

böyle bir robot zaten oluşturuldu ve buna DIY: LightBot deniyor. Dahası, herkes toplayabilir, yaratılış için tüm unsurlar kolayca bulunabilir ve robot oldukça basit bir şekilde monte edilecektir. Bu tür bir robot sürekli olarak karanlıkta sahibinin peşine düşecek ve doğru yerde vurgulayacaktır, bu da el fenerini elinde tutma ihtiyacını ortadan kaldırır. Robot, sahibinin ayağına takılan kızılötesi sensör sayesinde sahibi tarafından izlenecektir.
Robot oluşturmak için malzemeler ve araçlar:
1. Kızılötesi işaret. Böyle bir cihaz dört kızılötesi LED'den oluşacaktır, TV'den uzaktan kumandada bulunabilirler.
2. Bir dizi K'nex veya çocuk oyuncağından iki tekerlek.
3. İki küçük motor (çocuk oyuncakları bulunabilir).
4. NPN veya fotodirenç gibi iki kızılötesi transistör. Kızılötesi fototransistörlerin satın alınması zor değildir.
5. Üç adet AA pil ve bir adet 9 Volt.
6. PVC boru.
7. Sıcakta eriyen yapıştırıcı.
8. Tek kullanımlık plastik çatal.
Robotun üretim süreci:
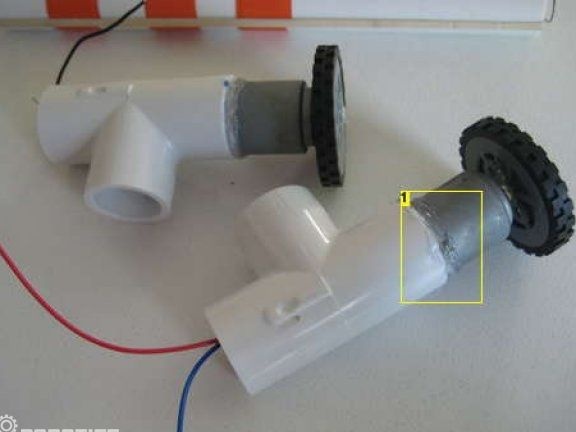
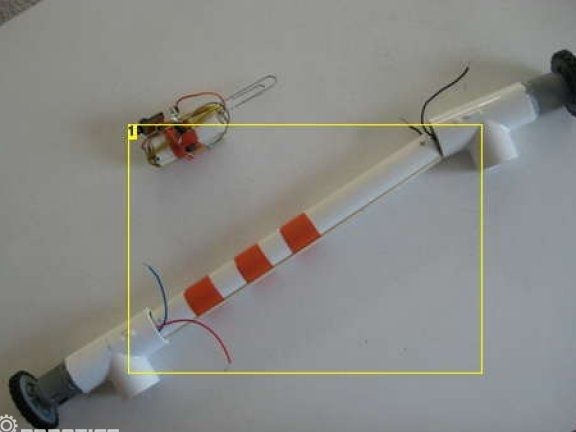
İlk adım. Motor kurulumu
İlk önce motorları kurmanız gerekir. Montajları için daha sonra ana tüpe konulan plastik “tees” kullanılır. Motorlar sıcakta eriyen yapıştırıcı ile sabitlenir. Buradaki yapıştırıcı için üzülmek gerekli değildir. Ayrıca bu aşamada, tekerlekler motorların eksenine yerleştirilebilir. Sıkıca tutmaları için sıcak eriyik yapıştırıcı ile sabitlenebilirler.
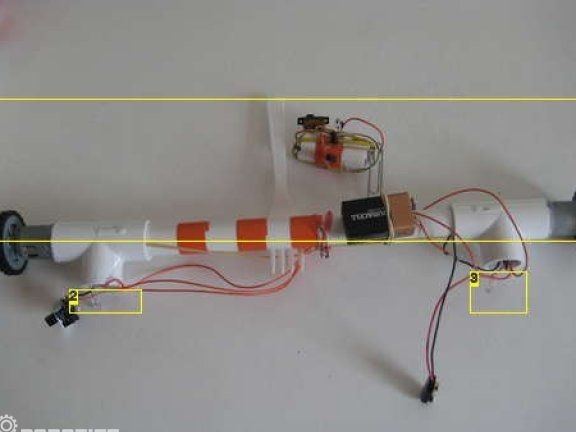
İkinci Adım Fotodirençlerin Takılması
Kızılötesi işaret ışığını izlemek için fotodirençlere ihtiyaç vardır. Bir tür robot gözü olacaklar. Işığın çıkacağı yöne bağlı olarak robot, motorlardan birini doğru yönde dönmeye hızlandıracaktır.
Işık dirençleri 2 ve 3 sayıları ile belirtilen yerlere "tees" e bağlanır. Bu konumlarda üç çubuklu bir yapıştırıcı ile sabitlenebilirler.
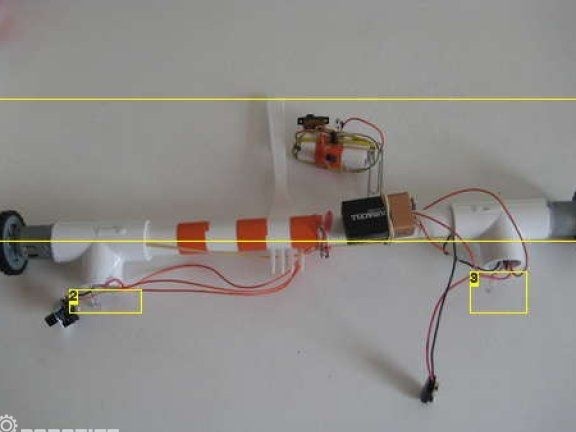
Üçüncü Adım Güç Kaynağı Kurulumu
Toplamda, robot iki güç kaynağı üzerinde çalışır. Bunlar üç adet AA pil ve bir adet 9 Volt pil. Parmak pillerine gelince, tüpün içine monte edilirler.Ahizeye dışarıdan “Krona” tipi bir pil takılmış.
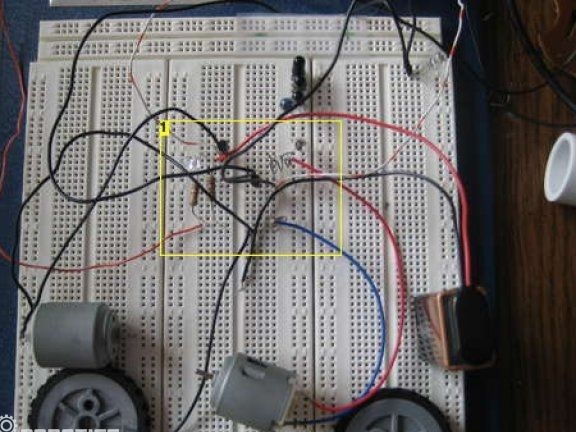
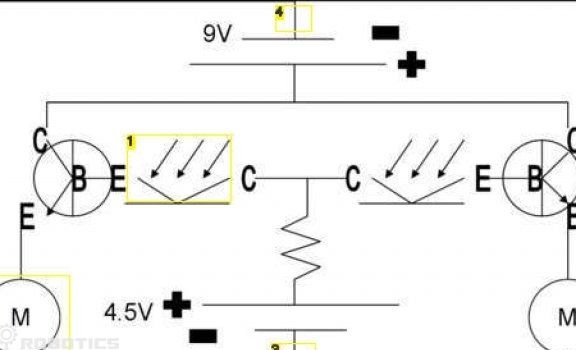
Dördüncü Adım Robot devresi
Şema, robot bir tarafta radyasyon görürse, motoru karşı taraftan hızlandıracak, böylece robot dönecek şekilde tasarlanmıştır. İstenen motor devri, deneysel olarak dirençlerin değiştirilmesiyle elde edilir.
Başka bir devre bir anahtarla desteklenebilir. Robotun güç beslemesini kesecek şekilde kurulmalıdır.
Şemada, 1 sayısı bir fototransistörü, 2 - motor kontrolörü, 3 - bir anahtarın takıldığı bir yeri, 4 - buraya da bir anahtar koyabilirsiniz.
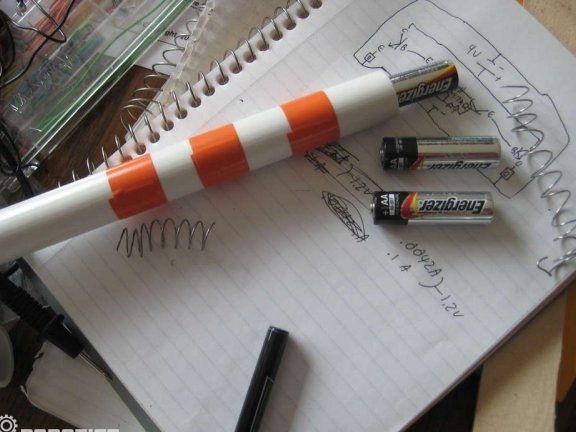
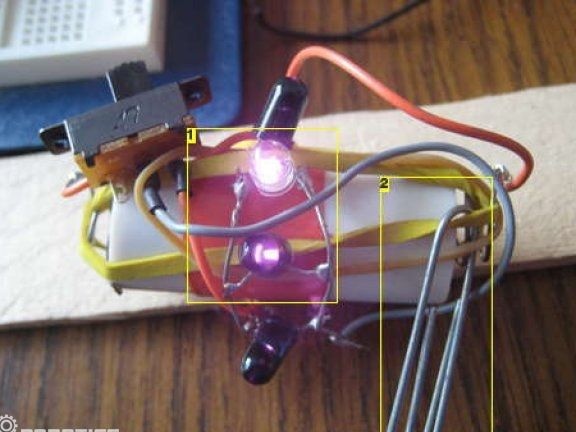
Beşinci Adım IR İşaretçisi Oluşturma
Kızılötesi bir işaret oluşturmak için, içine bir AA pilin takıldığı kısa bir polivinil klorür tüpü alınır. Elastik bir bant sayesinde kontaklar tutulur ve dört kızılötesi diyotun güç kaynağı bir anahtar tarafından kontrol edilir. Dijital bir kameradan bakılması gereken diyotların çalışabilirliğini kontrol etmek için gözle böyle bir ışık görmek imkansızdır. İşaret, bacağa sıradan bir ataş ile sabitlenir.
Altıncı Adım Robot montajının son aşaması
Şimdi her şeyin şemada gösterildiği gibi bağlanması gerekiyor. Mekanik parçanın da monte edilmesi gerekir, en çok fotoresistörlere dikkat edilmelidir, dışarı çıkmalıdırlar, çünkü aksi takdirde işaretin sinyalini alamazlar. Şimdi, robotu açtığınızda, etrafta dolaşmanız ve ne yapacağını görmeniz gerekiyor.
Tabii ki, robot ilk kez sahibin peşinden gitmeyebilir, ancak umutsuzluğa düşmemelisiniz, çünkü devre değiştirilebilir ve robot gerektiği gibi yapılandırılabilir. Yazara göre, gelecekte yazılım, nesneleri ve insanları tanıyacağı için robot üzerine kurulabilir. Ayrıca birçok farklı sensör takabilir ve bu robotu ileri teknoloji bir cihaz yapabilirsiniz.