


İlk olarak, octocopter ve quadcopter arasındaki farkı anlayalım. İsme ek olarak, bu aynı zamanda raylardaki motor sayısıdır. yani Quadrocopter - dört motor, sekizli - sekiz. Bu altıgen için de geçerlidir - altı, tricopter - üç, vb. Örneğin, kılavuzlar dört (X) ve sekiz motorsa, bu hala bir octocopter, ancak X8 olarak adlandırılır. yani dört rayda, sekiz motorda.
Temel olarak, helikopterler için ön ekli sayılar, operatörün yerden radyo sinyali tarafından kontrol edilen uçaklardır. Hindistan'dan bir öğrenci daha ileri gitmeye ve bir kişiyi havaya kaldırabilecek bir octocopter yapmaya karar verdi. Bu ucuz bir proje değil. Finansman eğitim kurumu tarafından devralındı.
Araçlar ve malzemeler:
- Motorlar Turnigy CA170 Motorlar - 8 adet;
- Kontrolör Turnigy Fatboy 300A - 4 adet;
- Turnigy 200A HV kontrol cihazı - 4 adet;
- Verici Hitech XG11 Tx / Rx;
-Flight DJI A3 Pro denetleyici;
-Uçuş denetleyici DJI Naza M V2;
- Pil Zippy 22.2V 5Ah 40C LiPo - 16 adet;
- Şarj Cihazı 6s LiPo Şarj Cihazı;
-XT150 konektörler - 50 adet;
-Tel 8AWG Sillicone Tel - 10 metre;
-Servoprivody;
Squash oynamak için top (Squash Balls) - 4 adet;
- MDF sayfası 25cm x 50cm x 2mm;
-Drel;
- Taşlama makinesi;
- Tornavidalar;
- Anahtarlar;
- Pense;
-Lazer kesici veya şerit testere;
-4mm, 6mm ve 8mm somun çeşitleri, cıvata ve rondelalar;
-Gorelka;
-LED LED;
Lehimleme aksesuarları;
- 2 ve 3 mm çelik tel;
-Telrep vida 100mm-200mm - 40 adet;
- 40 kanca ve göz cıvatası;
Takometre Turnigy RPM;
-Güç Analizörü (Turnigy Wattmeter / Ampmeter);
-Pil denetleyici;
- Alüminyum profil boruları;
-Alüminyum plaka;
- Çift taraflı bant;
-Kaynak makinesi;
-Ruletka;
-Fusion 360 ile bilgisayar;
- Akü 11.1 V 2200 mAh LiPo 30C;
Yoğun kumaş 1.2m x 1.2m;
- Güçlü iplik ve iğne;
-Kaynak güvenliği;
Birinci Adım: Tasarım
İnsanlı bir oktocopter geliştirirken, usta çeşitli konfigürasyon seçeneklerini, X8 ve H ve T'yi düşündü, ancak geleneksel şemaya göre en uygun olanın, çeşitli nedenlerden ötürü, oktocopter tasarımı olacağı sonucuna vardı.
Sonra oktocopterin büyüklüğünün ne olması gerektiğini bulmak gerekiyordu. Hesaplamalar Fusion 360 üzerindeki CAD modelleri kullanılarak yapılmış ve mevcut vidalar hesaplamalarda dikkate alınmıştır. Optimum üç metrelik bir çap, bir metrelik bir yükseklik olduğu ortaya çıktı. Bir kişi için iç sepet 55x55 cm.

İkinci Adım: Alışveriş Sepeti
Çerçeve, 50 mm raf ve 2 mm et kalınlığına sahip bir alüminyum kare profilden kaynaklanmıştır.
Profil kesildi ve kaynak yapıldı. Dikişler temizlenir.



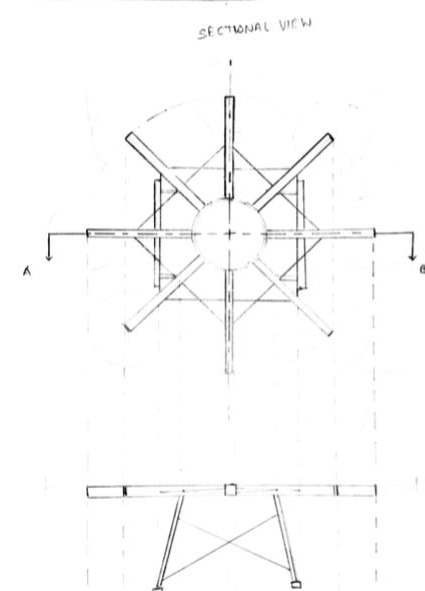
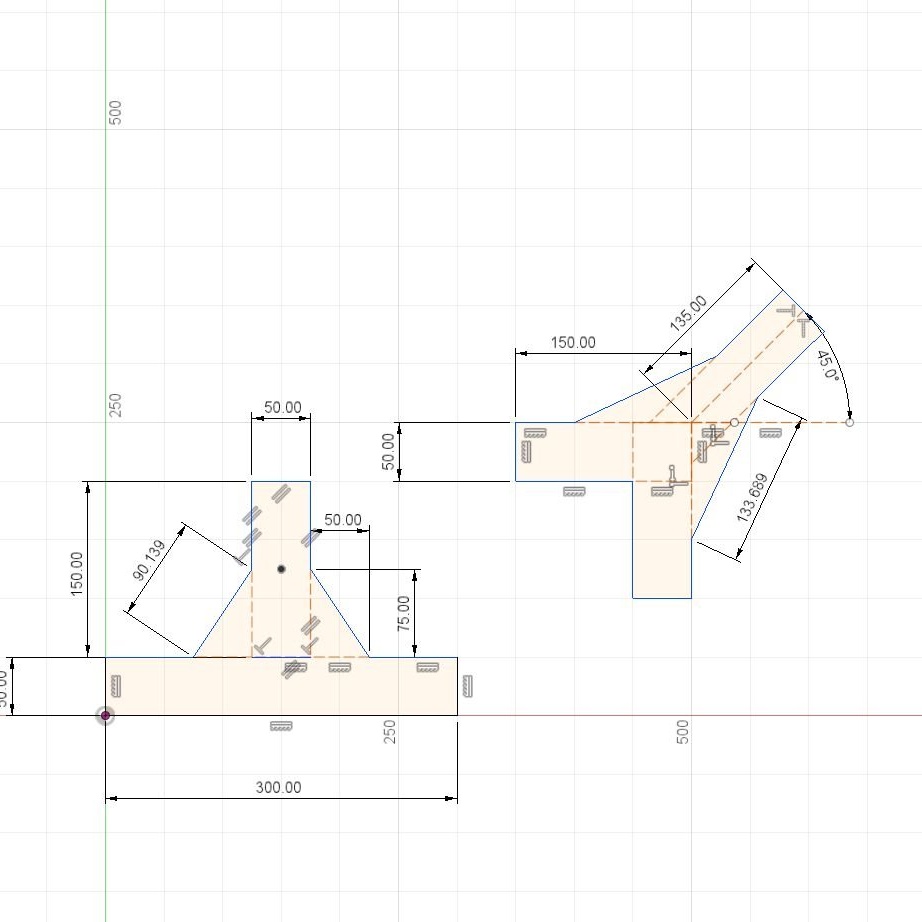
Üçüncü Adım: Montaj Plakaları
Parantez için ana, 1,5 mm'lik alüminyum plakalar kullandı. Toplamda sekiz köşeli, dört köşeli ve dört köşeli çerçevenin ortasında. Kol omzunun ve destek parçasının uzunluğu her biri 15 cm olup, braketler Fusion 360'ta tasarlanmıştır. Plakalar bir freze bıçağı ile kesilmiştir. İçlerine montaj delikleri açılır. Daha sonra braketler çerçeveye kaynaklandı.

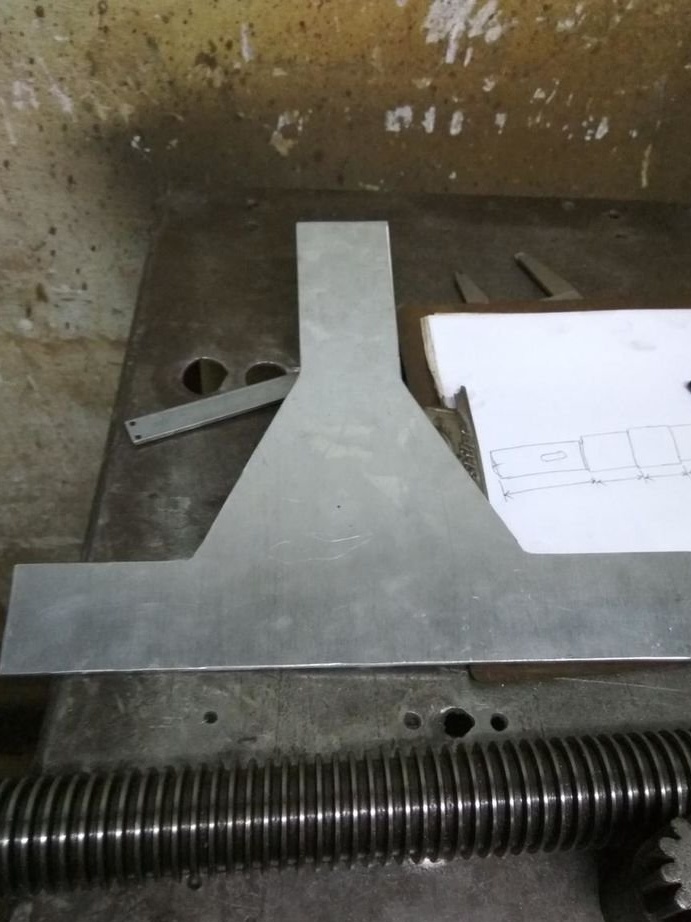





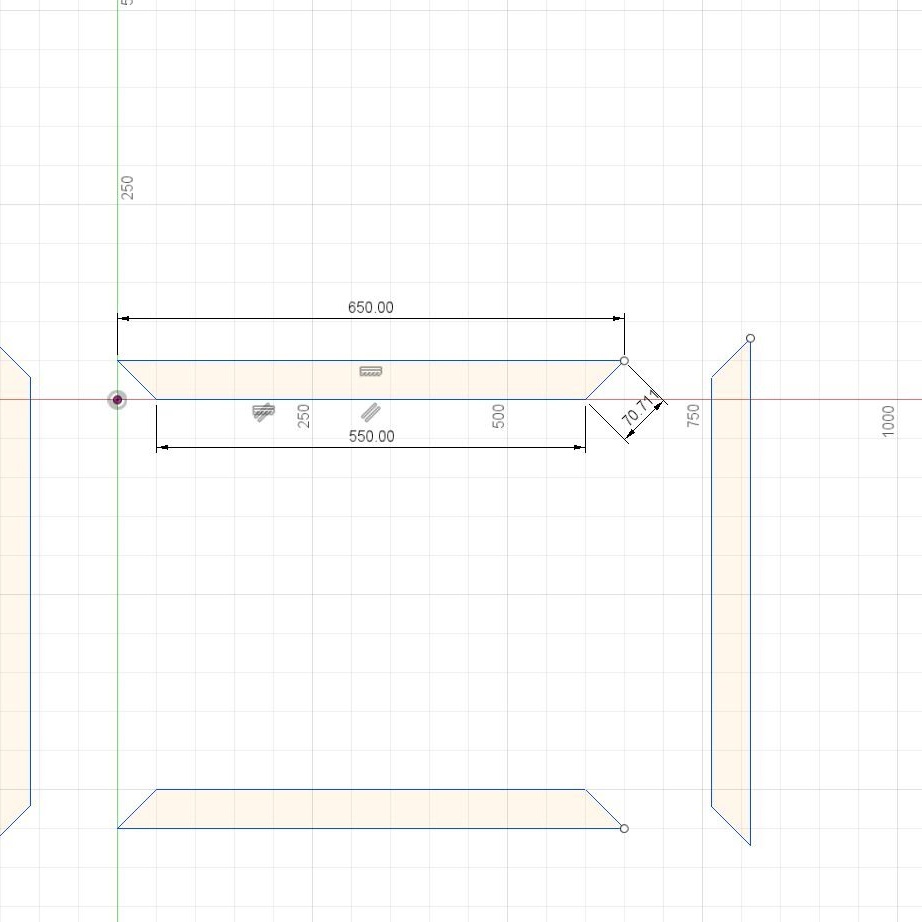
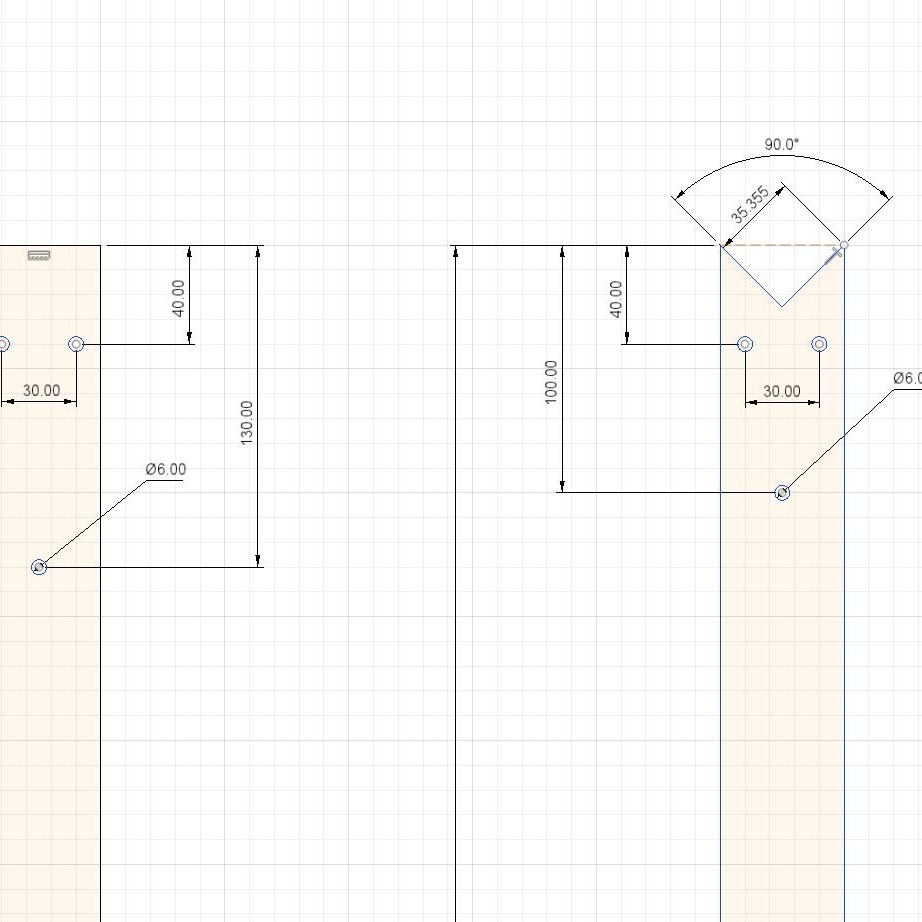
Dördüncü Adım: Operatör Profili
Bu profiller braketlere tutturulur ve motorlar uçlarına monte edilir. Profiller kare, 50 X 50 cm ve farklı uzunluklara sahiptir. Köşelere 112,5 cm uzunluğunda profiller, yanlarda profil 125 cm uzunluğunda profiller, 45 derecelik bir açıyla açılı profiller üzerinde bir kesme yapılır. Uç yüzünün açının düzlemine bitişik olması gerekir.
Profilleri braketlere sabitlemek için, master cıvatalar için delikler açar.




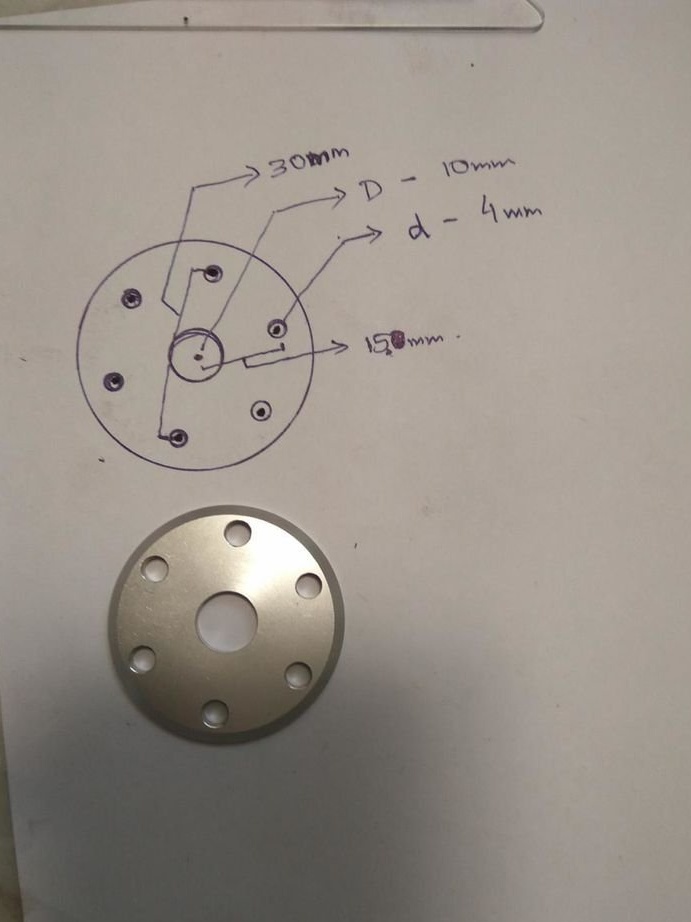
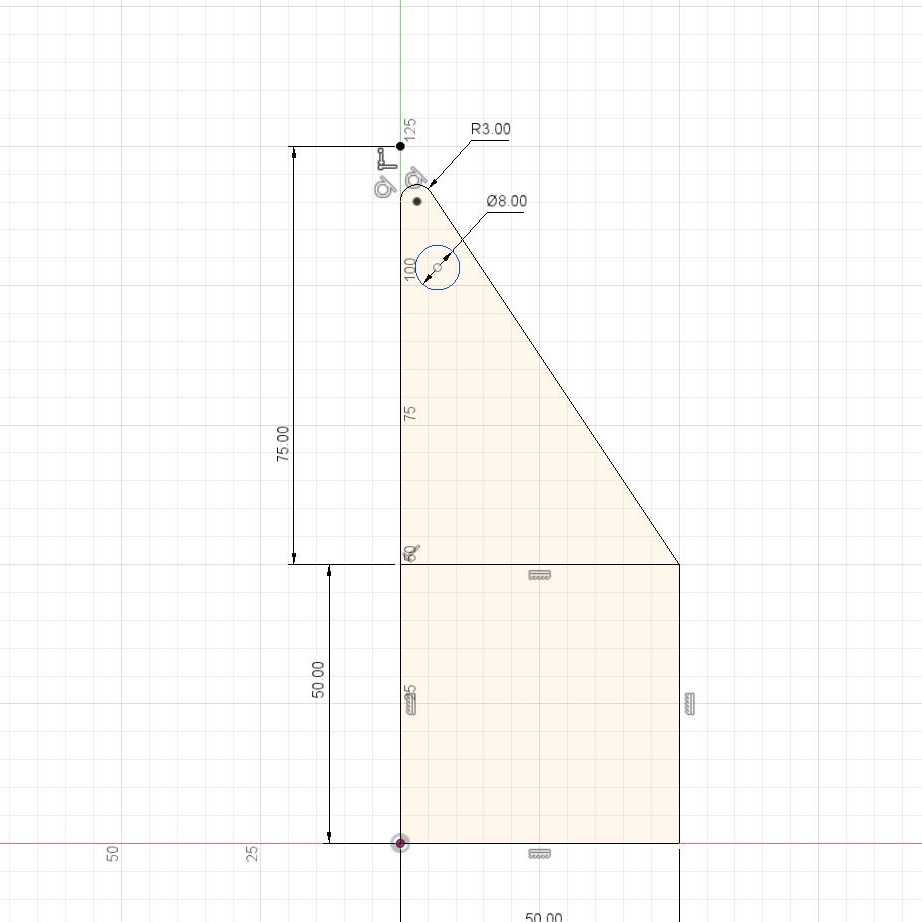
Beşinci Adım: Motor Takozu
Motorlar alüminyum kare bir plakaya vidalanır. Plakanın altından birbirine paralel olarak iki köşe vidalanır. Aralarındaki mesafe profilin genişliğine eşittir. Ayrıca, motorlu plaka profile monte edilir, montaj delikleri açılır ve her şey cıvatalarla bükülür.





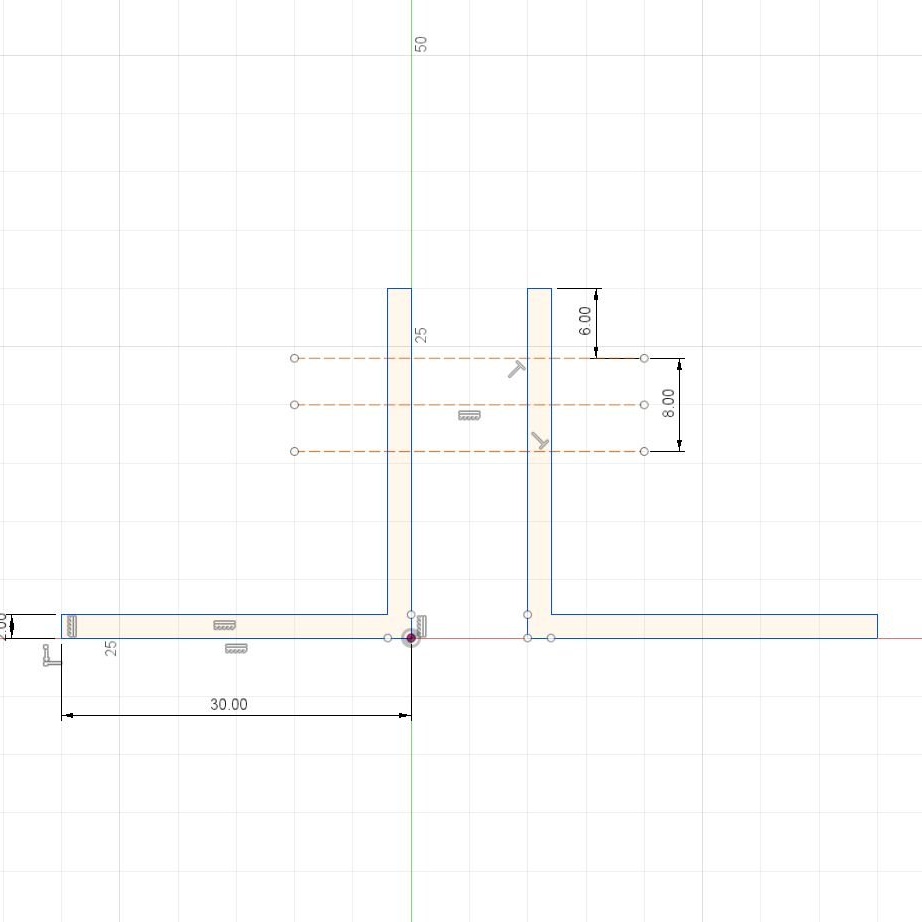
Altıncı Adım: Şasi
Şasi, 25 x 25 mm ve 3 mm kalınlığında alüminyum profillerden yapılmıştır. Tüm parçalar kaynaklanmış ve boyutları fotoğrafta görülebilir. Fikir şasiyi 30 derecelik bir açıyla sepetin dışına monte etmekti. Kasanın hasar görmesini önlemek için destek kabloları aralarından çekilir.


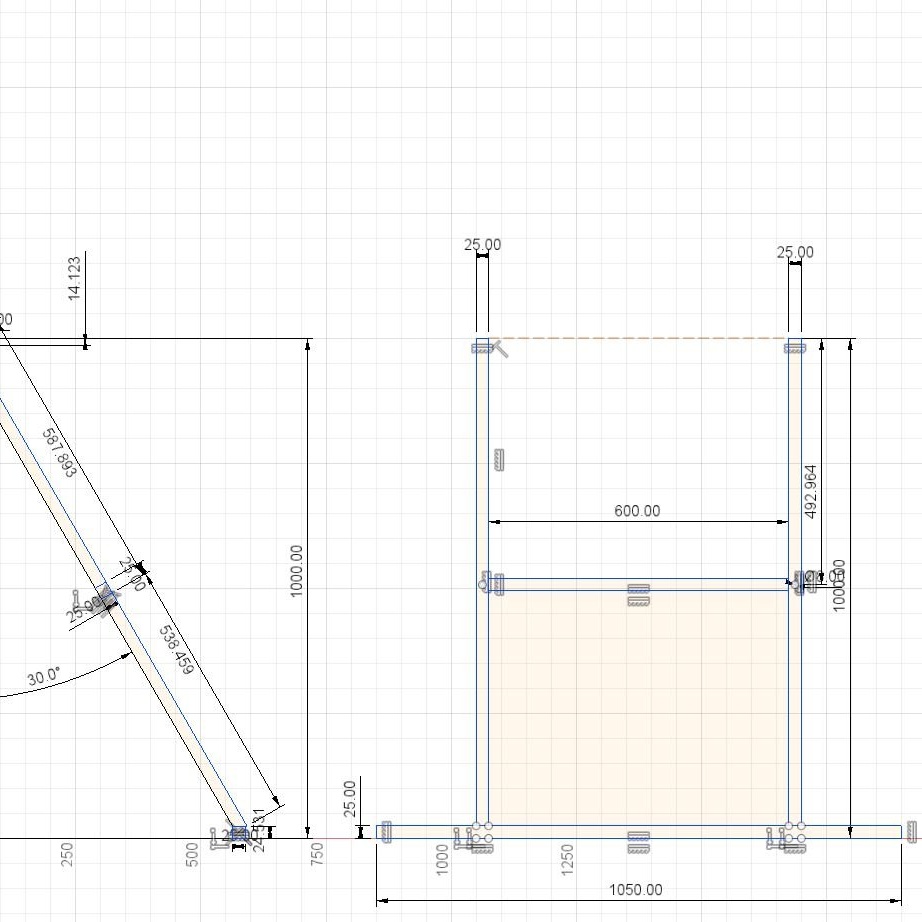
Yedinci Adım: Destek Profillerini Destekleme
Motorları monte ettikten sonra, destek profilleri bükülmeye başladı. Sonra usta motoru çalıştırmayı denedi ve profillerin "yürüdüğünü" öğrendi. Tasarımı güçlendirmek gerekiyordu.
Plaka eklemek yapıya çok fazla ağırlık katacaktır. Sonra usta sepetten aşağıya V şeklinde bir tasarım yapmaya karar verdi. Halatlar alt kısmına tutturulmuştur. Kabloların diğer uçları destek profillerinin ortasındaki braketlere tutturulmuştur. Kablolar bir vinç ile çekilir. Böylece yapı sertleşir.















Sekizinci Adım: Bağlanın
İlk olarak, master konektörleri tellerin uçlarına lehimler.


Ardından kurulumu başlatır. Her motorun dönüş yönü kontrol edilmelidir. Gerekirse, motorun dönüş yönünü ve buna göre, ESC'den motora gelen üç telden ikisini değiştirerek vidayı değiştirmek kolaydır. Tüm motorlar doğru şekilde bağlandıktan sonra, sihirbaz montajı üreticinin bağlantı şemasına göre yaptı.
Uçuş kontrolörleri IMU DJI A3, metallerden kaynaklanan parazitlere karşı çok hassastır ve master, parazit nedeniyle sistemi yapılandıramadı. Sonuç olarak, usta A3'ü benzer bir bağlantı şemasına sahip Naza M V2 ile değiştirdi. Naza M V2 çok güvenilir bir şekilde çalıştı.
Ardından sihirbaz pilleri bağlar. Her bir taşıyıcı profilinde iki adet 22,2 V pil seri olarak bağlanmıştır.



Dokuzuncu Adım: Pilot Koltuğu
Koltuk dayanıklı kumaştan dikilmiştir. Ayrıca, çerçeveye tutturulmuş bir emniyet kemeri ve bir kask ve bir kask takılmıştır.






Onuncu Adım: İlk Uçuş
Pilotun octocopter üzerindeki uçuşundan önce, bir kum torbası ve ardından bir insan modeli ile çeşitli testler yapıldı. Uçuş sırasında, kontrol kaybından bir rüzgar rüzgârına kadar çeşitli durumlar simüle edildi.
Tüm testlerden sonra pilot nihayet havaya uçtu.






Uçuştan önce, aşağıdaki işlemleri yapmalısınız.
Cıvataların, kabloların, motor montajının sıkılığını kontrol edin.
Kablolamayı kontrol edin.
Vidaların kolayca döndüğünden emin olun.
Tüm ESC'lerin kapalı olduğundan emin olun.
Tüm pillerin sıkıca takıldığından ve şarj edildiğinden emin olun.
Başlatma ve kalibrasyon için uçuş kontrolörüne güç bağlayın.
GPS'e bağlandıktan sonra, tam otomatik moda geçecektir (Alt. + Att. Hold).
Pilot koltuğuna oturun ve tokalayın.
Tüm pilleri ESC'ye bağlayın.
Kıvılcımı gidermek için iki pili seri olarak (ESC-RB-RB-ESC) bir direnç kullanarak bağlayın.
Anahtarı açık konuma getirerek motorları açın.
Octocopter'ı kontrol etmek için kontrol cihazını kullanın.