Usta uzun zamandır uçak modelleri ile ilgileniyor. İlk başta bir uçak modeli, daha sonra quadrocopters oldu. Bu makalede, sihirbaz bir quadrocopter için hangi malzemelerin seçileceğini ve kontrplaktan nasıl bir çerçeve yapılacağını söyleyecektir. Kısa bir demo videosu izleyelim.
Quadrocopter yapmak için usta aşağıdakileri kullandı
Araçlar ve malzemeler:
- Kontrplak kontrplak;
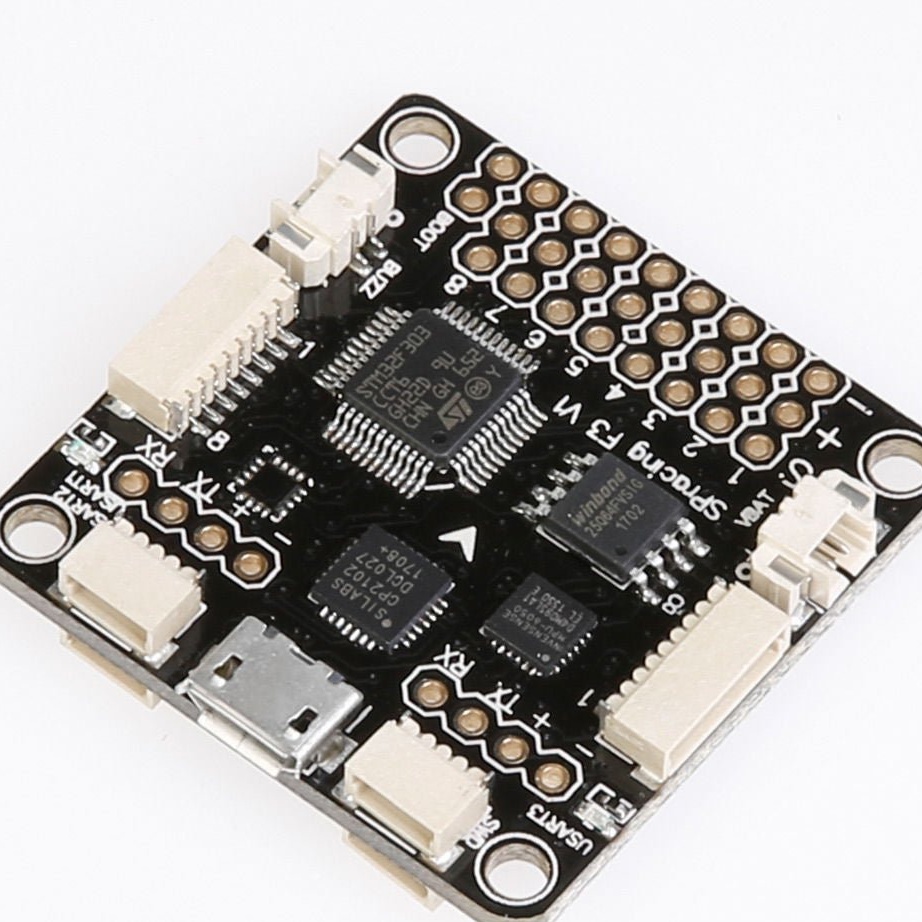
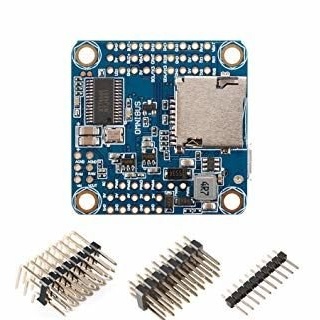
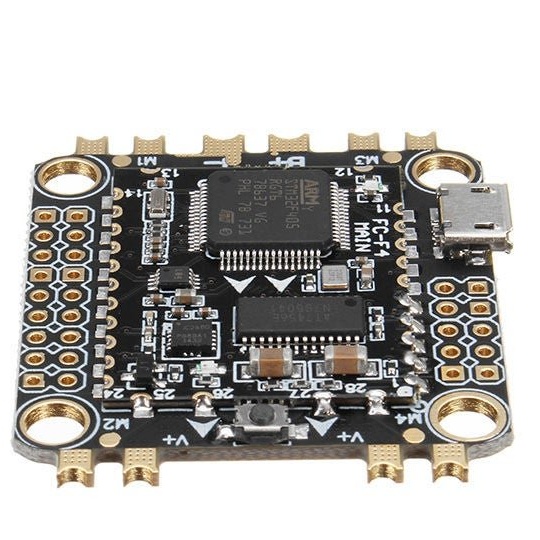
-Omnibus F4 kontrol cihazı, SP Racing F3;
-Mateck güç dağıtım kartı;
- Kontrolör HGLRC 28A BLHeli ESC - 4 adet;
- Motor Racestar BR2204 2600Kv Yarış Sürümü -4 adet;
- Pervaneler KingKong 5X4X3 - 4 adet;
- Alıcılı Flsky TH9X radyo modülü;
Akü Jeneratörleri 3800 mAh;
dayanıklı; - 16 adet;
-M3 vidalarını;
- tornavida;
Lehimleme aksesuarları;
-Nozh;
- CNC kesici;
Birinci Adım: Malzeme Seçimi
Çerçeve.
Genellikle çerçeve, fiberglas, karbon fiber, ahşap, alüminyum vb.
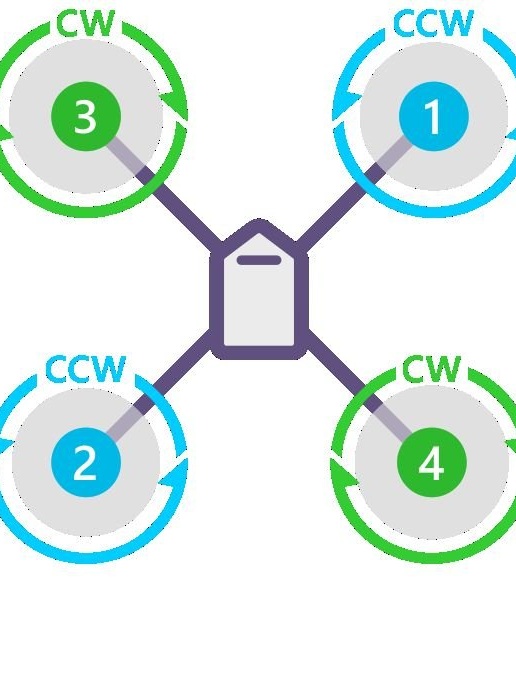
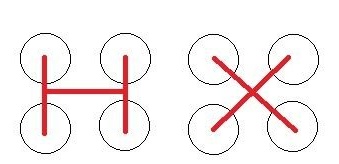
Bu gibi çerçeveler esas olarak H-formunda veya X-formundadır. X şekli stabilite ve manevra kabiliyeti arasında iyi bir dengedir. Efendinin yapacağı bu çerçevedir.

Denetleyici.
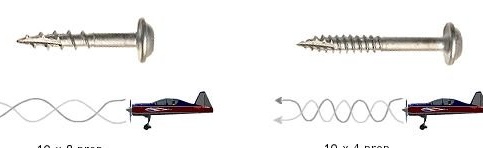
Kontrolör motorların çalışmasını kontrol eder. Şema, her motor tarafından üretilen torku nötralize etmek için tüm motorların zıt yönlerde döndüğünü göstermektedir. Kontrolör bir quadrocopterin beyni, temelde açı ve hızı sürekli olarak ölçmek için sensörlerini kullanan küçük bir bilgisayardır.
Uçuş kontrolörleri esas olarak işlemci özelliklerine göre sınıflandırılır.

Motorlar.
İki tip motor vardır: fırçasız motorlar ve fırçasız motorlar. Çoğu quadrocopter, hız ve tork gereksinimlerindeki değişikliklere çok hızlı yanıt verebilen fırçasız motorlar kullanır. Fırçasız motorlar için, özel elektronik hız kontrol cihazı (ESC).
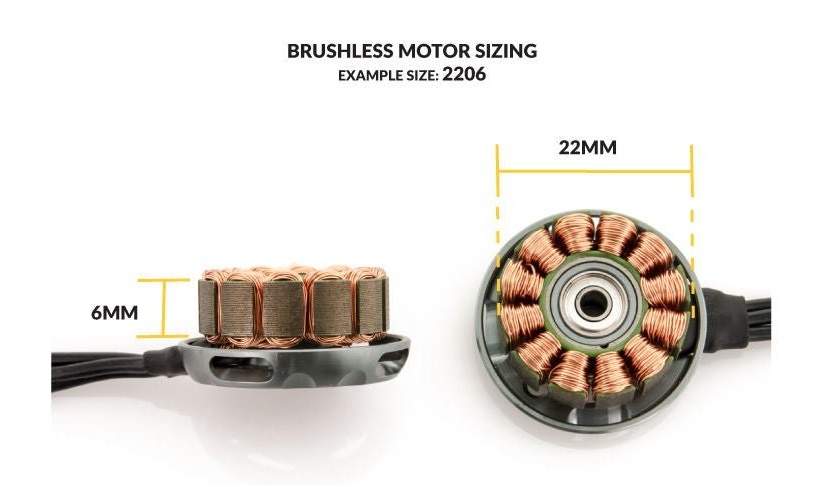
Fırçasız motorların boyutu 4 basamaklı bir sayı ile gösterilir - AABB. “AA” stator genişliğidir ve “BB” stator yüksekliği veya stator çapıdır, her ikisi de mm (milimetre) cinsindendir. Örneğin, Racestar BR2205'in çapı yaklaşık 22 mm ve yüksekliği yaklaşık 05 mm olan bir statoru vardır.
Aslında, stator ne kadar yüksek olursa, yüksek hızlardaki güç o kadar büyük olur ve stator ne kadar geniş olursa, düşük hızlardaki tork o kadar büyük olur.
Motorun KV değeri, sargılarına 1 volt uyguladığınızda motorun dönme hızını gösterir.Motor statorundaki bakır telin sarım sayısı ve mıknatısların manyetik kuvveti ile belirlenir.
Daha az sargı daha az direnç ve dolayısıyla daha yüksek devir demektir. Bu nedenle daha yüksek KV'ye sahip motorlarda daha az stator sargısı olma eğilimindedir.
KV, motorla hangi vidayı kullanabileceğinizi belirler. KV ne kadar düşük olursa, döndüğü vida o kadar büyük olur ve bunun tersi de geçerlidir. Daha yüksek bir KV'ye sahip bir motora daha büyük bir vida takarak kaldırma kuvvetini arttırmak mümkün değildir, çünkü tork gereksinimleri izin verilen gücün ötesine geçecek ve motor aşırı ısınacaktır.
Örneğin: BR2205 2600 kV motorlar 5x4 inç vidalarla çalışabilir ve BR2212 1000 kV motorlar 10x4.5 inç vidalarla çalışabilir
KV hiçbir şekilde motor gücü çıkışının bir göstergesi değildir; daha yüksek bir KV'ye sahip motorlar, daha düşük bir KV'ye sahip motorlardan daha güçlü değildir.


Elektronik hız kontrol cihazları (ESC).
Fırçasız motorların çalışmasına izin veren küçük elektronik hız kontrolörlerinin ortaya çıkmasıyla mini quadrocopters'teki son gelişmeler mümkün olmuştur. Elektronik hız kontrol cihazlarının çalışması, uçuş kontrol cihazından gaz kelebeği sinyalini almak ve motor devrini gerekli hızda tutmaktır.
Bu küçük cihazların içinde, bu kılavuzun kapsamı dışında olan bir dizi teknoloji çalışmaktadır. Satın alırken, hesaplanmış olandan en az% 20 daha fazla nominal anma akımı olan bir ESC seçin.


Pervaneler.
Pervaneler motorların mekanik enerjisini çekişe dönüştürür. Pervanenin boyutu ve şekli uçuş verimliliğinde büyük rol oynamaktadır.
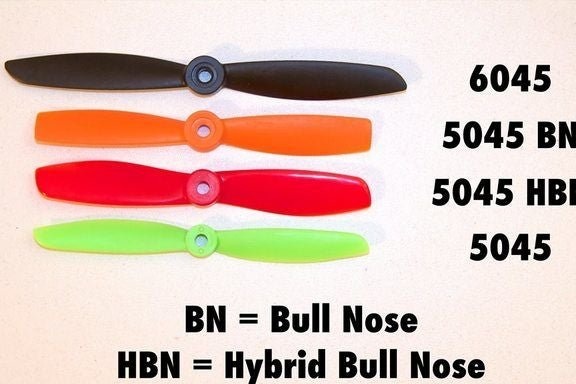
Üreticilerin kullandığı 2 tür format vardır: L x P x B | LLPP x B. Burada, L uzunluğu, P eğimi, B bıçak sayısıdır.
Pervaneler plastik kompozit, karbon fiber, ahşap, vb.Gibi çeşitli malzemelerden yapılabilir. Her malzeme türü benzersiz özelliklere sahiptir, örneğin, karbon fiber ve ahşap gerçekten serttir ve düzgün çalışması için bilinir ve bazı plastikler son derece dayanıklıdır. Mini quadrocopters'ta kullanılan vidaların çoğu plastik kompozitlerden yapılmıştır.
Kullanabileceğiniz pervanenin boyutu, çerçevenizin boyutu ve motorunuzun HF gücü ile sınırlıdır. Kural olarak, belirli bir itme oluşturmak için ne kadar pervane kullanabilirsiniz, o kadar etkili olacaktır. Mini quadrocopters için, 4-5 inçlik artışlarla 5-6 inç vidalar arasında değişir.
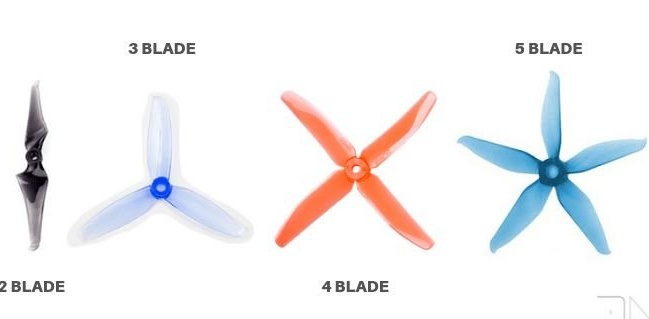
Bıçak sayısı çekişi ve enerji tüketimini etkiler. Daha fazla bıçak, daha fazla çekiş ve daha fazla enerji israfı olur.

Pil.
Şu anda çoğu dron, yaygın olarak Lipo piller olarak bilinen lityum polimer piller kullanıyor. ESC ve motor ile birlikte akü bir quadrocopter güç sistemidir.
Aküyü bir enerji deposu olarak düşünmeyin, motorlar çok kısa aralıklarla korkunç miktarda amper çekebilir. LiPo piller, her biri 3.7 V nominal gerilime sahip bir dizi hücredir. Daha yüksek bir voltaj gerekiyorsa, bu hücreler bir pil oluşturmak için seri olarak bağlanabilir. Seri bağlı piller “S” harfiyle ve “P” harfine paralel olarak işaretlenmiştir.
Seri olarak ne kadar fazla hücre bağlanırsa, voltaj o kadar fazla ve paralel o kadar fazla hücre, kapasitans o kadar yüksek olur.
Örneğin:
1S = 1 hücre = 3,7 V
2S = 2 hücre = 7,4 V
3S = 3 hücre = 11,1 V
4S = 4 hücre = 14,8 V
5S = 5 hücre = 18,5 V
6S = 6 hücre = 22,2 V
Kapasite miliamper veya “mAh” olarak belirtilir. Bu, bir pilin bir saat içinde verebileceği amper sayısıdır. Örneğin, 3S 2000 mAh pil 1 saat boyunca 2 A sağlayabilir. yani quadcopter 20A çekerse, uçuşu 2/20 * 60dk = 6 dakika sürecektir.
Nominal deşarj, aküden akım çekebileceğiniz maksimum hızı gösterir. Üstte "C" sayısı ile gösterilir. C derecesi ne kadar yüksek olursa, pilin verebileceği akım miktarı da o kadar fazla olur.
Örneğin, 2000 mAh 25C pil 2000x25 = 50.000 mA veya 50 A'ya kadar güç sağlayabilir.



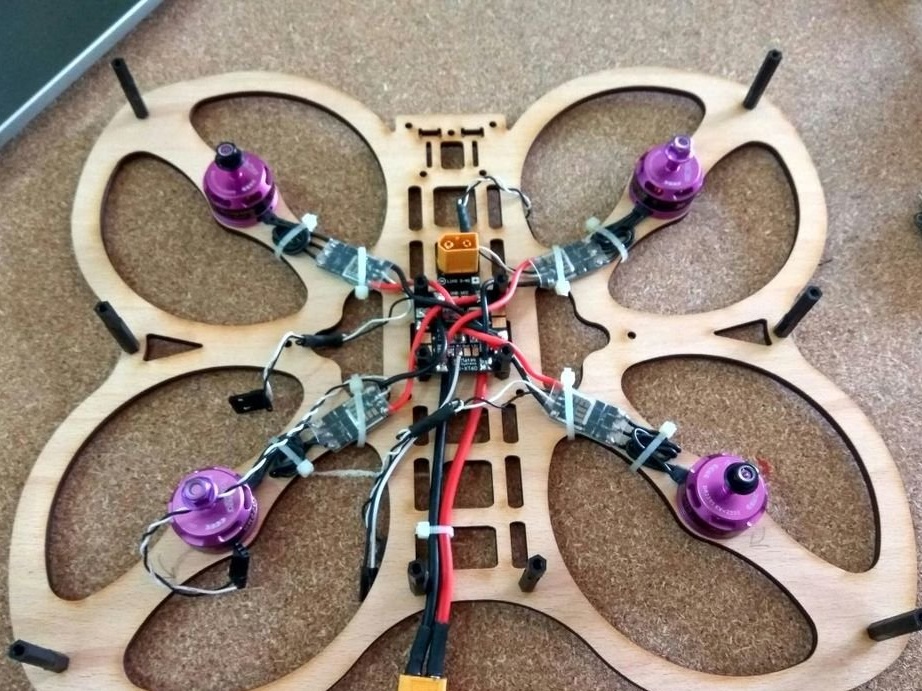
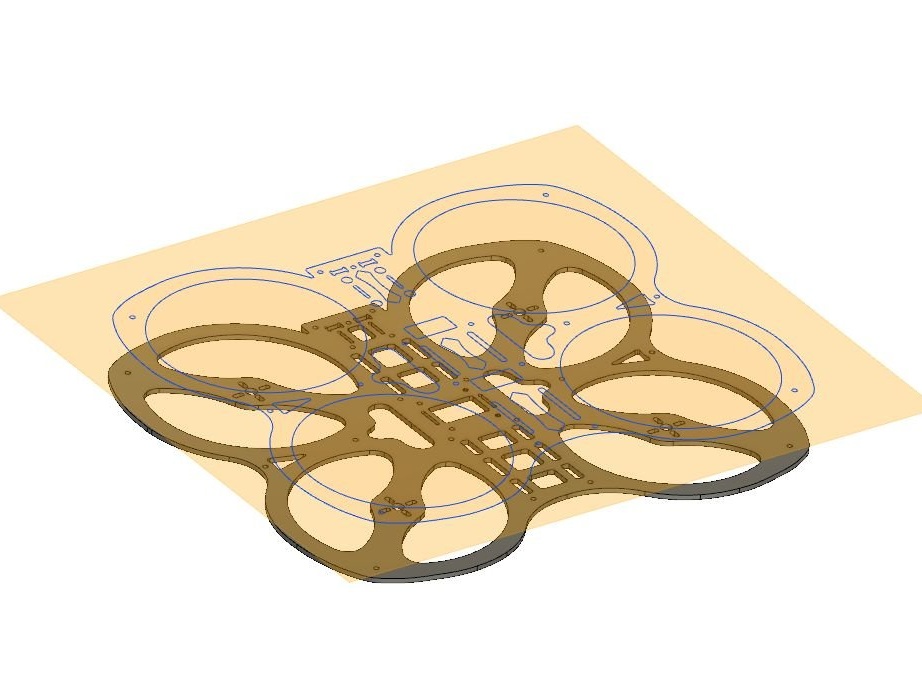
İkinci adım: Çerçevenin tasarımı ve montajı
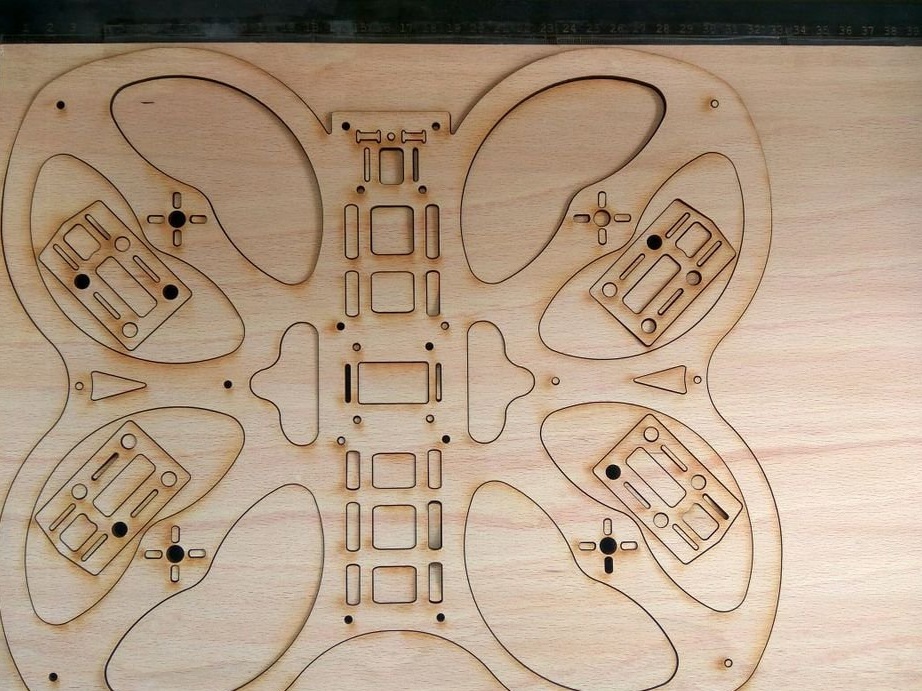
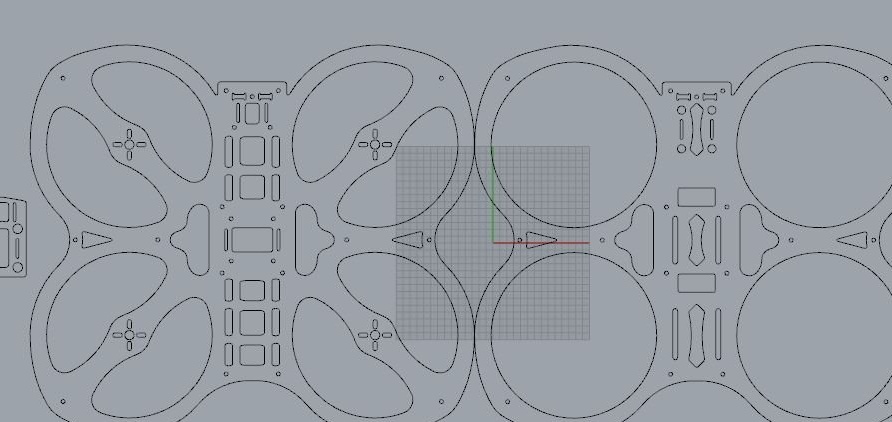
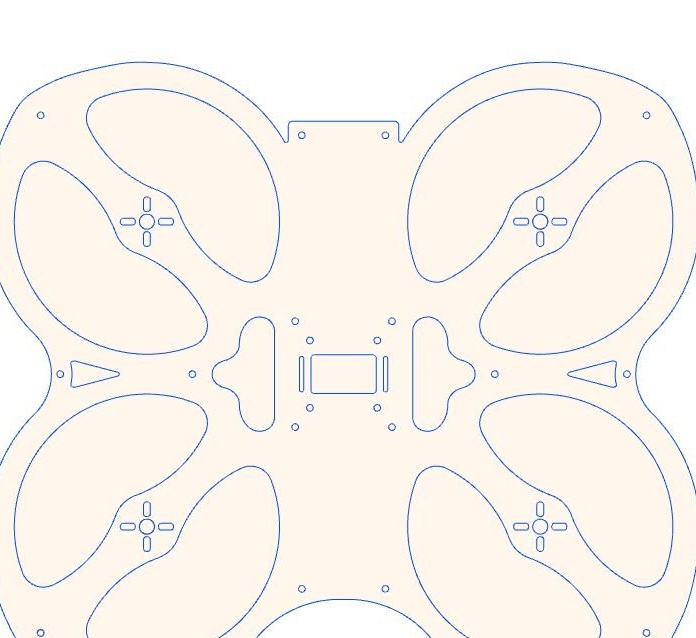
Çerçeve tasarımı, monarch kelebek şeklinden esinlenmiştir.Çerçeveye yukarıdan baktığınızda, iki kanat gibi görünür.
Sihirbaz tasarımı Fusion 360 ve Rhino CAD'de çizdi. Çerçeve boyutu yaklaşık 230 mm'dir, bunun nedeni bir motor göbeğinden diğerine çapraz mesafedir. En popüler şasi boyutları 210 mm, 250 mm vb. Şeklindedir. Şasi boyutunu ayarladıktan sonra motor bağlantılarını çizin.
Merkezi bina, uçuş kontrolörü, alıcı, pil vb. Dahil olmak üzere tüm elektronik parçaların monte edileceği yerdir. Orta noktada, birbirinden 30.5 mm mesafede 4 M3 delik vardır.
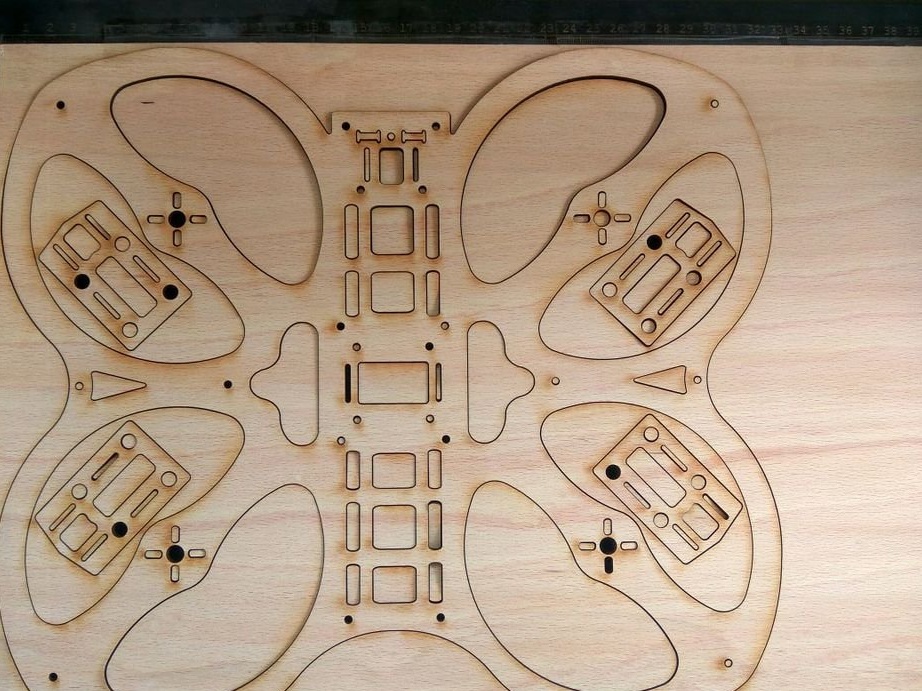
Öğe lazer kesim kullanılarak yapılır. Kesiciniz yoksa, atölyede kesim yapabilirsiniz. Kesim dosyası aşağıdan indirilebilir.
Dosya Tasarımı.rar









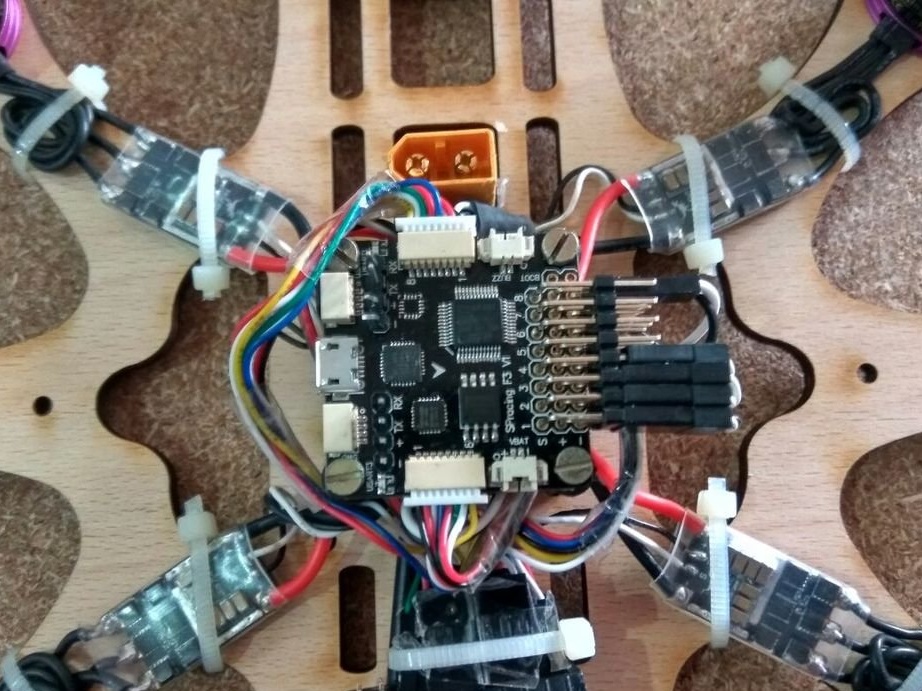
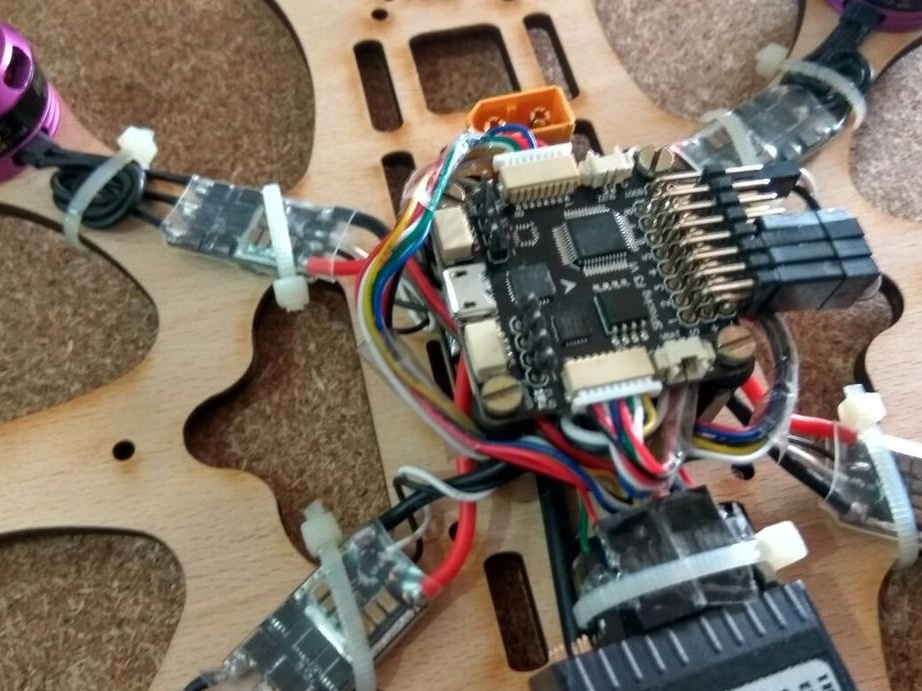
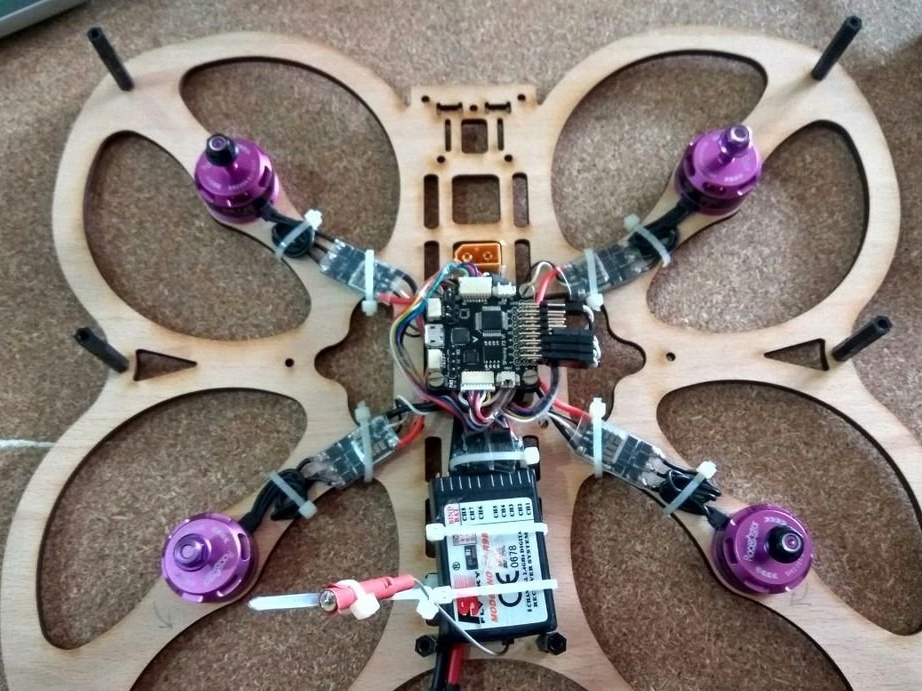
Üçüncü Adım: Yapı
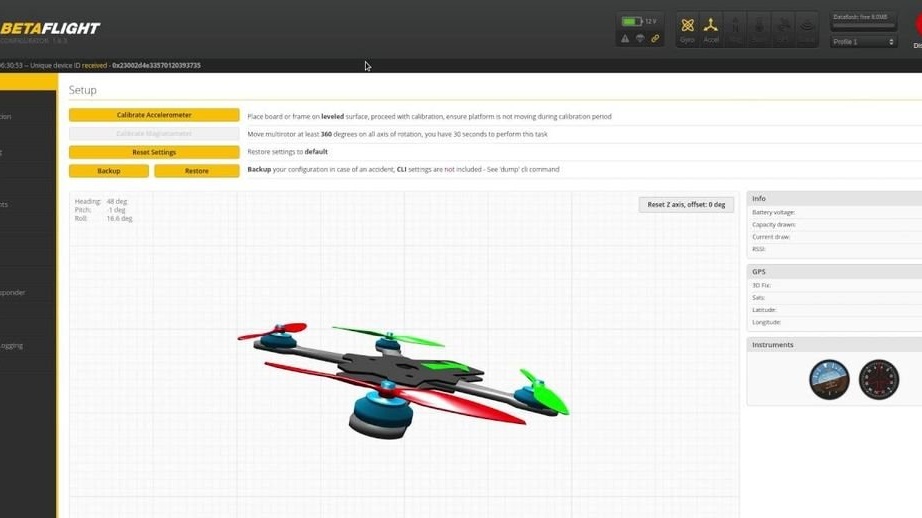
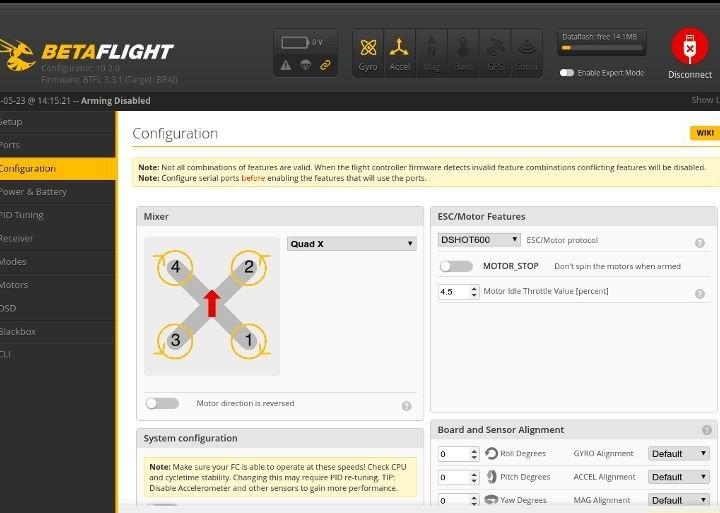
Şimdi bir quadrocopter kurmanız gerekiyor.
Öncelikle Betaflight ürün yazılımı ile kontrol cihazını flaş etmeniz gerekir. Ardından sensörü kalibre edin. Radyo modülünü bağlayın ve çalışıp çalışmadığını kontrol edin. Motorları X-çerçevesinin şemasına göre doğru dönüş yönü ile çerçeveye monte edin. Motor uçlarını ESC terminallerine lehimleyin ve ESC'yi brakete sabitleyin. Güç dağıtım kartını takın ve ESC pedlerini lehimleyin. Soler XT60 cihazını önce güç kablosuna, sonra da güç dağıtım kartına takın. Denetleyiciyi sabitleyin. ESC'deki kabloları uçuş kontrolörüne bağlayın. Alıcıyı çerçeveye monte edin. Üst kapağı takın.