
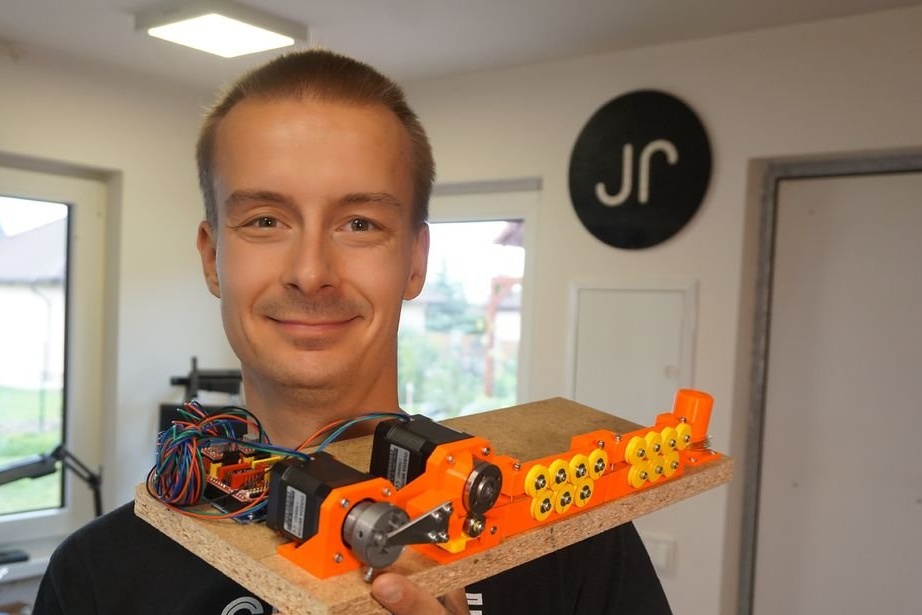
Üstat tarafından ilginç bir cihaz icat edildi ve üretildi, bu herhangi bir şekildeki teli bükmek için bir cihaz. Yay yapmak özelliklerinden biridir. Bu makine 0.8 / 0.9 / 1 mm kabloyu herhangi bir 2D şekle bükebilir.
Bu makinenin üretiminin ana amacı bükme işlemini otomatikleştirmekti. Diğer ev yapımı makineler çok doğru değildir ve kıvrımları oldukça büyük bir yarıçapa sahiptir.
İkinci görev, yaygın olarak bulunan parçalar ve bileşenler kullanılarak mümkün olduğunca basit hale getirmekti. Makinenin bazı parçaları 3D yazıcıda basılır ve metal parçalar mağazadan satın alınabilir.
Böyle bir makinenin efendisi ne için? LED figürler, kar taneleri, yıldızlar, çiçekler vb. İmalatlarında telden aynı parçalar gereklidir ve bu makine imalatlarını kolaylaştıracaktır.
Cihazın bir örneğiyle kısa bir video izleyelim.
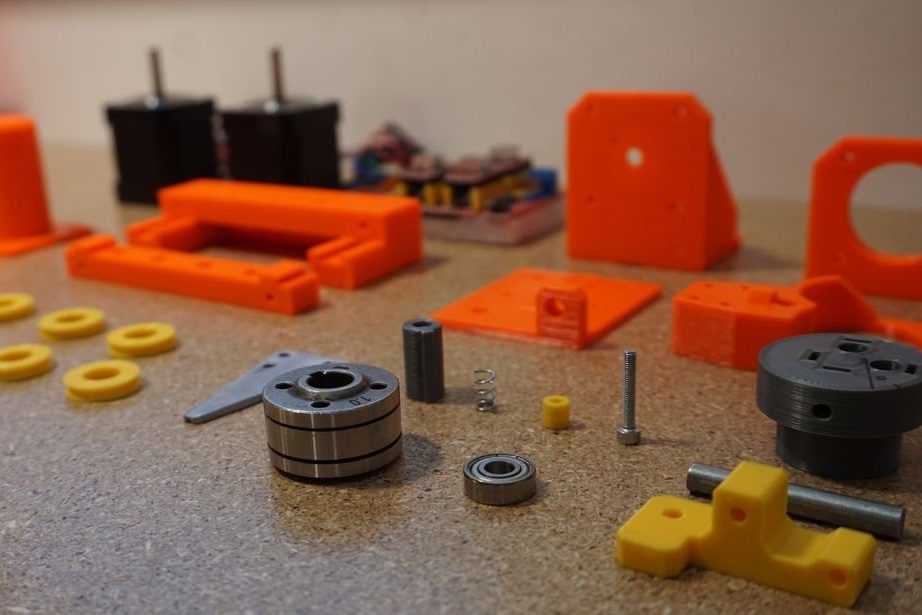
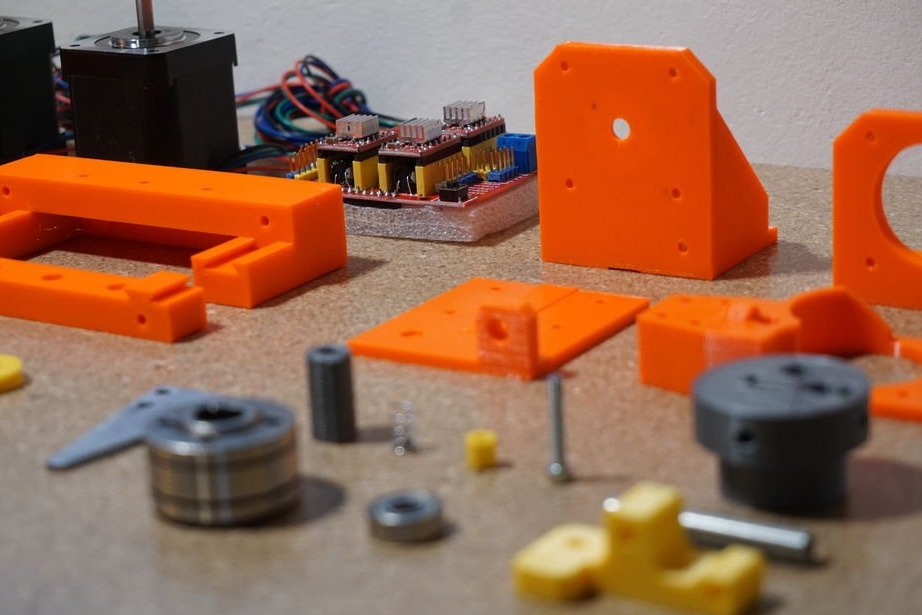
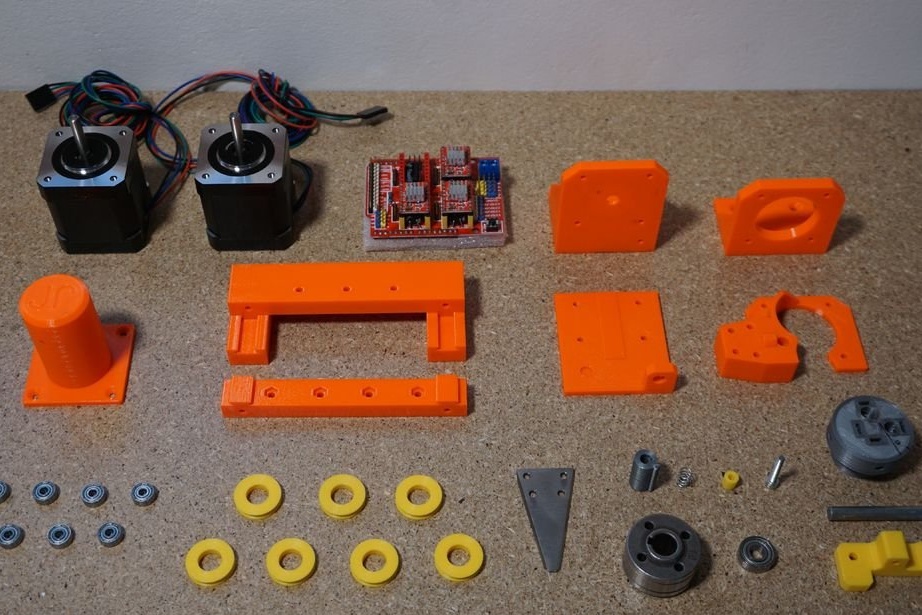
Yani, böyle bir makinenin üretimi için usta aşağıdakileri kullandı
Araçlar ve malzemeler:
-3D ayrıntıları (yazdırma dosyaları indirilebilir) burada);
-Krepezh;
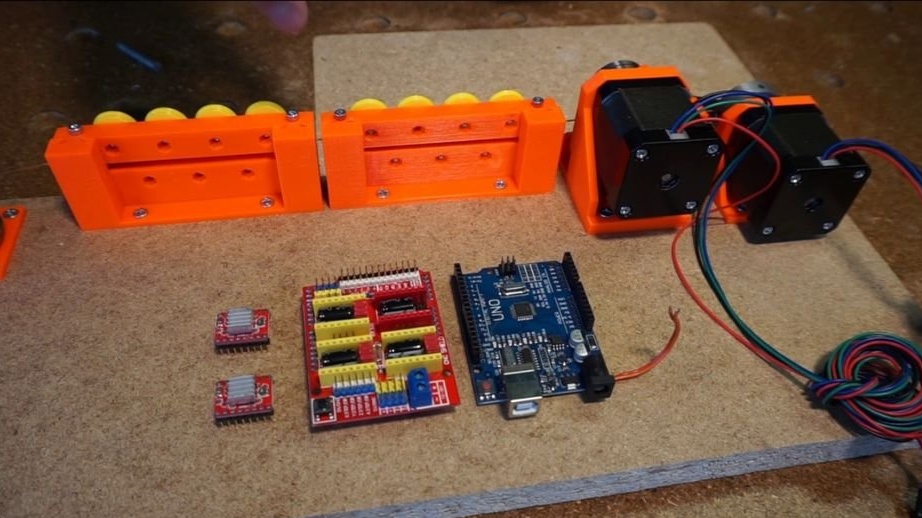
-Arduino UNO;
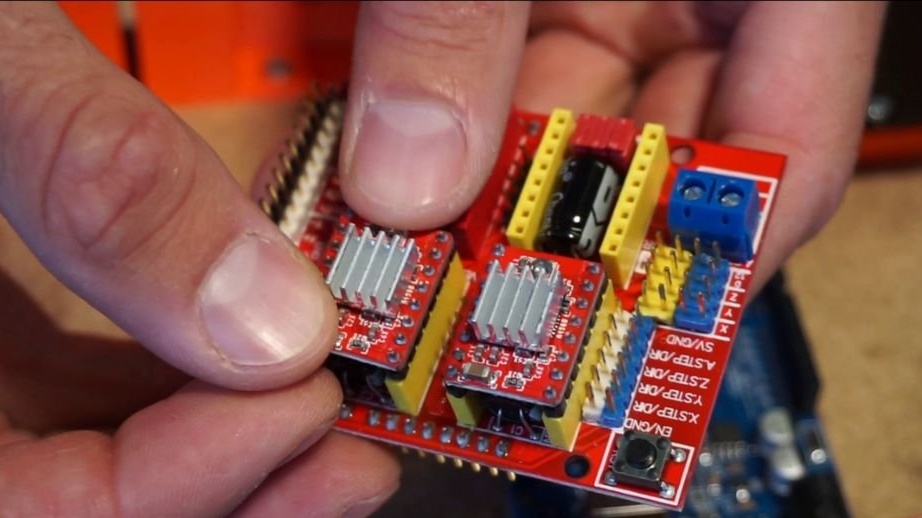
-Arduino UNO için genişletme kartı;
-Adım sürücüsü A4988 -2 adet;
-Adım motoru NEMA17 -2 adet;
-12V 3A güç kaynağı;
- tel besleme mekanizması;
-Çelik yay 4x6 mm;
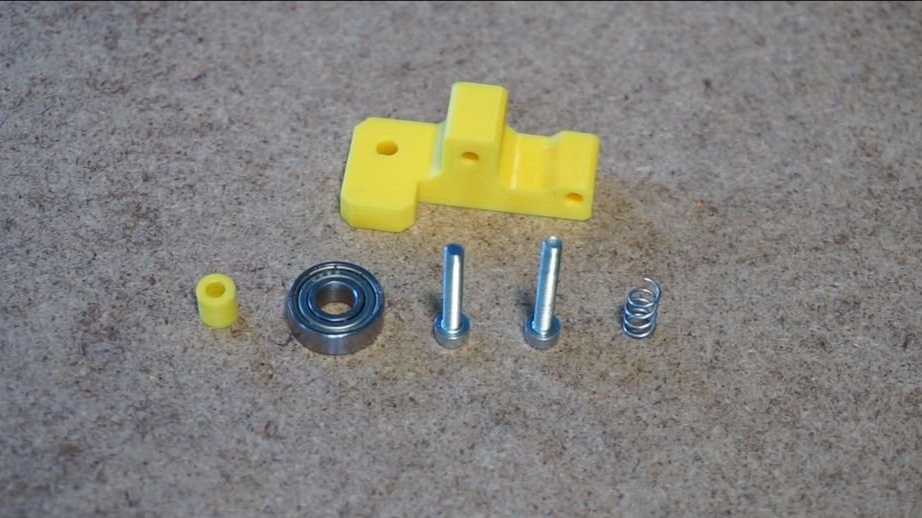
- Rulman 3x10x4 mm;
-Yatak 6x15x4 mm;
-6 mm çelik çubuk;
- 2 mm kalınlığında çelik sac;
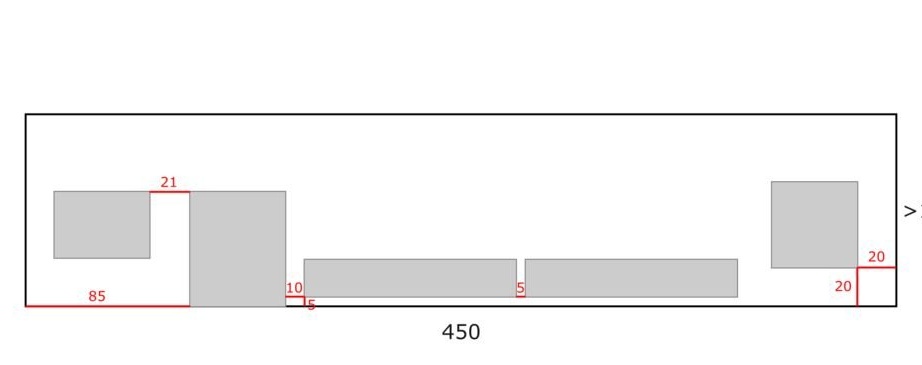
- Taban 450x100 mm için ahşap tahta;
- tornavida;
gon;
Birinci Adım: Nasıl Çalışır?
Makinenin nasıl çalıştığına bakalım (sağdan sola).
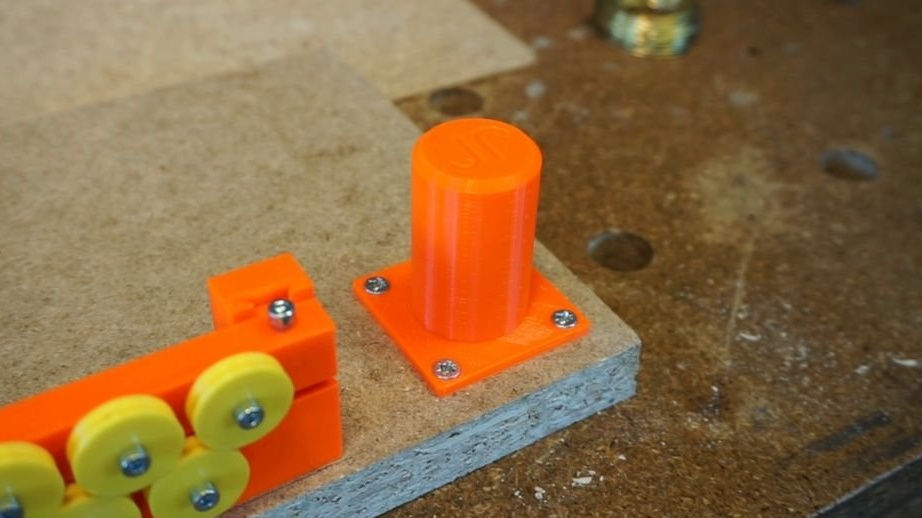
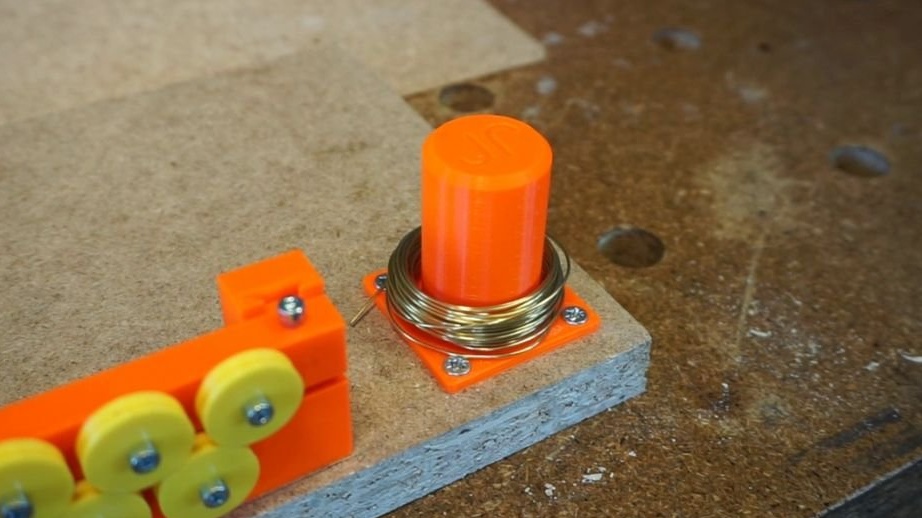
Makara tutucu - makineyi işlemek için tel makarasını tutar.
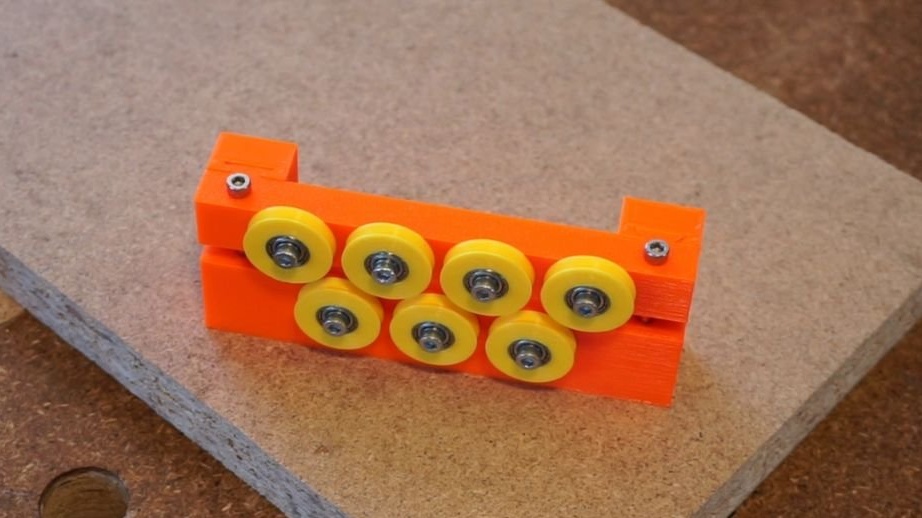
Doğrultucu - telin mümkün olduğunca eşit olması için 7 silindirden oluşan bir set. Düz tel ile çalışmak çok önemlidir. Bu yüzden iki doğrultucu.
Broach - 3D yazıcınızda benzer bir mekanizma bulabilirsiniz. Bir dizi dişli, teli makaradan silindirlere doğru çeker ve bükme kafasına iter. Besleme mekanizması kaymayacak şekilde yeterli tel basıncına sahip olmalıdır. Bu konuyla ilgili daha sonra.
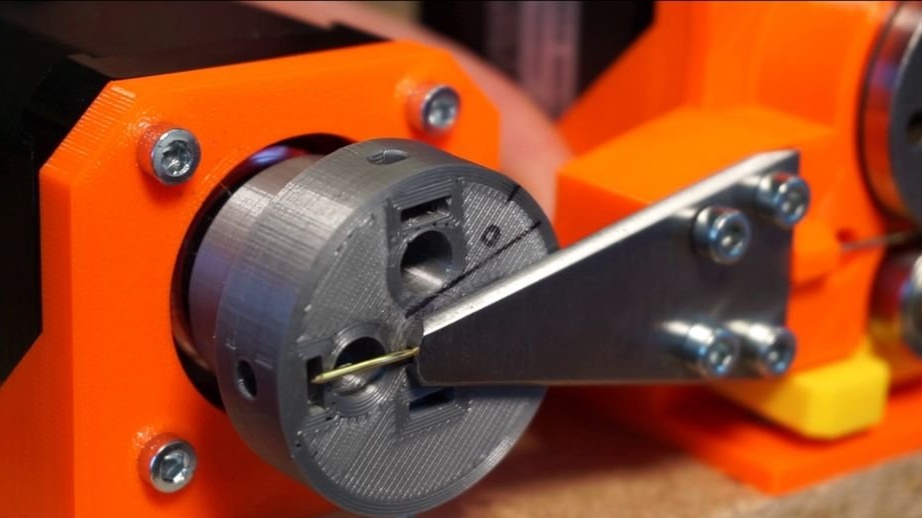
Bükme makinesi - teli programlanmış bir forma büker.
Bütün bunlar CNC kalkanlı bir Arduino UN tarafından kontrol edilir.Bilgisayardan Arduino'ya bir komut gönderilir ve bunları step motorlar için komutlara dönüştürür.

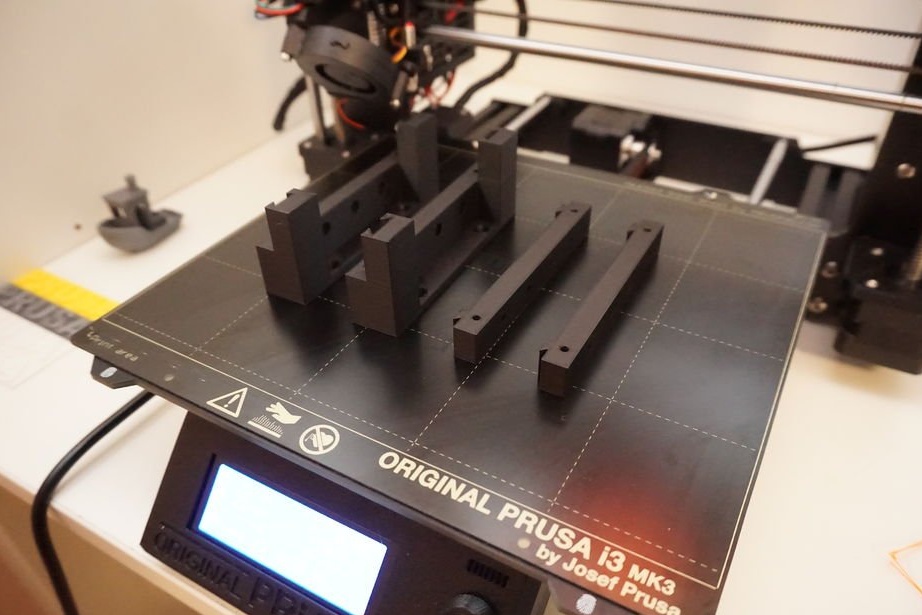
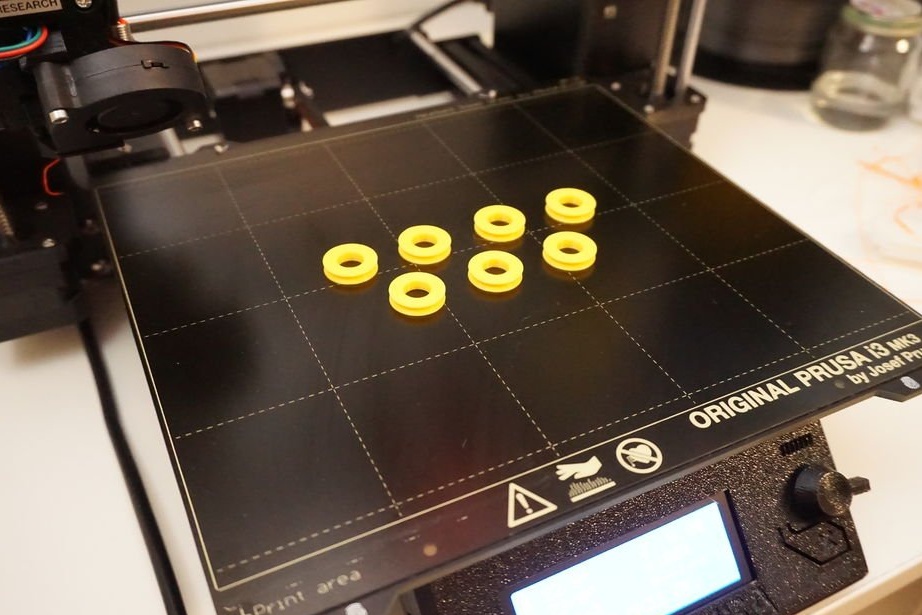
İkinci Adım: Parçaları Yazdırma
Aşağıdaki ayrıntıları ve aşağıdaki miktarda yazdırmanız gerekir (karışıklığı önlemek için orijinal metin):
cümbüş
Takım başı
Motor çerçevesi
besleyici
Motor çerçevesi
Alt çerçeve
Tel kılavuzu
Avara dişli arabası
Avara dişli ara parçası
Besleme dişli ara parçası
Bükme plakası (şablon)
Düzleştirici silindirler (2x)
Karyola (2x)
Üst dişli çerçevesi (2x)
Rulo (14x)
Makara tutucu
0,15 mm yazdırırken katman yüksekliği. % 40 dolum. Yazdırma 2 gün sürer.
Üçüncü Adım: Bükme Makinesi
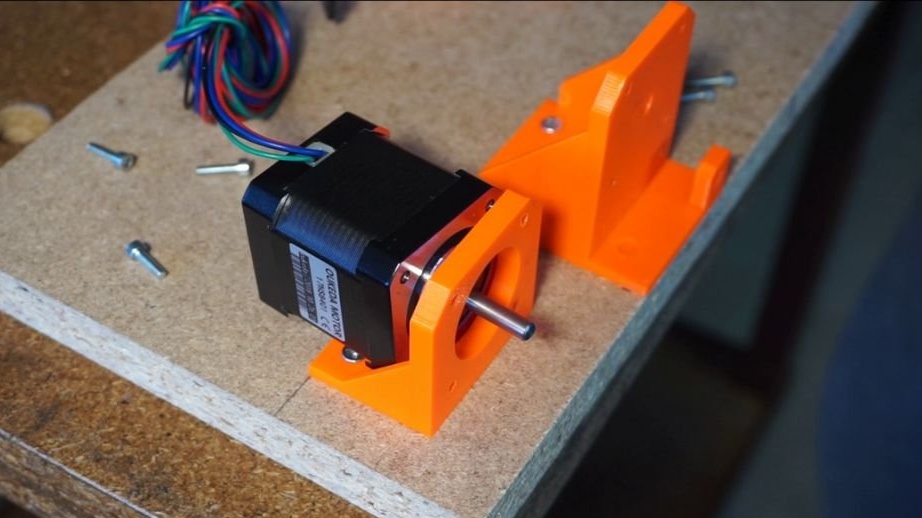
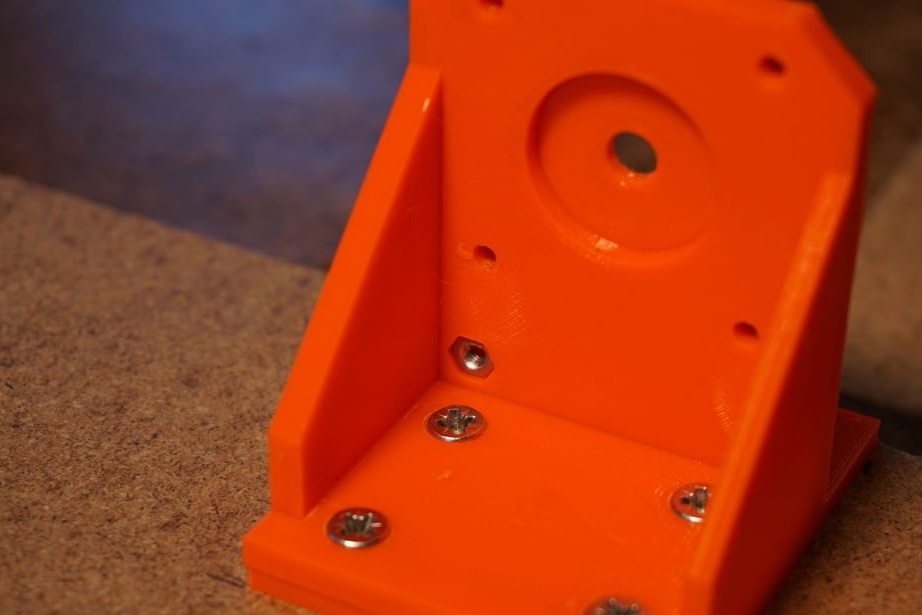
Master iki çerçeveyi tabana vidalar. Her iki çerçeveyi de çizimde gösterildiği gibi takmak önemlidir.
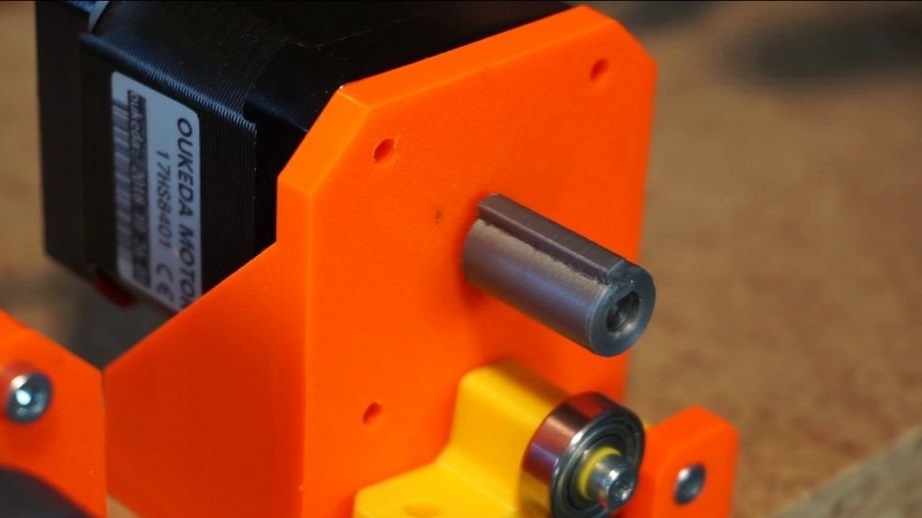
Step motoru şasiye sabitler. Kafayı motor miline sabitler.


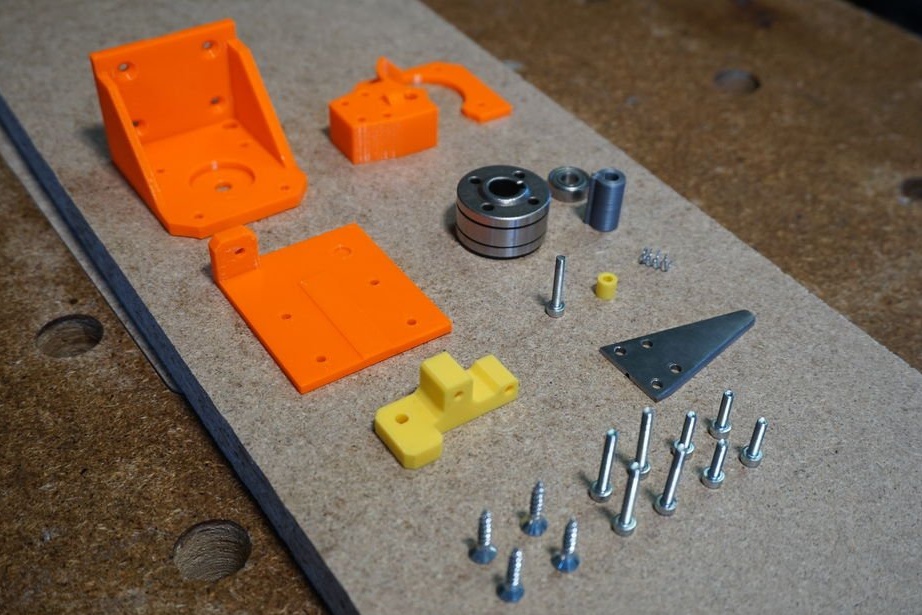
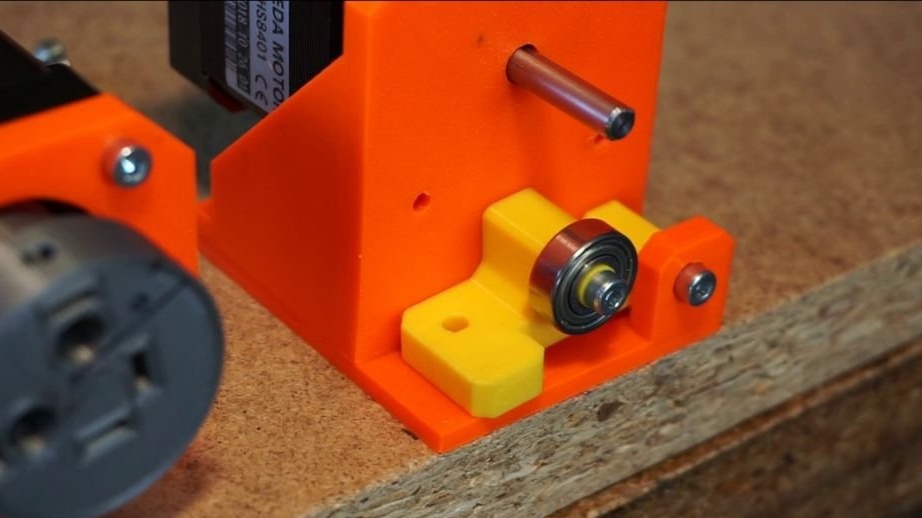
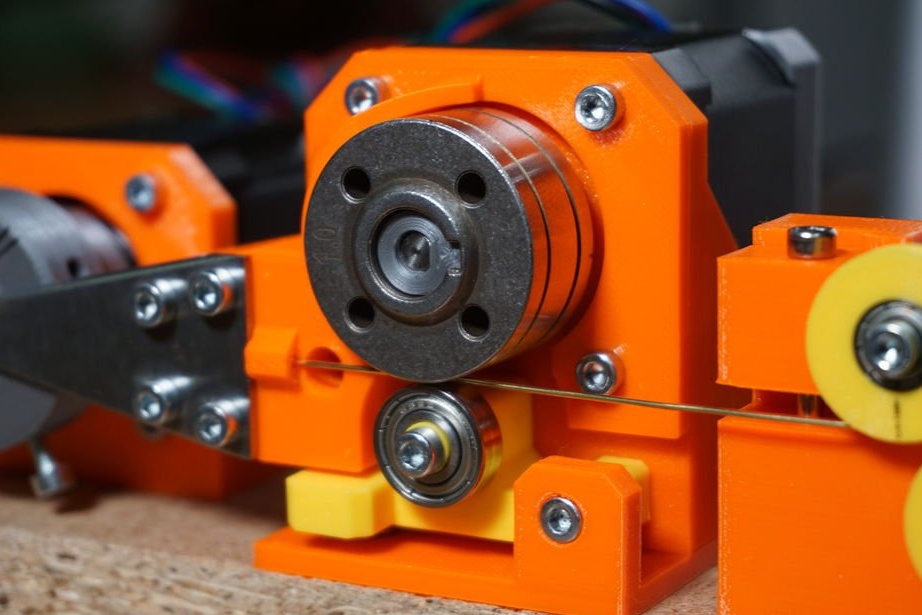
Dördüncü Adım: Broach
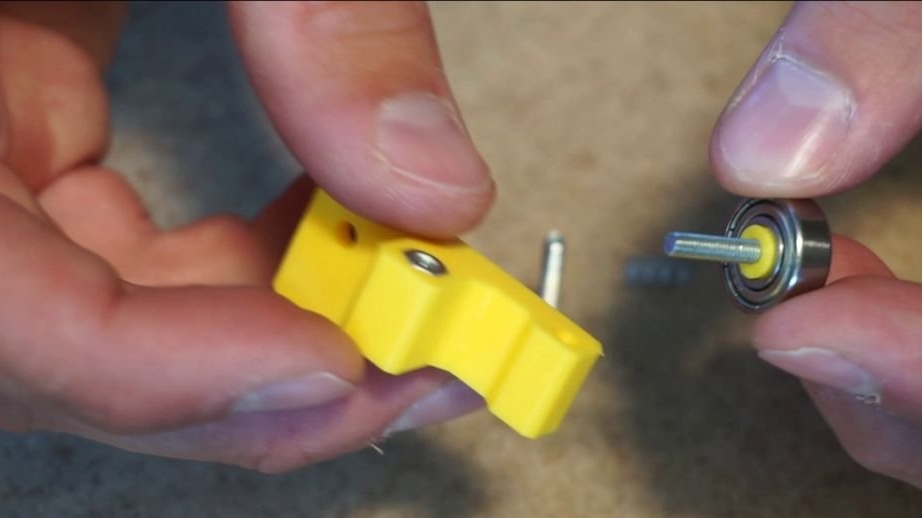
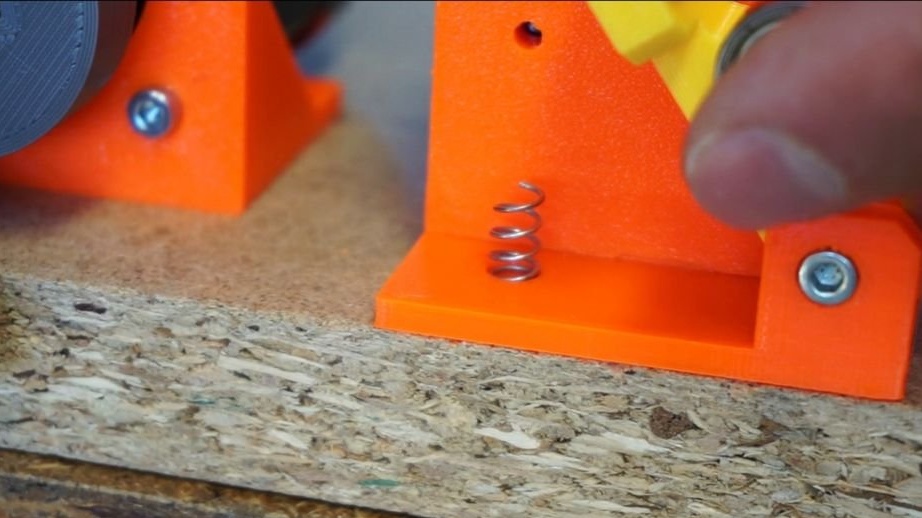
Çerçeve zaten monte edilmiştir, bu nedenle bir besleme mekanizması oluşturmanın ilk adımı, ara dişli için teli besleme mekanizmasına bastıracak bir taşıyıcı oluşturmaktır. 6x15x4 mm yatağın içindeki plastik contayı sökün. Yatağı M3x20 cıvatasına takın. M3 somununu taşıyıcıya takın ve yatağı cıvataya vidalayın. Rulmanın serbestçe döndüğünden emin olun. İkinci M3 somununu motor çerçevesine (sol alt köşedeki motor tarafı) takın ve M3x20 cıvatasını kullanarak şaryoyu küçük braketten vidalayın. Cıvatayı aşırı sıkmayın; taşıyıcı serbestçe hareket etmelidir. Taşıyıcıyı kaldırın ve yayı altındaki deliğe yerleştirin.
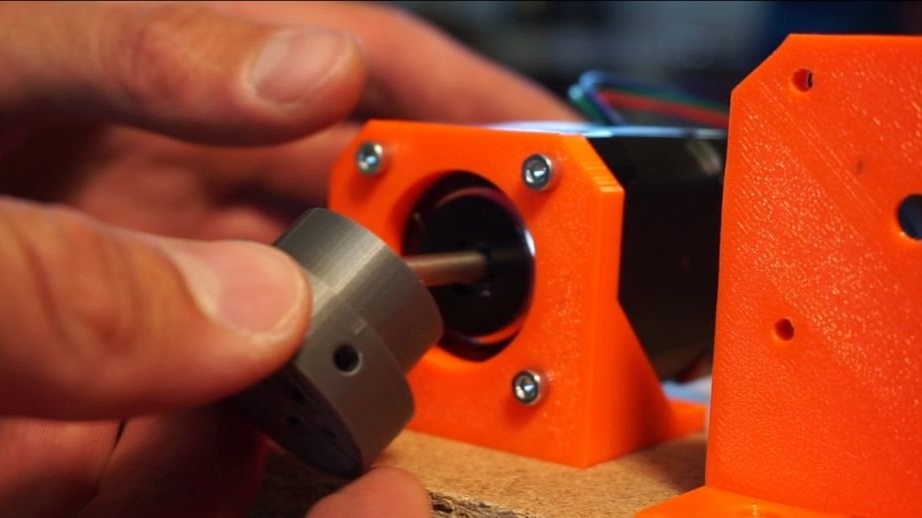
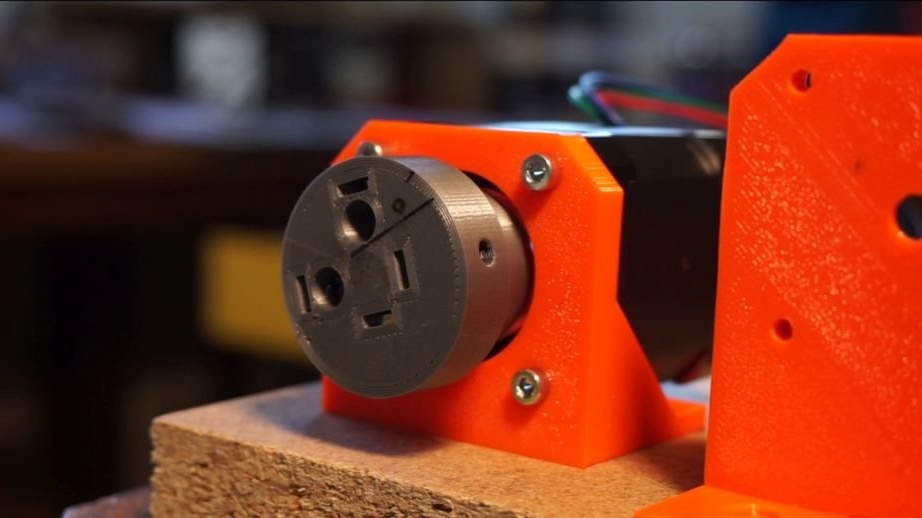
İkinci adım motorunu alın ve motor çerçevesine takın. Henüz vidalamayın. Besleme mekanizmasının ara parçasını motor miline bastırın ve besleme mekanizmasını takın.
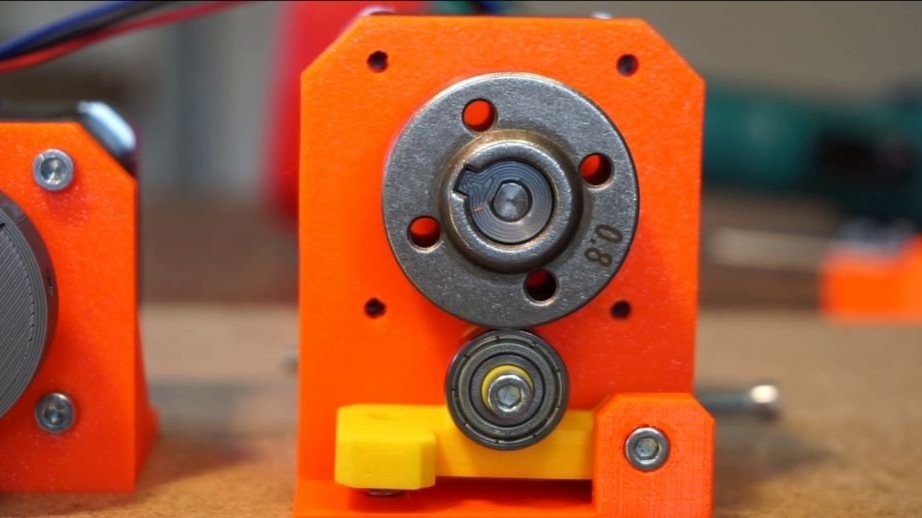
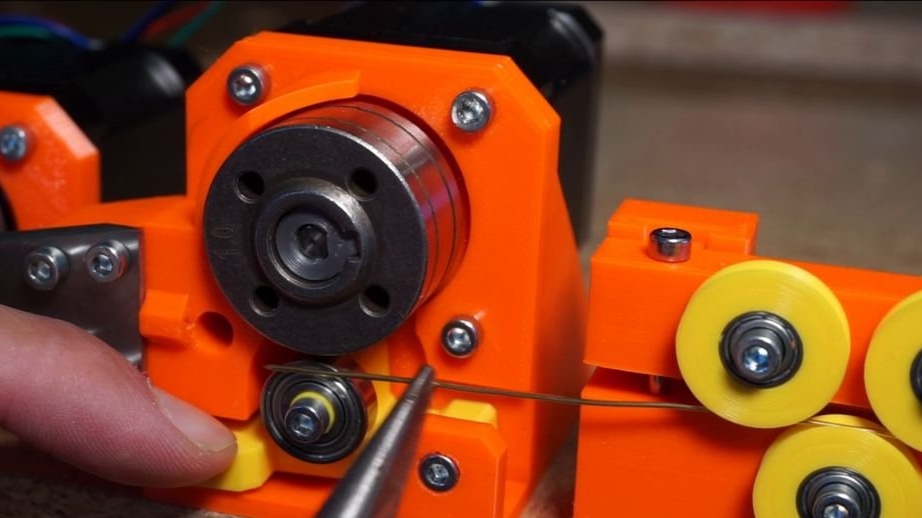
Kaptanın kullandığı besleme mekanizması bir MIG kaynak makinesinden alınır. Mekanizmanın bobin üzerinde iki girintisi vardır. Biri 0,8 mm tel için ve bir tanesi 1 mm tel için. Dişlilerin aksine (daha önce usta teli onlarla beslemeye çalıştı), bu mekanizma tel üzerinde iz bırakmaz.
Besleyici ve bükme cihazı, bir bükme plakası ile bağlanır - 2 mm kalınlığında, arka duvarda küçük bir oluğa sahip, mükemmel bükme için teli doğrudan bükme kafasının merkezine besleyen bir metal plaka. Baskı için, harika çalışan, ancak çabuk yıpranan ve sık sık değiştirilmesi gereken plastik bir bükme plakası vardır. Kullanabilir veya üzerinde metal bir plaka yapabilirsiniz.
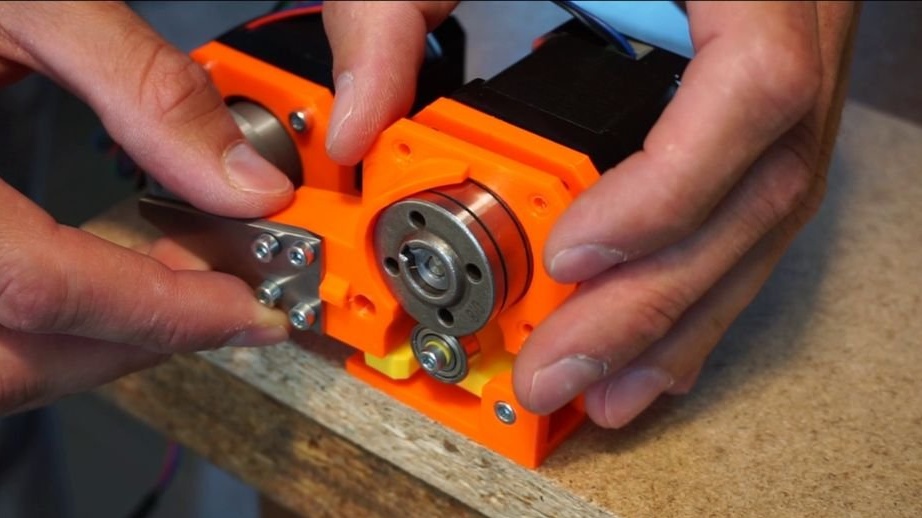
Ardından, tel kılavuzunun plastik kısmını alın ve dört M3 somununu arka tarafındaki deliklere takın. Şimdi bükme plakasını M3x20 cıvatalarla vidalayın. Tel kılavuzunu besleme mekanizmasının motor çerçevesinin önüne yerleştirin ve dört M3x12 cıvata ile motora sabitleyin. Bükme plakasının konumunu ayarlayın. Tam olarak bükme başlığının merkezinde olmalıdır.
Broş hazır. Düz bir kablonuz varsa, şu anda kabloyu kullanabilirsiniz. Aksi takdirde, bir doğrultucuya ihtiyacınız vardır.





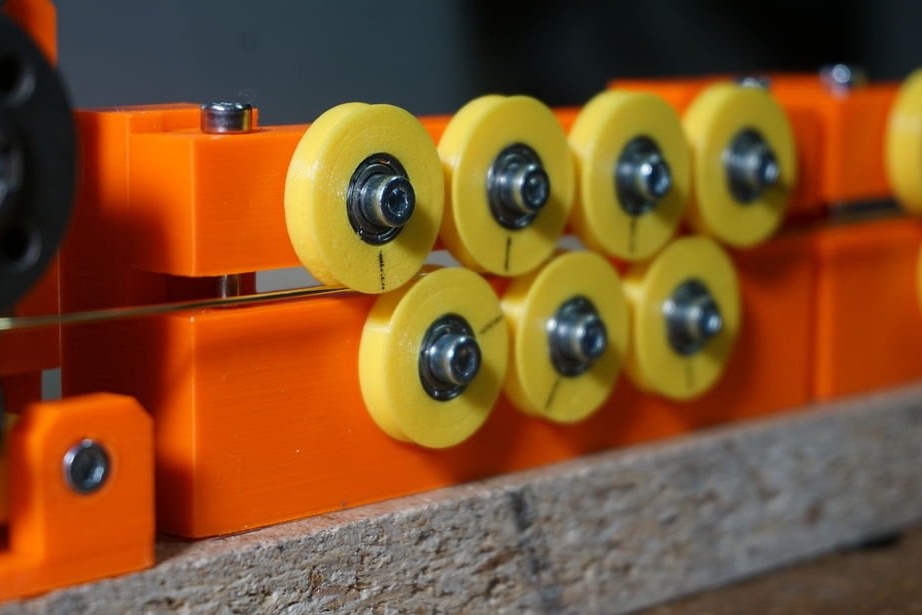
Beşinci Adım: Broach
Tel genellikle bobin formunda sağlanır. Teli bükmek için önce düzeltmeniz gerekir. Doğrultucu, telin doğru gerginliğini sağlamak için birbirine bastırılabilen 7 silindirden (üstte 4 ve altta 3) oluşur. Ayrıca bükme sırasında telin bükülmesini önler.
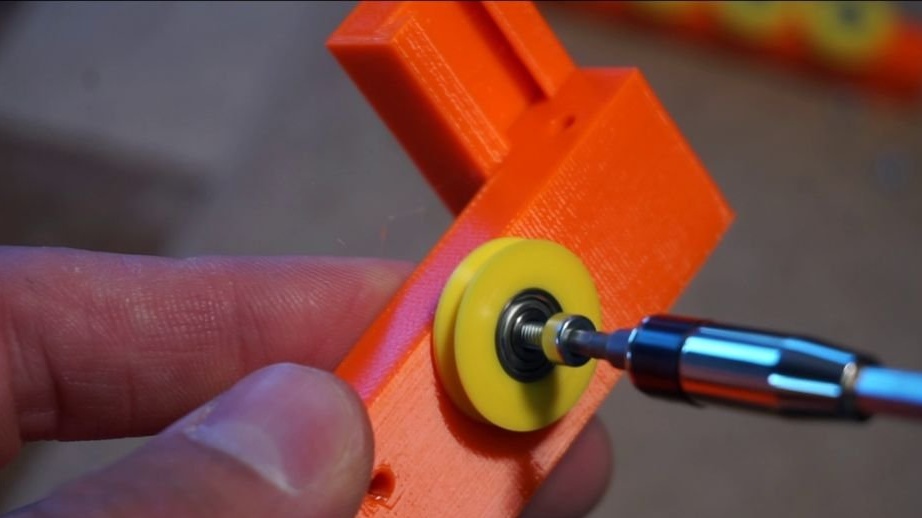
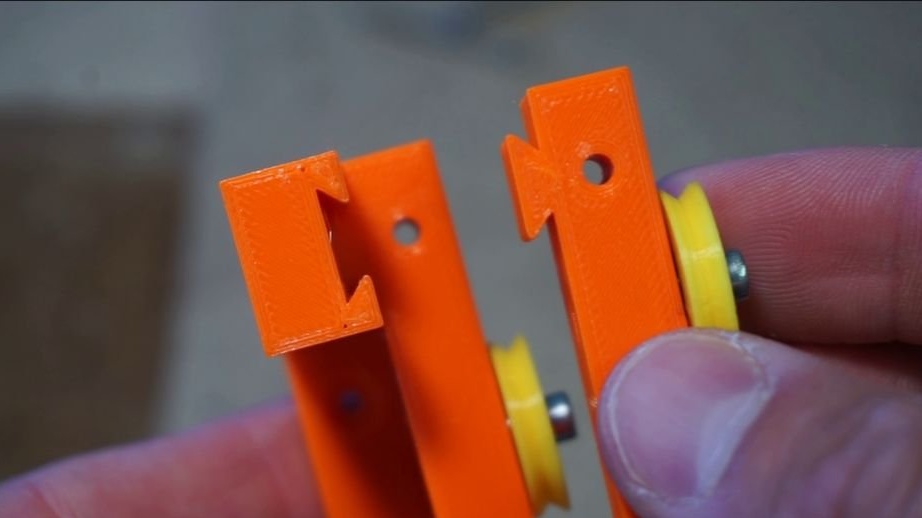
Tertibatı makaralı tekerleklerle başlatın. İlk önce yatağı 3x10x4 mm'lik plastik silindir gövdesine bastırmanız gerekir. M3x12 cıvatasını silindirin diğer tarafına, M3 rondelasını da takın. Yıkayıcı, tekerleğin şasi üzerinde sürtünmesini önleyecektir. Tüm silindirleri alt ve üst çerçeveye vidalayın. Her iki çerçeveyi de bağlayın. Çerçeveleri iki M3x40 cıvatayla sabitleyin.
Makaralı rulmanlarda biraz tasarruf edebilirsiniz. Straightener_Roller yerine Straightener_RollerNoBearing parçasını yazdırın. Ancak performans biraz daha kötü olacak.
Daha da iyi sonuçlar için arka arkaya 2 düzleştirici kullanın.




Altıncı Adım: Bobin Tutacağı
Makara tutucu, teli tutan ve makaradan çözülmesini sağlayan basit bir silindirdir. Dört adet 3x16 vida ile tabana vidalayın.
Yedinci adım: Bağlanın
İlk olarak, bükme teli makineye beslenmelidir. Master, bobin şeklinde 0.8-1mm pirinç tel kullanır.
Tel bobinden silindirlere geçer. Sadece teli silindirlerin arasına yapıştırın. Sonra şişten geçer.Besleme mekanizmasının konumunu, oluk tel kılavuzunun yüzeyi ile aynı hizada olacak şekilde ayarlayın. Ara vitesteki kolu bastırın ve teli besleyiciden bükme plakasına itin. Kolu bırakın ve besleme mekanizmasına bastırın. Şimdi teli bükme kafasına itmek için besleme mekanizmasını manuel olarak kaydırabilirsiniz. Cıvataları sıkarak silindirler üzerindeki gerilimi dikkatlice ayarlayın. Silindirler serbestçe dönmemelidir, ancak tel düzgün hareket etmelidir.
İkinci olarak, elektronik Denetleyici de bağlı olmalıdır. Master, CNC ve iki A4988 step motor sürücüsü ile klasik Arduino UNO'yu kullanıyor. Besleme motoru Z eksenine ve bükme kafası motoru X eksenine bağlanmıştır Sürücüler mümkün olan en yüksek doğruluk için yapılandırılmıştır - adım sürücülerinin altındaki 3 jumper'ın hepsi yerleştirilmiştir. Her şey bir 12V 3A güç kaynağına bağlanmalıdır.

Sekizinci Adım: Bellenim
Şimdi makineyi çalıştırmayı deneyebilirsiniz. Master kullanımları GRBL ile birlikte cncjs. Freze makinesinde çalışmak üzere tasarlanmıştır, ancak her türlü CNC için harika çalışır. GRBL, Arduino UNO'ya kurmanız gereken yazılımdır. Parametreleri ayarlamak için iyi bir cncjs web istemcisi vardır. Bilgisayarınıza Arduino ve cncjs üzerine GRBL kurun.
Kurulumdan sonra, makineye bağlanmanız ve Z +/- veya X +/- düğmelerine basarak çalışmasını kontrol etmeniz gerekir.
Şimdi kalibre etmeniz gerekiyor: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Bu, kodda belirtilen sayının motor hareketine nasıl dönüştürüleceğini belirleyen bir değerler kümesidir. Örneğin, Z eksenini 30 olarak ayarlarsanız, aslında besleyiciden 30 mm tel iteceği anlamına gelir.
Kalibrasyonu bulduk, şimdi bükme kafasını sıfır konumuna ayarlamanız gerekiyor.
Bükme başlığının hareketi, bükme başlığının iyi bilinen sabit konumu ile belirlenir. Bu durumda, kafadaki bükme piminin sola baktığı konum budur. Fotoğrafa bakın.
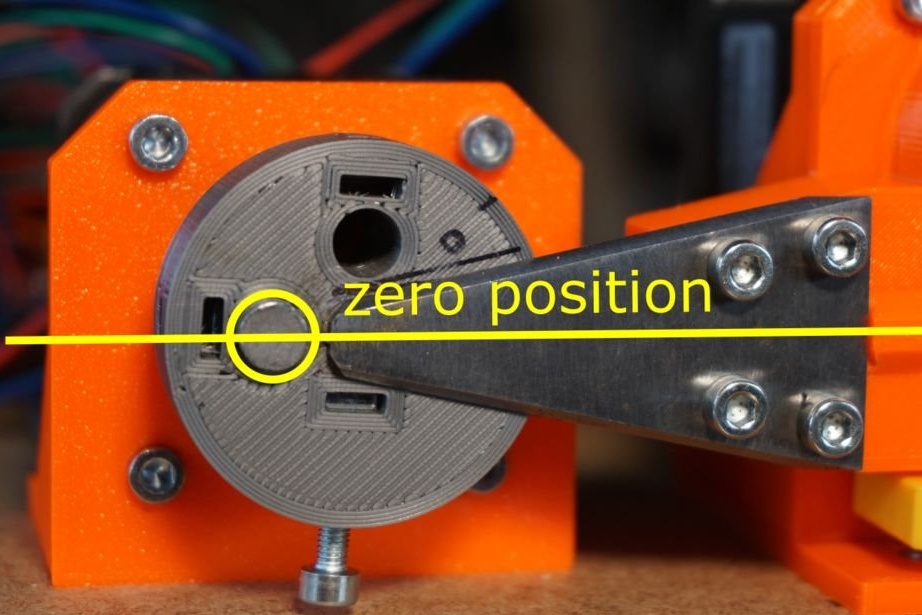
Aynı pozisyona geri dönebilmek için kafadaki bu sıfır konumunun not edilmesi tavsiye edilir. Sıfır pozisyonunu belirlemek için besleme mekanizmasına gerek yoktur, çünkü daima mevcut pozisyona göre hareket eder.
Şimdi bir Gcode örneğine bakalım. Şöyle görünüyor:
G91
G1 Z1
G90
G1 X2
G1 X-6Ve işte her değer ne için yazılmıştır:
G91 - göreceli koordinatlar kullanın (Z ekseni boyunca herhangi bir hareketten önce gereklidir)
G1 Z1 - besleme 1 mm tel
G90 - mutlak koordinatlar kullanın (X ekseni boyunca herhangi bir hareketten önce gereklidir)
G1 X2 - bükme kafasını 2 konumuna çevirin (bu numaranın birimleri yoktur)
G1 X-6 - bükme kafasını -6 konumuna çevirin
Adımları 100 kez tekrarlarsanız, bir yay bükme kodu alırsınız. Daha fazla kaynak dosyası aşağıda bulunabilir.
heks-inner.gcode
heks-outer.gcode
spring.gcode
Makine hazır. Ama usta hala onu geliştirmek için çalışacak.
Böyle bir makineyi üretmenin tüm süreci videoda görülebilir.