

İlk quadrocopter'inizi yapıyorsanız ve 3D yazıcınız yoksa, bu talimat tam size göre. Bu quadrocopter'i inşa ederken, usta yedi model yaptı ve her birinin kendine özgü önemli kusurları vardı. Sonunda, deneme yanılma yoluyla bunu çalıştırabildi model.
Araçlar ve malzemeler:
- 7 mm kalınlığında ve yaklaşık 30 x 22 cm boyutunda kontrplak;
- Alüminyum profil boru 25 * 25 mm - 1 metre;
-Izolenta;
-Krepezh;
-Latch iplik;
Lehimleme aksesuarları;



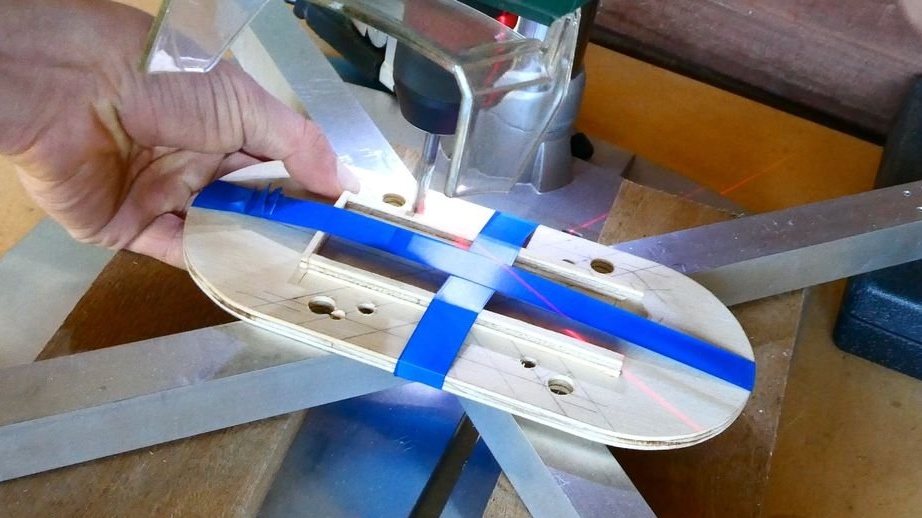
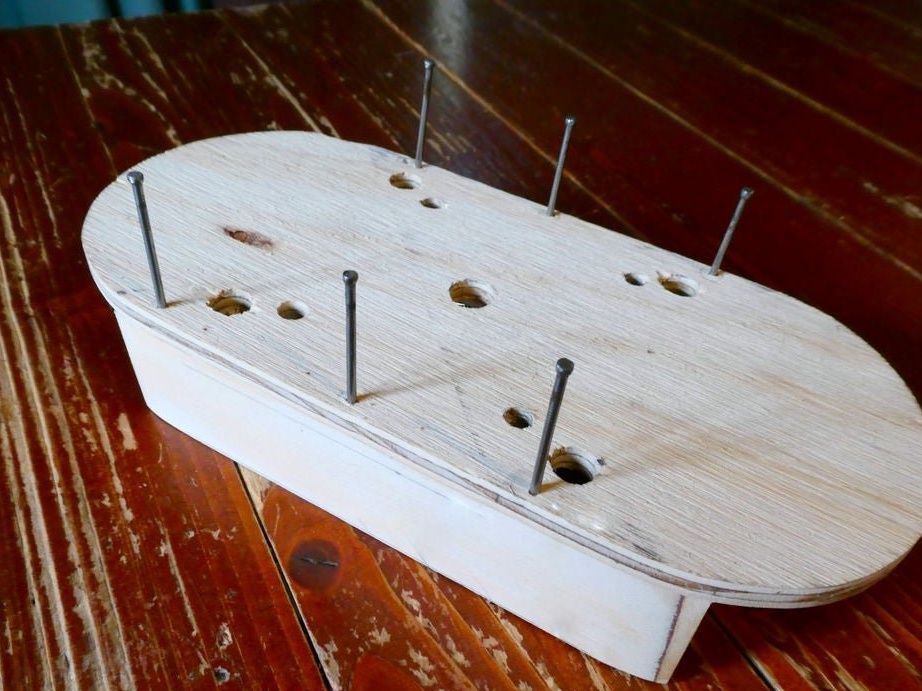
Birinci Adım: Dava
tip şablon ve kontrplak üzerine yapıştırın. Parçaları kesin ve tüm delikleri delin.
Pili tabana yerleştirin ve tabanı dengeleyin. Bataryayı özetleyin. Pilin üç tarafındaki şeritleri yapıştırın.





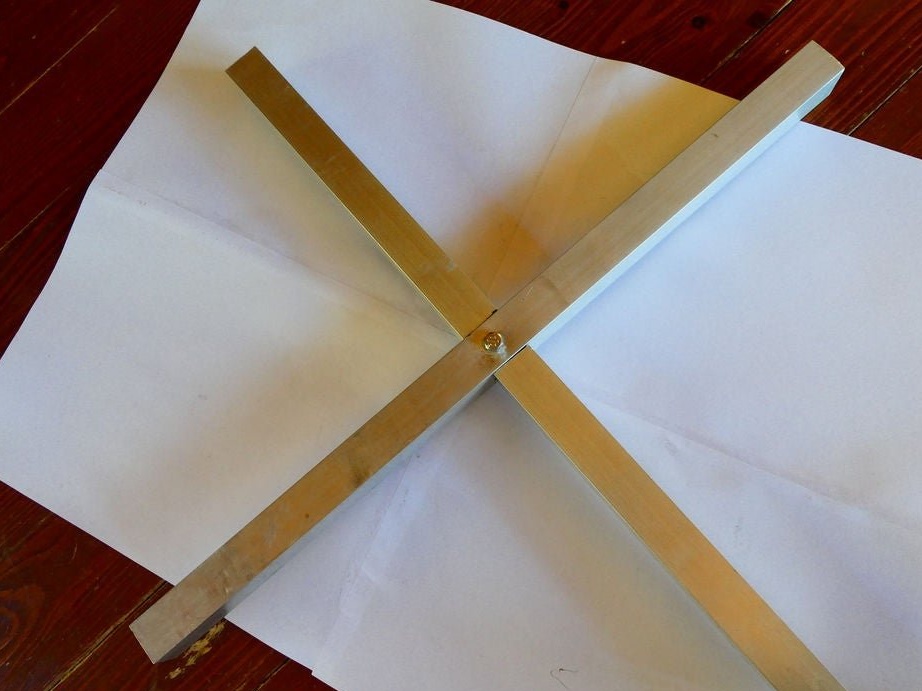
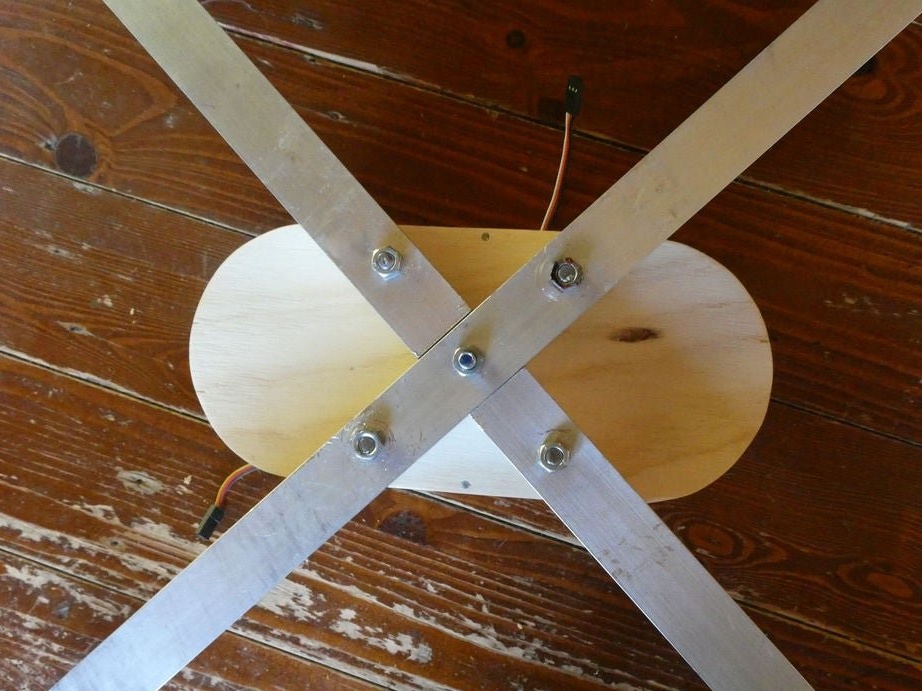
İkinci Adım: Çerçeve
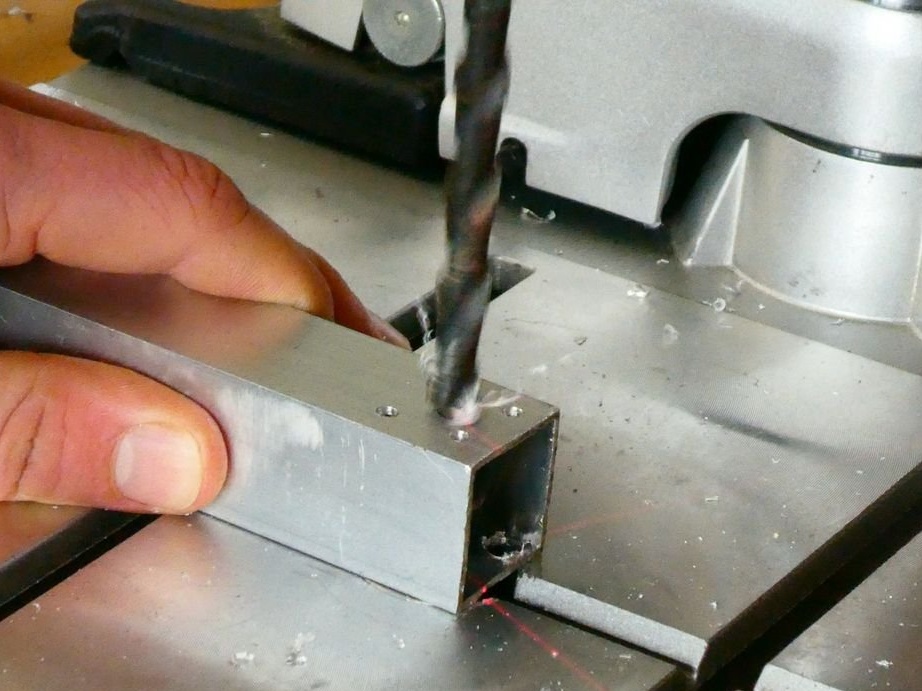
Alüminyum profil borusunu iki eşit parçaya (her biri 50 cm) kesin. Boruların ortasına 2,5 cm'lik iki oluk kesin, deliğin ortasını delin. Haçı monte edin ve bir cıvata ile sabitleyin.

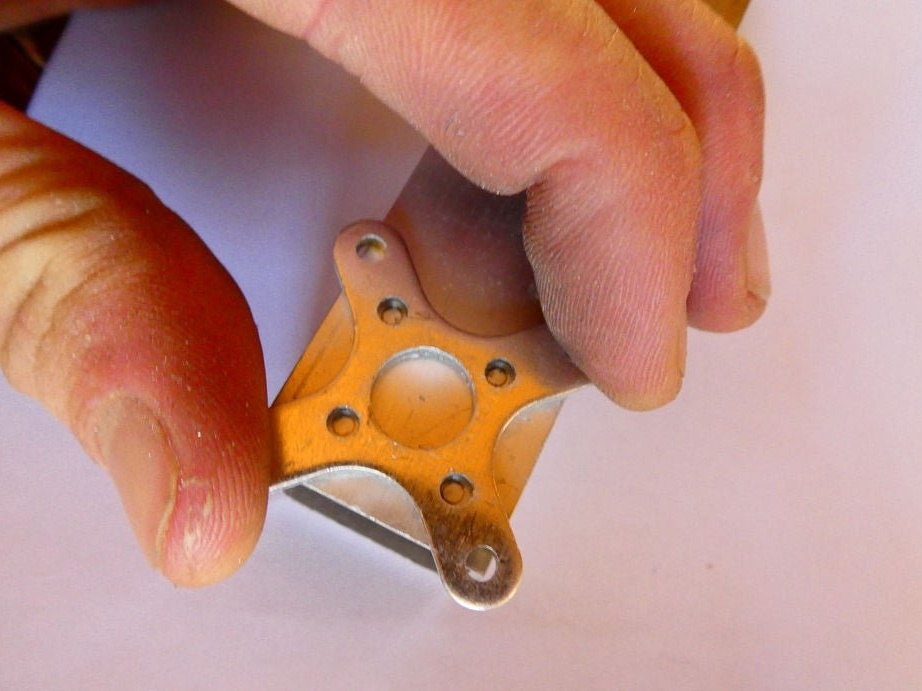
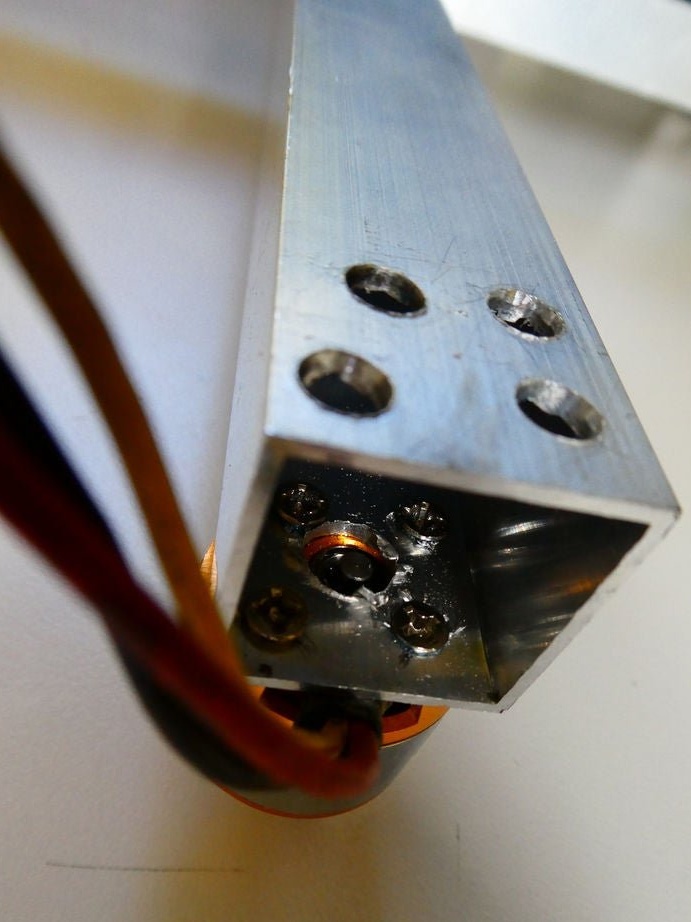
Şimdi montaj deliklerini işaretlemek için onlarla birlikte gelen motor yuvasını kullanın. Delik delin. Dikenler zımparalanmalıdır.

Şasiyi çerçeveye bağlamak için montaj deliklerini işaretleyin ve delin.
Yan şeritleri gövdeye yapıştırın.

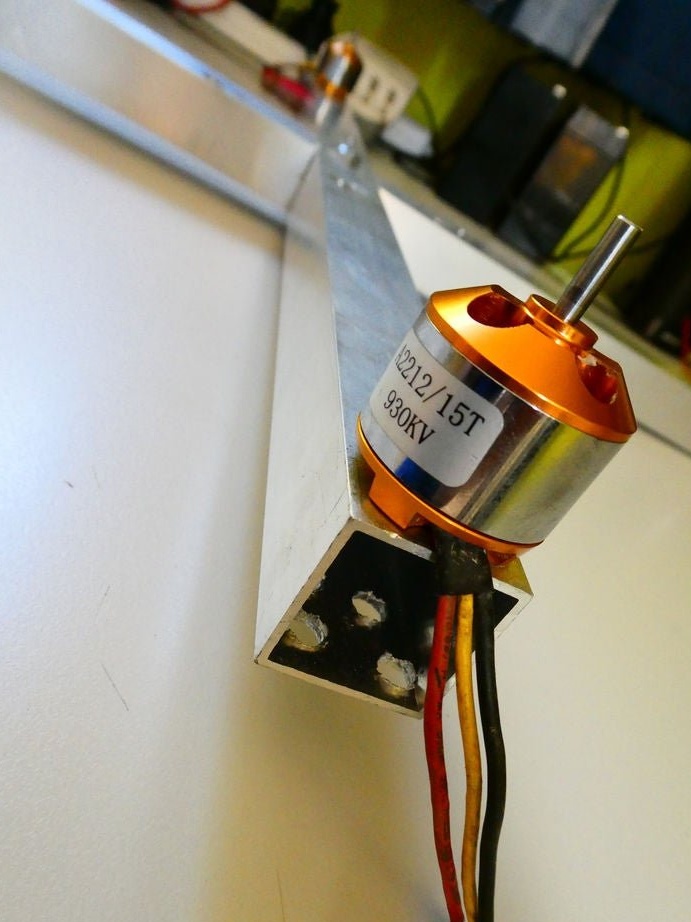
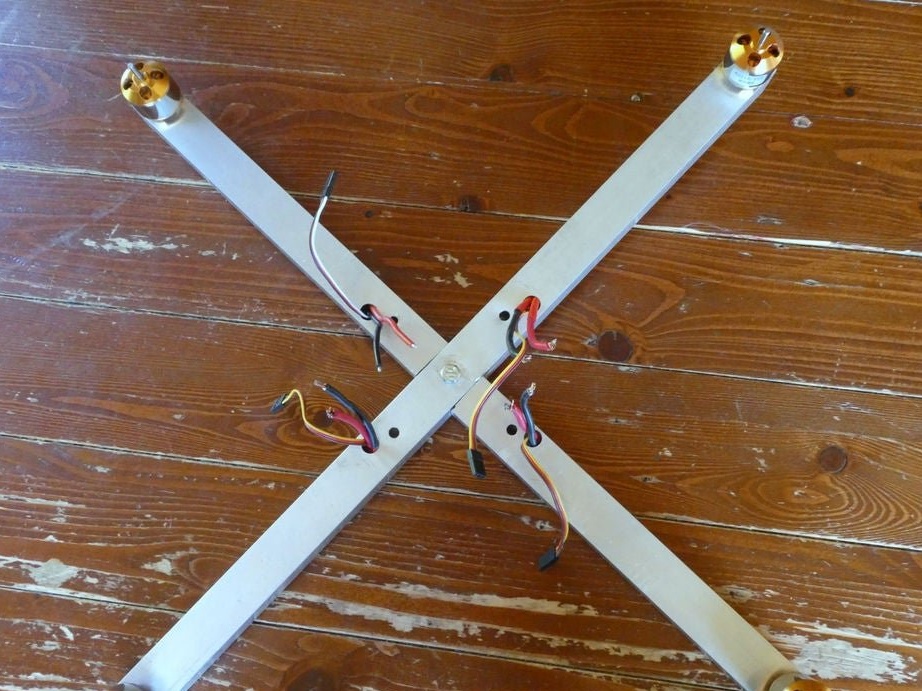
Üçüncü Adım: Kurulum
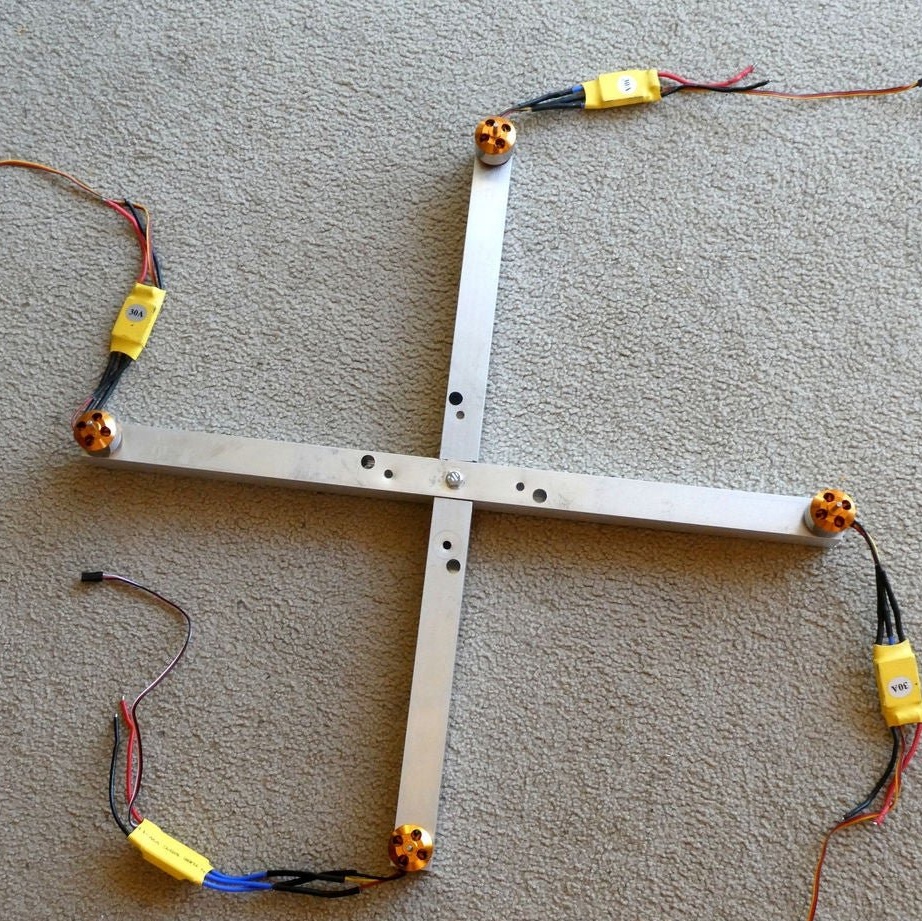
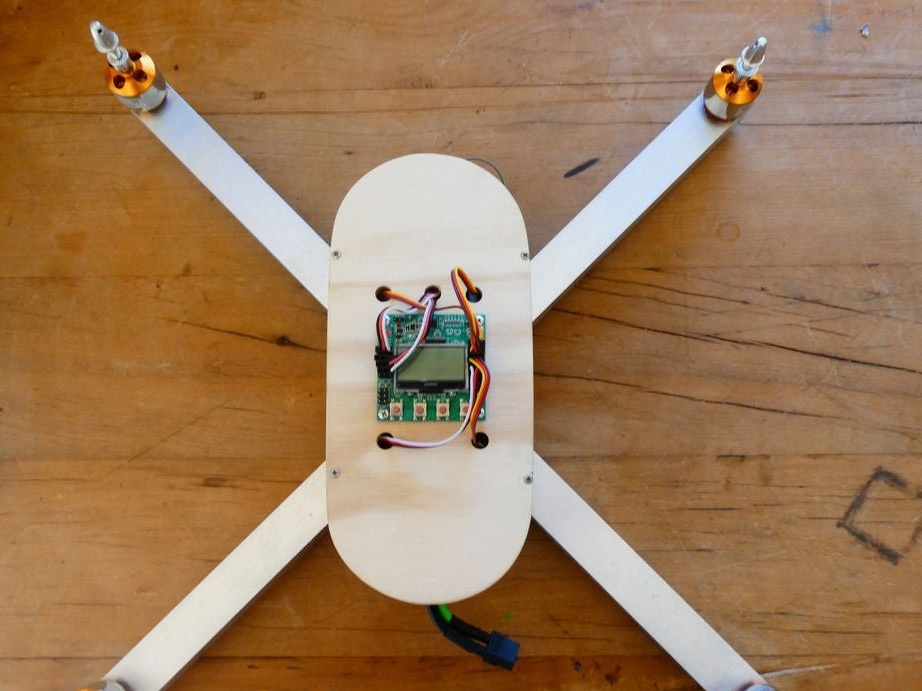
Şimdi motorları çerçeveye sabitlemeniz gerekiyor. Sabitleme vidalarına bir diş kilidi uygulamak kesinlikle gereklidir, aksi takdirde vidalar sökülecek ve motorlar uçacaktır.
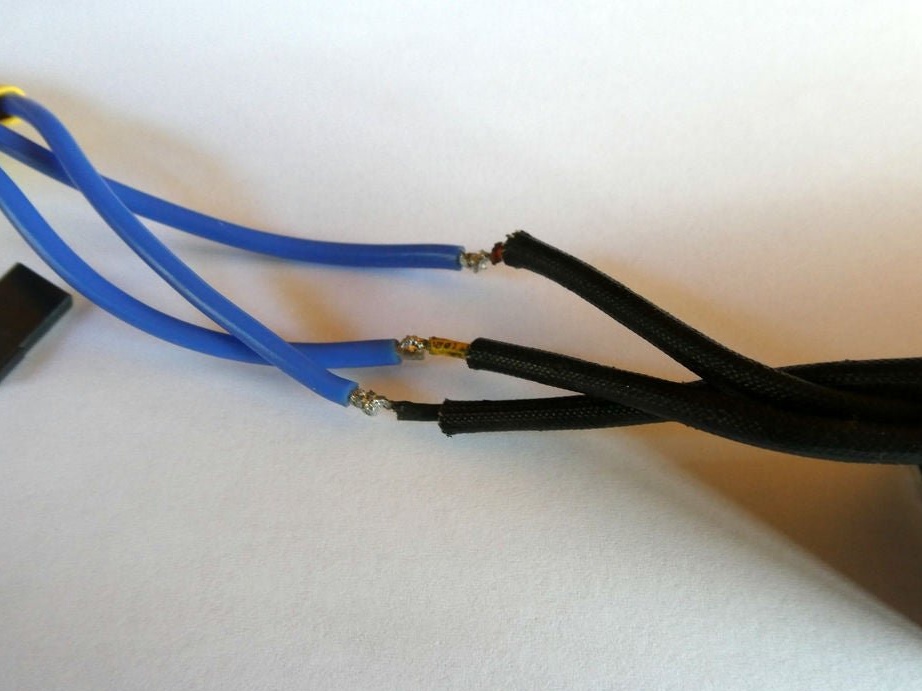
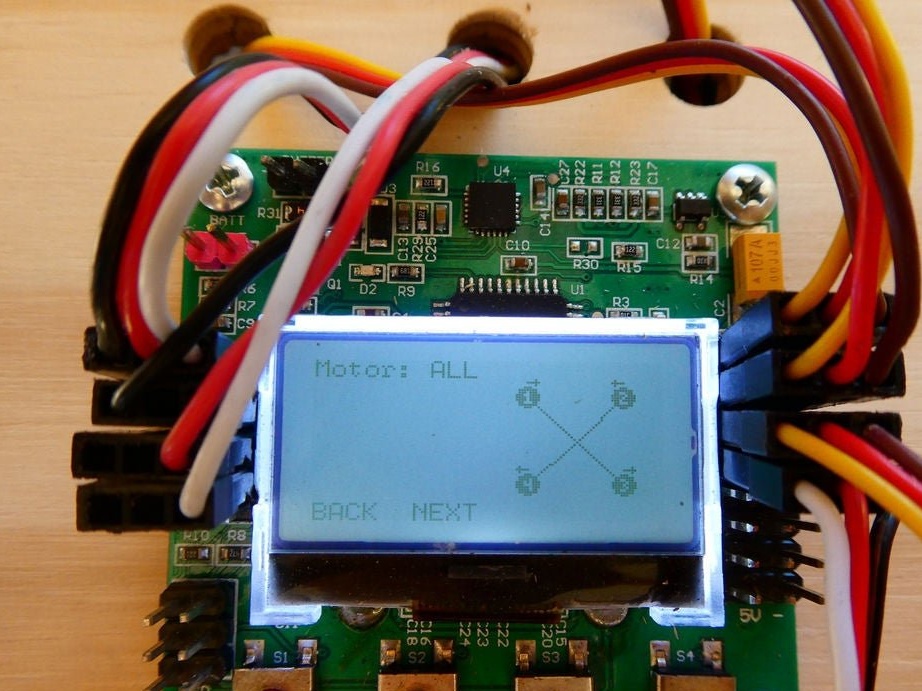
ESC'yi motorlara, sol üst motor saat yönünde, sağ üst motor saat yönünün tersine, sağ alt motor saat yönünde ve sol alt motor saat yönünün tersine dönecek şekilde bağlayın. Motorların dönme yönünü değiştirmek için üç telden ikisini değiştirin. Bağlantıları izole edin.
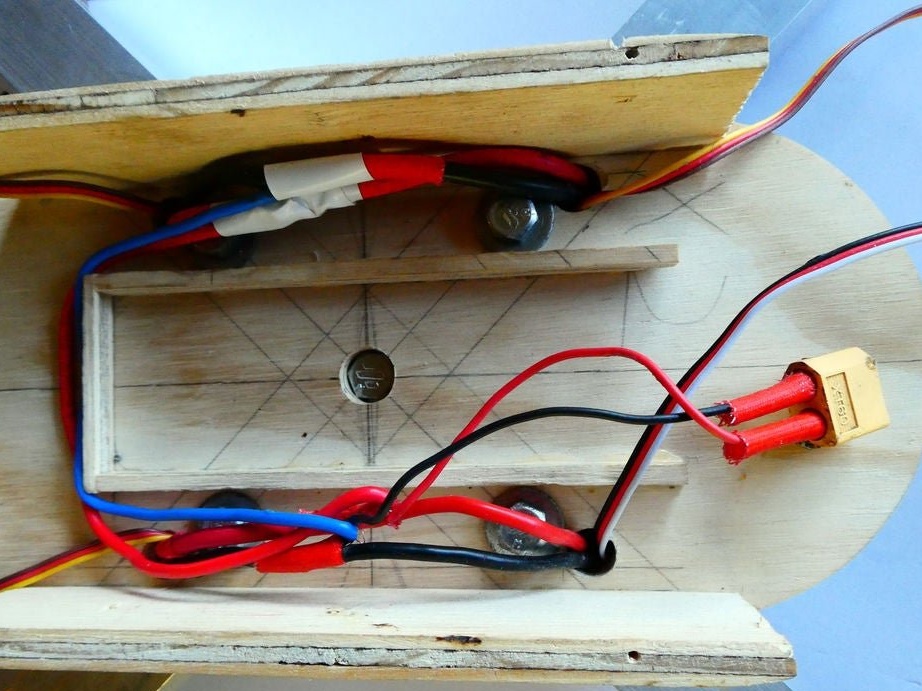
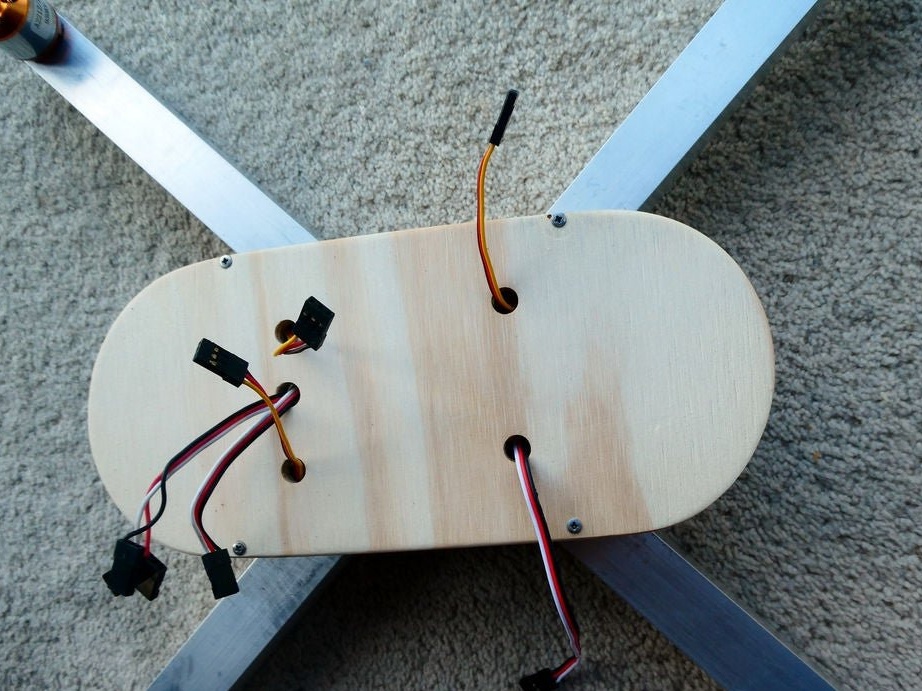
Telleri çerçeveden çekin ve deliğe çekin, ESC çerçevenin tüplerinin içine sabitlenir.

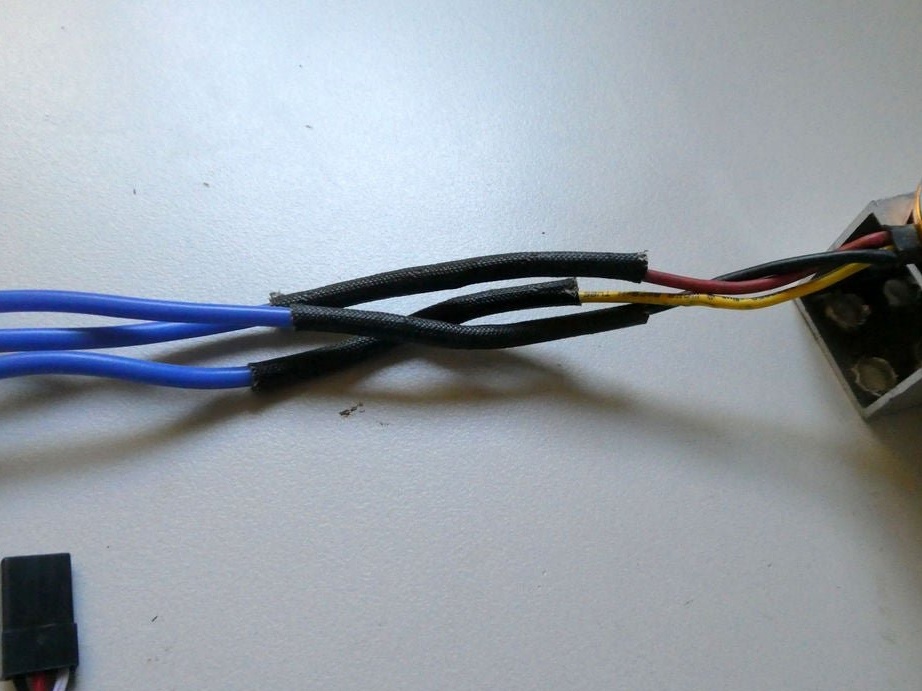
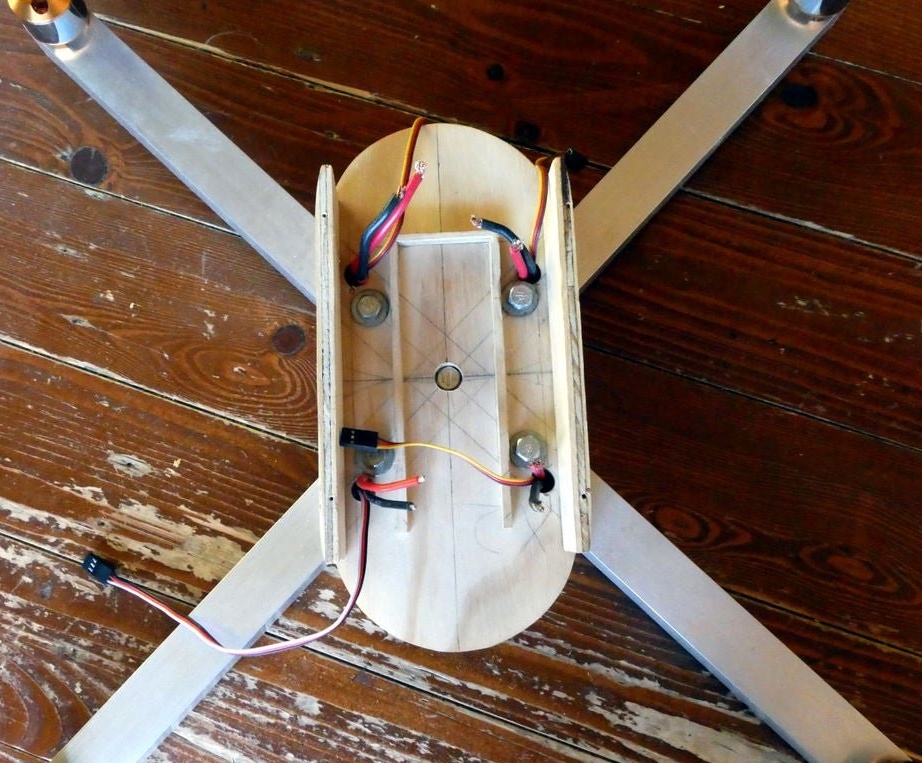
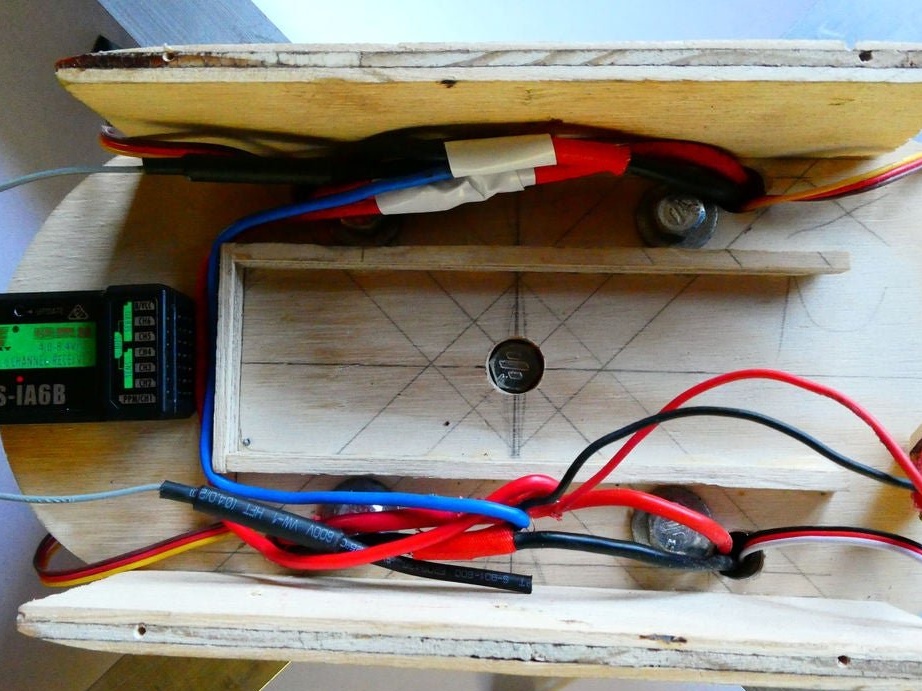
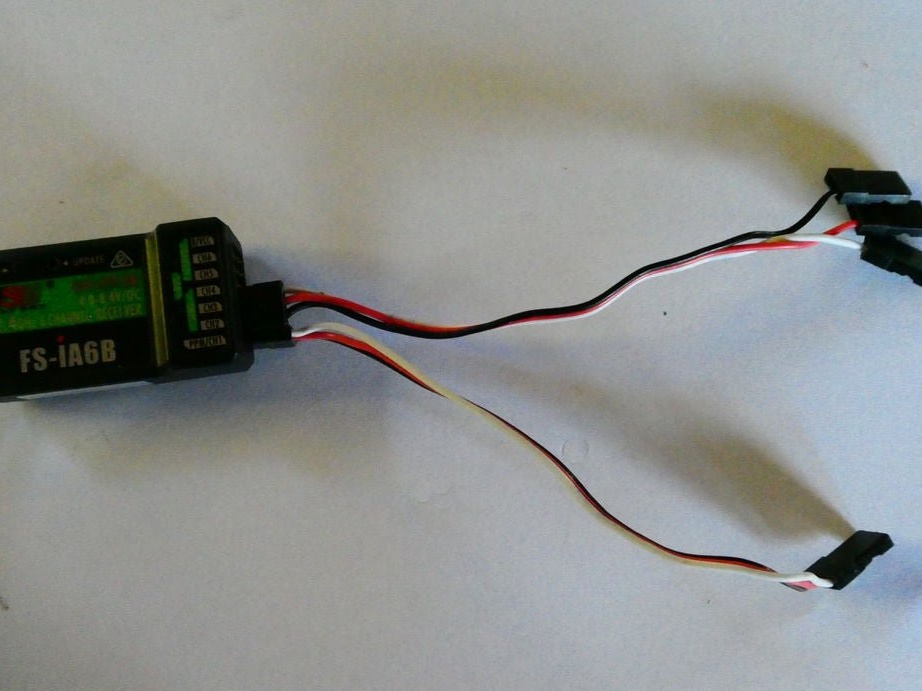
Tüm siyah (eksi) ve tüm kırmızı (artı) kabloları birbirine bağlayın. İki kabloyu XT60 konnektörüne lehimleyin (kırmızı ve siyah). Alıcıyı çift taraflı bant kullanarak kasaya sabitleyin.
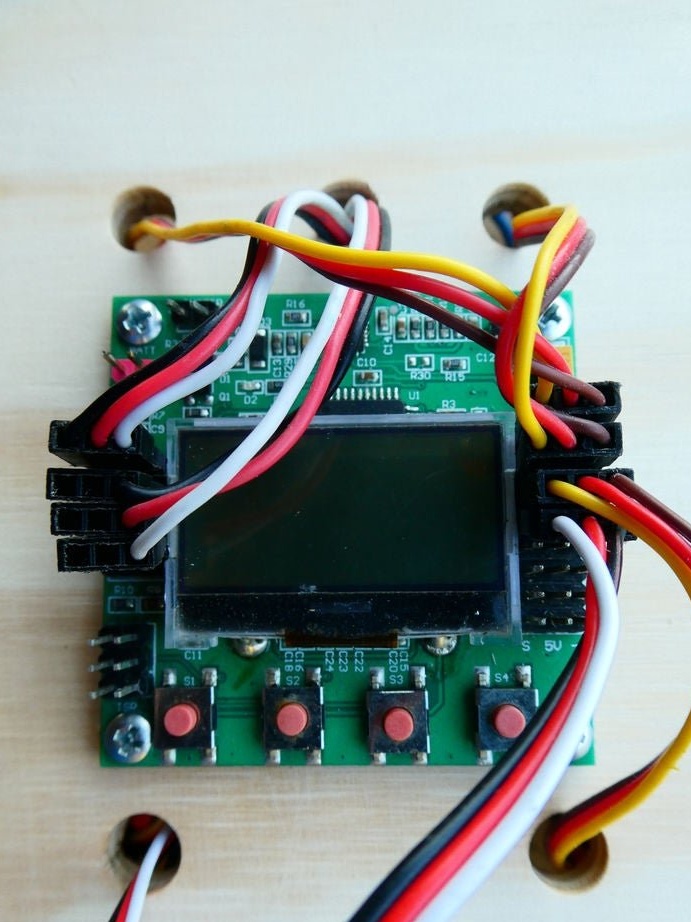
Kabloları kontrolör ve alıcıdan bölme kapağındaki deliklerden çekin, ardından kapağı vidalayın. Denetleyiciyi kapağa vidalayın. Kabloları uçuş kontrol kartına bağlayın.
Dördüncü Adım: Kurulum
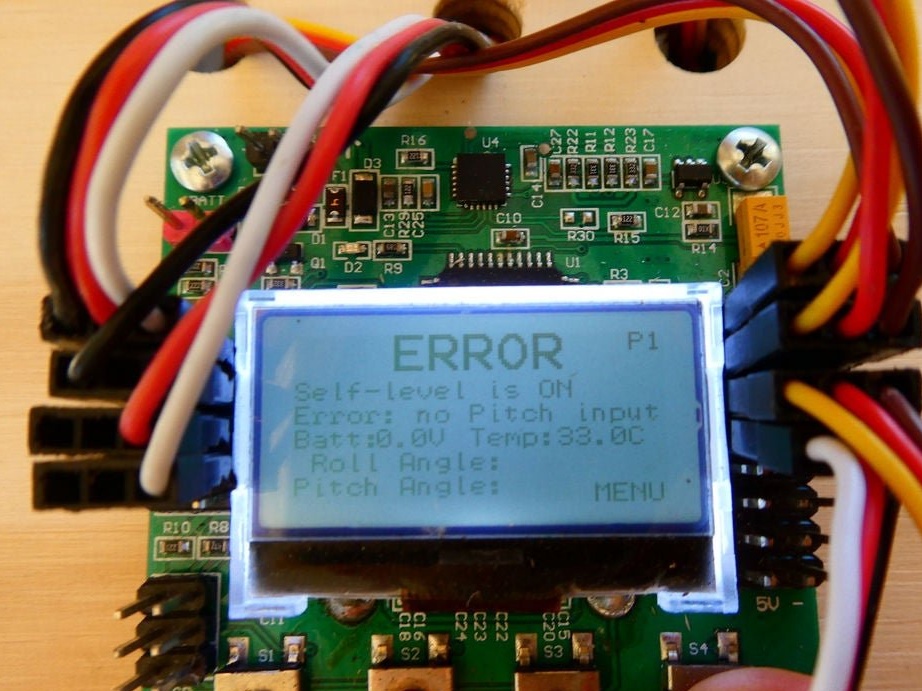
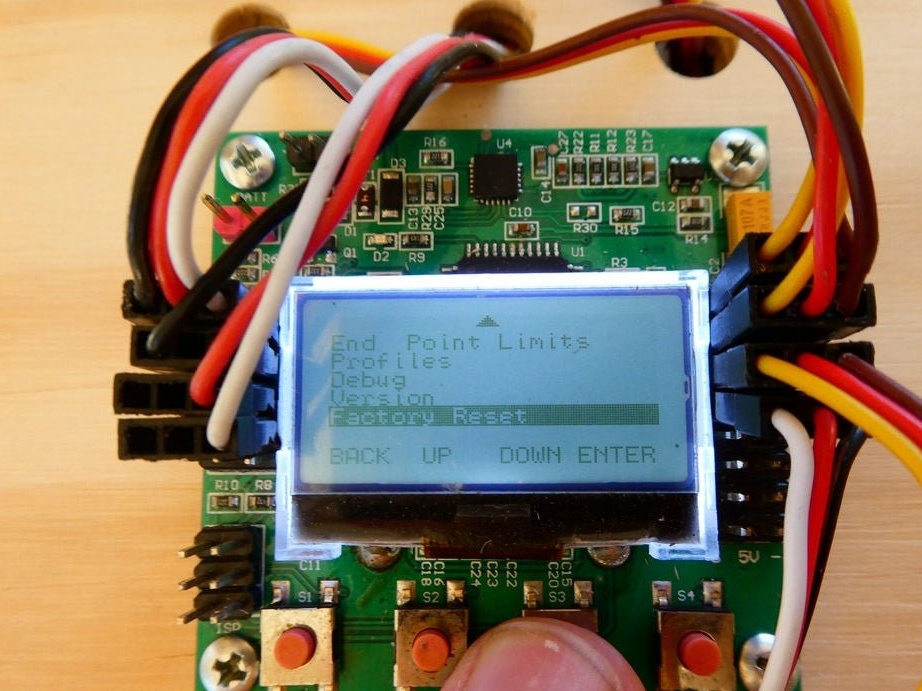
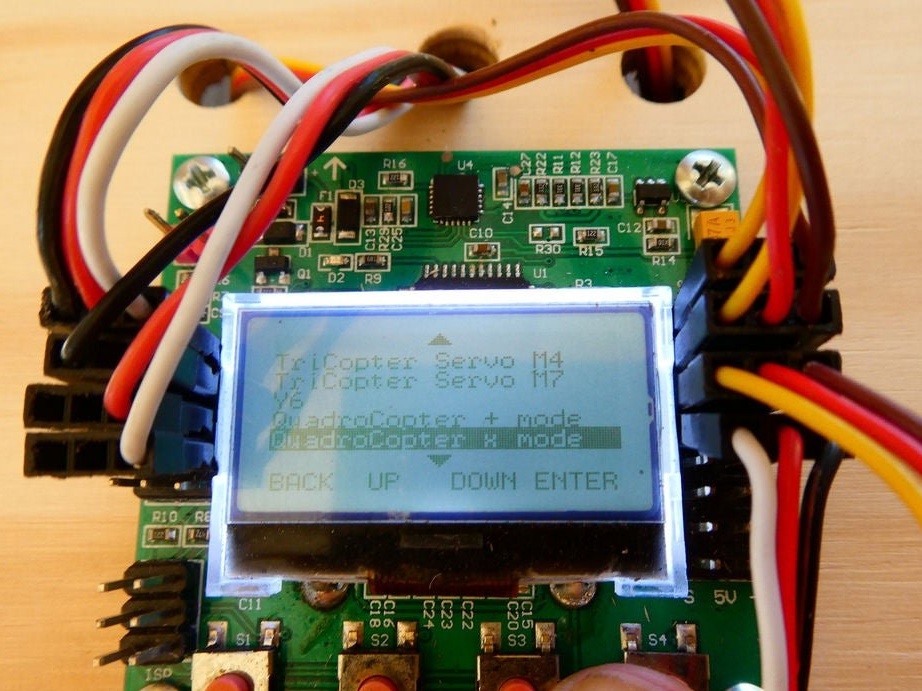
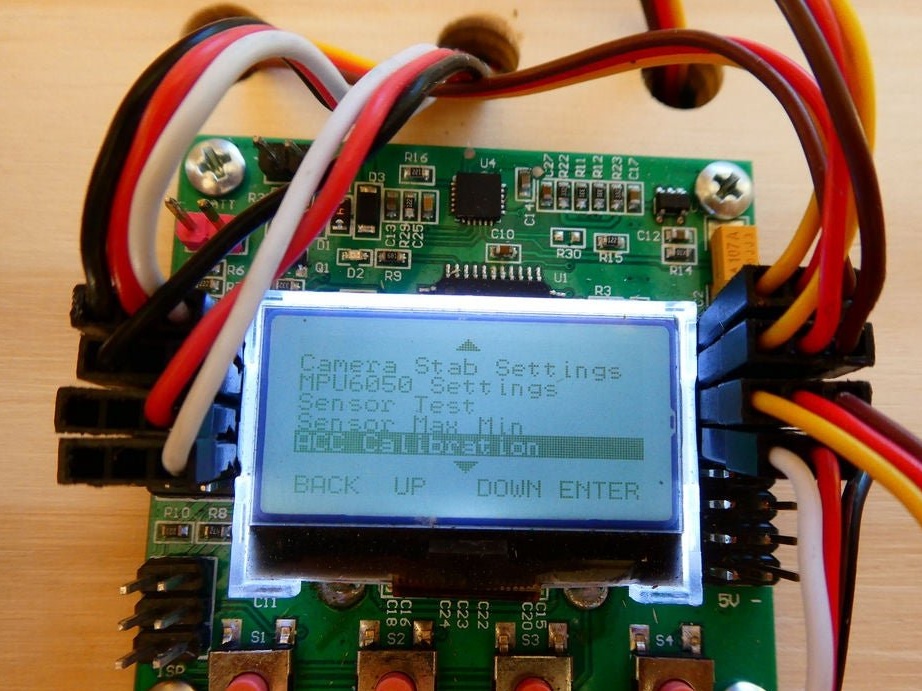
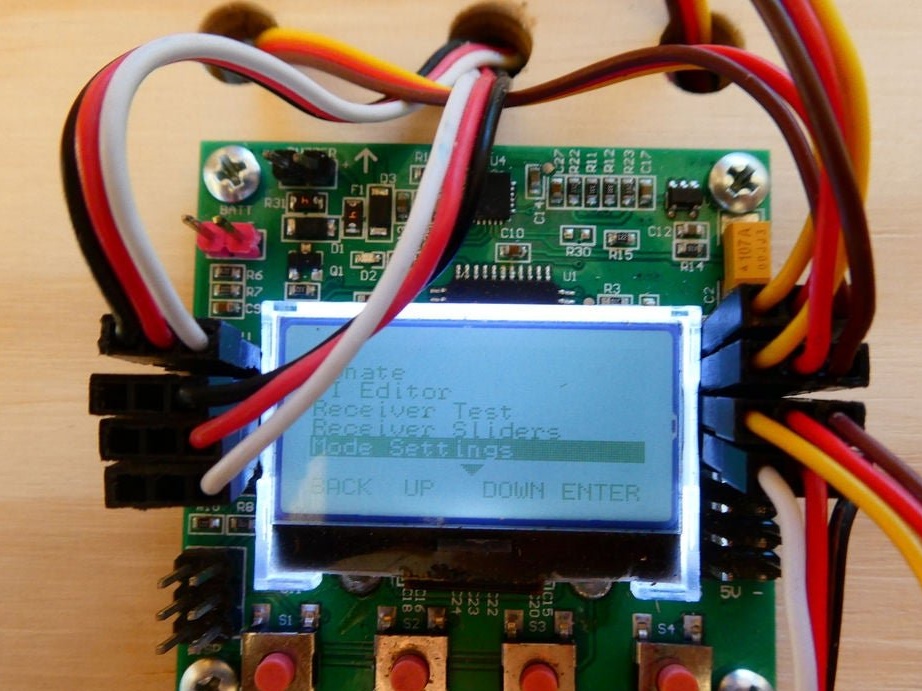
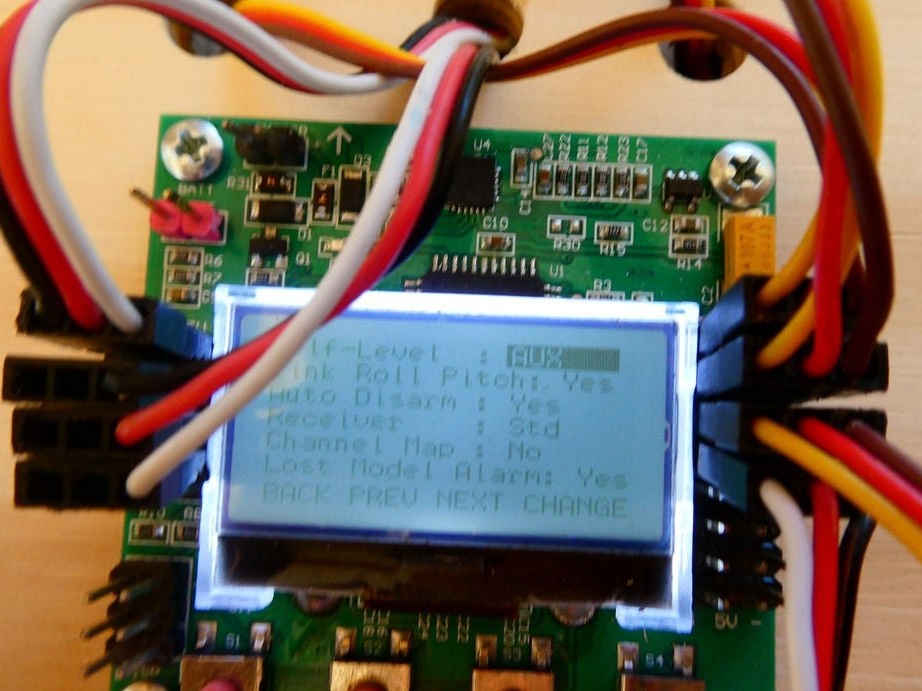
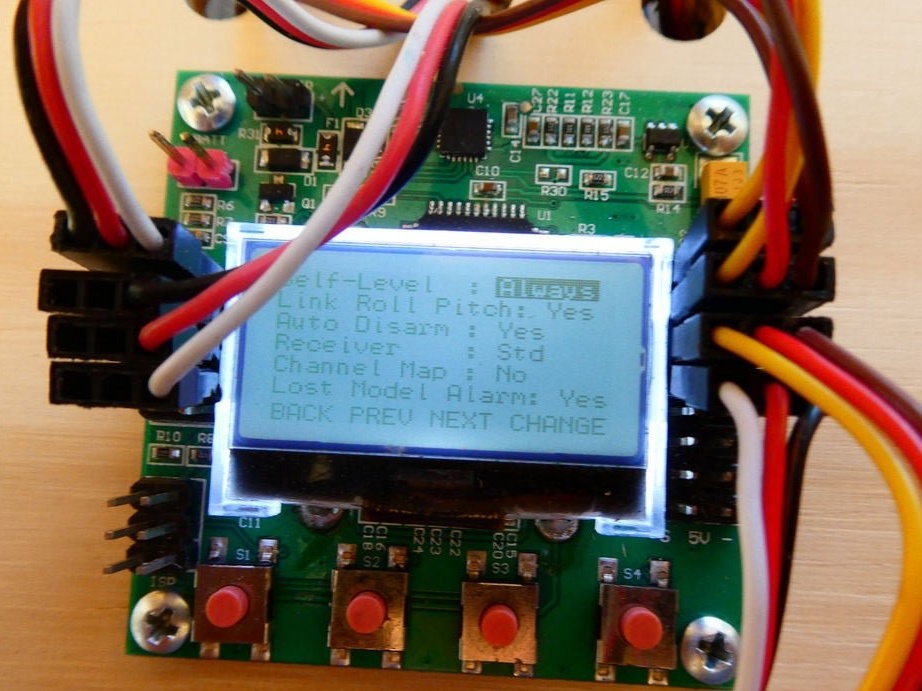
Pili bağlayın, kontrolör önyükleme yapmalıdır. Ekranda bir hata mesajı görünmelidir. Yoksayın ve menü düğmesine basın. Aşağı kaydırın ve "sıfırla" yı tıklayın. Ardından, dronların istenen çerçevesini seçmek için bir menü görünmelidir. Quadcopter-X moduna ulaşıncaya kadar aşağı kaydırın ve “kabul et” e basın. Geri basın ve “AUX kalibrasyonu” nu seçin. Drone'yu düz bir yüzeye yerleştirin ve “kalibre” ye basın. Bu yapıldığında, mod ayarlarına gidin ve otomatik seviyeyi “AUX” ten “Her zaman” olarak değiştirin.
Pili kapatın, kumandayı açın ve ardından pili yeniden bağlayın. Uçuş kontrol cihazı açılmalı ve SAFE göstermelidir. Soldan sola hareket ettirdiğinizde ekran SAFE'den ARMED'e değişmelidir,
Beşinci Adım: Pervaneler
Vidaları motor şaftlarına sabitleyin.


Herşey hazır. Ve son olarak, ustadan birkaç ipucu.
İlk başta, quadrocopter'i kontrol etmek zor görünebilir. Bir uçuş başlatmanın en iyi yolu yerden yaklaşık 1 metre yukarı tırmanmak ve ileri geri, sola ve sağa uçmak ve daha sonra bir daire içinde bir quadcopter başlatmaktır. Quadcopter “ovma” uçuşunu sevmez, bu yüzden sorunsuz çalışmayı öğrenin.
Uçmaya başlayarak, her zaman bildiğiniz şekilde dronun arkasını size dönük tutun.
Karbon fiber vidalar plastik vidalardan daha güçlüdür ve böyle kırılmaz.


