
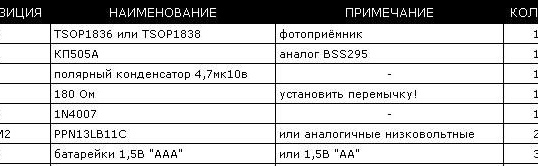
- fotodetektör tipi TSOP1836;
- bir alan etkili transistör (KP505A);
- kompakt bir disk;
- üç bölümdeki piller için fular;
- üç "küçük" pil;
- plastik cetvel;
- çerçeveyi takmak için vidalar;
- teller ve anahtar (çapraz tip).
Üretim süreci:
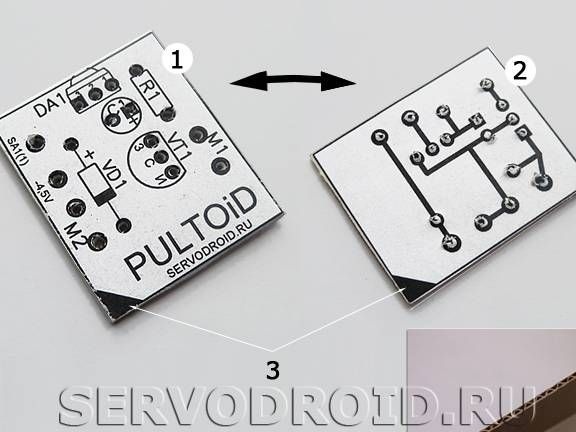
İlk adım. PCB tasarımı
Basılı bir devre kartı yapmak için, önce bir çizimi kağıda yazdırmanız gerekir. Bir kurulum çiziminde ve tahtanın diğer tarafında iki resim çekmelisiniz. Toplamda, tahta üç unsurdan oluşacak, merkezde her iki tarafa ofis kağıdı ile yapıştırılmış oluklu mukavva olacak. Tahtayı yapıştırmak için kuru bir tutkal çubuğu kullanılması önerilir.
İkinci Adım Radyo bileşenlerinin montajı
Elektronik bileşenleri monte ederken, kontakların çıkıntılı kenarlarını unutmamak veya kesmemek önemlidir. Daha sonra bükülecekler ve böylece bir elektrik devresi oluşturulacak. Tüm elemanlar, belirtilen şemaya göre lehimleme ile bağlanır.
Devredeki R1 direnci herhangi bir atlama teli ile değiştirilmelidir. Fotodetektör için, fotoğrafta doğru bağlantı sırası da gösterilir.

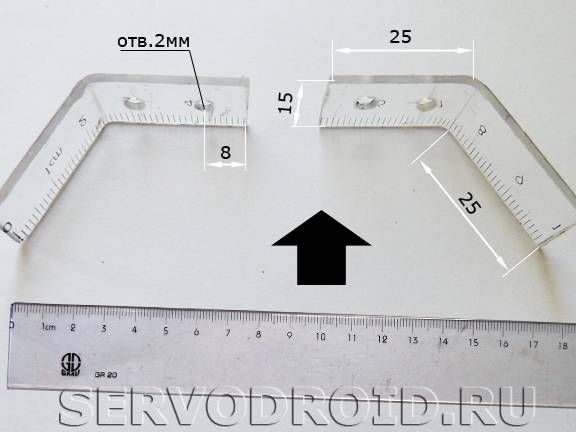
Üçüncü Adım Güç Çerçevesi Kurulumu
Motorları monte etmek için bir güç çerçevesi oluşturmanız gerekir. Materyal olarak burada bir plastik okul yöneticisi kullanılacaktır. İki parçaya kesilmeli ve fotoğrafta gösterildiği gibi bükülmelidir. Cetvelin bükülmeye başlaması için, sıcak havya ucunu yaklaşık 2 mm mesafede bir sapma yerine getirmeniz gerekir. Ayrıca bu amaçlar için bir inşaat saç kurutma makinesi kullanabilirsiniz. Cetvelin yaklaşık 30 derecelik bir açıyla düzgün bir şekilde bükülmesi gerekir.

Çerçeve oluşturulduktan sonra kurulumuna devam edebilirsiniz. Bunu yapmak için, CD ve 2 mm vidaları somunlarla alın. Ayrıca, en az iki milimetre çapında delikler doğru yerlere delinir ve çerçeve vidalarla sabitlenir. Çerçevenin kaymaması için, takmadan önce diske çift taraflı bant yapıştırmanız gerekir.
Dördüncü Adım Ön desteğin takılması
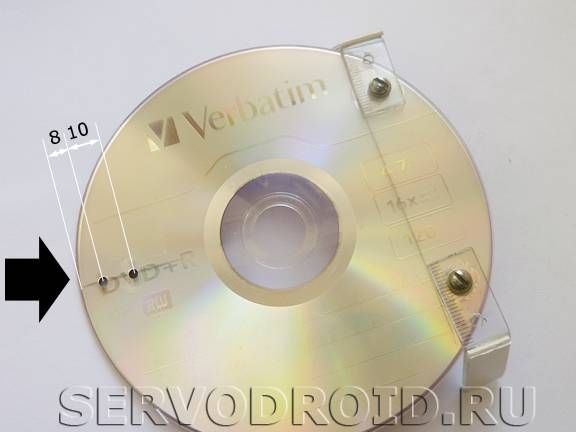
Diskin önünde iki delik açmanız ve bir naylon şap hazırlamanız gerekir. Şap boyutu 3x150mm olmalıdır. Fotoğrafta gösterildiği gibi takılmalıdır. Sonuç olarak, ortaya çıkan destek robotun çalışması sırasında mükemmel şekilde değer kaybedecek ve yol boyunca kayar.


Beşinci Adım Motor kurulumu
Motor millerinin yol boyunca kaymasını önlemek için üzerlerine koruyucular konulmalıdır. Helyum kalemlerinin macunlarında bulunan sakızdan yapılırlar. Motorları takmak için, önce desteğe bir çift taraflı bant yapıştırmanız gerekir, kaymayı önler. Peki, o zaman motorlar sonunda naylon bağlarla sabitlenir.

Altıncı Adım Anahtar ve güç kaynağı bağlantısı
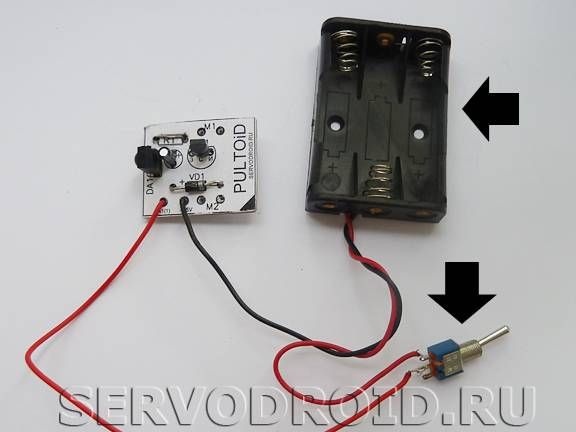
Bir güç kaynağı olarak, akımı 5 volt'u aşmayan herhangi bir pili kullanabilirsiniz. Bu durumda, toplam 4,5 V'luk üç parmak pili için bir kılıf kullanılır.
Düğmeye gelince, güç kaynağından gelen pozitif temas boşluğuna monte edilir. Kırmızı kablo SA1 pimini (1) ve siyah kablo pimini -4.5V'ye bağlar.


Ayrıca bu aşamada, motorları bağlayabilirsiniz, kabloları M1 ve M2 kontaklarına bağlanır.
Yedinci adım. Son aşama
Son aşamada, tüm elektronik elemanların sabitlenmesi gerekir. Diske çift taraflı bant kullanılarak tutturulurlar. Düğmeye gelince, aynı zamanda sabitlenmesi gerekir, bunun için sıcak tutkal kullanabilirsiniz.

Hepsi bu, şimdi robot hazır. Herhangi bir uzaktan kumandayı kullanarak açmayı deneyebilir ve komut verebilirsiniz.