
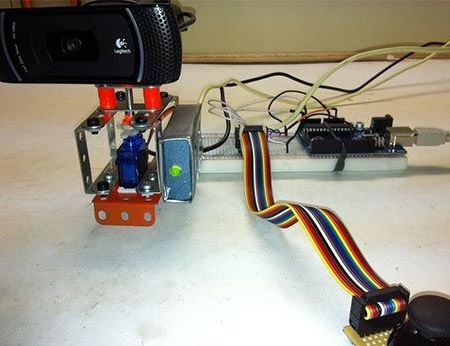
Bu makale nasıl kullanılacağı hakkında konuşacak Arduino web kamerasını kontrol edebilir. Daha kesin olarak, kontrol, web kamerasının önceden monte edileceği tasarımcıdan çerçeveye monte edilen bir servo sürücü olacaktır.
Bu cihazı oluşturmak için yazar tarafından kullanılan malzemeler:
1) metal yapıcı
2) soğuk kaynak
3) web kamerası
4) Servo
5) LED'ler
6) Arduino
8) PS3'ten joystick
Kamerayı kontrol etmek için bir cihaz oluşturmanın tasarımını ve ana noktalarını daha ayrıntılı olarak düşünün.
Yanıp sönen ışıklar gibi standart işlevlere ek olarak böyle uygun bir Arduino platformunun nasıl kullanılacağı sorusu şaşkın. İş yerinde bir meslektaşı ile Skype üzerinden sohbet ettikten sonra, yazar ilginç bir fikir buldu. İş arkadaşlarına bir web kamerasını kontrol etme ve ofiste neler olduğunu izleme fırsatı verirseniz ne olur. Söylenenden daha erken söylenmedi ve yazar bu fikrin uygulanması üzerinde çalışmaya başladı.
Başlangıçta yazar, Arduino platformunda oluşturulan birimleri kontrol etmek için bir joystick kullanılan makalelerin ana malzemelerini inceledi. Bu makalelerin materyalini anlayan yazar, servo hareketlerini ondan kontrol etmek için PS3'teki eski joystick'i kullanabileceğini fark etti.
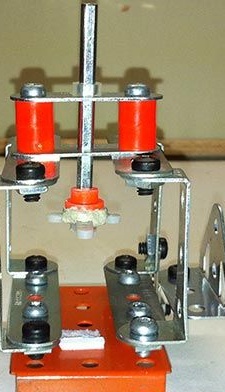
Oluşturmaya başlayarak yazar, servo sürücünün ve kameranın kendisinin yerleştirileceği bir çerçeve oluşturmaya karar verdi. Görevi karmaşıklaştırmamak için yazar, tasarruf mağazasında satın aldığı normal metal yapıcıyı kullanmaya karar verdi.
Bu kurucunun ayrıntılarını alarak, gelecekteki cihazın böyle bir çerçevesini oluşturduğu ortaya çıktı:
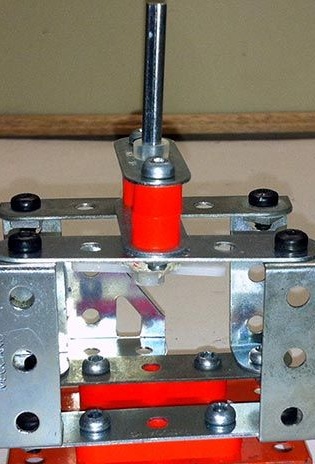
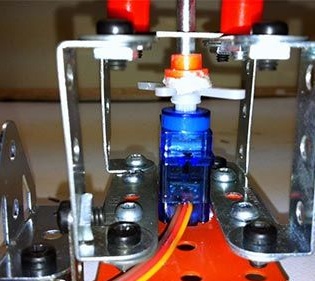
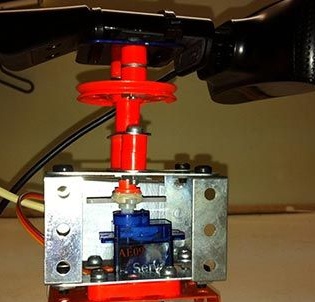
Çerçevenin içine bir servo sürücü takıldı. Fotoğraftan görülebileceği gibi, oluşturulan çerçeveye mükemmel uyum sağlar. Servoyu çerçeveye sabitlemek için yazar çift taraflı bant kullandı. Soğuk kaynak kullanarak, servo şaft, platformun kamera ile hareketini kontrol eden dişliye bağlandı.
Şanzıman tasarımının gereksiz yük olmayacak şekilde bile yapılmasını sağlamak önemlidir.
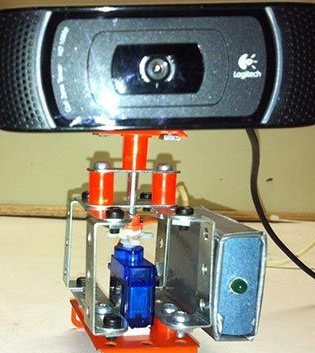
Sonra yazar web kamerasını kurmaya başladı. Yazarın çalıştığı şirketin ofisinde kullanılan bir Logitech kamera kullanıldı. Bu nedenle, kameranın yazara ait olmadığı gerçeği nedeniyle, gelecekteki cihazın tasarımını basitleştirmesine rağmen, onu sökmedi ve karşı ağırlığı kaldırmadı.

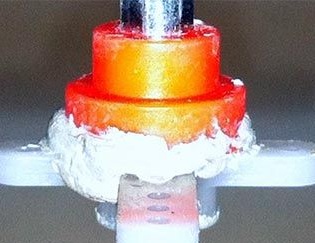
Kameranın ağırlığını bir şekilde telafi etmek ve yapının ortasına dağıtmak için yazar 2 kalın conta kullandı. Bölmenin ağırlığını servo şafttan ana çerçeveye kaydırmanıza ve şaftın bölmenin üzerindeki basıncından kaçınmanıza izin verir.
Kamera, servo sürücüden gelen bir mile dayanan özel bir yuvarlak platform üzerine monte edilmiştir. Bu şekilde, kamera kontrolü bir çapraz iletim vasıtasıyla gerçekleştirilir.
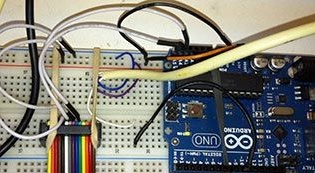
Yapının mekanik kısmı hazır olduktan sonra yazar elektronik doldurma.
Başlangıç olarak, sistemin durumunu gösterecek servo ve LED'leri bağlamaya karar verdi.
Servonun kendisinde 3 kablo vardır: -GND, + 5V ve Sinyal. Yazar, sürücüyü kontrol etme yeteneğini gerçekleştirmek için 9 iğne kullandı. Bir sürücü etkinleştirme göstergesi yapmak için, yazar iki kabloya bağlı bir diyot taktı: + 5V hattında bir direnç ile + 5V ve GND.

Daha sonra, internetteki makalelere dayanarak, yazar sürücüyü kontrol etmek için PS3'ten kırık bir joystick hazırladı.

Daha sonra yazar Arduino için bir program seçti, bu sayede servoyu kontrol etmek için joystick'i ve USB portunu kullanmak mümkün oldu. Bir USB portu ile iletişim kurmak için yazar modem kontrolü ve Minicom veya Putty gibi bir uygulama terminal emülatörü kullandı.
Bu program kamerayı kontrol etmek için çeşitli işlevler sağlar.
Kamerayı merkeze 90 derece monte etmek için "m" tuşuna basmalısınız, servo gücü açıldığında kamera da otomatik olarak bu konuma gelecektir. Kamerayı sola döndürmek için "F" tuşuna basmak gerekir ve "J" düğmesine basarak kamera sağa döndürülür.
Programı makalenin sonunda indirebilirsiniz.
Yazar özellikle kamera döndürme cihazı için tasarım yapmadığı için, bazı dezavantajları olmaya başladı.
Örneğin: kamera çerçeveye sabitlenmediğinden, eğildiğinde platformdan düşebilir; servo oldukça küçük olduğundan, kameranın torku ek rotasyon oluşturur, bu da servoyu deforme eder; servo şaftın delikleri çok büyük olduğundan statik değildir ve ayrıca strese maruz kalır.
Bu nedenle, gelecekte yazar cihazı aşağıdaki gibi hafifçe yükseltmek istiyor: kamera dönüşünün düğmelerle değil, joystick'in oklarıyla kontrol edildiğinden emin olun; viraj alırken servo üzerindeki yükü hafifletir.