

Vibrobotlar böyledir robotlartitreşimlerden dolayı hareket eder. Tasarımlarının oldukça basit olmasına rağmen, teknik olarak daha sofistike kardeşlerinden daha az etkileyici değildirler. Böyle bir robot kılları taşıyıcı olarak kullanacak, bu bir çeşit bacağı.
Makalede açıklanan robot, hareketin yörüngesini bağımsız olarak değiştirebilir ve kendi başına engelleri tavaf eder. Bir deneme olarak, yazar farklı enerji kaynaklarının ve motorların monte edildiği iki robot yarattı. Prensip olarak, kullanılan malzemelerle ilgili katı standartlar yoktur, ana şey robotu monte ederken verilen şemaya uymaktır.

Üretim için malzeme ve araçlar:
- 3x150mm boyutunda naylon bağlar;
- siyah renkli yalıtım bandı;
- 9 Volt pil (6F22);
- lazer disk (CD veya DVD fark yok);
- koruyucu bir muhafaza;
- 9 volt pil konektörü;
- eksantrik (silme).

Robotun üretim süreci:
İlk adım. Robotun temelini oluşturun
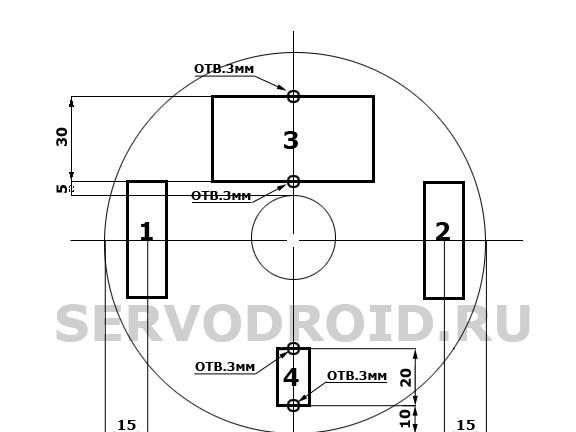
Robot için temel olarak, normal bir CD veya DVD diski kullanılacaktır. Fotoğrafta sunulan şemaya göre açıkça delikler açın. İstisnasız, tüm delikler 3 mm'lik bir matkapla delinir. Naylon çapları bağlamak için kullanıldığında bu çap yeterlidir. Farklı bir sabitleme yöntemi kullanmaya karar verirseniz, delikler başka herhangi bir boyutta delinebilir. Önerilen çizim, robotun herhangi bir montajı için uygundur.
1 ve 2 sayıları fırçaların kurulum yerlerini gösterir, 3 numaralı kareye bir pil takılır ve 4 karesine bir motor monte edilir.
İkinci Adım Movers yapıyor ve kuruyoruz
Tahrik sayesinde robot hareket edecektir. Onları yapmak için iki diş fırçası almanız gerekir. Fırçaların kıl yüksekliği ve şekli bakımından aynı olması en iyisidir. Şekil farklıysa, makasla düzeltilebilir.
Şimdi kılların yönünü ayarlaması gerekiyor. Bunun için yapışkan bant alınır ve kıllar fotoğrafta gösterildiği gibi sarılır. Bu konumda, fırça yaklaşık bir saat boyunca tutulmalıdır, böylece kıllar bu pozisyonu hatırlar. Fotoğrafta, gri ok kılların eğildiği yönü gösterir.

İstenen şekil ayarlandıktan sonra, diş fırçasındaki kıllarla parçayı kesmeniz gerekir. Ardından tutkal tabancasını almanız ve kılları belirtilen yerlere diske takmanız gerekir. Sıcak tutkal hızla soğuduğu ve sertleştiği için tüm işler hızlı ve doğru bir şekilde yapılmalıdır.Fırçaları birbirine paralel duracak şekilde kurmaya çalışmanız gerekir.
Fırçaların kılları, diğer bir deyişle, 9 voltta aküye doğru bakmalıdır. Çalışma sırasında, robot kılların yönüne karşı hareket edecektir, yani pil konumu robotun arkası olacaktır.

1 - disk, 2 - sıcakta eriyen yapıştırıcı, motoru takmak için 3 delik, aküyü takmak için 4 delik. Beyaz oklar kılların yönünü gösterir.
Üçüncü Adım Eksantrik yapmak
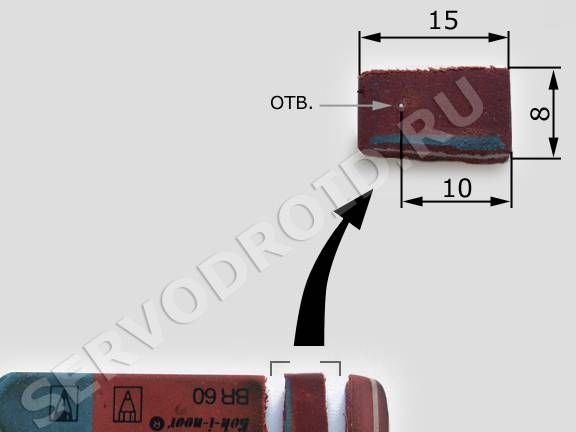
Titreşim elde etmek için, motor şaftına eksantrik, yani dengesiz bir nesne takılmalıdır. Yazar uygun büyüklükte bir parçayı keserek silginin eksantrik yapmasını sağladı. Beyaz okla gösterilen yerde bir delik açın. Eksantrik motor şaftından kayacağı için büyük olmamalıdır. Bir iğne ile yapılabilir.
Dördüncü Adım Koruyucu bir örtü üretimi.
Robotun çalışması için dönen silgi tarafından titreşim oluştuğu için, bu yerin çeşitli nesnelerden korunması tavsiye edilir. Ek olarak, bu tür koruma, robota daha ilginç bir görünüm verecektir. Koruyucu kapak birkaç katmandan oluşan kağıttan yapılmıştır. Bir silindir kağıttan yapılmış olmalıdır; boyutu motorun boyutuna bağlıdır. Kağıda daha fazla sertlik kazandırmak için tutkal ile bulaşabilir ve bu nedenle birkaç kat daha uygulanabilir. Veya bu amaçlar için karton kullanabilirsiniz.
Silindirik bir şekil oluşturmak için motor basitçe üstte kağıtla sarılır.




Beşinci Adım Robotun son montajı
Motor belirli bir yere monte edilir ve daha sonra naylon bir şapla sabitlenir. Bu tür şaplar, yapı malzemelerinin satışı konusunda uzmanlaşmış mağazalardan satın alınabilir.
Pil de tam olarak takılmıştır. Bataryanın açıkça ortalanması gerektiğini düşünmek önemlidir, aksi takdirde robotun yörüngesi değişebilir. Bu arada, gelecekte bu şekilde hareketin yörüngesini ayarlamak mümkündür ev yapımı.


Şimdi klips konnektörü ve motor arasında küçük bir anahtar takmanız gerekiyor. Sonuç olarak, klips konnektörünü bataryaya bağlamak kalır ve robotu test etmeye başlayabilirsiniz. Teller renkle bağlanır.
Ancak, bir Kron pili kullanırken, bir anahtar takmanız gerekmez; konektörü bağlayarak robotu açabilirsiniz.
Robotun ikinci sürümü için, pili cihazdan kolayca çıkarabilirsiniz, ancak elbette anahtar daha umut vericidir.
Hepsi bu, robot hazır, test etmeye başlayabilirsiniz. İstenen sonucu elde etmek için, polariteyi değiştirmeyi deneyebilirsiniz, böylece motor ters yönde döner ve robot farklı davranır.