


Bu makalede, Sihirbaz bize oyunculuk Lego 60193 Arctic Hava Taşımacılığı helikopteri nasıl yaptığını gösterecek model quadrocopter. Quadrocopter'in imalatındaki ana görev, uçan niteliklere ek olarak, mümkün olduğunca çok orijinal parçayı kurtarmaktı.
Quadrocopter'in çalışmasını gösteren kısa bir video görelim.
Yani, böyle bir quadrocopter üretimi için usta aşağıdakileri kullandı
Araçlar ve malzemeler:
-LEGO Şehir Arktik Helikopteri - 60193:
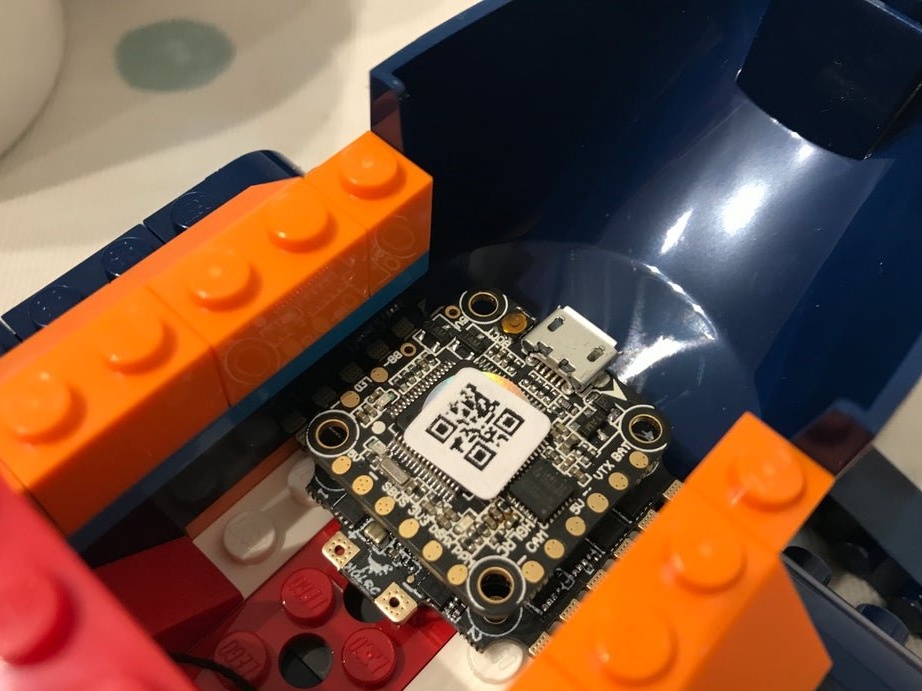
- Kontrolör ve ESC 20x20 mm, örneğin, HGLRC XJB F428 Micro F4 AIO OSD;
- Fırçasız motorlar - 4 adet;
-Propellery;
-Pil 950 mAh;
-Razemy;
seeing-;
Radyo modülü (verici ve alıcı);
-Krepezh;
-Nozh;
- Havya;
-Tutkal tabancası;
- tornavida;
-Drel;
Birinci Adım: Lego Build
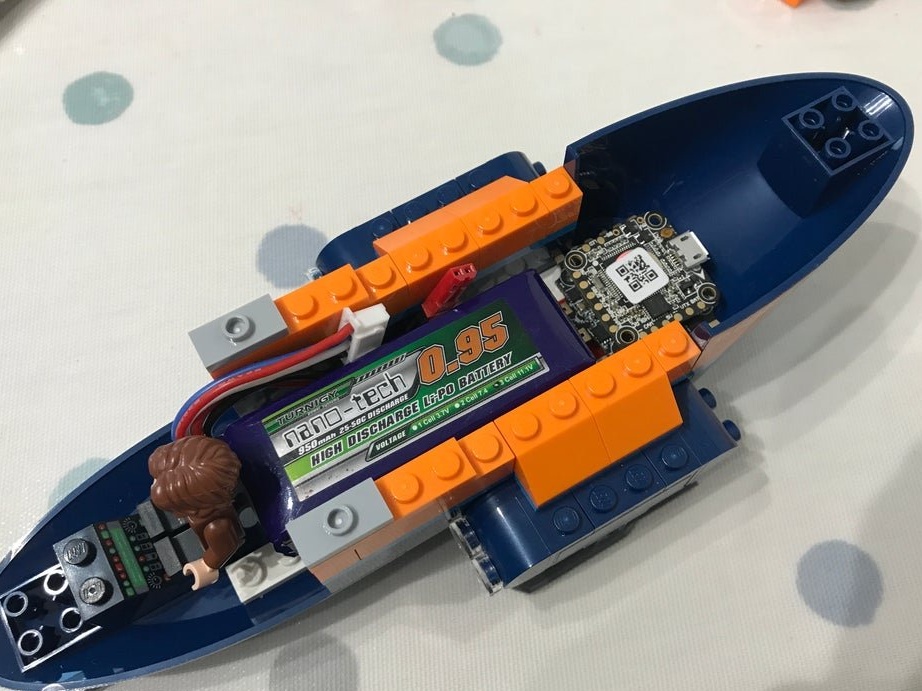
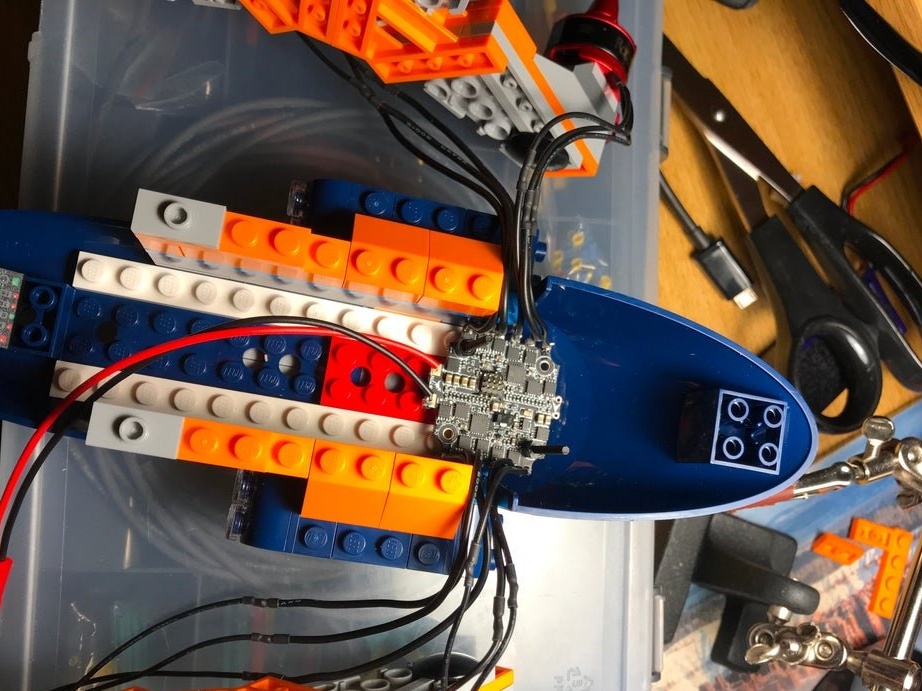
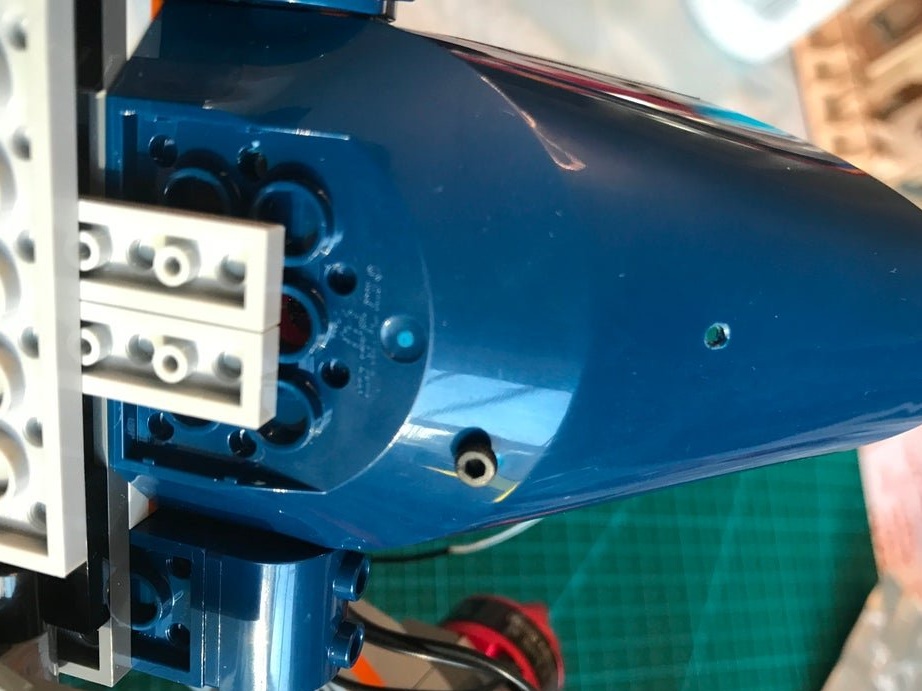
İlk olarak, usta LEGO-Arctic'i toplar. Sonra model kısmen sökülür. İçeride, modelin dengelenmesini gözlemleyerek pili ve denetleyiciyi yerleştirmeniz gerekir.


İkinci Adım: Motor Takozu
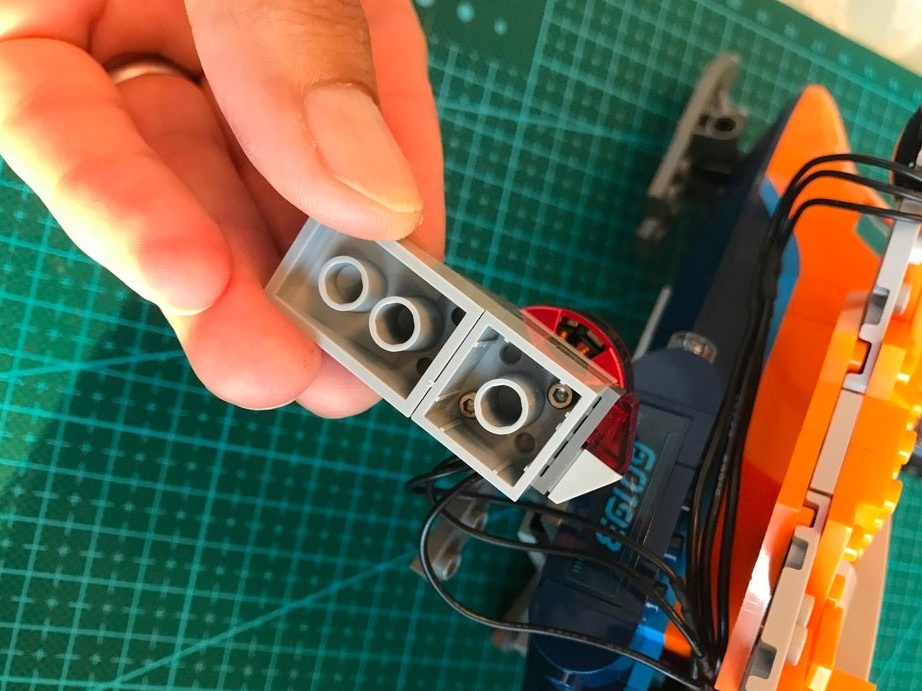
Standart 1806 fırçasız motorun montaj delikleri, standart LEGO 2x2 plakadaki saplamalarla hemen hemen aynıdır. Bir quadrocopter üzerindeki her “motor” montajı, genellikle üstte bir LEGO pervanesinin göbeklerinde tutulan 2x2 koyu gri bir karoya (LEGO 3022) ve dikey bir pime (LEGO 2460) sahip 2x2 açık gri bir karoya sahiptir.
Master montaj deliklerini açar. Motorlarda, merkezde bir gelgit var. Kiremitin ortasına bir delik açılır. Motorları emniyete alır.








Üçüncü Adım: Omuzlar
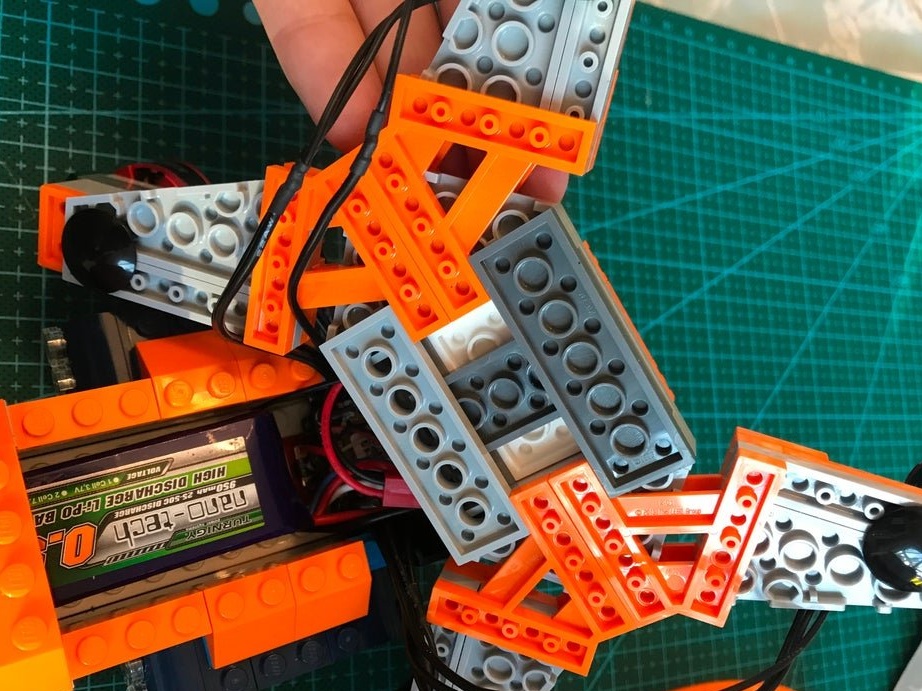
Quadrocopter'in “omuzlarını” yeniden düzenleyerek, motorların daha geniş veya daha dar bir düzenini ve vidaların birbirine göre yerini sağlamak için düzeni biraz değiştirebilirsiniz.
Standart LEGO tertibatında (ilk fotoğraf) “omuzlar” vardır ve motorlar oldukça büyük bir vida çakışması ile geniş (yatay olarak) yerleştirilmiştir. Master “omuzları” yeniden oluşturur ve motoru ve buna göre vidaları atar.



Dördüncü Adım: elektronik
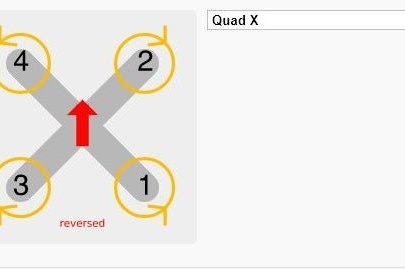
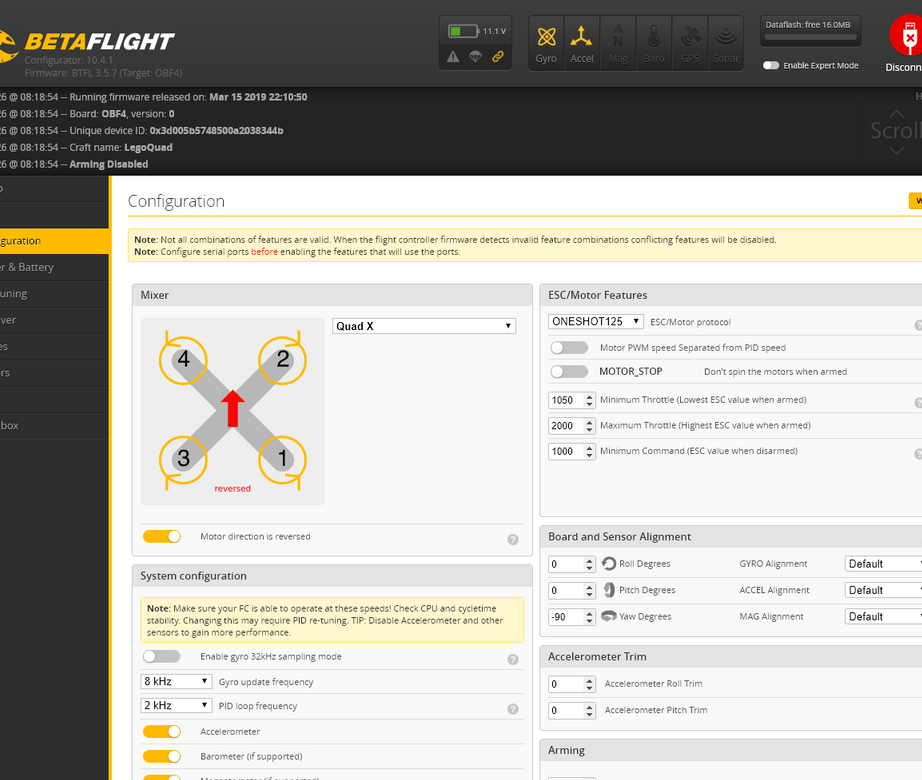
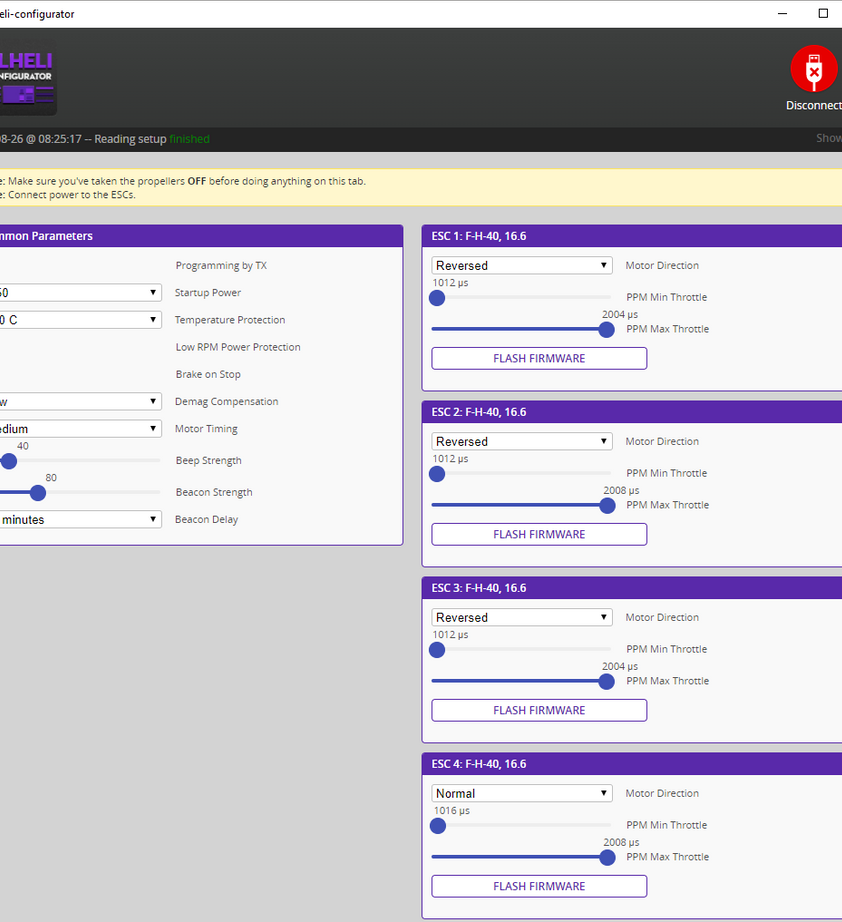
Şemaya göre, elektronikleri kurar. İlk fotoğraf motorların dönme yönünün bir diyagramını göstermektedir. Dönüş yönü programlama aşamasında da değiştirilebilir.
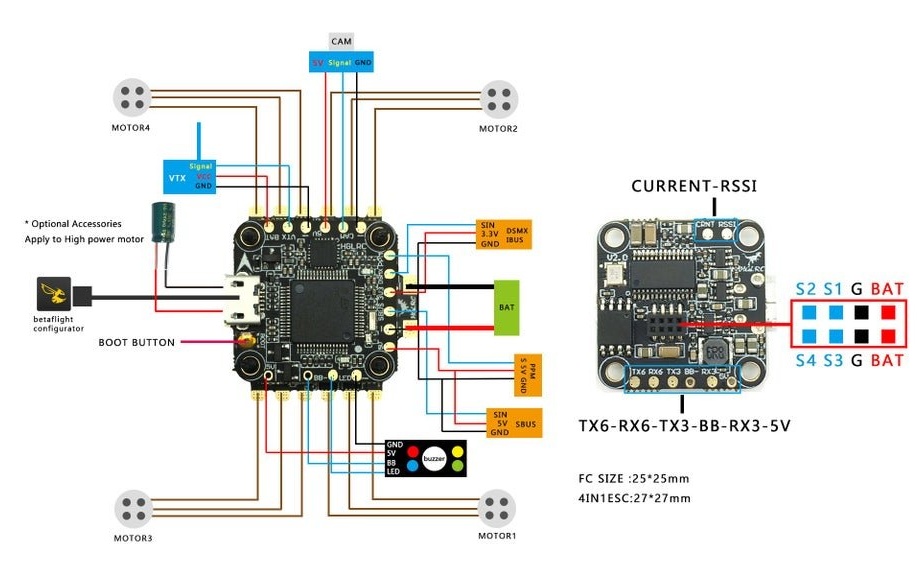

Kurulum tamamlandıktan sonra ve pili bağlamadan önce, sihirbaz kopmaları veya kısa devreyi önlemek için bağlantıları kontrol eder.
Gücü açtığınızda, uçuş kontrol cihazındaki ışıkları ve ESC'den birkaç bip sesi çıkarmalısınız.
Beşinci Adım: Kurulum
Artık her şey bağlandığına göre, denetleyiciyi yapılandırma zamanı.Bu, RC vericisinden kontrol sinyallerinin kodunu çözme, sensör giriş sinyalini (hızlandırıcı, jiroskoplar) işleme ve ESC'nin motorları belirli bir hızda döndürmesi için kontrol sinyalleri sağlama görevini gerçekleştiren yazılımı (ürün yazılımı) indirmek anlamına gelir.
Güvenlik için pervaneleri çıkarın! İlk birkaç kurulum adımı için pil gerekmez, sadece USB gücü vardır.
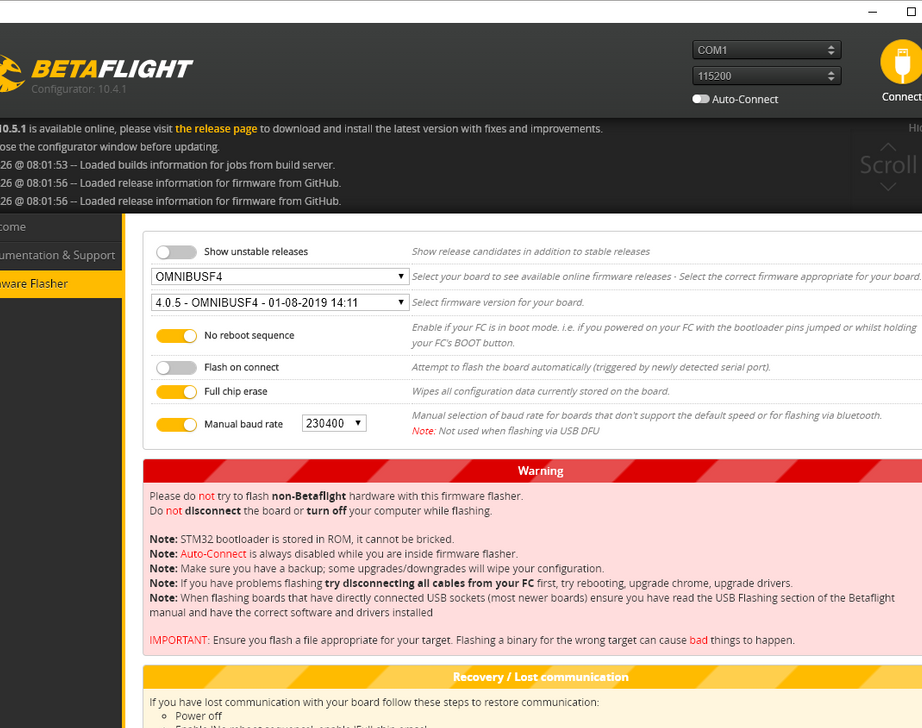
Beta Yapılandırıcıyı İndirin
Mikro USB kablosunu uçuş kontrolörüne bağlayın. Denetleyici kasaya vidalanmamışsa bunun daha kolay olabileceğini lütfen unutmayın.
Uçuş kontrolörü için uygun ürün yazılımını indirin ve yükleyin.
betaflight-settings-legoquad.txt
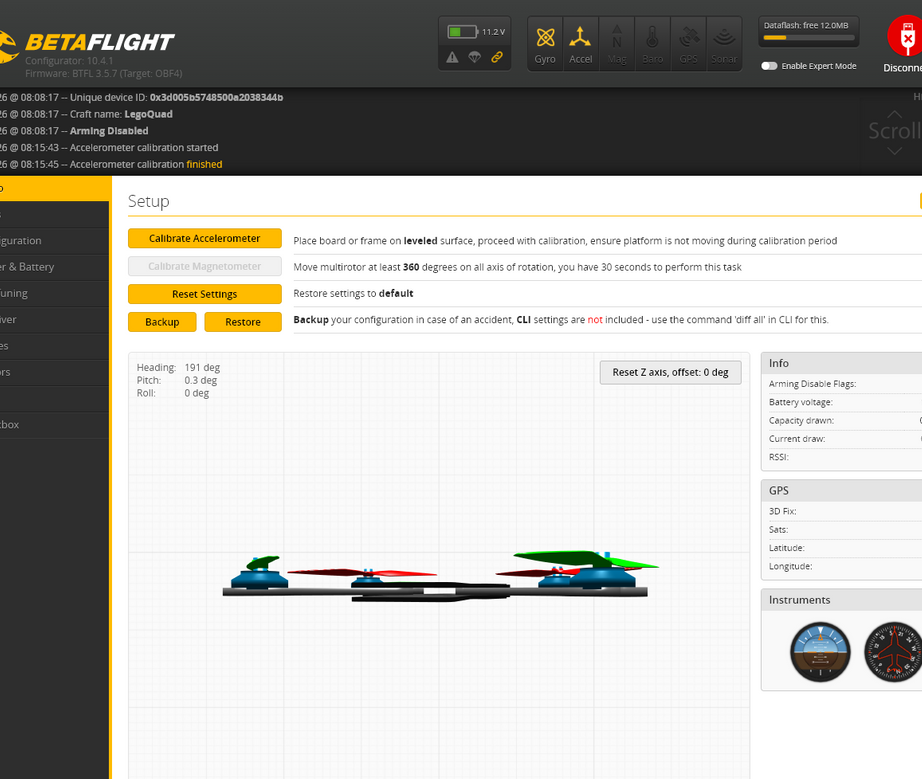
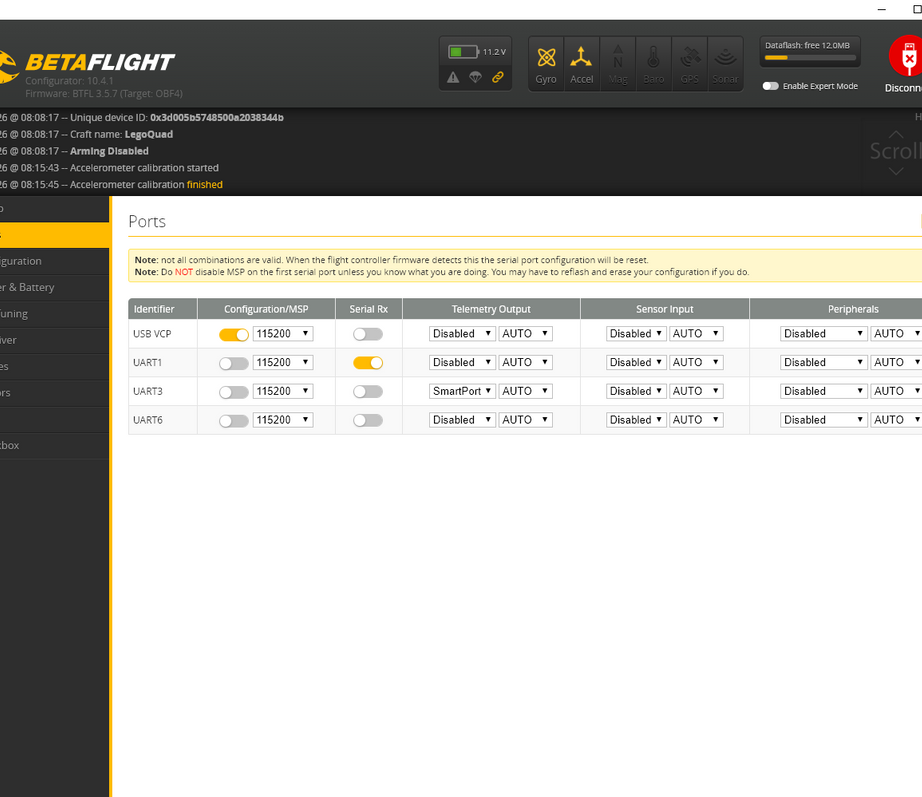
“Bağlan” düğmesine tıklayın ve aşağıdaki ayarları yapılandırın:
1. Kurulum - motorların model kalibrasyonu
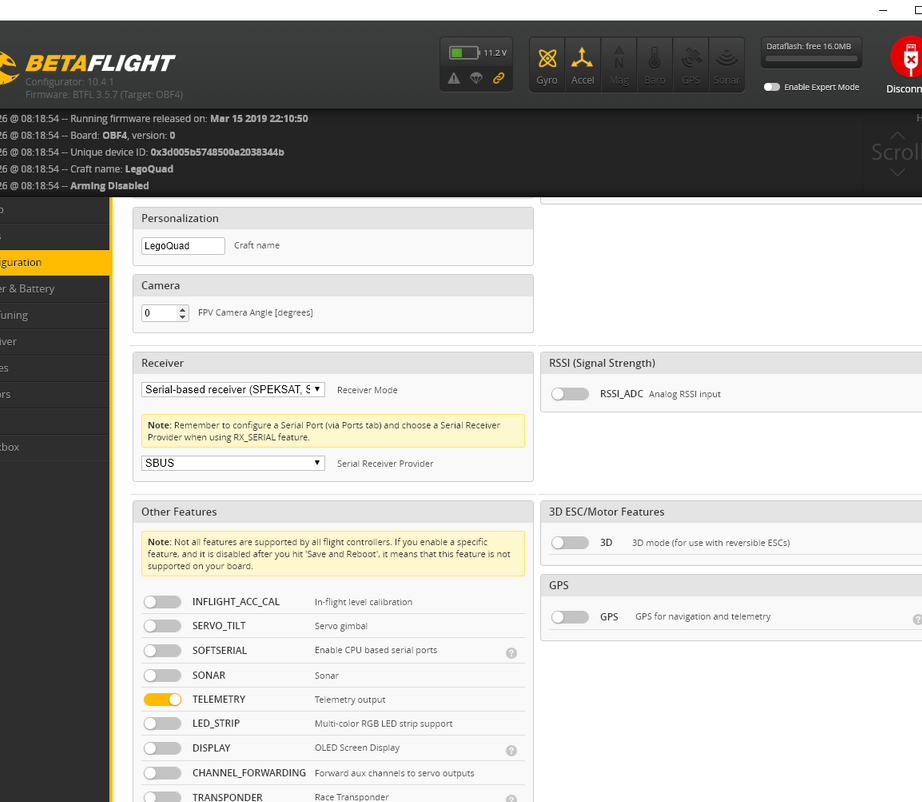
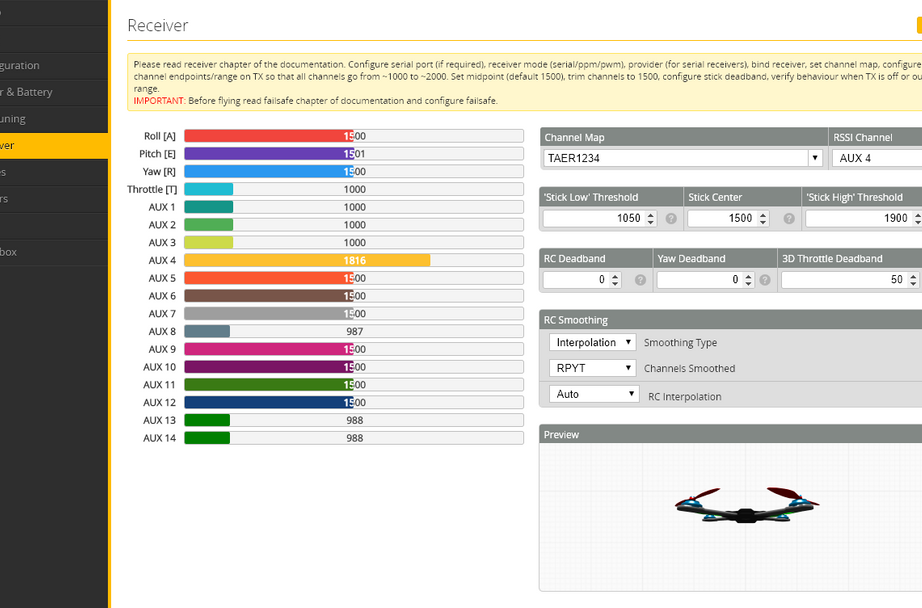
2. Bağlantı noktalarını belirtin - SBUS RC alıcısını bağlamak için UART1 - Seri RX
3. Kaydetme ve yeniden başlatma
4. Alıcı ve verici arasında bir bağlantı kurun
5. Aşırı yük
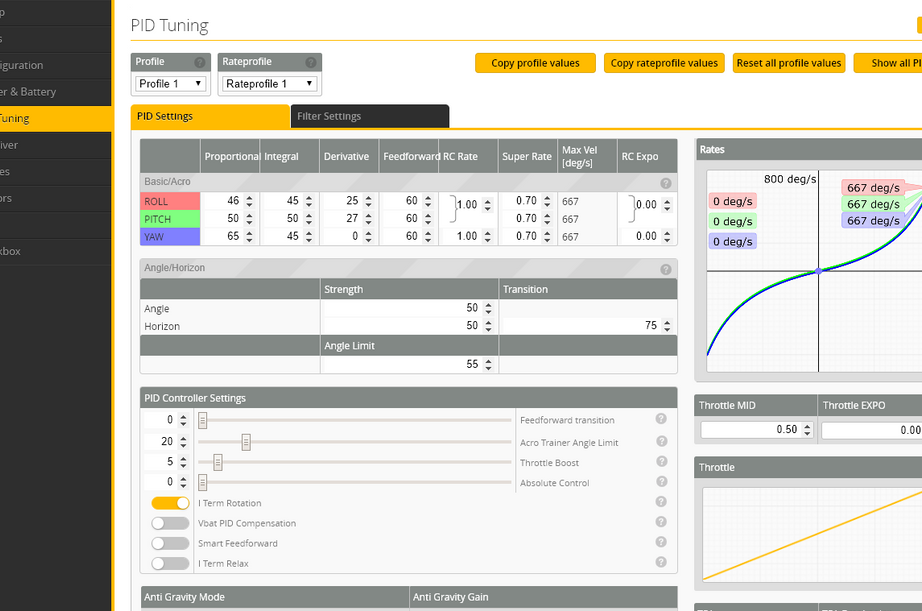
6. PID yöneticisi için değer 250 olarak ayarlanmıştır
7 Aküyü bağlayın
8. Gerilimi ayarlayın.
9. Kanal ekranınızın ve kontrol yönünüzün doğru olduğundan emin olun, her şey ayarlandığında, sağ alt köşedeki quadcopter model görüntüsü RC kontrol cihazındaki kumanda kollarını hareket ettirirken tüm doğru yönlerde hareket etmelidir.
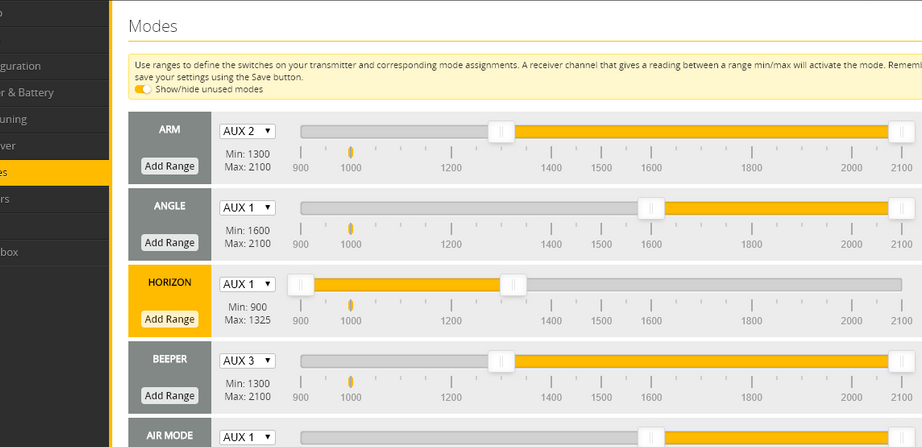
Modları yapılandırır.
ARM açık / kapalı
Geleneksel FPV uçuşu için HORIZON otomatik tesviye / ACRO
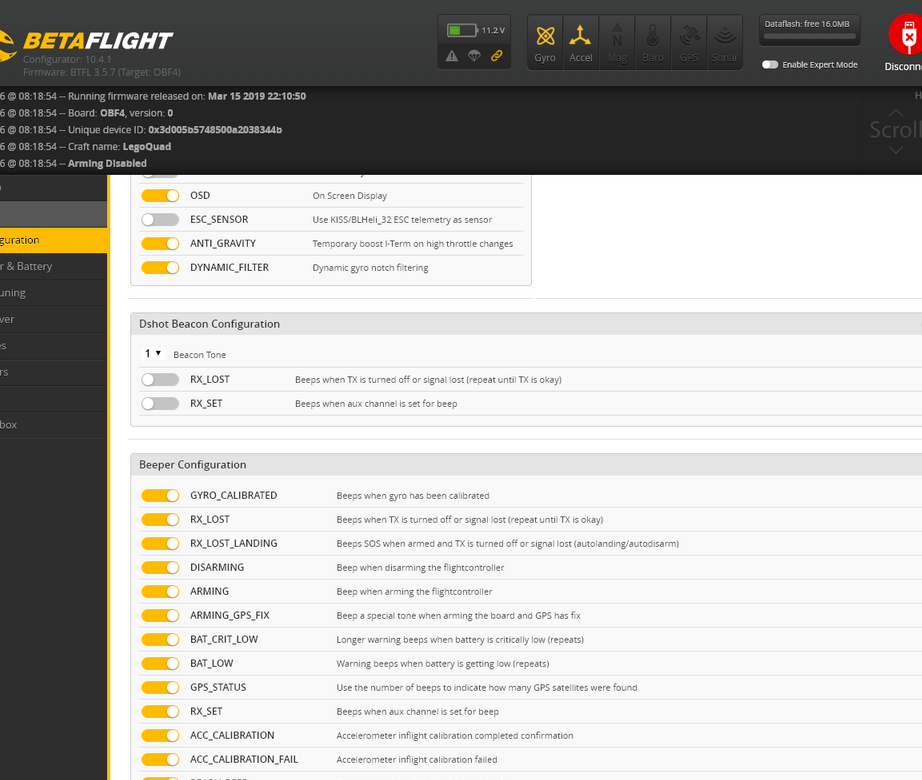
BEEPER - Modeli uzun otların veya çalıların arasında kaybederseniz kullanışlıdır.
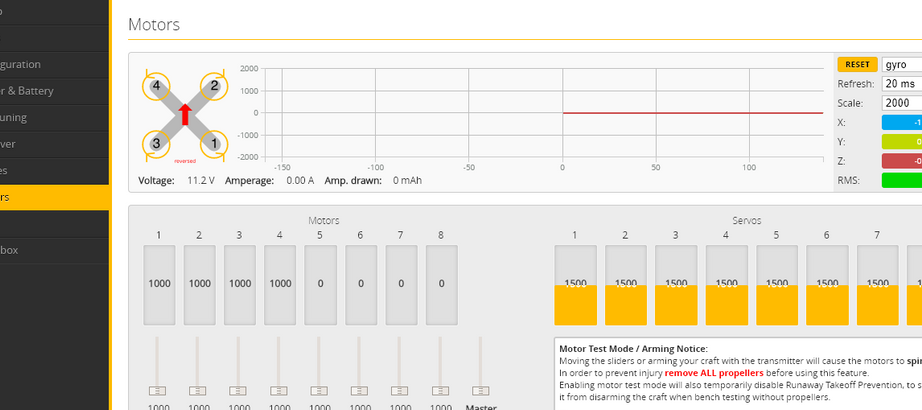
Motorlar sekmesi - bu seçeneği, her motoru ayrı ayrı kontrol etmek ve her birinin dönüş yönünü işaretlemek için kullanın
BLHELI yapılandırıcı ile yanlış dönüş yönlerini düzeltin
Tüm bu adımlardan sonra, USB ve pilin bağlantısını kesip gücü açabilir ve her şeyin çalışıp çalışmadığını kontrol edebilirsiniz:
Vericiyi ve gücü açın
Pili bağlayın ve quadrocopter'i düz bir yüzeye monte edin
ARM anahtarını açın, motorlar düşük hızda dönmeye başlamalıdır.
Hızı arttırırken gazı kontrol edin
Yatay modda, quadrocopter'i yatırmayı deneyin ve motorların uygun şekilde tepki verdiğinden emin olun, örneğin ileri doğru eğin ve ön motorlar hızlanacaktır.

Altıncı Adım: Son Montaj
Neredeyse kasanın tüm yapısı montaj kilitleriyle tutulur. Master, motorları monte etmek için sadece sıcakta eriyen yapıştırıcı kullanır.


Her şey hazır ve test edebilirsiniz.



