
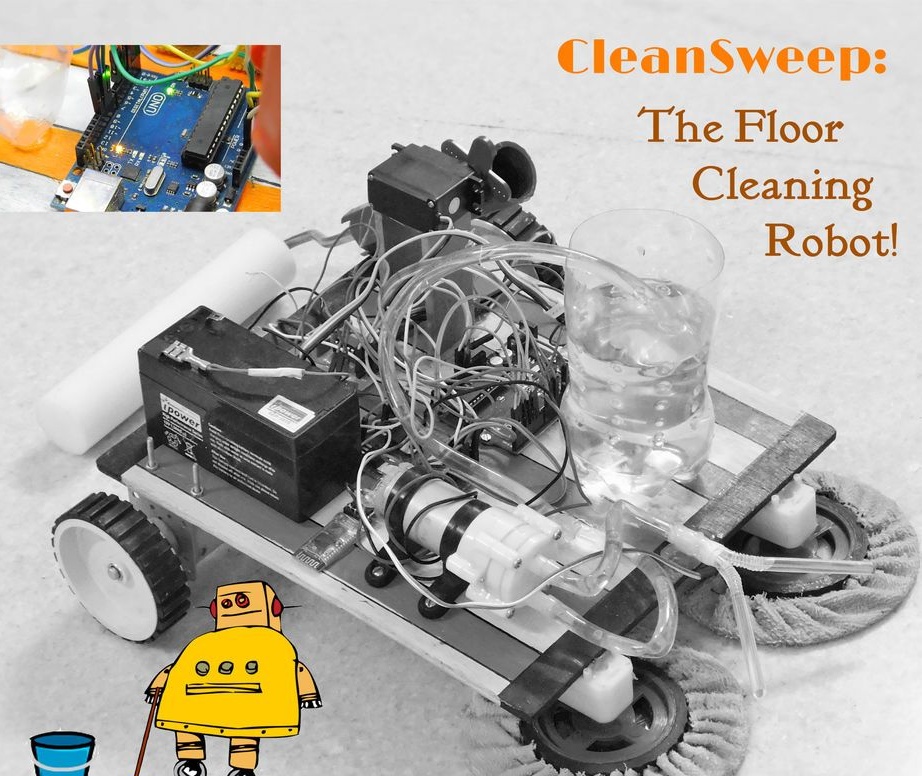
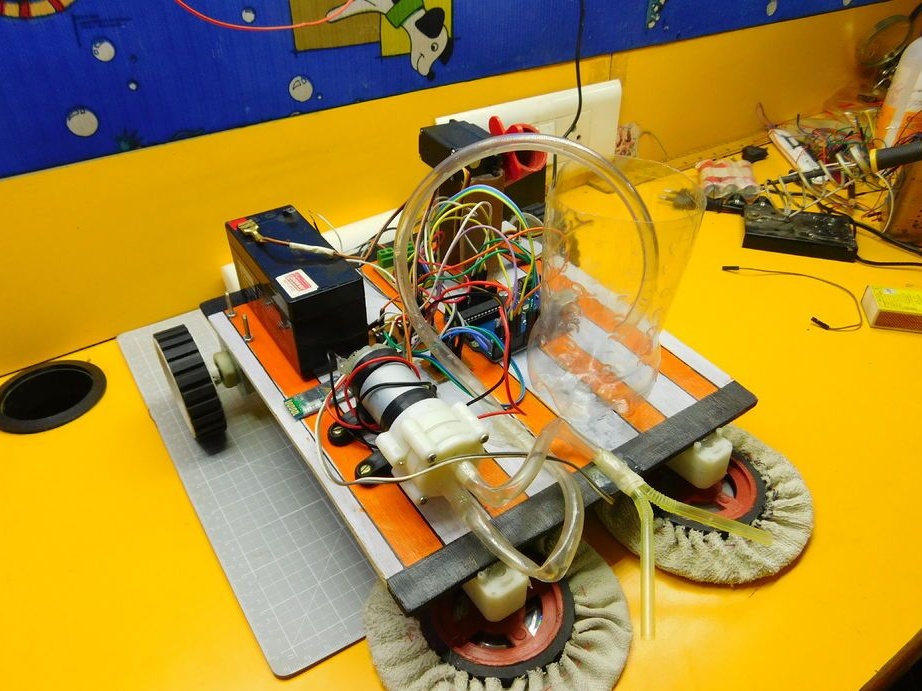


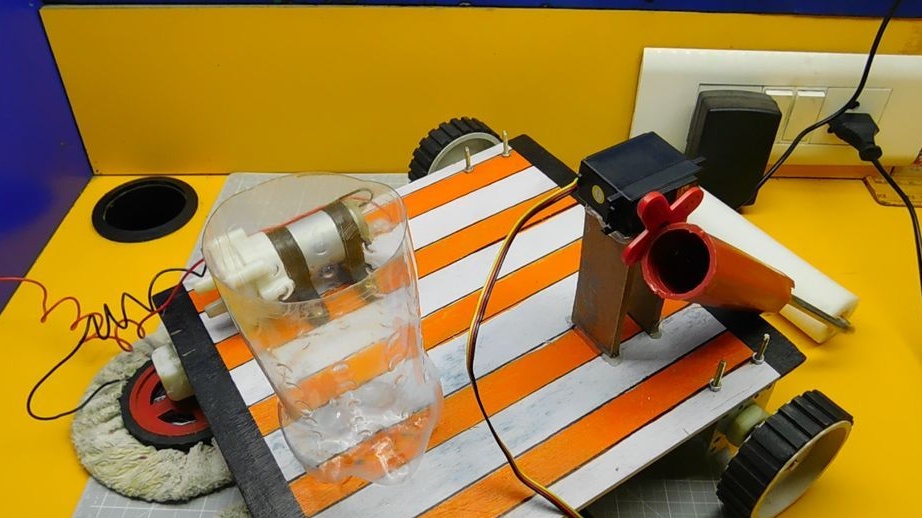
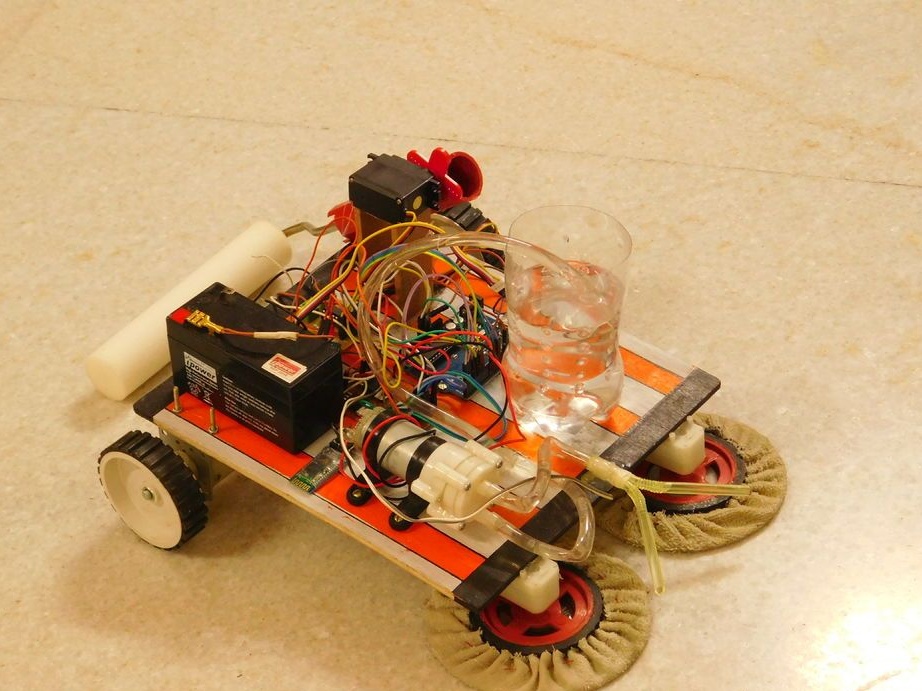
RobotBiçerdöver cephanesinde dişli motor şaftının önüne monte edilmiş iki döner fırçaya sahiptir. Vites kutusu 75 rpm hızında döner. Robotun üzerinde bir su deposu var. Robotun arkasına bir silindir sabitlenmiştir. Robot, redüktörlü motorun eksenine sabitlenmiş tekerlekler yardımıyla karıştırılır. Süpürge bluetooth ile akıllı telefon tarafından kontrol edilir. Gelecekte, Master robotu tamamen özerk yapmayı planlıyor. Bu cihazın nasıl çalıştığını görelim.
Araçlar ve malzemeler:
-Motor dişlisi 100 rpm -2 adet;
-Motor için tekerlekler -2 adet;
-75 rpm tekerleğe sahip motor redüktör - 2 adet;
-Arduino UNO;
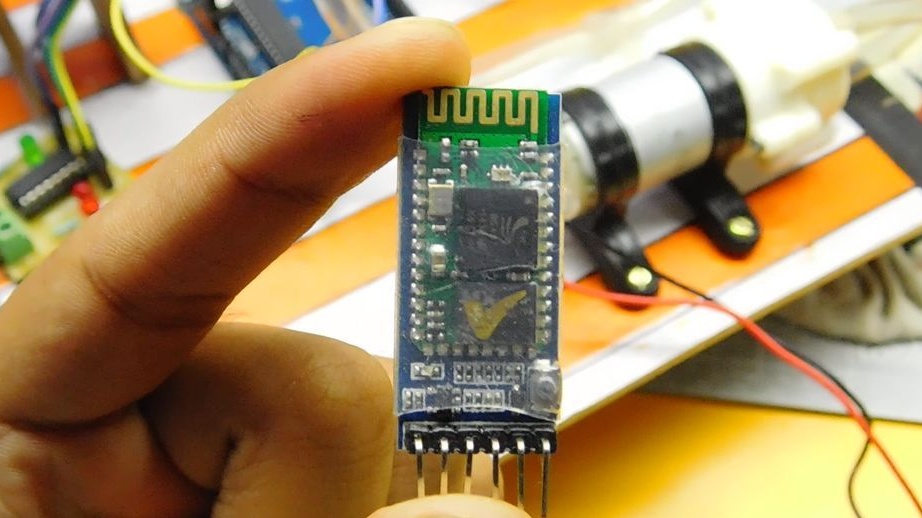
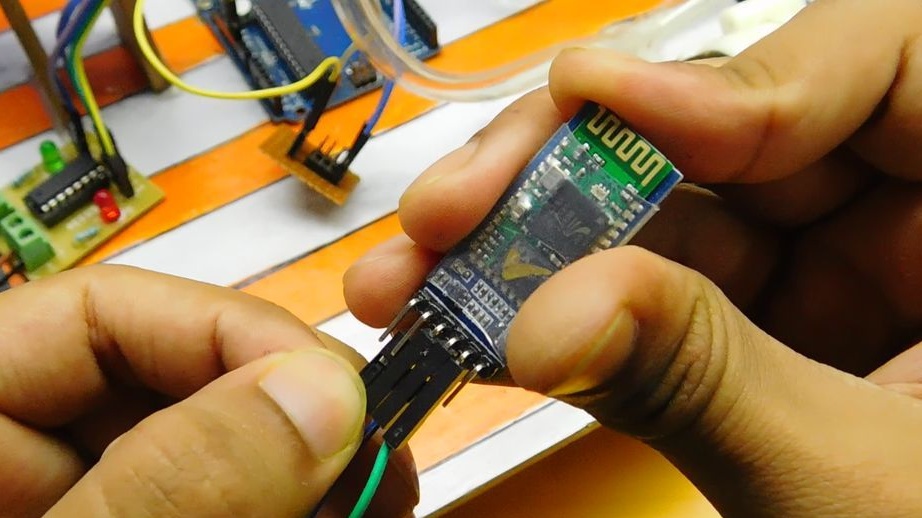
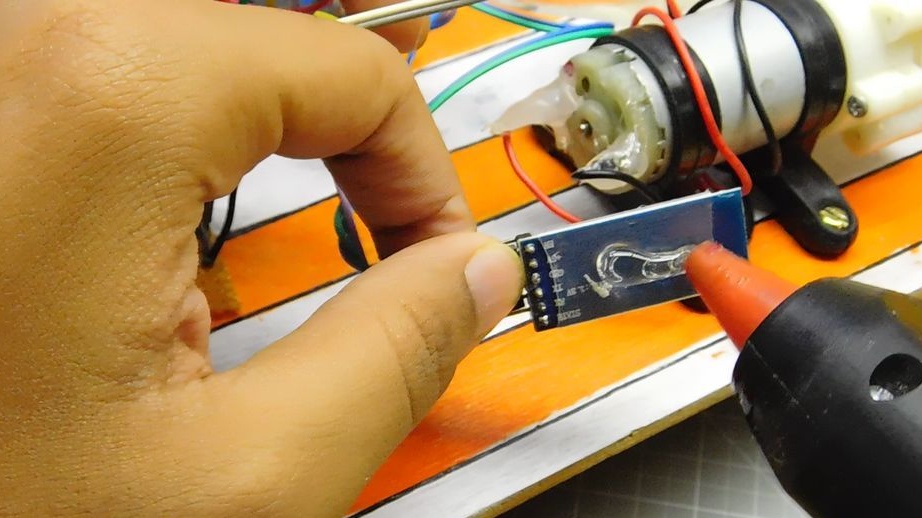
- Bluetooth modülü HC-05/06;
Sürücü L293D;
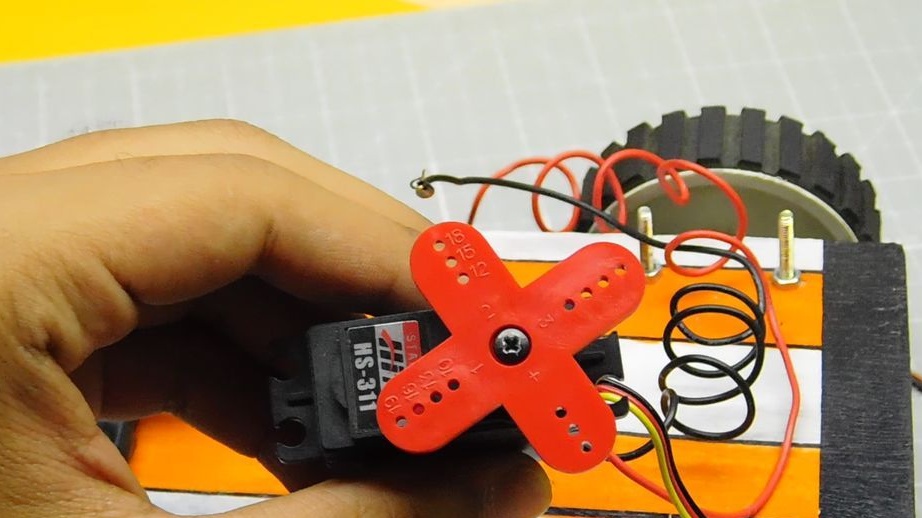
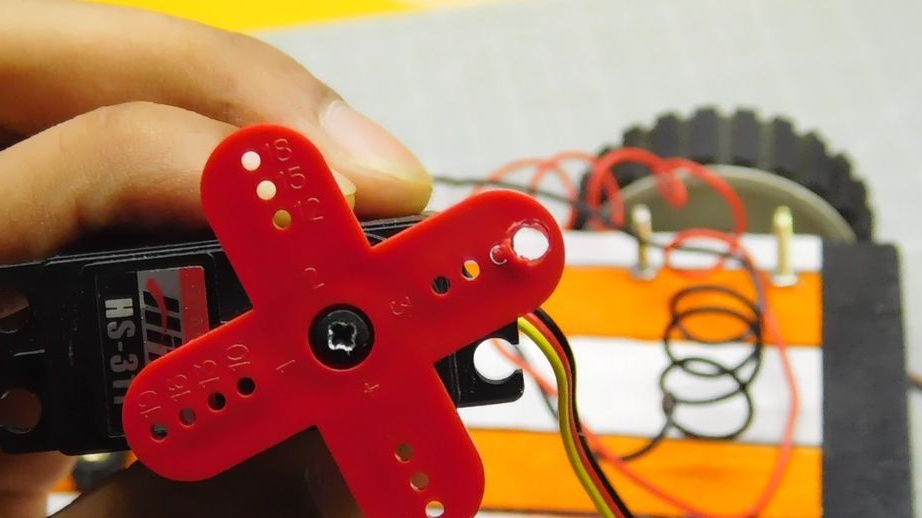
- Servomotor (180 derece dönüş);
-12V pil;
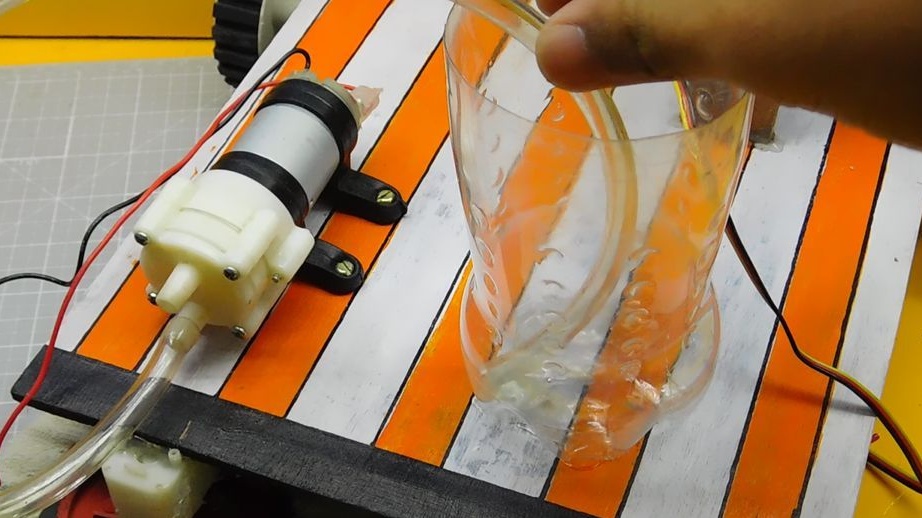
- Pompa 12 V;
Transistör TIP31C;
Transistör TIP122;
- CD sürücüsü - 2 adet .;
- Boya rulosu;
- Bez peçeteler;
- İplikli iğne;
-Trubka;
seeing-;
- Süveter;
-Montaj tahtası;
-Krepezh;
-Fanera;
-Plastik şişe;
- Havya;
-Tutkal tabancası;
-Drel;
- Pense;
-Dremel;
- fırça;
-Renkler;
-Marker;
- makas;











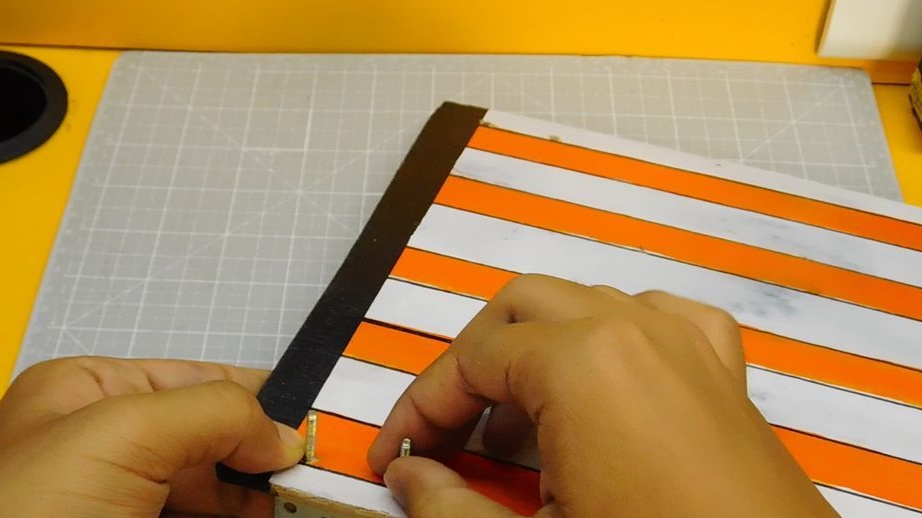
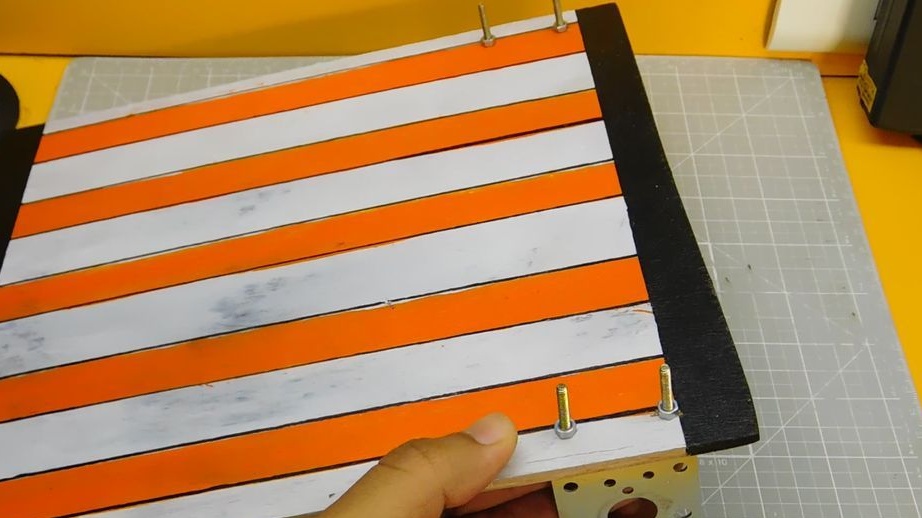
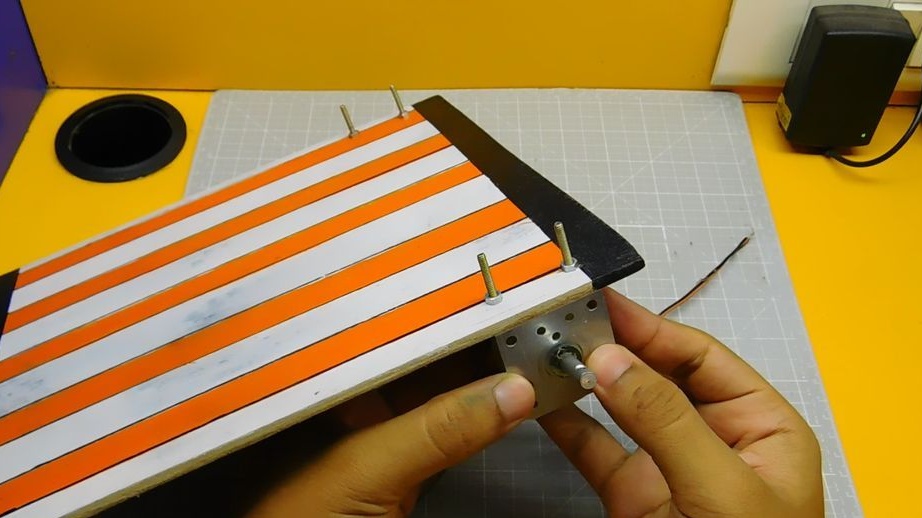
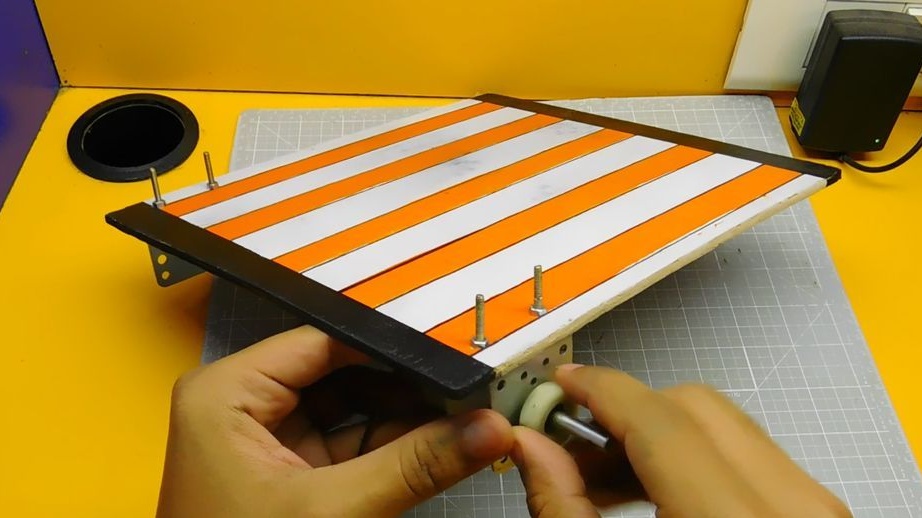
Birinci Adım: Vakıf
Kontrplaktan tabanı keser. Tabanın boyutları 30 * 22 cm'dir. Bir yandan dişli motorunu sabitler. Dişli motorunu tabanın diğer tarafına eş eksenli olarak sabitler.



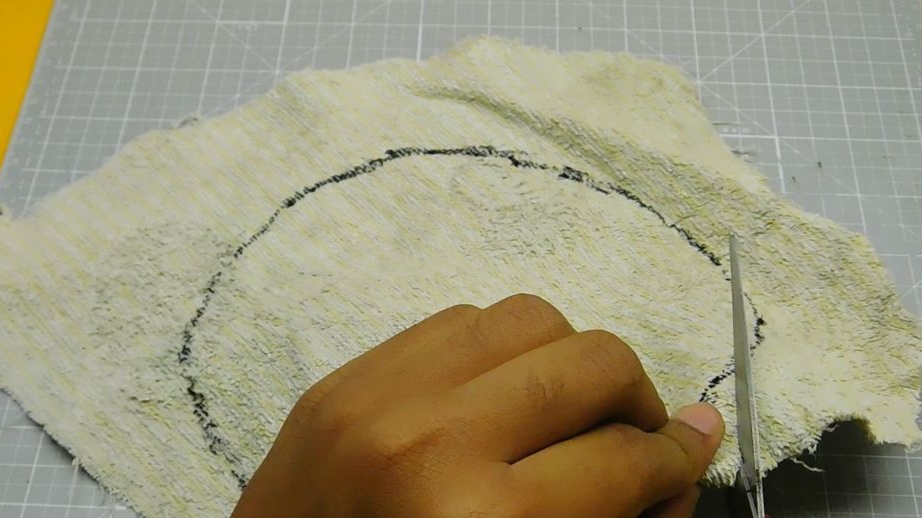
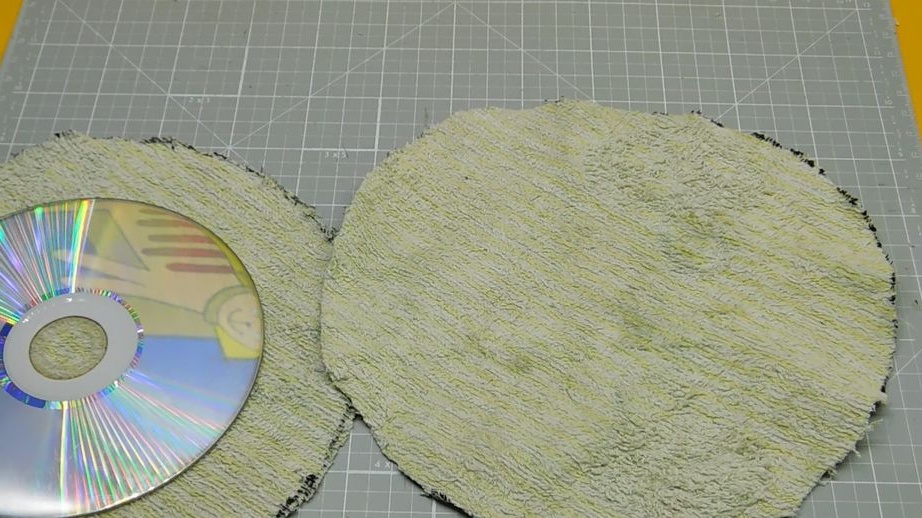
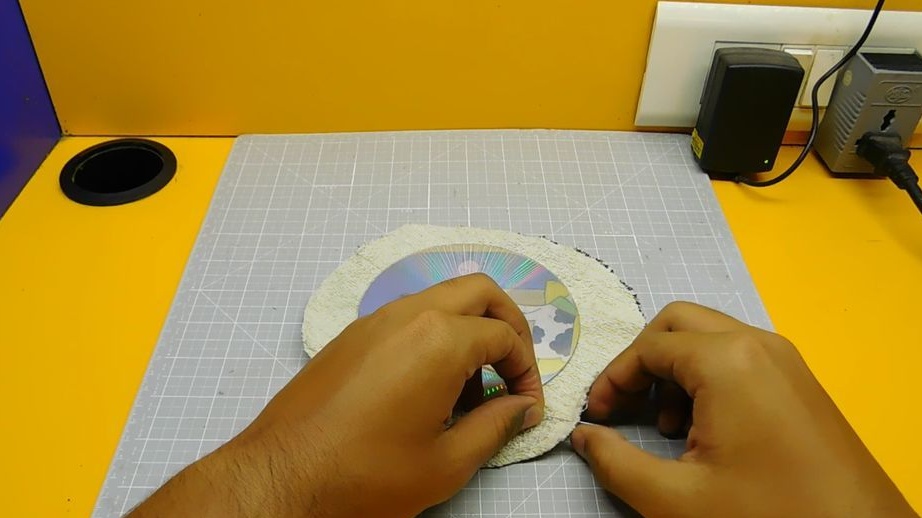
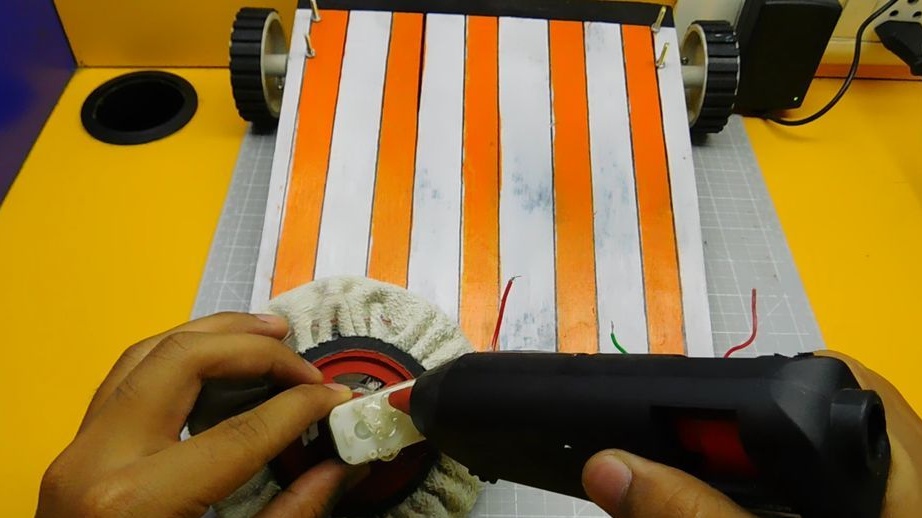
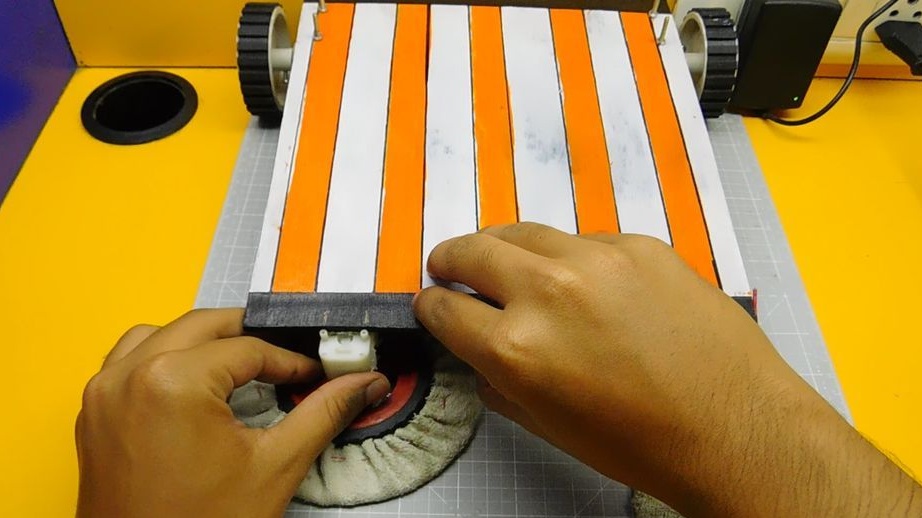
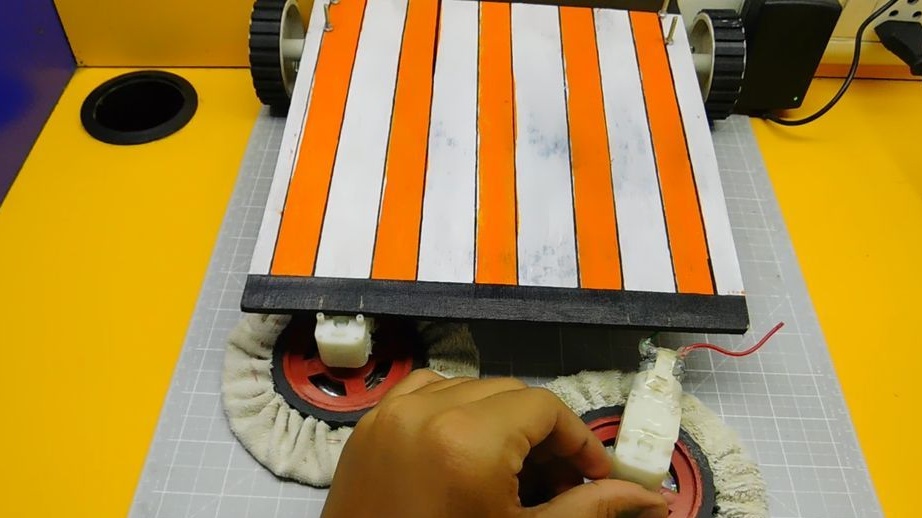
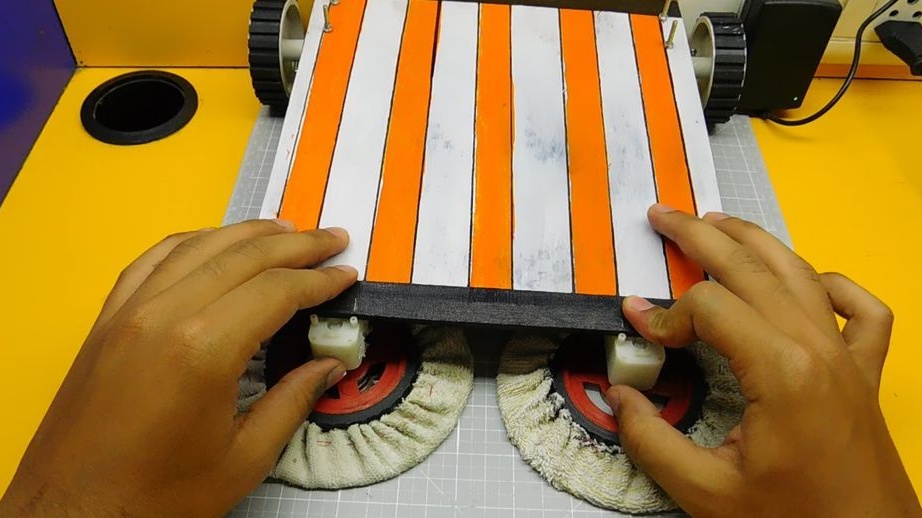
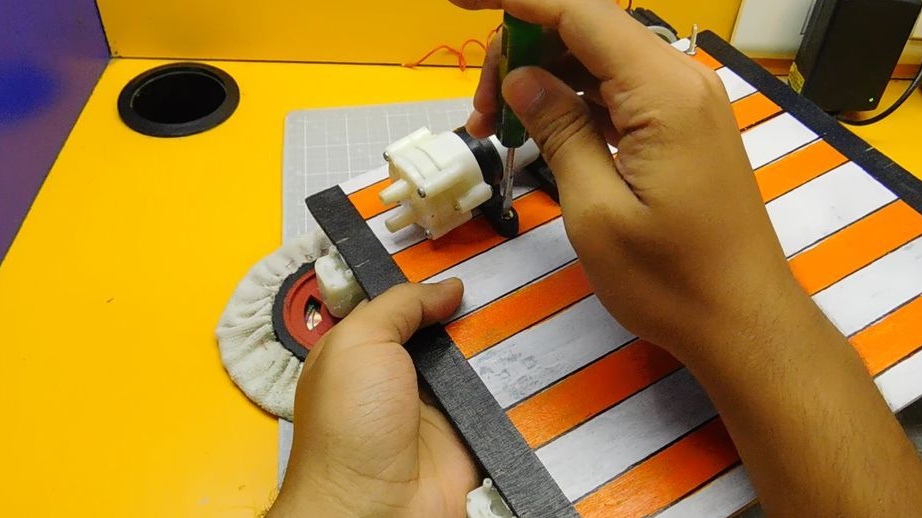
İkinci Adım: Fırçalar
Usta eski CD'lerden fırça yaptı. Bir bez kes. Sürüşünü kılıfladı. Başka bir diskle tekrarlanan işlem. Diskleri redüktörlü motordaki sıcakta eriyen yapıştırıcı ile sabitleyin. Her iki dişli motorunu platformun önüne sabitleyin.








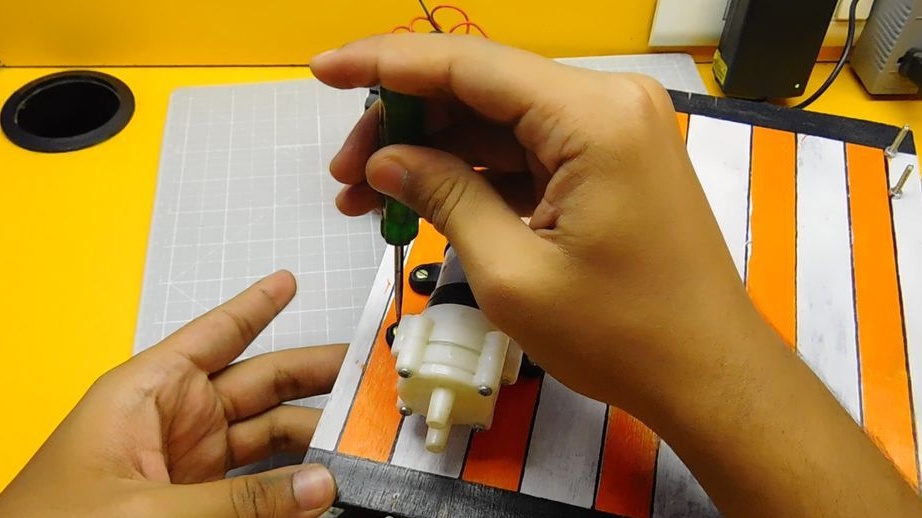
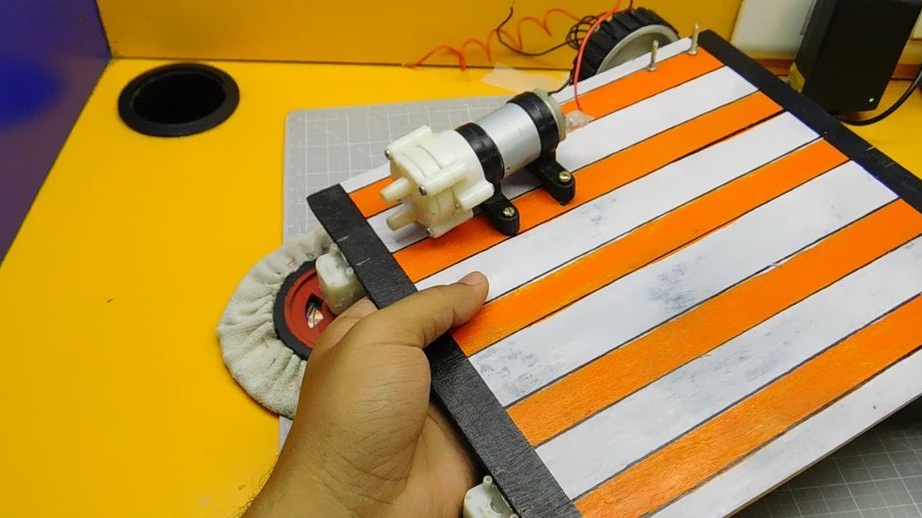
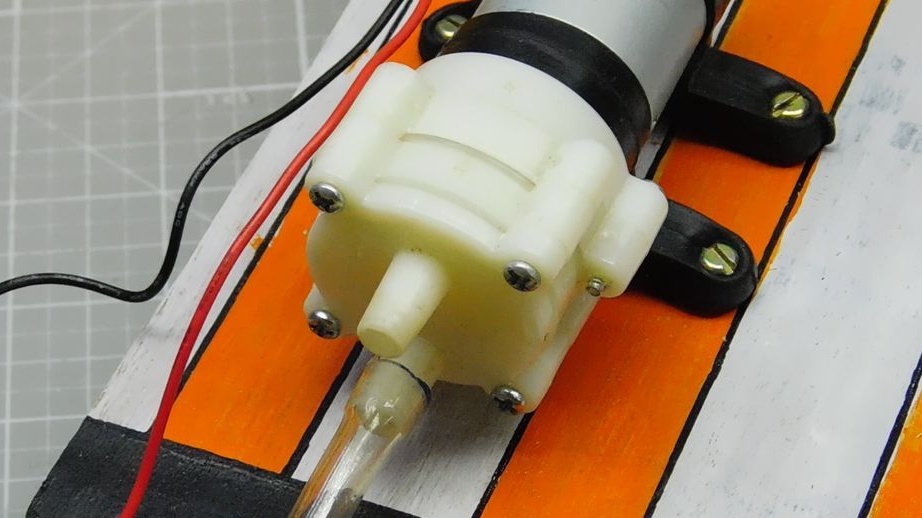
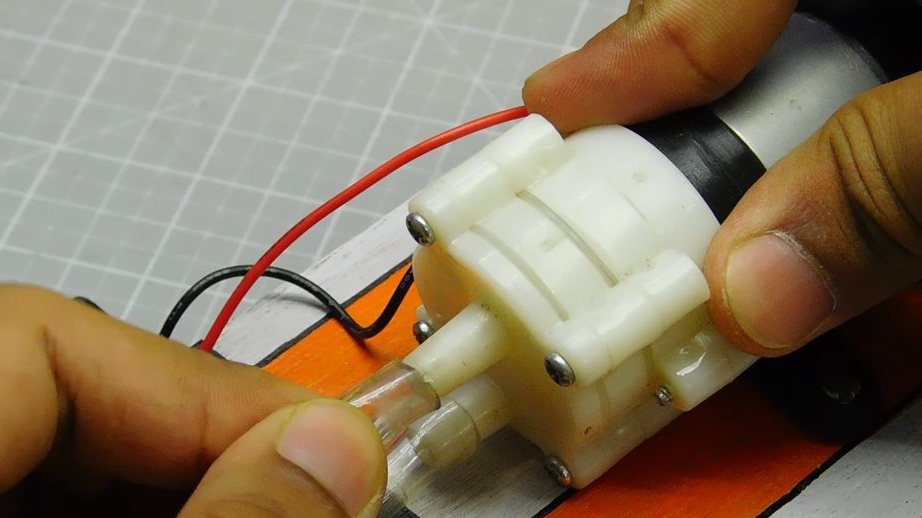
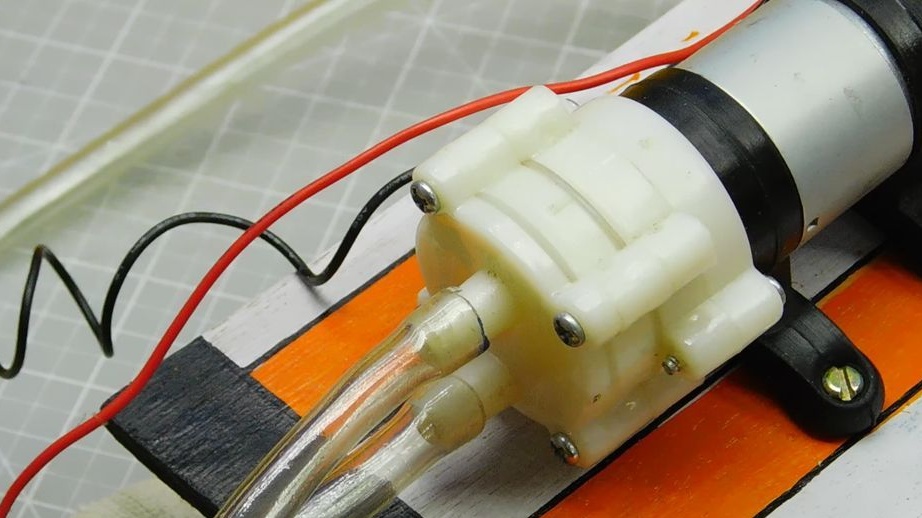
İkinci Adım: Su Temini
Pompayı platforma sabitler. Plastik şişenin üstünü keser. Şişeyi platforma sabitler. Bir su giriş borusu monte eder. Daha sonra, fırçalara su besleme borusu sabitlenecektir.








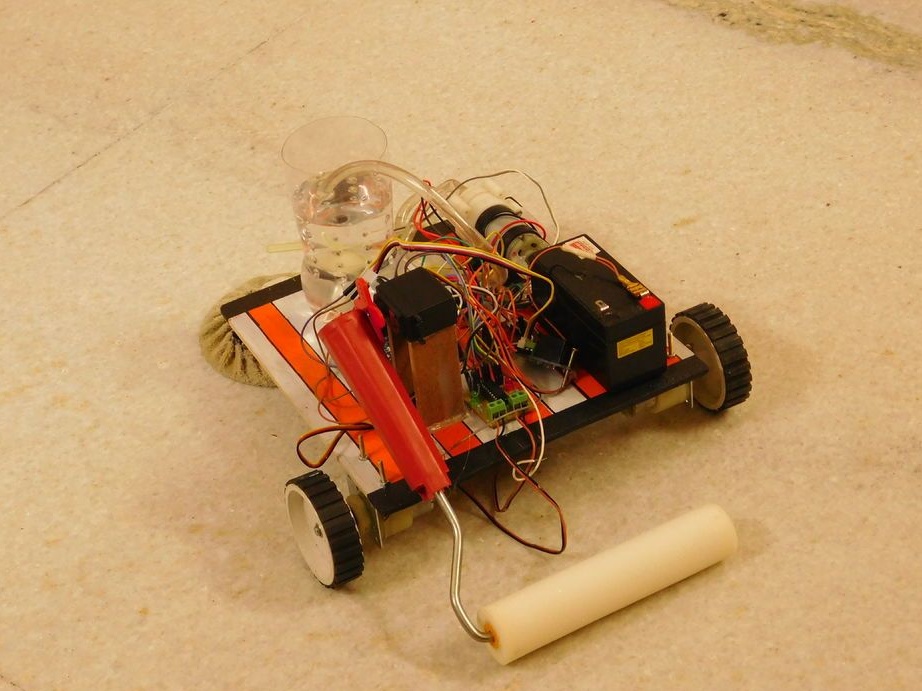
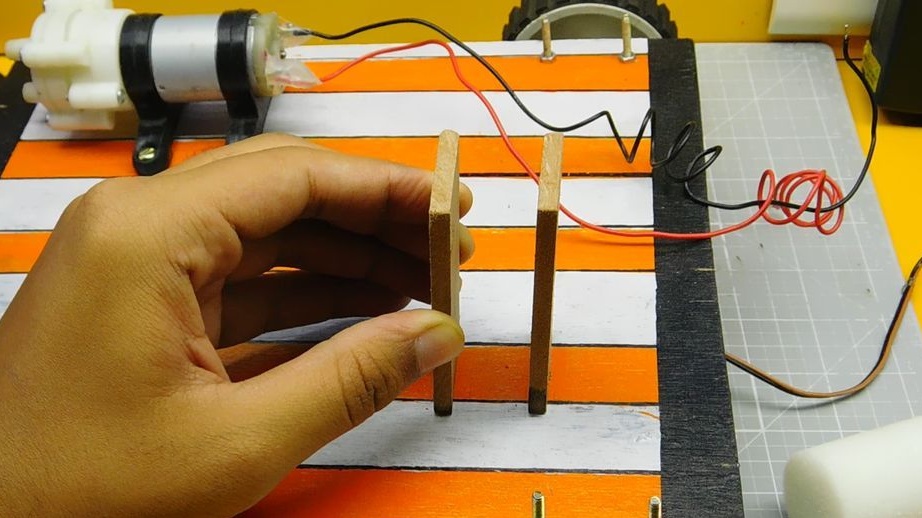
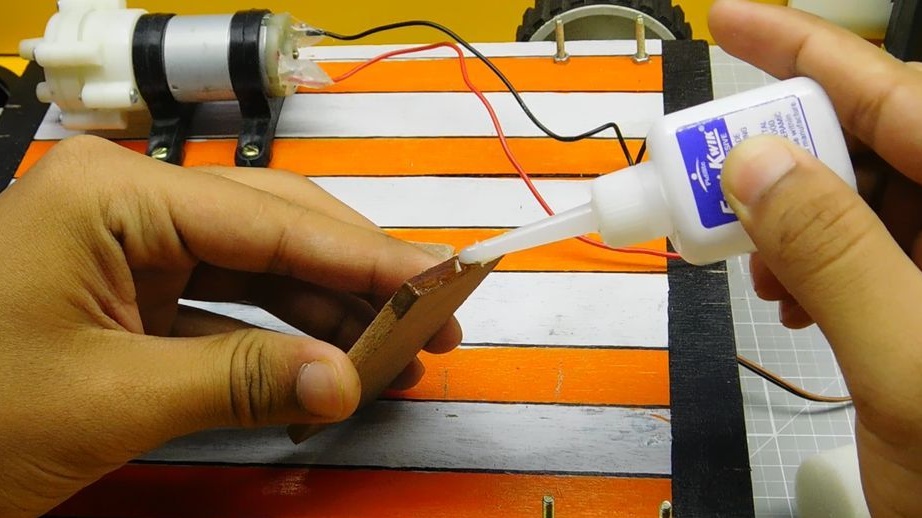
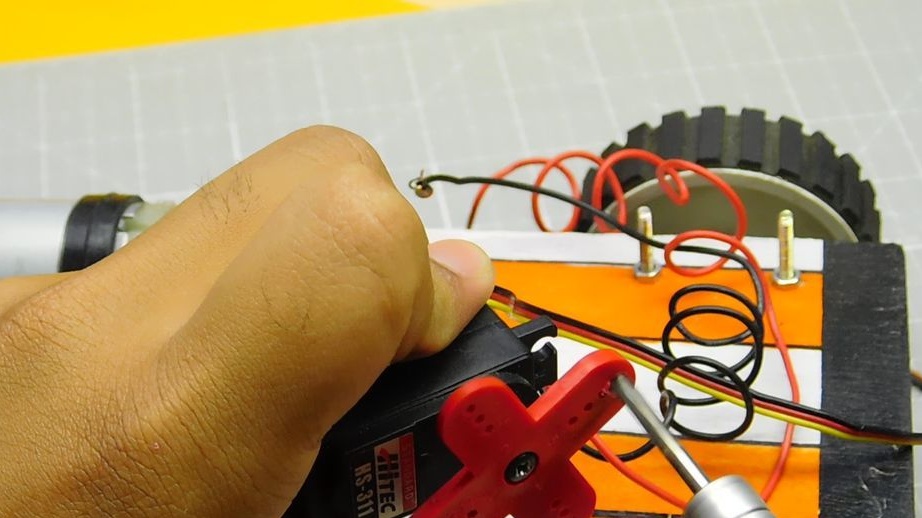
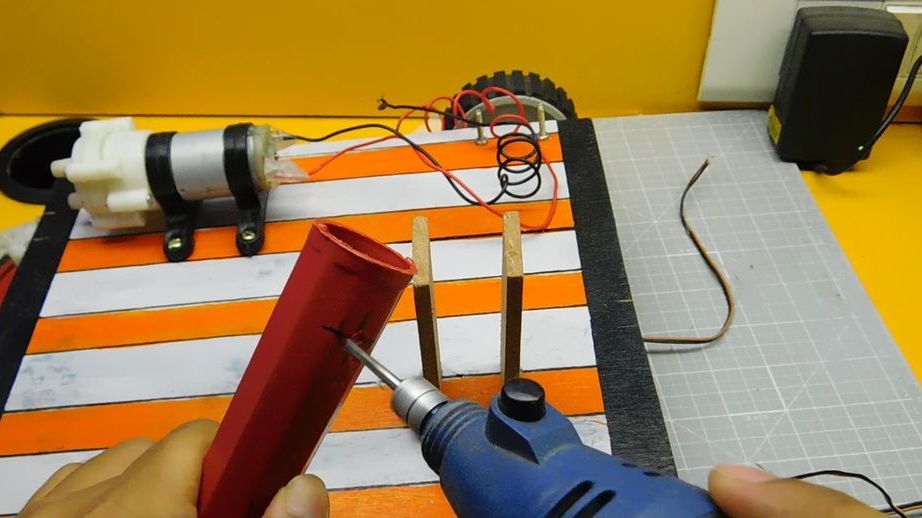
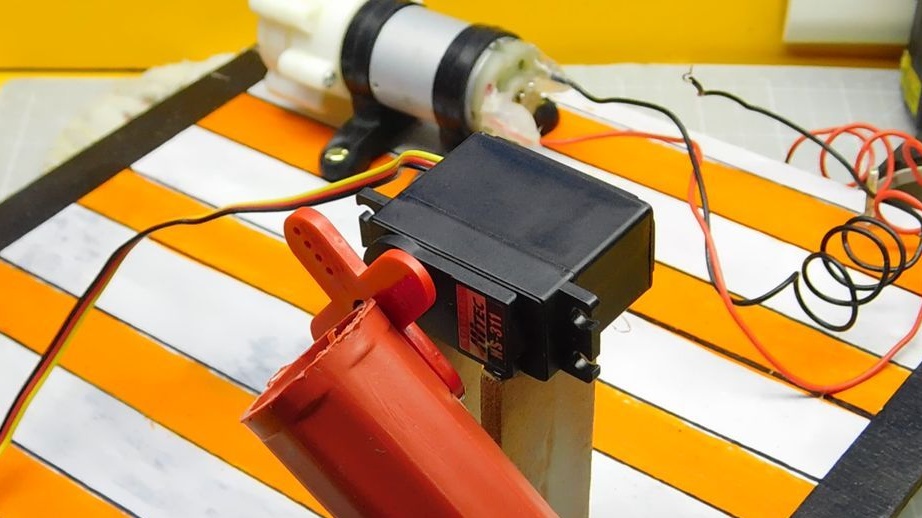
Üçüncü Adım: Makara Kaldırma Mekanizması
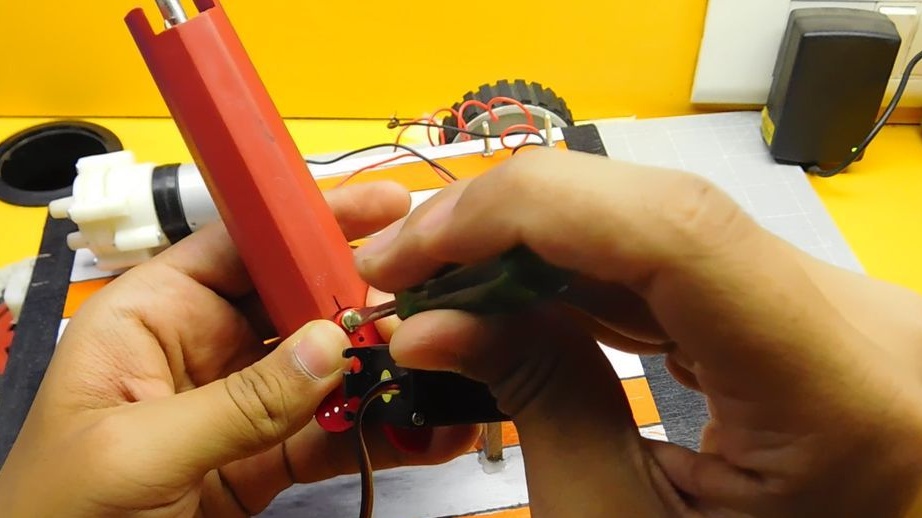
Silindirin görevi ince toz toplamaktır. Silindire zaman zaman ihtiyaç duyulduğundan, master silindiri kaldırmak ve indirmek için bir mekanizma yapmaya karar verdi. Platformdaki iki çıtayı birbirine paralel olarak sabitler. Biri servo kolunda, diğeri silindir kolunda olmak üzere iki delik açar. Makara kolunu kola vidalar. Servoyu çıtalara sabitler.


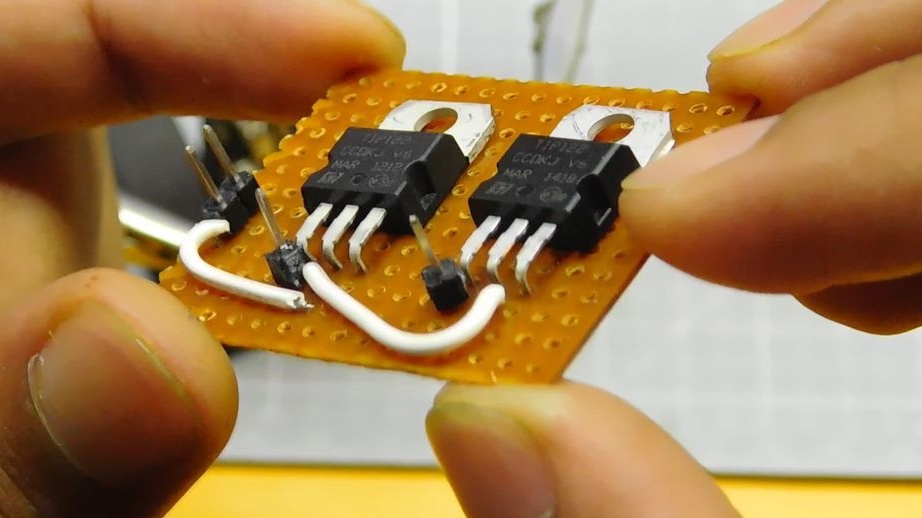
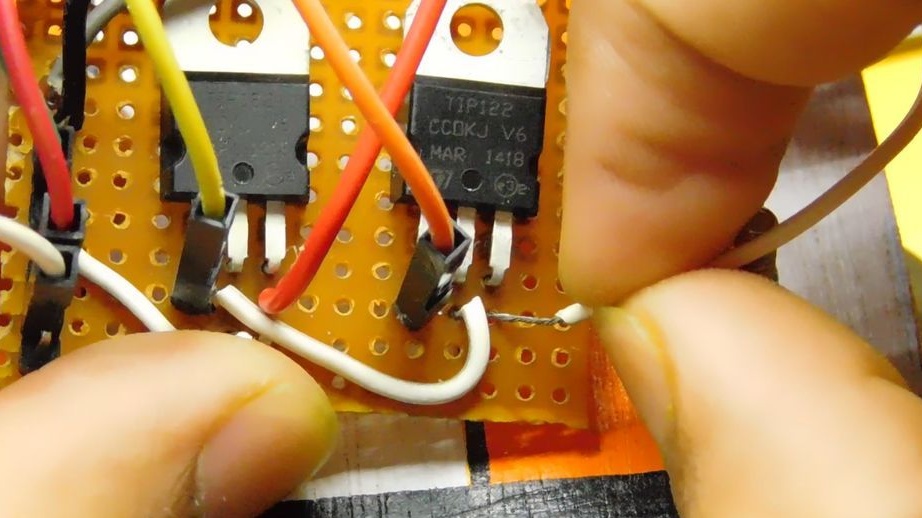
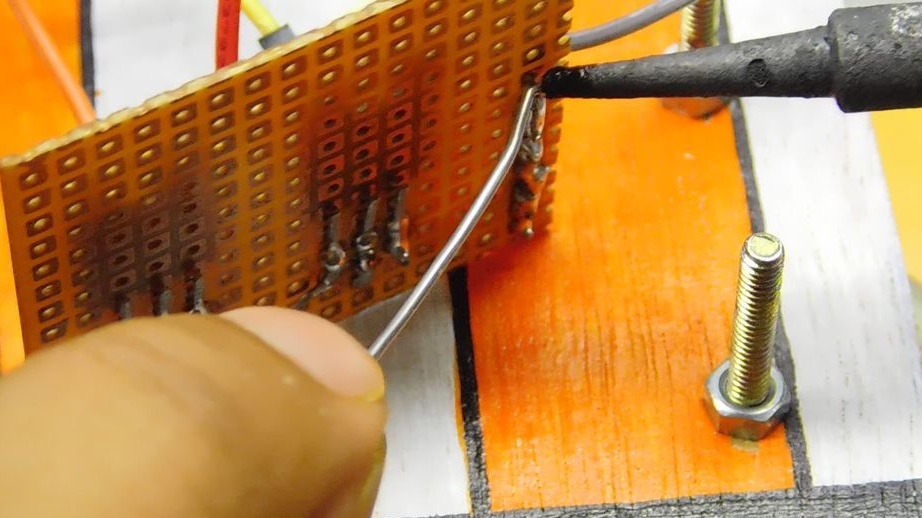
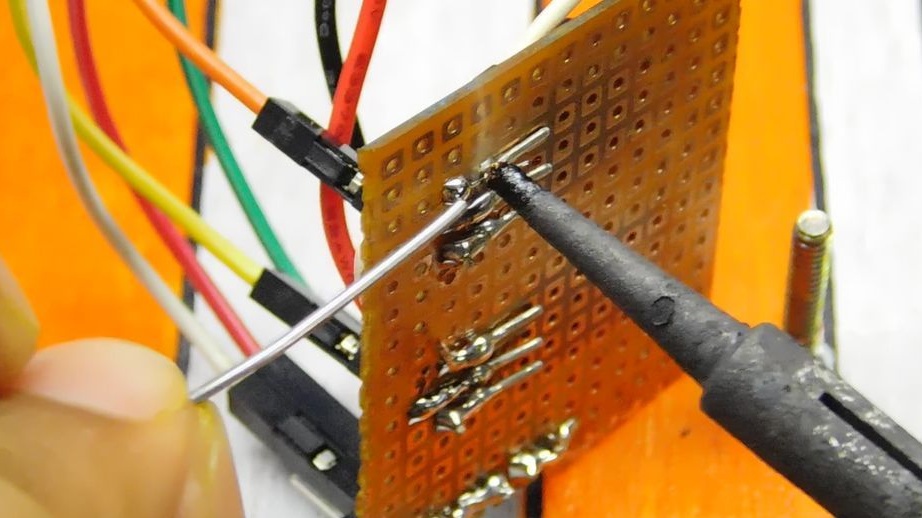
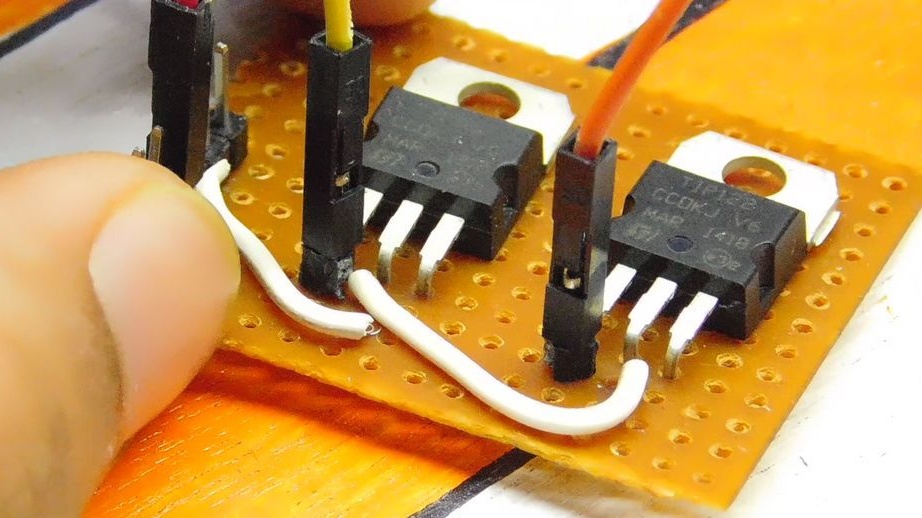
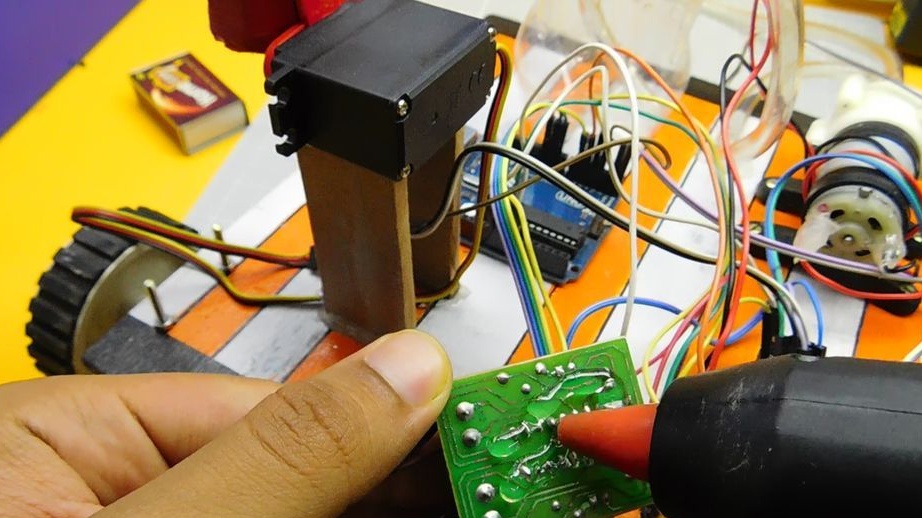
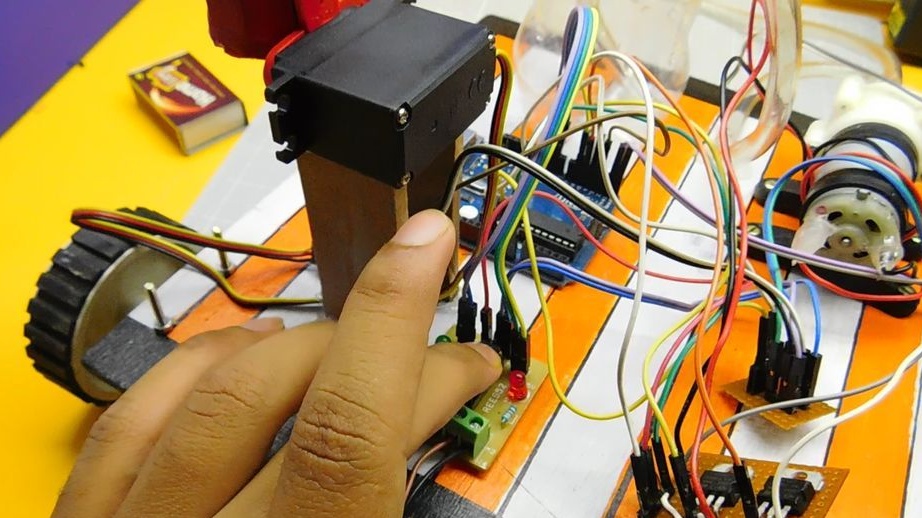
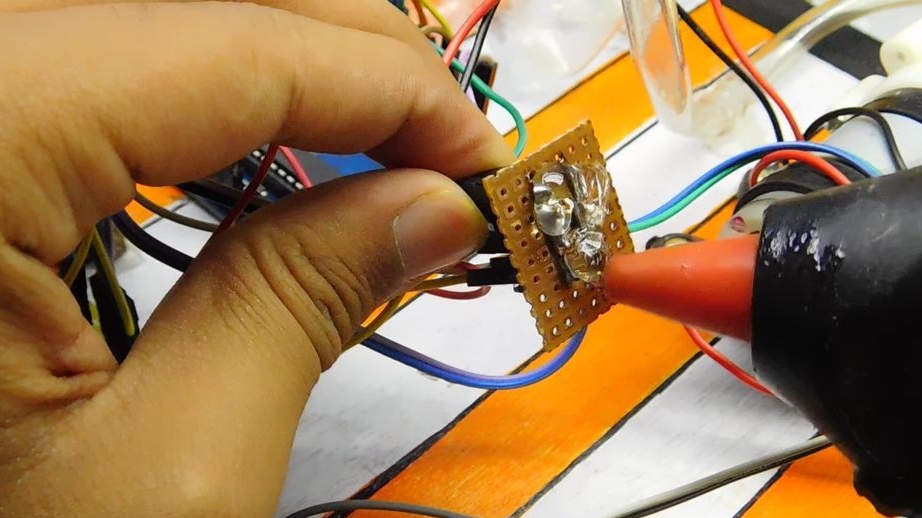
Dördüncü Adım: Transistör
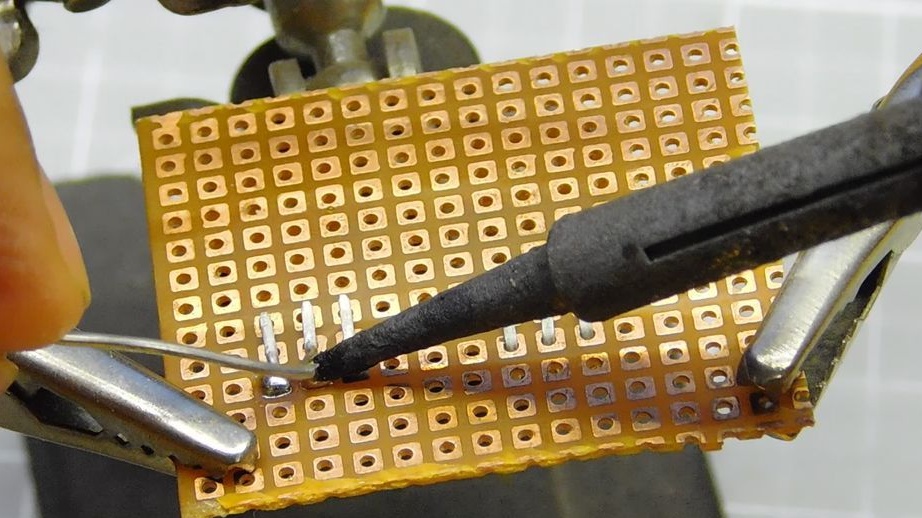
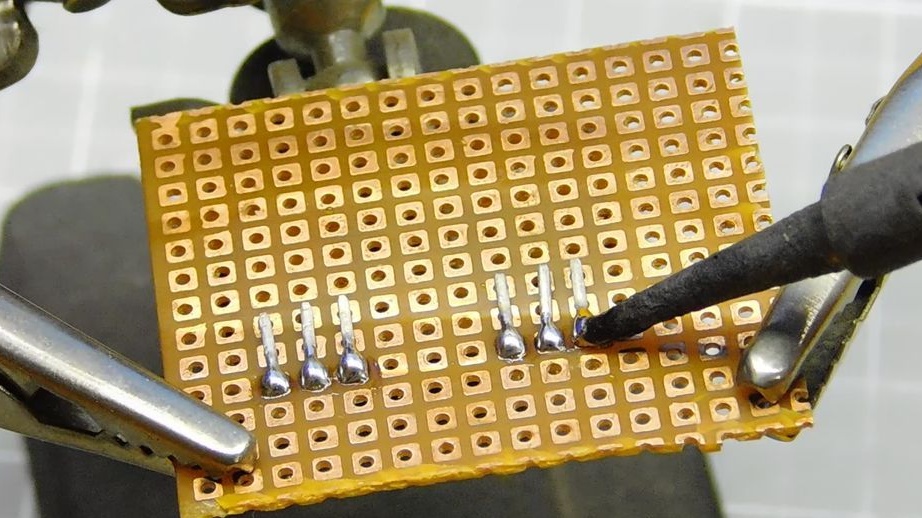
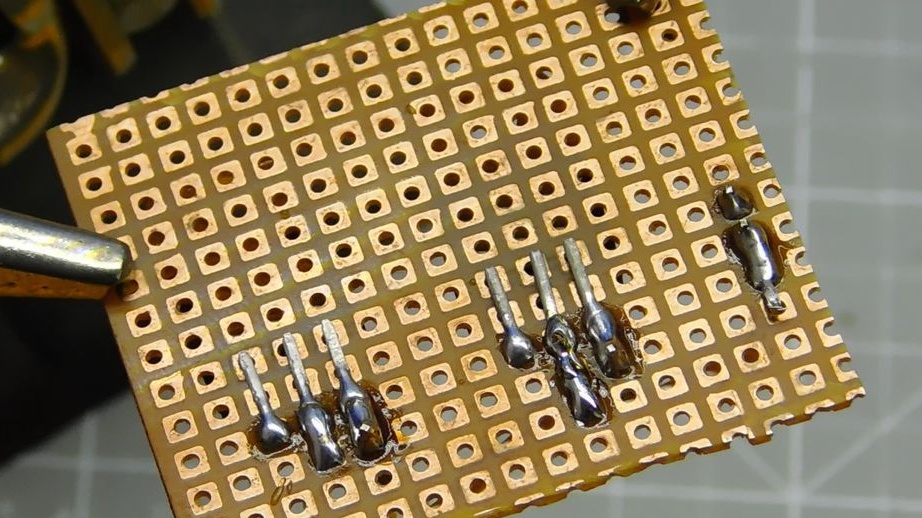
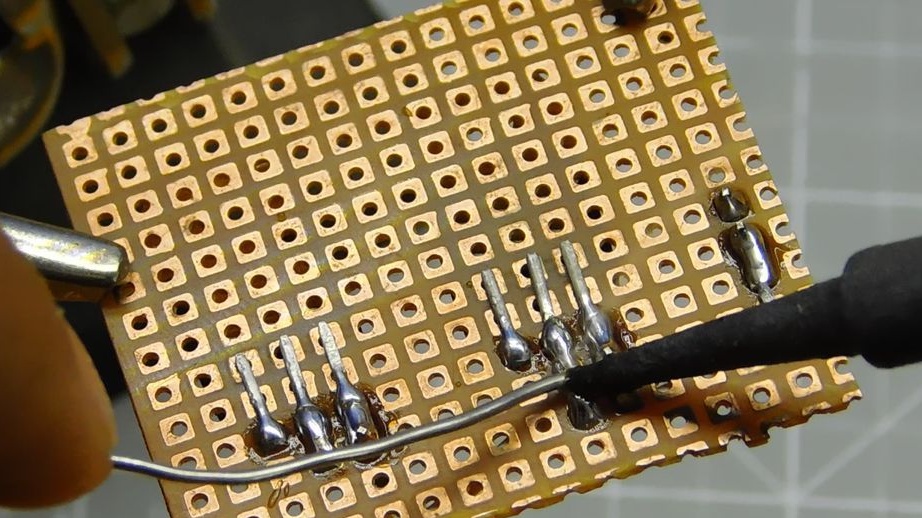
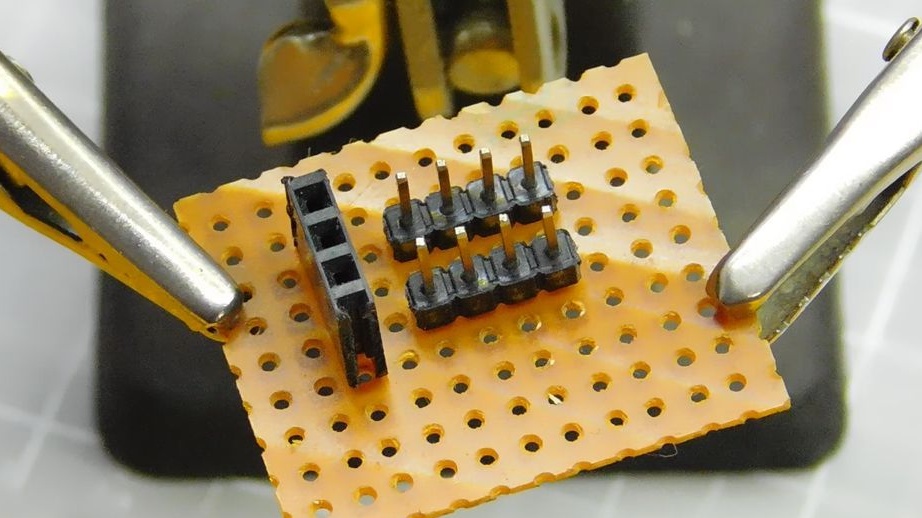
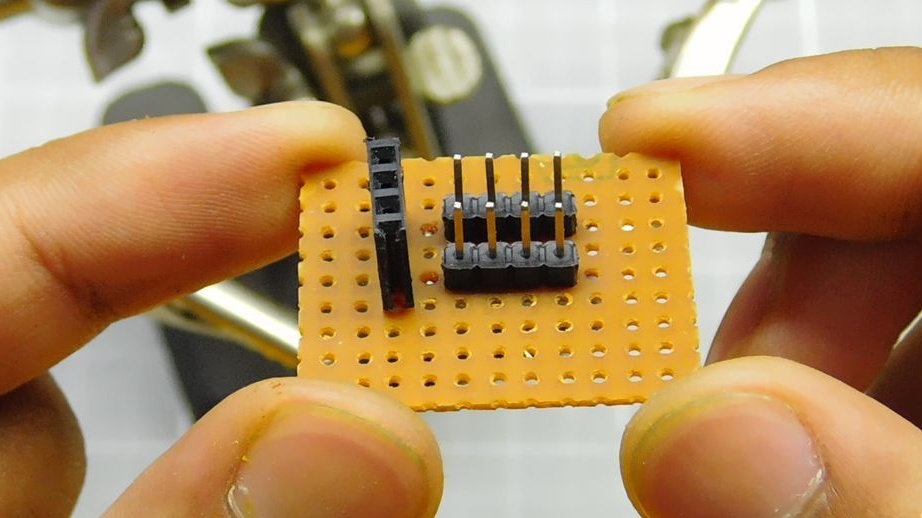
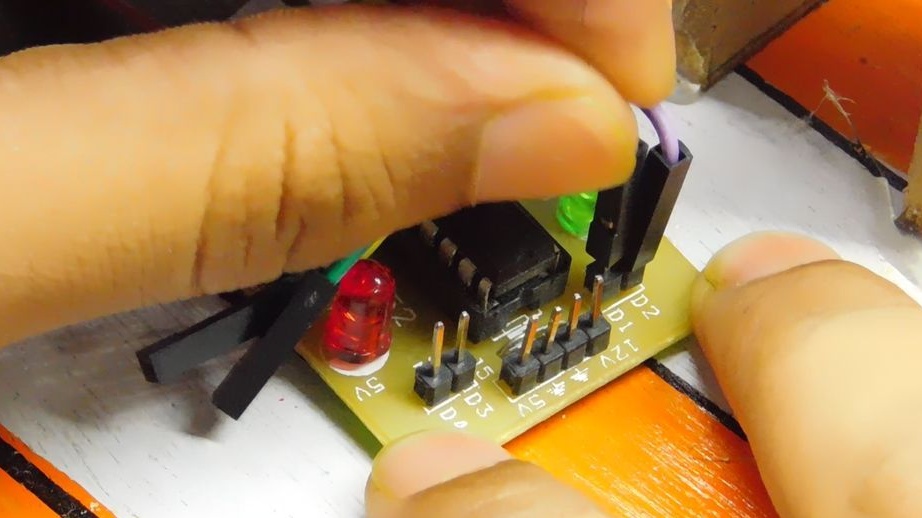
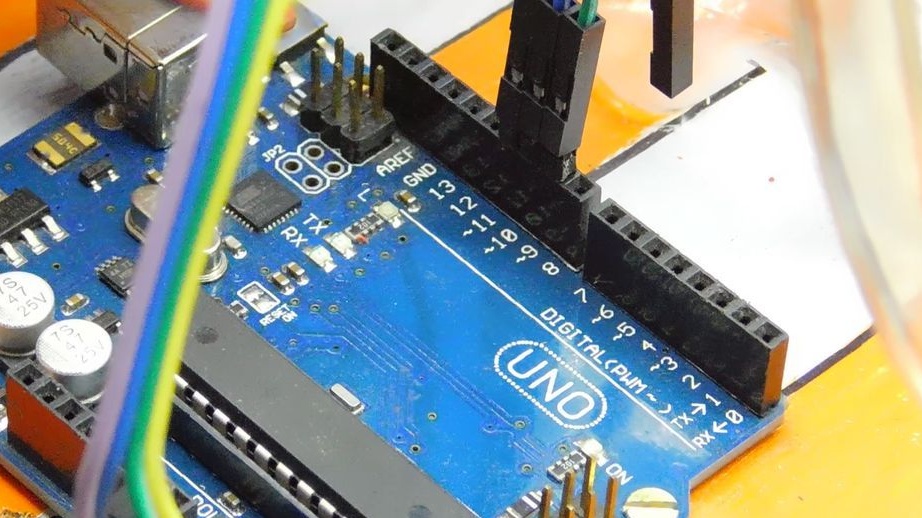
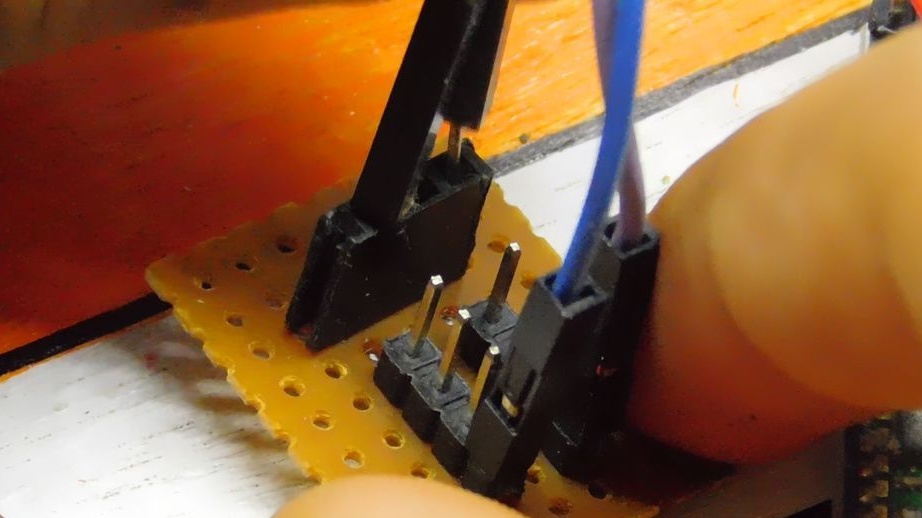
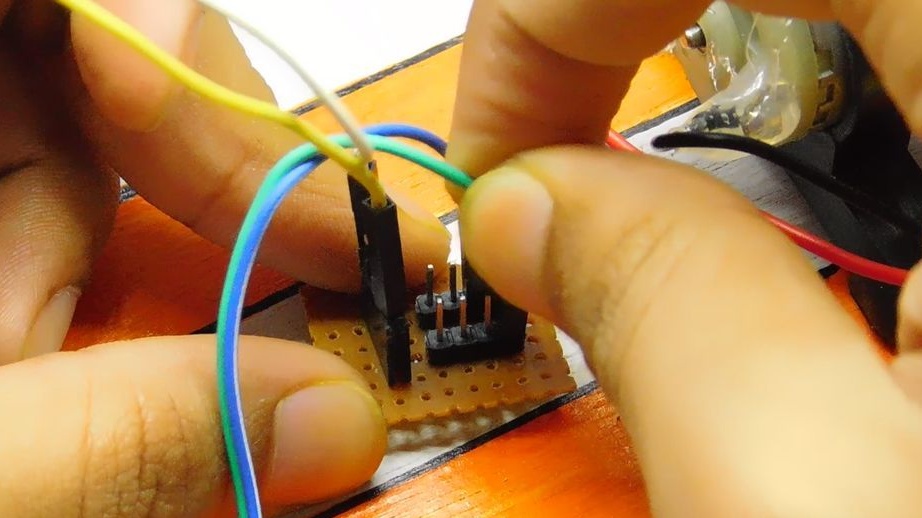
Bir su pompası ve motorlar için 12 V güç gereklidir, ancak Arduino sadece 5 V verdiğinden, master TIP122 transistöründeki devreyi toplar.Ayrıca, sihirbaz devre kartına birkaç + 5V ve Gnd pimi ekler.
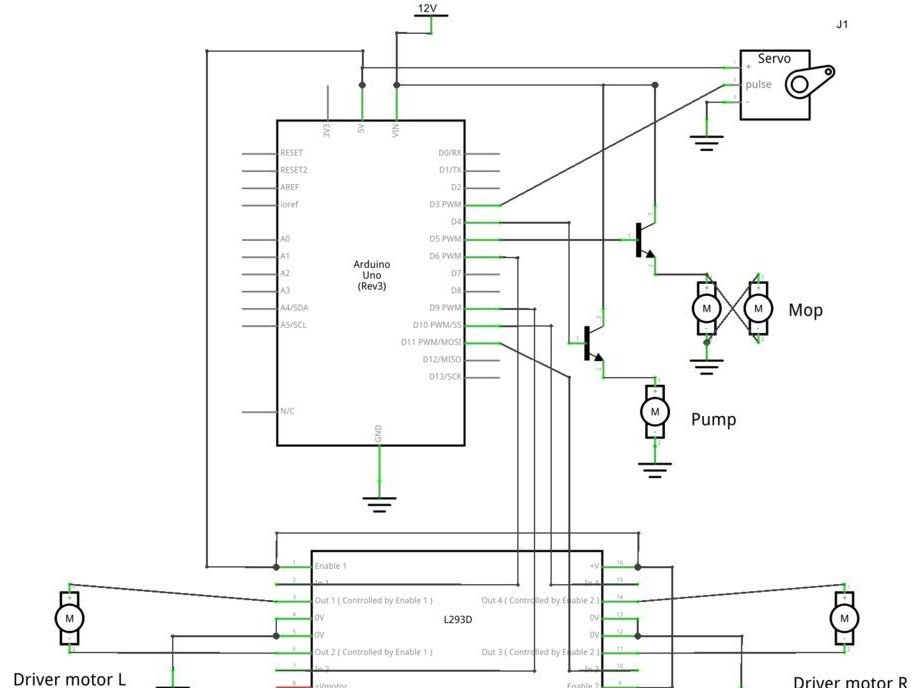
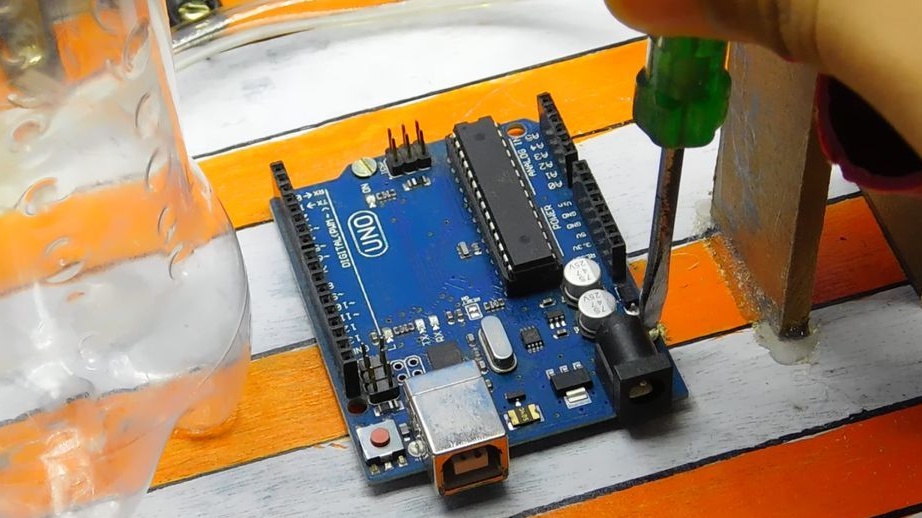
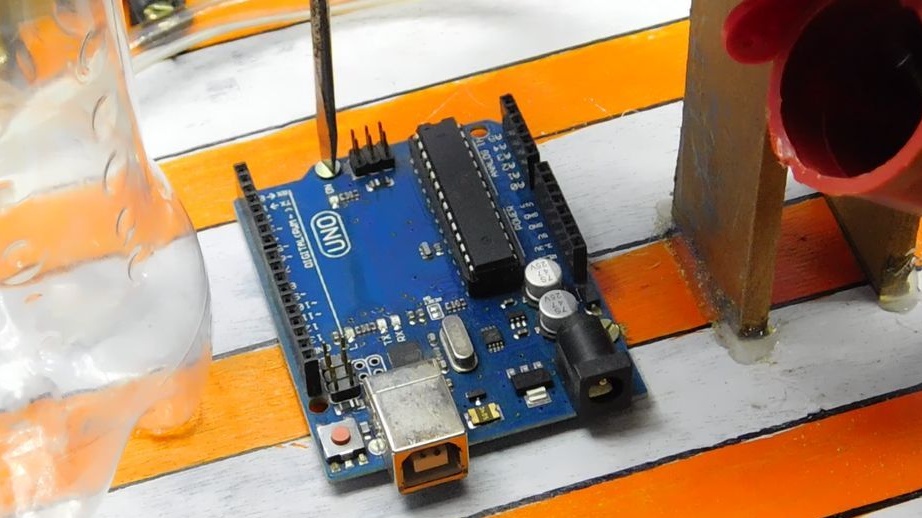
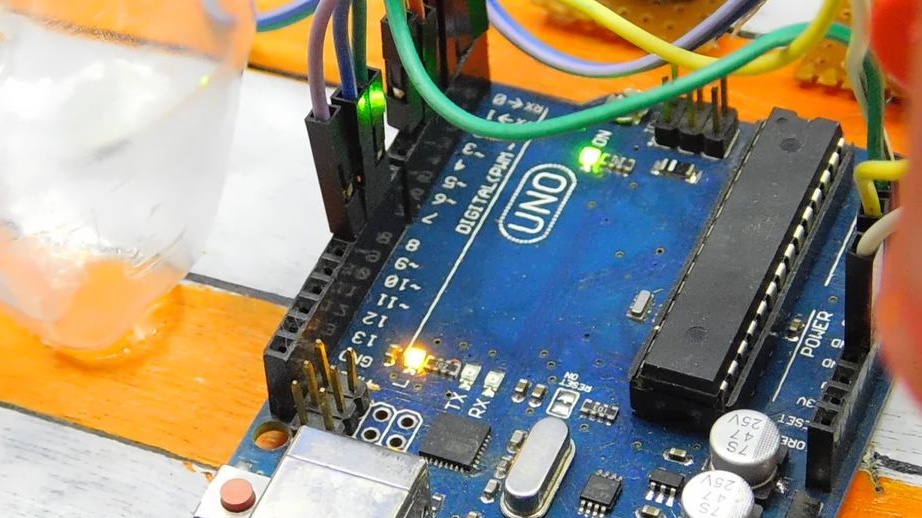
Beşinci Adım: Arduino Devresini Kurma
Arduino'yu platforma sabitler ve elektrikli cihazları panoya bağlar.
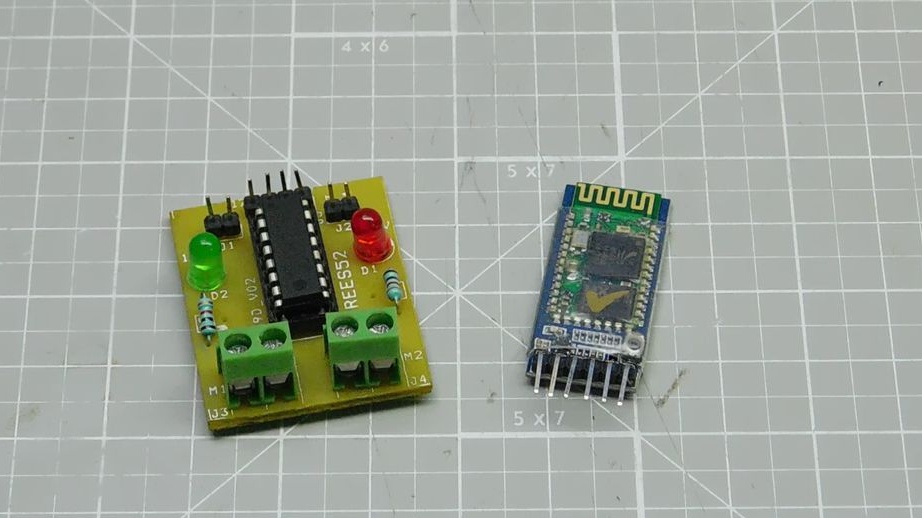
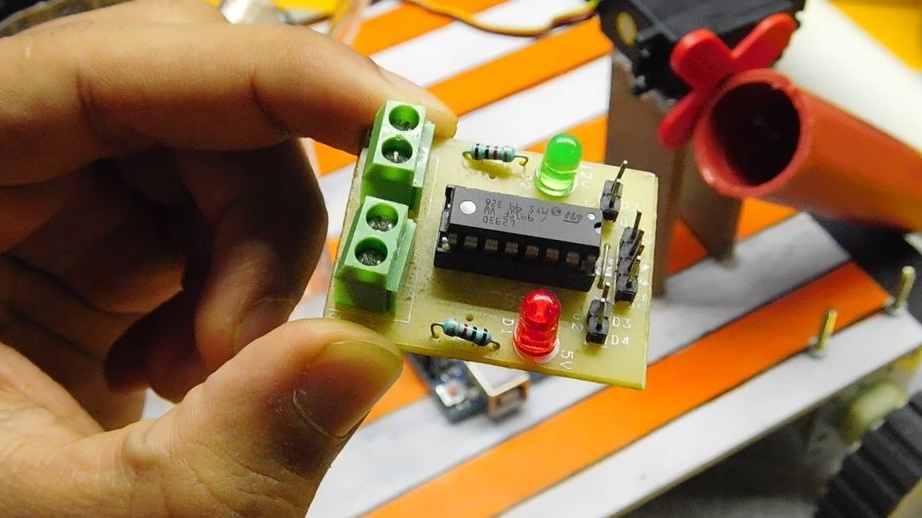
Motor kontrol modülü.
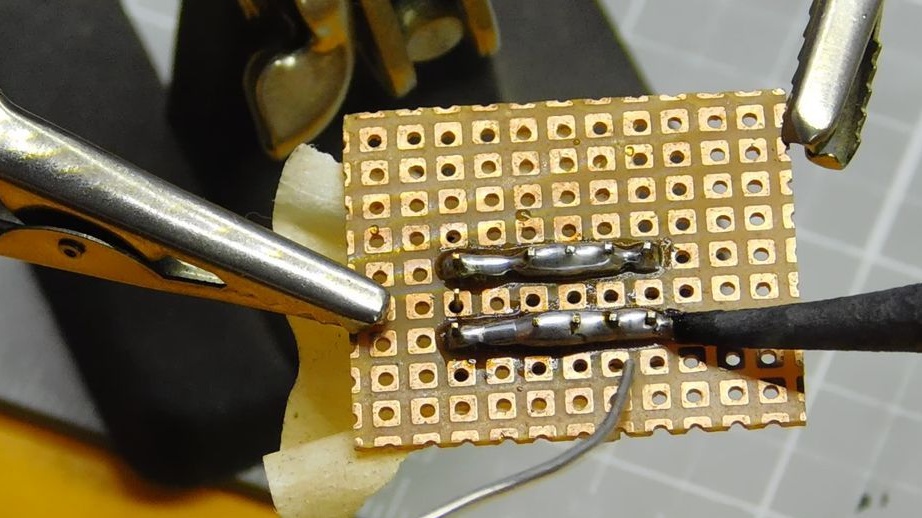
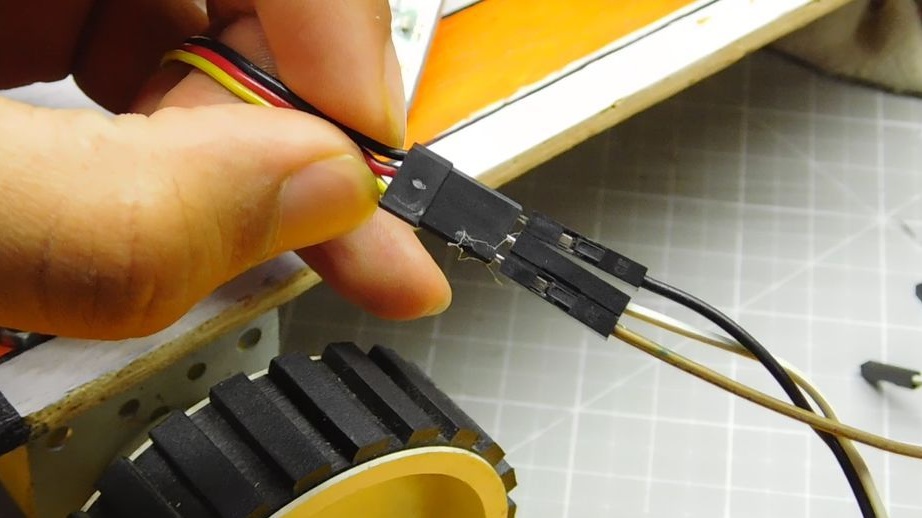
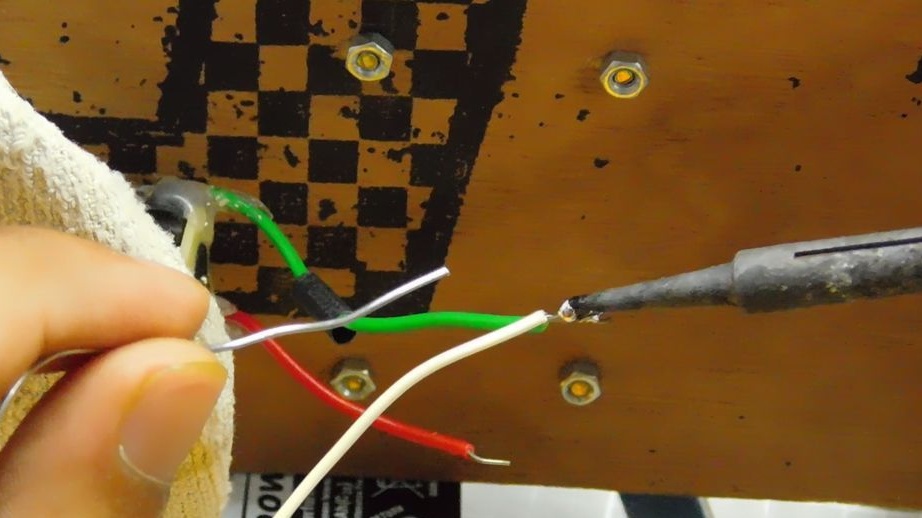
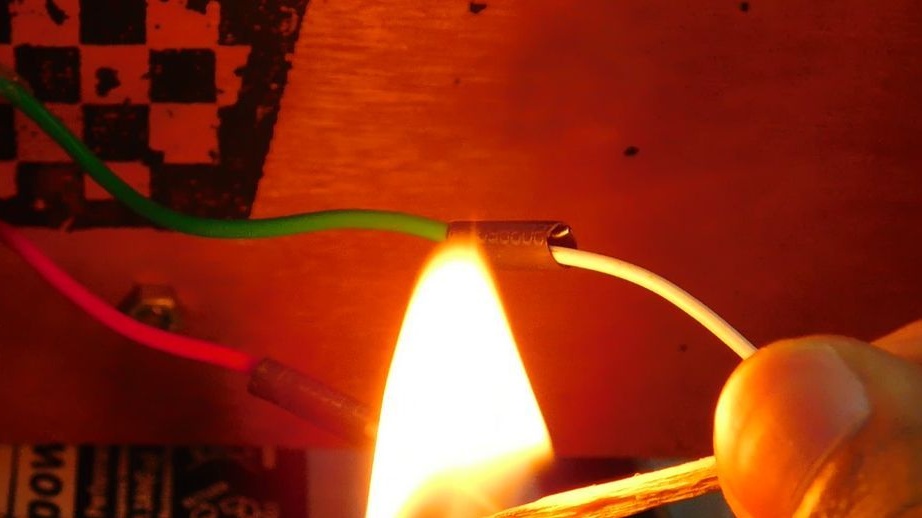
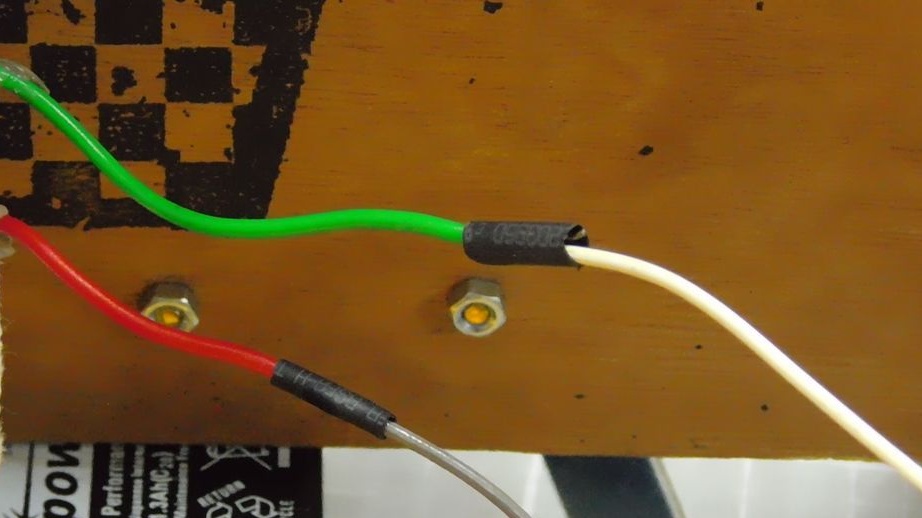
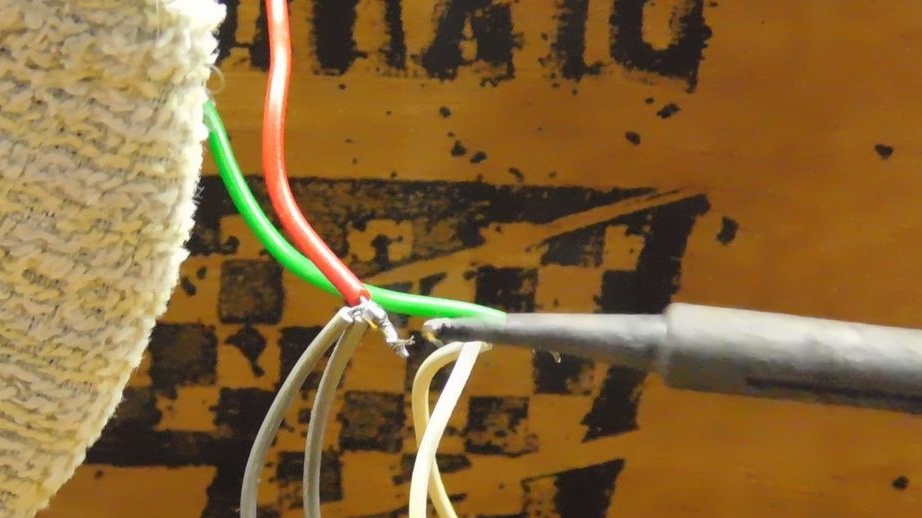
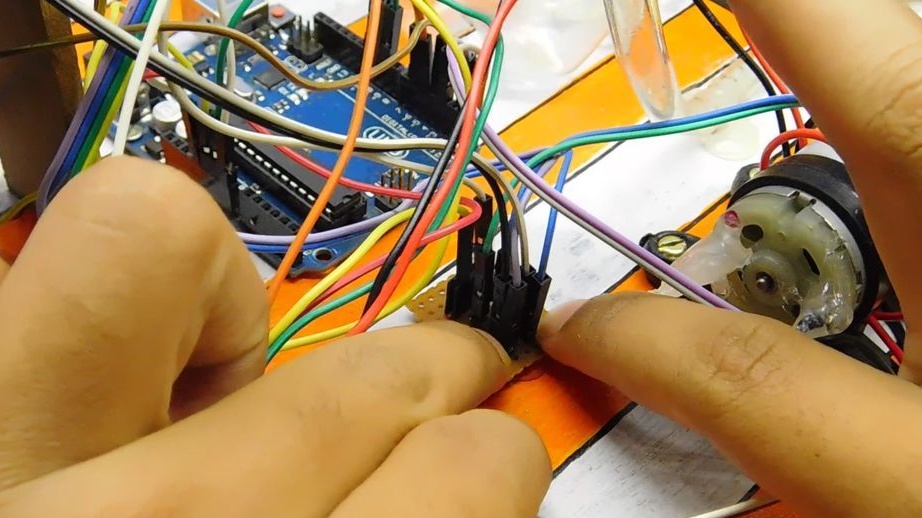
Motorlara (tekerleklerin fırça için değil, hareket için sabitlendiği) lehimler. Modül montaj soketlerindeki kabloları sabitler. Ardından, modülü Arduino ya aşağıdaki gibi bağlayın.
Modül ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Toprak -Gnd
+ 12V modülü aküye bağlanacaktır.
Bluetooth bağlantısı.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servo motor ::: Arduino
Vcc - + 5V
Gnd - gnd
Sinyal - D3
Daha sonra pompa ve fırça motorlarını şemaya göre bağlar. Fırça motorları paralel bağlanır ve saat yönünde ve saat yönünün tersine sola doğru farklı yönlerde döner.

Altıncı Adım: Robot Parçaları Bağlantı Elemanları
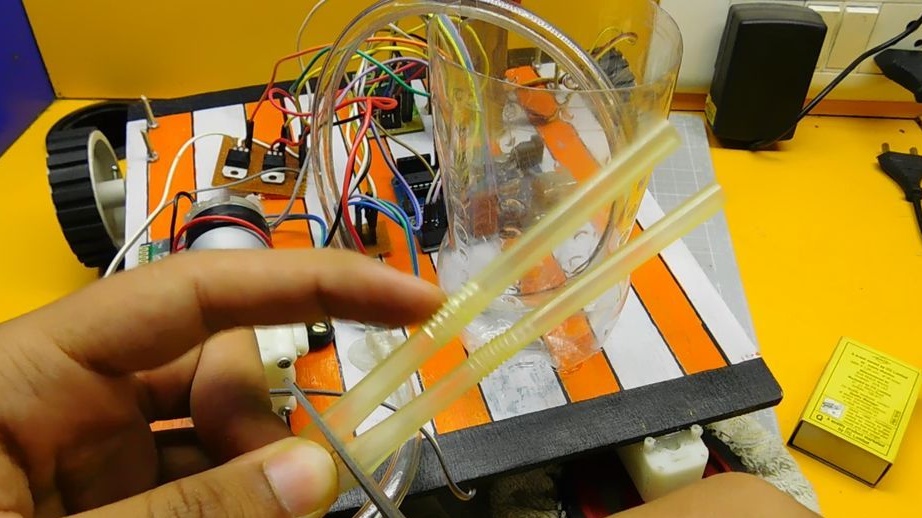
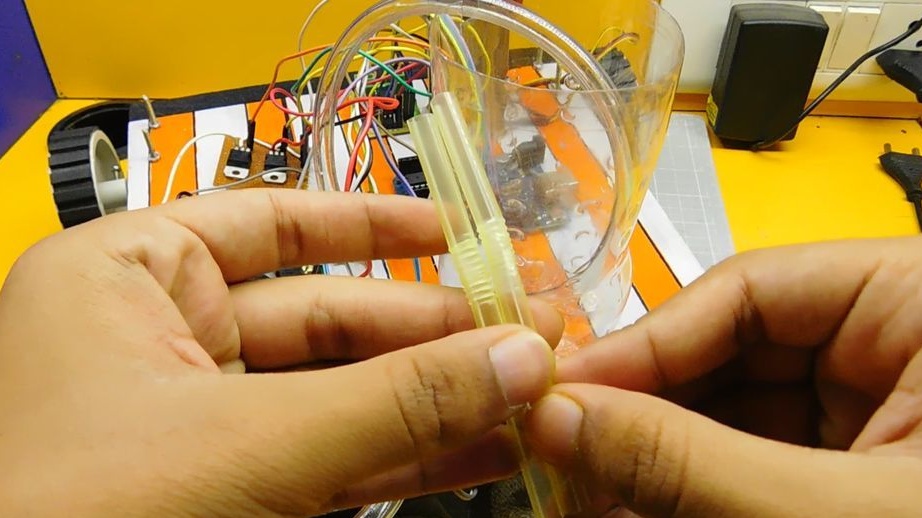
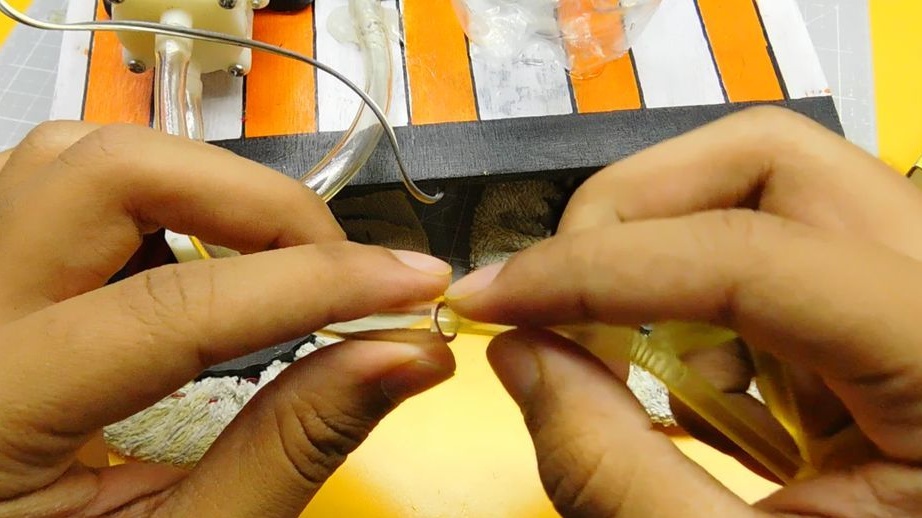
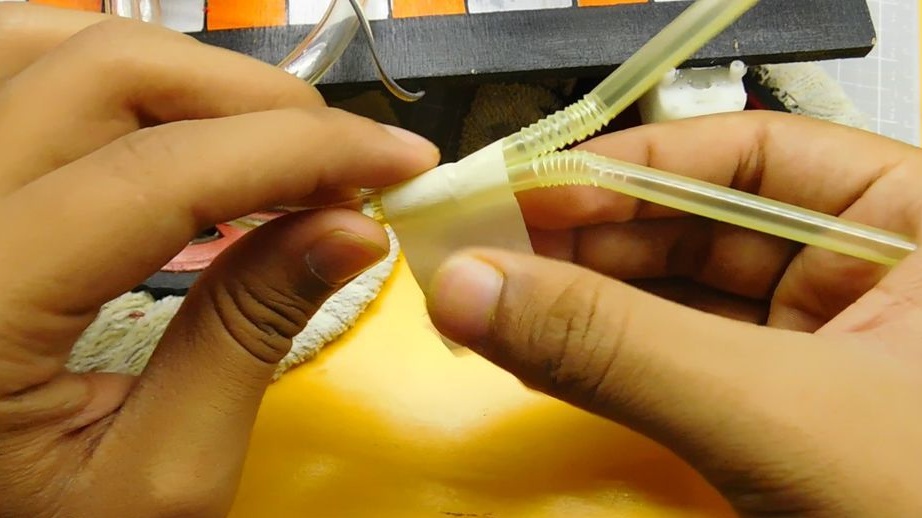
Her biri yaklaşık 7 cm olan iki kokteyl kamışını dilimler ve kamışları su besleme borusuna yerleştirir. Fırçaların önündeki çubukları sabitler.




Platform üzerindeki kilitler elektronik bileşenler.

Yedinci adım: Kodu indirin
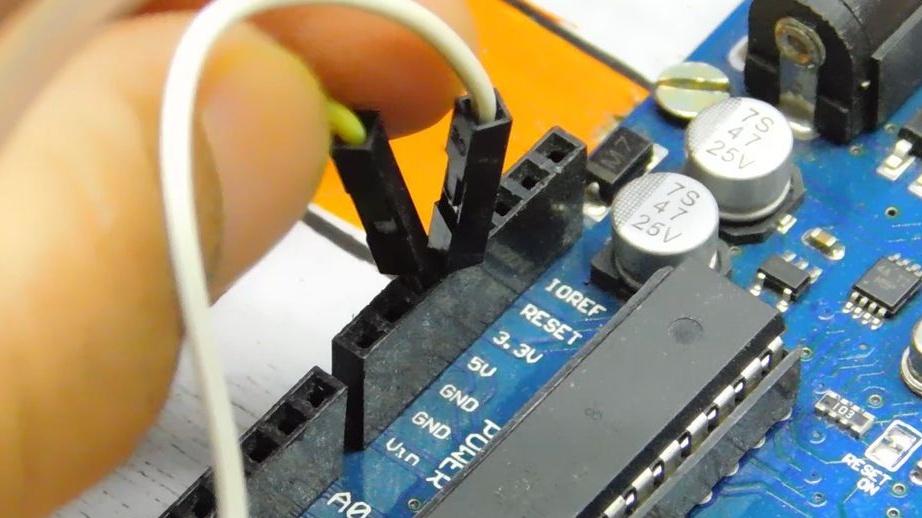
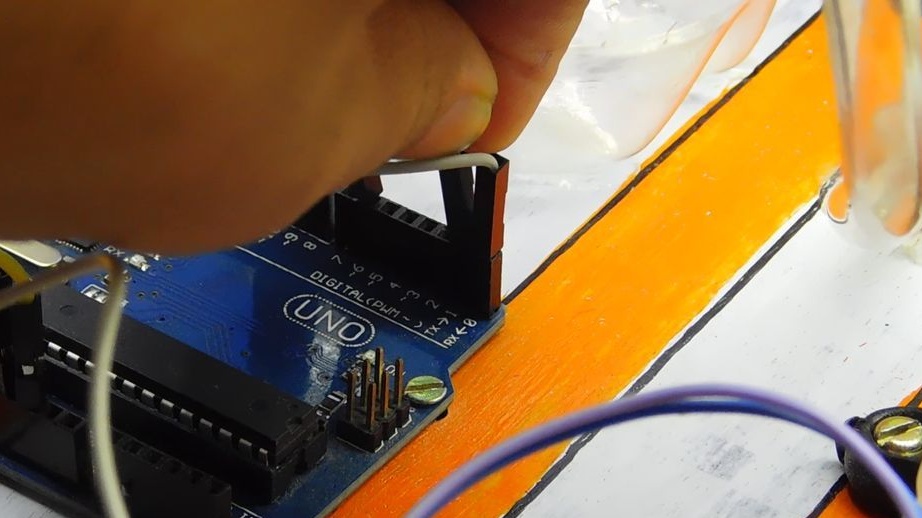
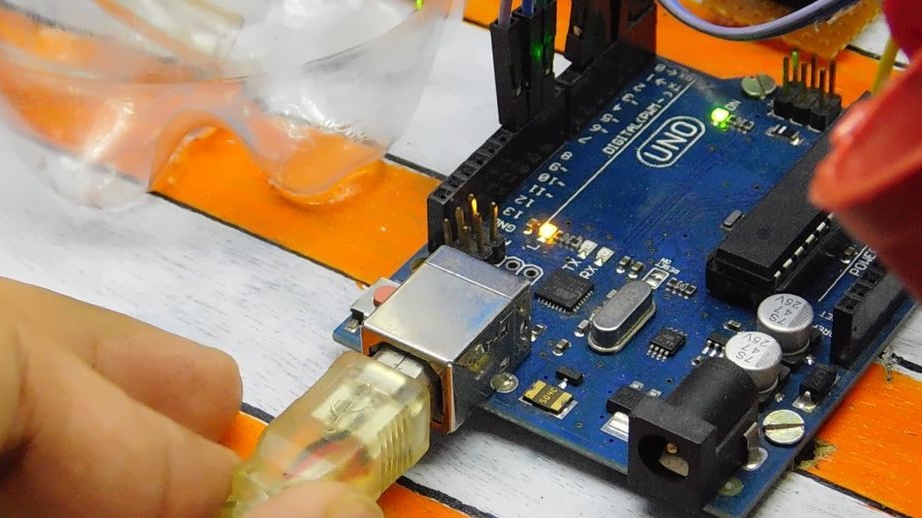
Arduino kartından Rx ve Tx atlama kablolarını kaldırır. Kartı bir bilgisayara bağlar. Kodu yükler. Jumper'ları yerine yerleştirir. .
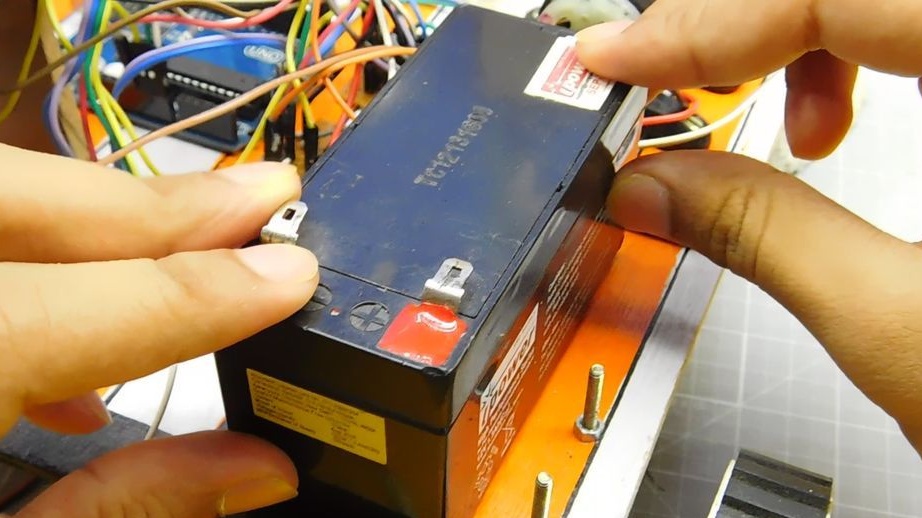
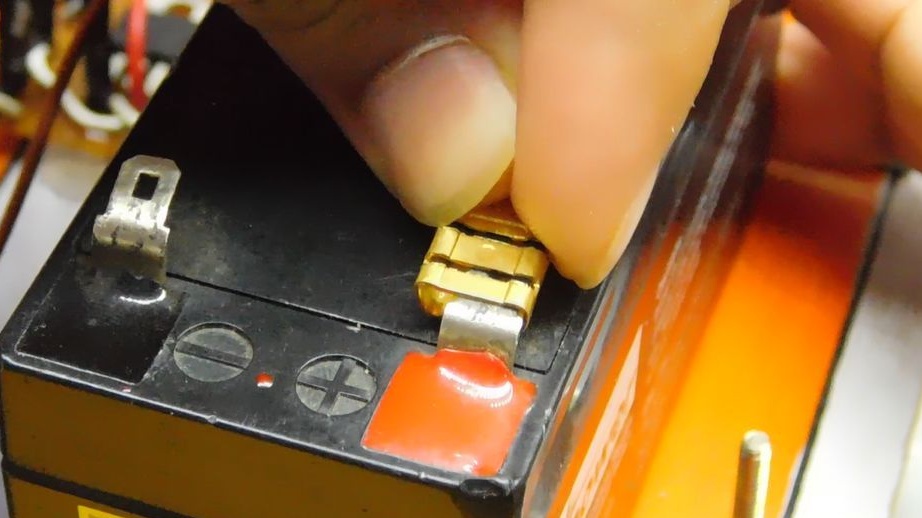
Sekizinci Adım: Pil
Platformdaki pili çift taraflı bant kullanarak sabitler. Elektronik aygıtları aküye bağlar. Arduino master bir voltaj bölücü üzerinden bağlanmayı önerir. Devreye bir anahtar da ekleyebilirsiniz.

Dokuzuncu adım: Robotu kontrol edin
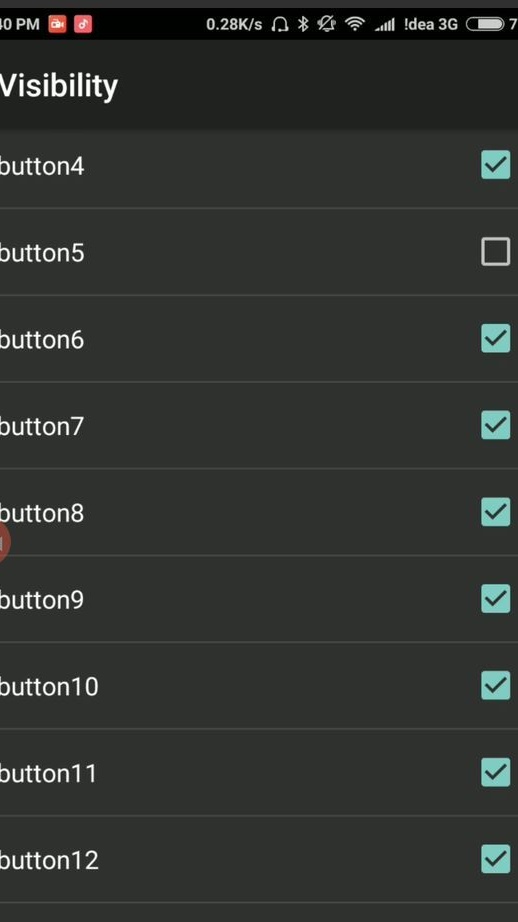
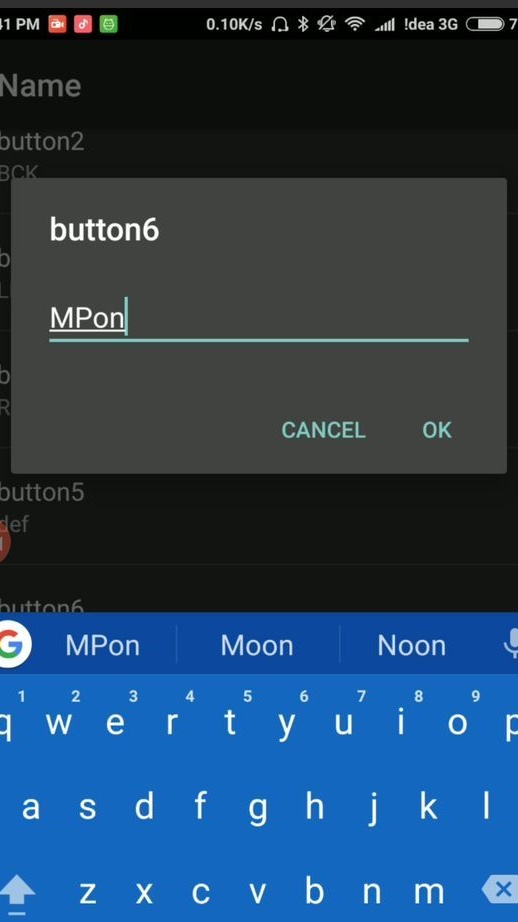
Google Play'den sihirbaz 'Bluetooth Seri Denetleyici' uygulamasını indirir. Uygulamayı açar. Ayarlar> görünürlük bölümüne gidin. 5, 9, 12 düğmelerini devre dışı bırakır. İsimlere gider. Her düğmeye 2-3 harflik bir düğme atar. Aşağıdaki fotoğrafa bakın.
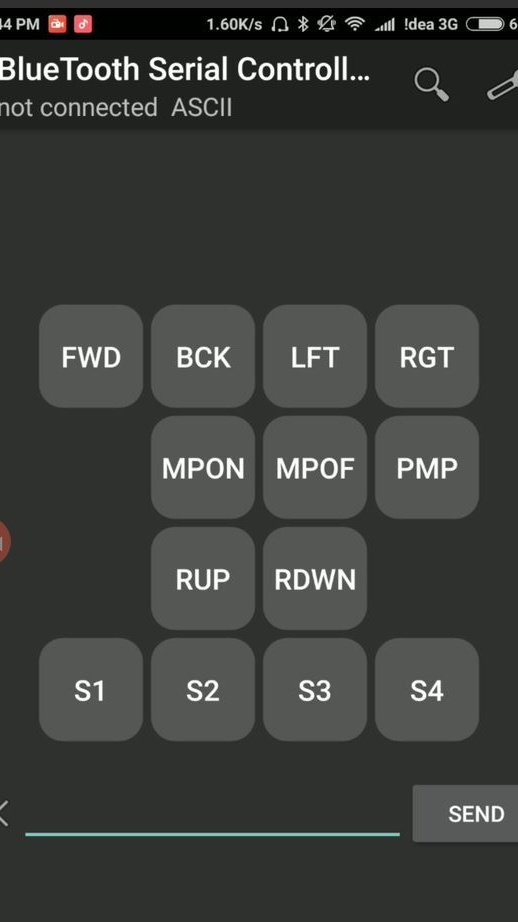
Daha sonra her düğme bir komut yükler (tırnak işaretleri kaldırılmalıdır, büyük / küçük harf değiştirmeyin):
Düğme 1 (FWD): 'F'
Düğme 2 (BCK): 'B'
Düğme 3 (LFT): 'L'
Düğme 4 (RGT): 'R'
Düğme 6 (MPON): 'M'
Düğme 7 (MPOF): 'm'
Düğme 8 (PMP): 'P'
Düğme 10 (RUP): 'U'
Düğme 11 (RDWN): 'u'
Düğme 13 (S1): '1'
Düğme 14 (S2): '2'
Düğme 15 (S3): '3'
Düğme 16 (S4): '4'
Durdurma komutları> komutlarında, yalnızca şu düğmelere komut atar:
Düğme 1: 'S'
Düğme 2: 'S'
Düğme 3: 'S'
Düğme 4: 'S'
Düğme 8: 'p'

Artık bluetooth modülüne ("HC-05") bağlanmakta, şifreyi (1234 veya 0000) girmeye devam ediyor ve odayı temizlemeyi deneyebilirsiniz -)))
Master-master sayesinde, robotu geliştirmesini ve ondan tamamen bağımsız bir çalışma elde etmesini diliyoruz.
Robot temizleyicinin tüm montaj süreci videoda görülebilir.