



Köpük kesici, uçaklar için parçalar yapmak için harika bir araçtır. Bu makine CAD için aerodinamik profilin herhangi bir şeklini doğru bir şekilde kesmenizi sağlar.
Makinede iki kılavuz arasına gerilmiş bir nikrom tel vardır. Akım telden geçirilir, tel ısıtılır ve kılavuzlar hareket eder ve konik kanatlar gibi karmaşık konturları keser. Her eksen, mil, GT2 kayışı ve kasnaktan bir step motor tarafından tahrik edilir. Kesme kuvveti minimal olmalı ve yapı, destekler arasında gerilen telin gerginliğine dayanacak kadar sert olmalıdır.
Bu, her iki tarafta farklı şekilleri aynı anda kesebilen gerçek bir 4 eksenli makinedir, bu nedenle sorun, dört bağımsız eksenin aynı anda nasıl kontrol edileceğidir. Birçok öğretici, 3D yazıcılar gibi 3 eksenli makinelere odaklanır, ancak kolayca temin edilebilen parçalar ve açık kaynak yazılım kullanarak 4 eksenli bir makine oluşturma konusunda yeterli dokümantasyon görünmemektedir. Usta kullanarak benzer projeler yapan birkaç kişi buldu Arduino ve Grbl ve kendi makinesini yapmaya karar verdi.
Araçlar ve malzemeler:
- Kontrplak (12mm);
-Metal çubuklar;
- Kurşun vida (M8 x 600 mm);
- Motor bağlantısı M8-M5 (kılavuz vida için M8 ve motor mili için M5);
-Arduino Mega 2560;
-RAMPS 1.4;
-Adım motorları (her eksen için bir adet);
-A4988 Step sürücü (her step motor için bir adet);
- Arduino + Rampalar için 12V güç kaynağı;
-Çeşitli güç kaynağı (Sıcak tel modlu Lipo şarj cihazları);
-Nikrom tel;
Birinci Adım: Yazılım
4 eksenli bir CNC oluşturmanın zor kısmı G kodunu oluşturmak ve makineyi kontrol etmek için yazılım bulmaktır. Bir yazılım araması, Marginally clever tarafından geliştirilen https://www.marginallyclever.com/2013/09/how-to-build-a-4-axis-cnc-gcode-interpreter-for-arduino/, Arduino Mega 2560 ve CNC Rampaları 1.4 ekranı.
Bazı bilgiler aşağıdaki yazarlar tarafından kullanılmıştır: RcKeith ve rcgroups.com
Grbl Hotwire Controller.zip
GRBL8c2mega2560RAMPS.zip
FoamXL 7.0.zip
İkinci Adım: Makine Montajı
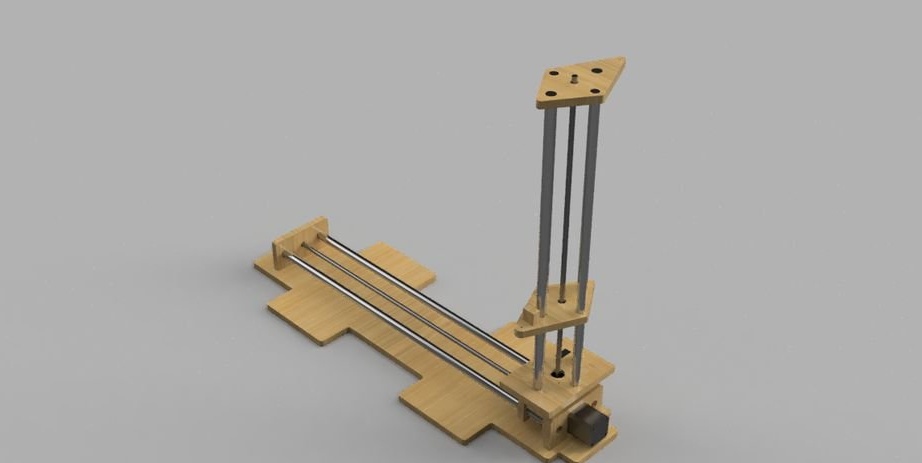
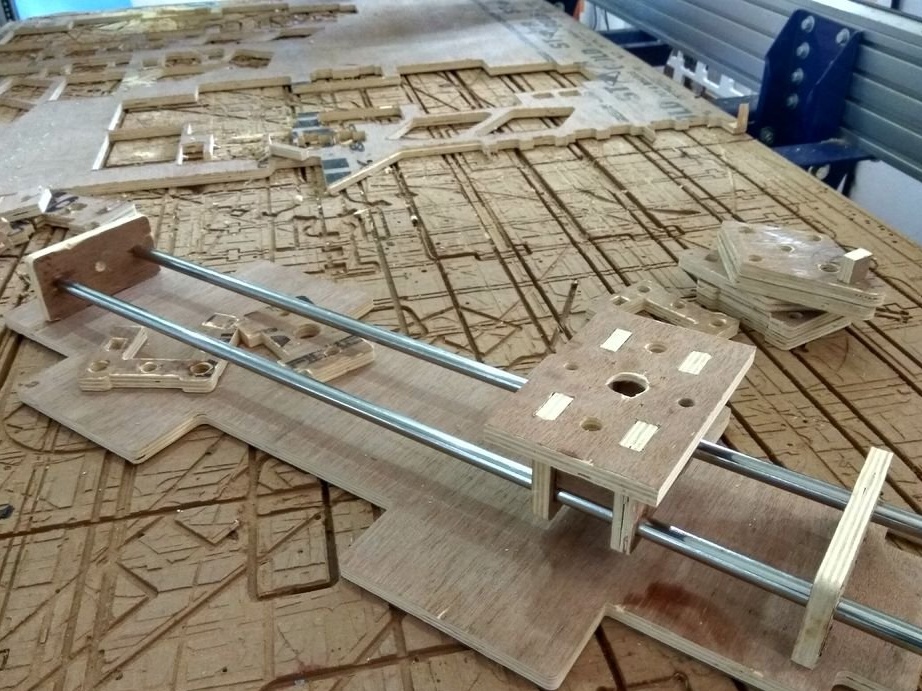
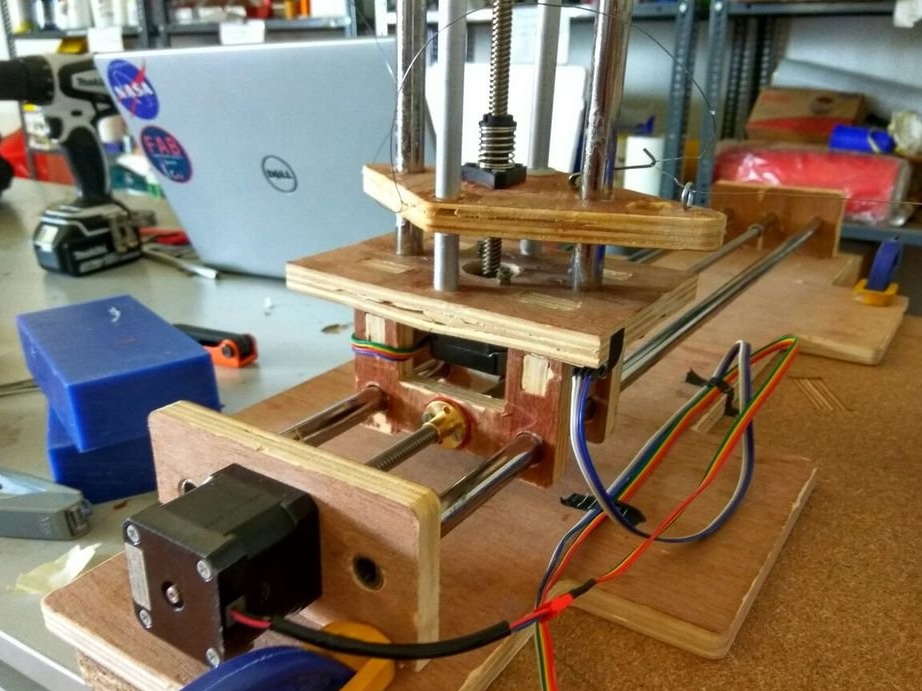
Tasarım 12mm kontrplaktan yapılmıştır, doğrusal montaj kontrplak sürgülü bloklarla 1/2 inç çapında çelik borulardan yapılmıştır. Kayar blokların tasarımı doğrusal bir yatak veya kovan takılarak geliştirilebilir.Master bir kurşun vida kullandığından, rulman olmadan sürtünmenin üstesinden gelmek için yeterli torka sahiptir. İki çelik boru, kılavuz bloğu aynı eksende destekler ve tutar.
Dikey sütunlar, yatay kılavuz bloğun üstüne yerleştirilir. Dört borusu vardır.
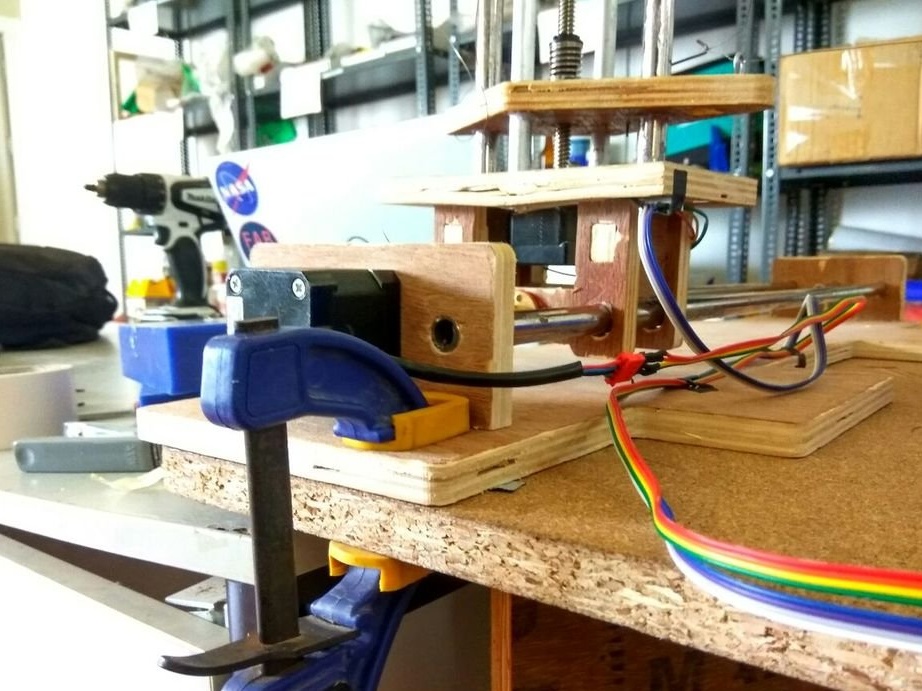
Tahrik vidası, esnek bir bağlantı kullanılarak step motoruna takılır. Bu, milin ve vidanın hafifçe yanlış hizalanmasına yardımcı olur. Dikey, geleneksel bir step motor ve debriyaj ile satın alınabilen veya değiştirilebilen yerleşik bir kurşun vidaya sahip bir step motora sahiptir.
İki makine sehpası aynıdır. Taban, makineyi masaüstüne monte etmek için bir yer sağlar.


Not. Kaymalı yataklar kullanılırken, malzemeye bağlı olarak, “yapışma ve kayma” adı verilen bir fenomen oluşabilir. Bu, hareketin düzensizleşmesine ve titreşimlere neden olabilir. Ayrıca, step motor kullanırken aşırı yüklere ve atlanan adımlara yol açarak tıkanmaya neden olabilir.
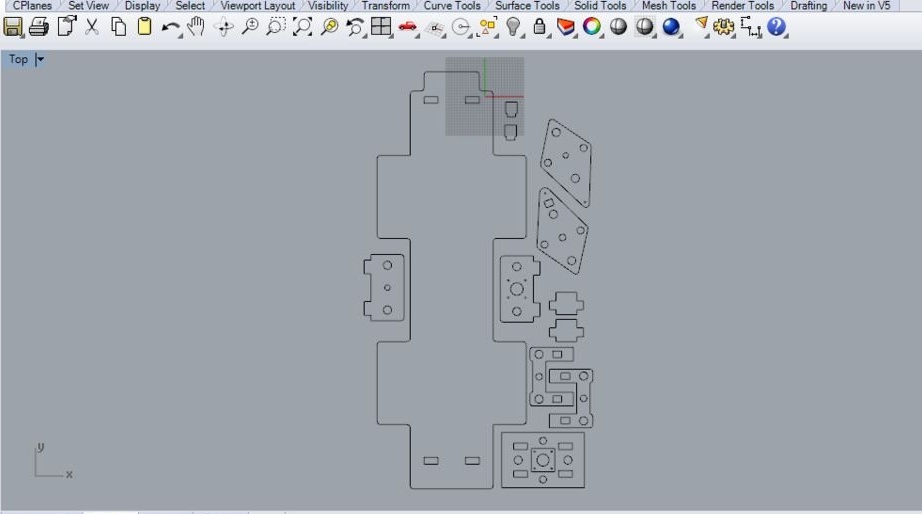
Foamcutter_base.dxf
Üçüncü Adım: Elektroniği Bağlayın
Bir sonraki adım elektronikleri bağlamak, motorları hareket ettirmek ve makineyi kurmaktır. Rampa platformuna bağlanması gereken 4 step motor vardır. Yeterli aks hareketi sağlamak için teller tamamen döşenmelidir.
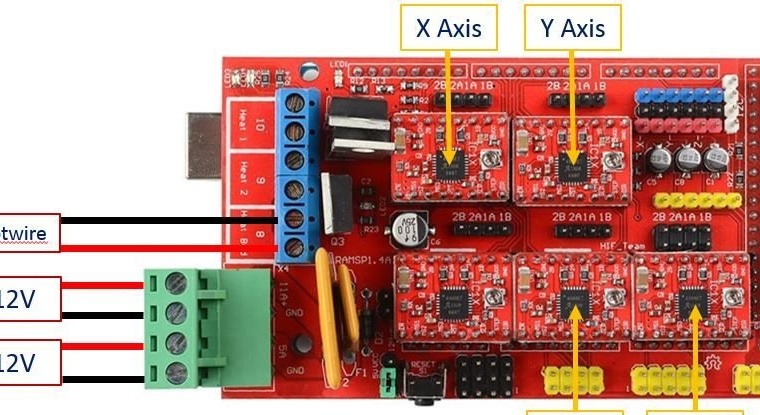
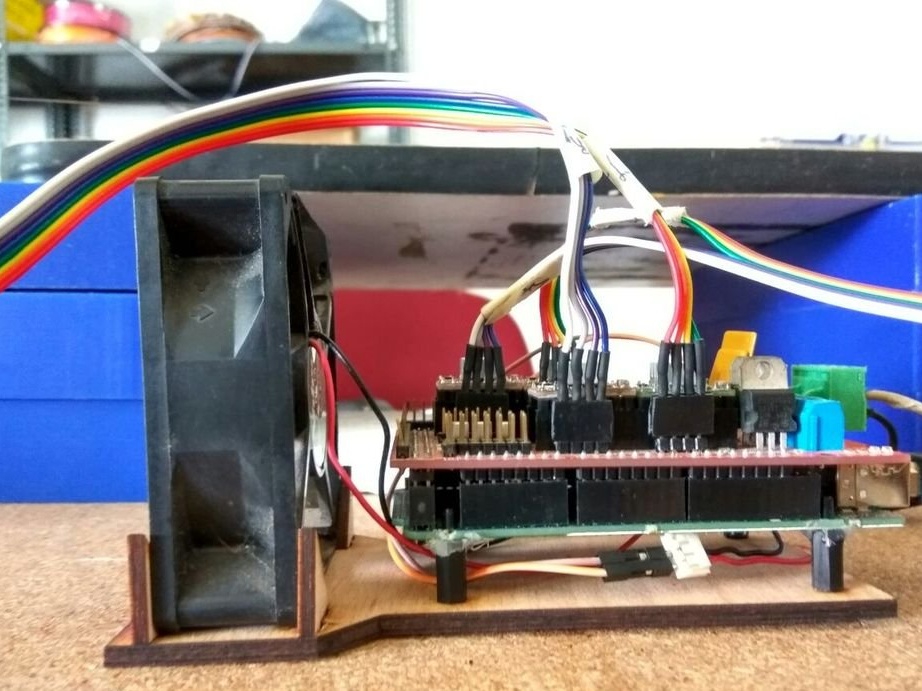
Tüm kablolar, Arduino Mega2560 için bir CNC ekran olan Rampalar kartına bağlanır. Rampa, A4988 gibi 5 adede kadar step motor sürücüsünü destekleyebilir. Usta Nema 17 motorlarını kullanıyor.
Bir Rampa kartına kurmadan önce, A4988 yongasının doğru yönlendirildiğinden emin olun. Her bir step motor 2 A'ya kadar çekebilir, step motor sürücüleri ısı dağıtımı için radyatörler ile donatılmıştır. Kart ayrıca, D8 pimine bağlanan telin sıcaklığını kontrol etmek için bir MOSFET 11A'ya sahiptir. Kartın tüm bileşenleri ısıtılır, uygun soğutmanın sağlandığından emin olun.
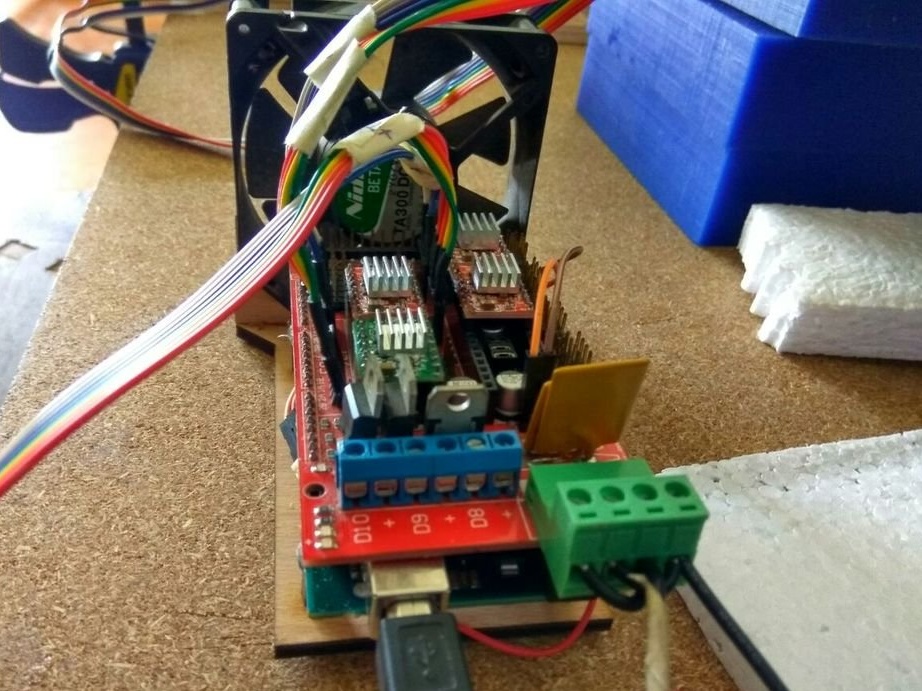
Sistem açıldığında, step motorlar bir tutma pozisyonunu korumak için akım çekmeye devam eder. Step ve MOSFET sürücüleri gibi bileşenler çalışma sırasında çok ısınabilir. Aktif soğutma olmadan rampaları kullanmayın.
Ana, Arduino ve Rampalar için tabanı lazerle keser ve kart için aktif soğutma sağlamak için bir 12V fan bağladı.
Dördüncü Adım: Kurulum
Her CNC çalışmaya başlamadan önce uygun şekilde yapılandırılmalıdır. Adım motorları bir açık döngü sisteminde kullanıldığından (geri bildirim olmadan), taşıyıcının adım motorunun her bir devri ile ne kadar yol alacağını bilmeniz gerekir. Motor devri başına adım sayısına, milin eğimine ve kullanılan mikro geçiş seviyesine bağlıdır.
steps_per_mm = (motor_steps_per_rev * sürücü_microstep) / thread_pitch200 rpm'lik bir eğime sahip bir step motor kullanır. A4988 sürücüsü tarafından 1/16 mikro adımda tahrik edilir, 2 mm'lik artışlarla bir kurşun vida ile.
Adım_başlığı_mm = (200 * 16) / 2 = 1600Master'ın kullandığı vida çift taraflı olduğundan, değer yukarıda belirtilenin yarısı, yani “800” olacaktır. Vida dört aşamalı ise, değer yukarıdakilerin dörtte biri olacaktır.
Mega 2560'ı Grbl8c2MegaRamps dosyasıyla yanıp söndükten sonra, seri port monitörünü açın ve Grbl ayarlar paneline erişmek için “$$” girin. Herhangi bir değeri değiştirmek için $ number = value girin. Örneğin, $ 0 = 100 Makineyi kurduktan sonra, makinenin kontrol cihazında gösterildiği gibi tam değeri taşıdığından emin olun.
Beşinci Adım: Nikrom
Köpüğü kesmek için, ısınmaya dayanabilecek ve tüm uzunluk boyunca aynı sıcaklığa sahip olacak uygun bir malzemeden yapılmış bir kabloya ihtiyacınız vardır.
Nikrom uygun bir malzemedir. Kesim sırasında olukları azaltmak ve temiz kesme çizgileri sağlamak için mümkün olduğunca ince bir tel kullanmak en iyisidir. Kural olarak, tel ne kadar uzun olursa, uygulanması gereken gerginlik o kadar yüksek olur ve tel daha kalındır.
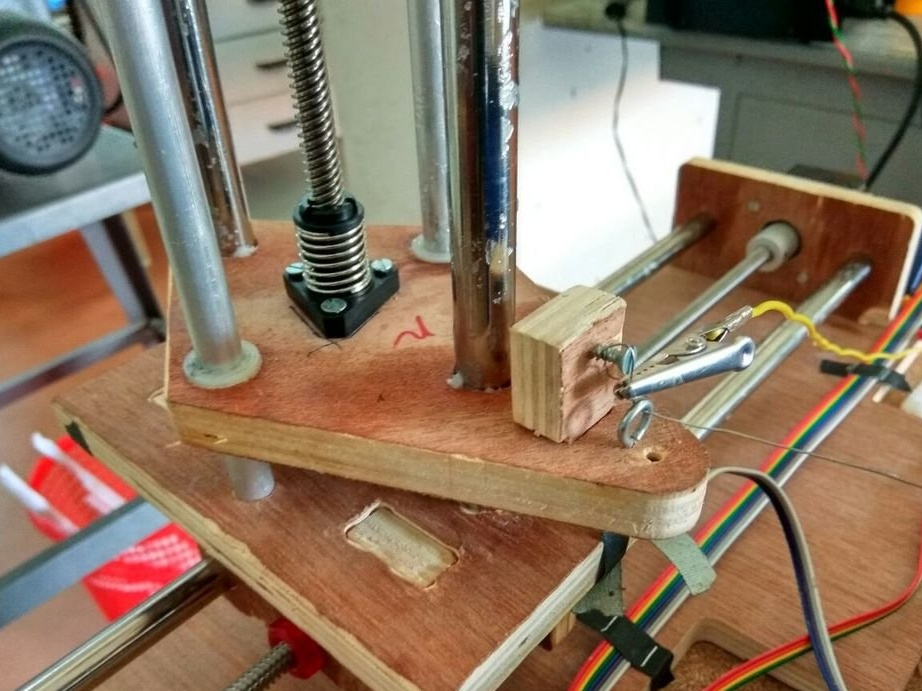
Bir sonraki adım, nikrom teli makineye bağlamaktır. 4 bağımsız eksene sahip olduğumuzdan, telin her iki ucunu da desteklere yapıştıramayız.Tel, ya bir yay vasıtasıyla ya da uçlara tutturulmuş bir ağırlık vasıtasıyla biraz uzamalıdır.
Kabloya sabit kuvvetli bir yay veya uçta asılı ağırlık ile sabit gerilim uygulanabilir. Sürekli kuvvetle bir yay elde etmenin ucuz bir yolu kullanmaktır Kimlik kartı bobinleri.

Altıncı Adım: Yazılım ve G-Kodu Üretimi
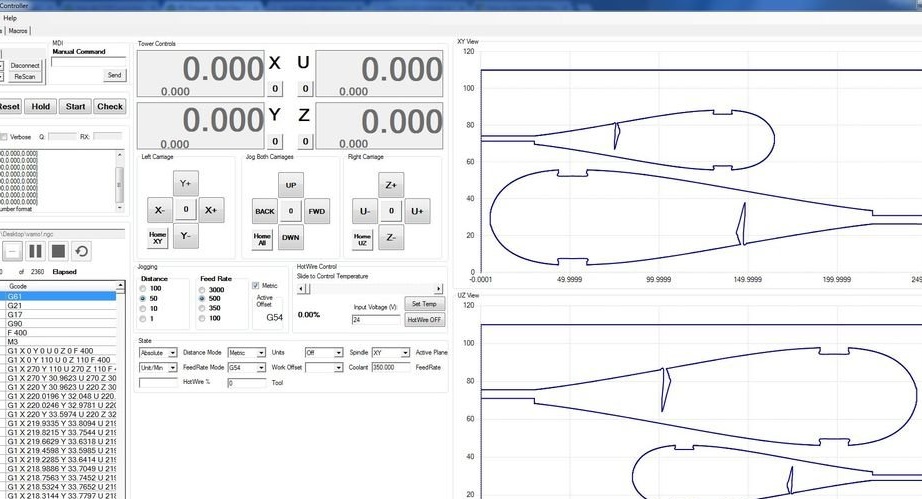
Grbl Hotwire Denetleyici
Sihirbaz, Garret Visser tarafından geliştirilen ve Hotwire tarafından Daniel Rassio tarafından kesilmek üzere uyarlanan Grbl kontrol panelini kullanıyor. Panel, tüm eksenler için bağımsız mod kontrolüne sahiptir. Bir görselleştirme aracı, bir "Gcode" grafiği ve kendi makrolarınızı kaydetme özelliği de vardır. Hotwire sıcaklığı, açmak / kapatmak için M3 / M5 ve manuel olarak veya yazılımdaki kaydırma çubuğunu kullanarak çıkış voltajını ayarlamak için S komutu “xxx” kullanılarak kontrol edilebilir. Sıcak tel “D8” çıkışına bağlanmalı ve hat bağlantılarındaki “11A” girişine bağlı bir güç kaynağı ile çalıştırılmalıdır.
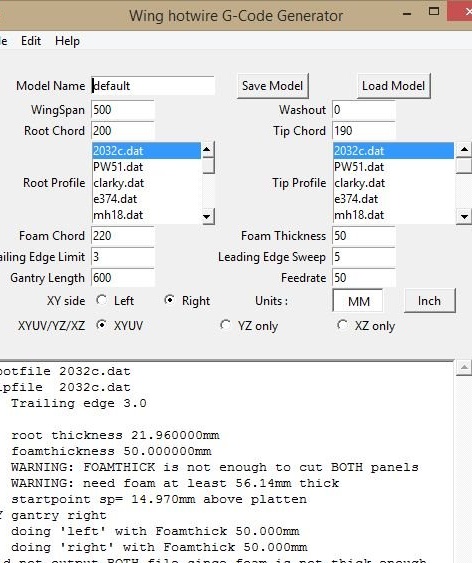
Kanat g kodu üreteci
Kanat g kodu üreteci uçak model kanatlarının sıcak kesimi için XYUV GY kodunu üretmek için kullanılan bir programdır. Python 2.7 üzerinde çalışır ve ayrıca LinuxCNC Axis arayüzü ile entegre olabilir. Ayrıca çevrimiçi bir sürümü var. Bu, kanadın çeşitli parametrelerini girmenizi sağlar. .Dat formatında aerodinamik profillerden oluşan bir veritabanı vardır. Yeni profiller aynı şekilde içe aktarılabilir.
Bu yazılımın kullanımı kolaydır ve malzeme tasarrufu için kanatları aynı köpük parçasına yerleştirmeyi destekler. Çıkış G kodu Grbl kontrol cihazı ile makineye gönderilebilir.
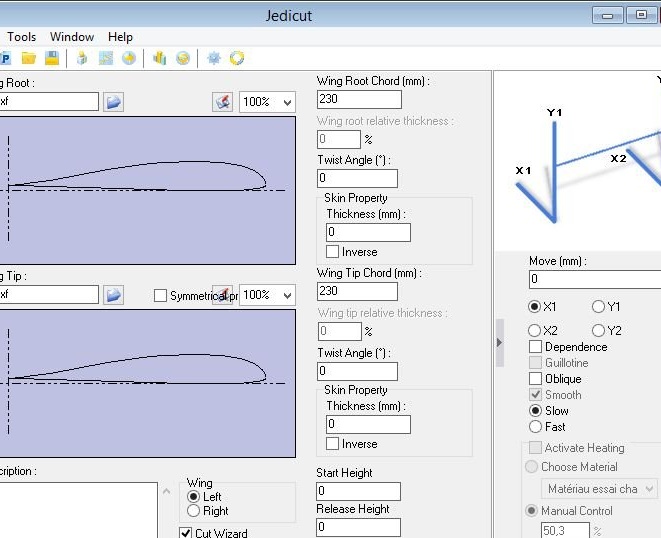
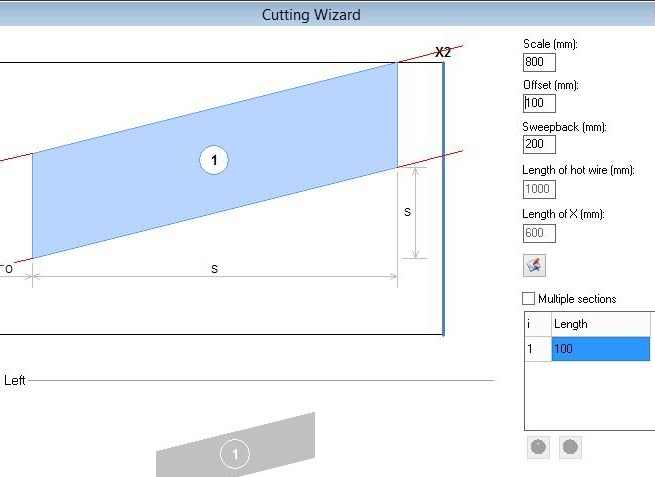
2.4 Jedicut
Jedicut - Bu hem CAD / CAM hem de makine kontrolörünün işlevlerini yerine getirebilen harika bir programdır. Ayrıca G kodu oluşturmak için bir eklenti de vardır. Bu yapılandırılması en kolay program değildir. Bazı seçenekler ve hata mesajları Fransızca'dır, ancak bir süre bununla çalışırsanız, çalışmasını sağlayabilirsiniz.
Wing'in G kodu, Grbl üzerinde sorunsuz bir şekilde çalışan mutlak modda G kodları üretir, ancak Jedicut artımlı modda G kodu üretir. Usta ilk başlangıçta, araba basitçe ileri geri hareket ettiğinde zorluk çekti. Bu durumda, başlıktaki gereksiz satırları kaldırmak için G kodunu düzenleyin.
Hem Wing G kodu hem de Jedicut, başlıkta bazı desteklenmeyen Grbl kodlarıyla G kodu oluşturur. Bu tür hatalar meydana geldiğinde kontrolör monitörde gösterilecektir. G kodunu düzenleyin ve gereksiz kod satırlarını silin.
Her iki programla da çalışan G kodları dahildir, denetleyiciyi kontrol etmek için kullanın.
Jedicut.rar
winggcode.rar
Yedinci adım: besleme hızını ve sıcaklığı ayarlama
Geleneksel frezelemenin aksine tel eriterek köpük keser. Tel bir süre bir pozisyonda kaldığında, çevredeki materyal erimeye devam eder. Bu kesimin oluğunu arttırır ve boyutta yanlışlıklara neden olur. Kesimin genişliğini etkileyen iki değişken vardır.
Kesme besleme hızı.
Tel sıcaklığı.
Kesme besleme hızı, telin malzemeyi, tercihen mm / dakika cinsinden kesme hızıdır. Hız ne kadar yüksek olursa, yuva o kadar küçük olur, ancak gerekli sıcaklık o kadar yüksek olur ve teldeki gerilim yeterli olur. İyi başlangıç hızları 350 ila 500 mm / dakikadır.
Telin sıcaklığı köpüğün erime sıcaklığından biraz daha yüksek olmalıdır. Sıcaklık, telden akan akım tarafından kontrol edilir.
Kesme besleme hızını optimize etmek için telin PWM kontrolünün doğru anlarda ısınmasına izin veren bir yazılım vardır. Telin sıcaklığı, mevcut zamanın direncinin karesi ile belirlenir.
Özel bir hesap makinesigerekli tüm hesaplamaları yapabilirsiniz.
Sekizinci Adım: Makinenin Çalışması
İşlem, DXF dosyası olarak dışa aktarılan bir tasarımla başlar. Bu dosya daha sonra CAM yazılımına alınır ve bir G kodu olarak çıkar. Makine açılır ve kalibre edilir. Malzeme bir tezgah üzerine yerleştirilir ve başlangıç konumu ayarlanır. G-kod dosyasını çalıştırın ve cihazın tüm işleri sizin için nasıl yaptığını görün.
Master'a göre, makinenin üretimi kolaydır ve uçak modellerinin çalışmasını kolaylaştırır.




Aşağıdaki videoda, makinenin bir örneğini görebilirsiniz.