

Robotları modellemeye ve inşa etmeye devam ediyorum. Uzaktan kumanda oluşturma talimatları zaten yazdım modeller ve robotlar. Uzaktan kumanda eski Sega kumanda kolunu temel alır. Bu joystick, bir makineyi veya küçük bir robotu kontrol etmek için yeterli dört ok ve 8 düğmeye sahiptir. Yönetim, bir IR LED ile gerçekleştirildi. Bugün bu uzaktan kumandanın modernizasyonu için talimatlar yazacağım, yani bir Bluetooth uzaktan kumandaya dönüşümü. Kullanılan Bluetooth modülüne bağlı olarak, uzaktan kumanda önceden programlanmış bir cihaza bağlanır veya uzaktan kumandaya bağlanabilir. Her iki seçeneği de açıklayacağım. İhtiyacımız olacak:
- Sega'dan kumanda kolu
- Arduino Pro Mini 3.3v 8MHz
- USB-TTL
- 2 Ni-Mn pil 1.2v 1000mA
- Bluetooth modülü HC-05 veya HC-06
- Kırmızı LED
- Mavi LED
- Direnç 2x75Om, 2x5Om, 1x2Om
- Konnektör PLSx5 "anne"
- Sıcak tutkal
- teller
- 4xAAA pil bölmesi
- Çok renkli teller
- Havya, lehim, reçine
- düz kollar
Adım 1 Bluetooth Modülü Seçme
İletişim için iki modül gereklidir. Uzaktan kumandaya bir tane ekleyeceğiz ve ikincisi daktiloya veya robot. Çok sayıda Bluetooth modülü var. İşlevlerde ve desteklenen iletişim protokollerinde farklılık gösterirler. Bulunan modüllerin örnek bir listesi:
- BC417143 yongası üzerindeki HC-03, HC-04 (HC-04-M, HC-04-S);
- BC417143 yongası üzerindeki HC-05, HC-06 (HC-06-M, HC-06-S);
- HC-05-D, HC-06-D;
- HC-07 - CSR 41C6 yongalı modül;
- HC-08 - ultra düşük güç tüketimi ve Bluetooth 4.0 protokolüne sahip modül;
- HC-09, HC-06 ve HC-07'nin yerini almak üzere tasarlanmış en yeni modüldür.
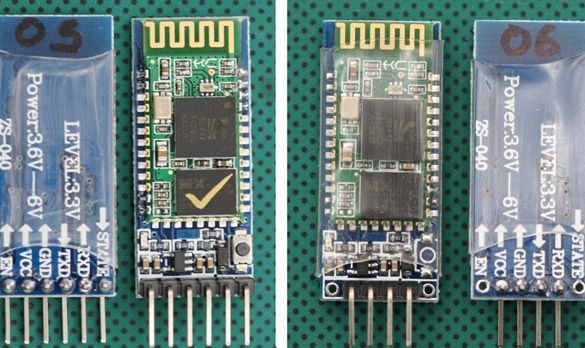
Fiyat / işlevsellik açısından optimum oldukları için iki HC-05 ve HC-06 modülüne karar verdim. İletişim protokolünü destekler - Bluetooth Spesifikasyonu v2.0 + EDR. Menzil 10 metreye kadar (güç seviyesi 2). SPP'yi destekleyen tüm Bluetooth adaptörleri ile uyumludur. Flash bellek (bellenim ve ayarları saklamak için) 8 Mbit'tir. Bir radyo sinyali frekansında çalışırlar - 2.40 .. 2.48 GHz. Ana bilgisayar arayüzü USB 1.1 / 2.0 veya UART'tır. Düşük güç tüketimine sahiptirler - iletişim sırasındaki akım 30-40 mA'dır. Ortalama akım değeri yaklaşık 25 mA'dir. Bağlantı kurulduktan sonra akım tüketimi 8 mA olur. Bu modülleri bulmak kolaydır, en yaygın olanlarıdır. Modüller çok benzer, ancak aralarındaki ana fark, HC-05'in hem ana modda hem de bağımlı modda çalışabilmesidir.HC-06 sadece bir köle olabilir. Basitçe söylemek gerekirse, HC-06 eşleştirilmiş bir cihazı algılayamaz ve onunla bağlantı kuramaz; sadece efendiye itaat edebilir. Modüller birbirine lehimlenmiş iki pano olarak satılmaktadır. Küçük olan fabrika modülüdür. Büyük - DIY için özel bir breadboard. BC417 yongalı daha küçük bir tahta gibi görünüyor:

Ve böylece DIY modülleri HC-05 ve HC-06 kendileri:
Breadboard'suz bir modül satın alabilirsiniz. Biraz daha ucuza mal oluyor, ancak daha sonra modül için 3,3 V voltaj regülatörü takmanız gerekecek. Ayrıca, kontaklar arasındaki mesafe küçüktür ve tel modülüne lehimleyerek kendinizi eziyet etmeniz gerekecektir.
Uzaktan kumanda ile robot veya makine arasında iletişim kurmak için üst üste iki Bluetooth modülü yapılandırmanız gerekir. Bu durumda, HC-05 modülünü HC-06'yı bulup bağlanacak şekilde yapılandırırız.
Adım 2 HC-06'yı yapılandırın.
İlk önce HC-06'yı bilgisayara bağlamanız gerekir. Bu, modülü bir USB-UART adaptörü ile bağlayarak yapılabilir. Bu durumda, bağlantı aşağıdaki gibidir:
Bluetooth - USB-UART
TX - RX
RX - TX
VCC - +5
GND - GND
Elinizde USB-UART yoksa, herhangi bir Arduino kartına aşağıdaki çizimi yazabilirsiniz:
Aşağıdaki gibi bağlayın:
Bluetooth - Arduino
TX - pim 2
RX - pim 3
VCC - +5
GND - GND
Daha sonra herhangi bir terminal programını açıyoruz, HC-06'nun bağlı olduğu bağlantı noktasını seçiyoruz, varsayılan hız 9600, NL ve CR gerekli değil. HC-06 ile bir Bluetooth bağlantısı kurulmazsa, modül AT komutlarını girme modundadır. Modül yanıt vermezse, pozitif kabloyu çıkarıp yeniden bağlayarak aşırı yüklemeyi deneyin. Ve aşağıdaki komutları girin:
"AT" - tırnak işaretleri olmadan, "Tamam" cevabı gelmelidir.
“AT + ADDR” - bu komutla HC-06'nın benzersiz adresini bulacağız, bu adresi yazacağız
"AT + BAUD7" - hızı 57600 olarak ayarlayın
"AT + RESET" - modülü aşırı yüklüyoruz
Aşağıdaki komutların girilmesi gerekmez, ancak bunları tanımanın daha iyi olması durumunda:
"AT + NAME
“AT + ORGL” - modülü fabrika ayarlarına sıfırlama
Bu HC-06 kurulumunu tamamlar.
Adım 3 HC-05'i yapılandırın.
Modülü HC-06'ya benzer şekilde bağlarız. Daha sonra, herhangi bir terminal programını açın, USB-UART veya Arduino'nun asılı olduğu com portunu seçin, fabrika varsayılan iletişim hızı 9600'dür, ancak 38400 hızında da tanıştım, değiştirmediyseniz 9600'ü seçin, bağlanamazsınız, 38400'e geçin. NL ve CR parametrelerini eklemeye değer. AT komut giriş modunu aktarmak için HC-05 kartındaki düğmeye basmanız ve ardından aşağıdakileri girmeniz gerekir:
"AT" - tırnak işaretleri olmadan girilir, "OK" cevabı gelmelidir. Gelirseniz, komutları daha fazla girmeye devam ediyoruz.
“AT + ROLE = 1” - bu komutla modülün rolünü rakamla belirledik:
0 - slave, 1 - master, 2 - slave döngüde *. "+ ROL: 1 \ r \ n" veya "OK" yanıtını almalısınız.
“AT + CMODE = 0” - master'ın rolündeki modül yalnızca adresi “AT + BIND” ile gösterilen Bluetooth cihazına bağlanır.
“AT + BIND: 1234,56,123456” - HC-06'nızla bağlantı kurmak için adresini buraya girmeniz gerekir. Tüm komutları girdikten sonra, modül ana rol oynar (ROLE = 1) ve sabit adrese bağlantı modu (CMODE = 0) ayarlanır, sadece adresi bu komutla belirtilen Bluetooth cihazına bağlanır. Adresin bazı bölümleri girilir: kurulum sırasında - virgülle ayrılmış ve yanıtlandığında - iki nokta üst üste üzerinden. "+ BIND: 1234: 56: 789ABC \ r \ n" veya "OK" yanıtını alacaksınız.
“AT + UART = 57600,0,0” - hızı 57600 bps olarak ayarlayın, durma biti şu sayı ile temsil edilir: 0 - bir, kontrol şu sayı ile temsil edilir: 0 - doğrulama olmadan
Modül ayarları konusunda kafanız karıştıysa veya düzgün çalışmıyorsa, aşağıdaki komutu deneyin:
“AT + ORGL” - Modül aşağıdaki ayarları sıfırlar CLASS = 0, IAC = 9e8b33, ROLE = 0, CMODE = 0, UART = 38400,0,0, PSWD = 1234, NAME = hc01.com.
Ardından, ihtiyacınız olan ayarları yeniden yapılandırın.
Bu şekilde, HC-05 ve HC-06 arasında güçlü bir bağlantı oluşturduk. HC-05 modülleri açıldığında, HC-06 ile bir bağlantı kuracaktır. Kişisel deneyimlerden önce HC-05'i ve sonra HC-06'yı açmanın daha iyi olduğunu söyleyebilirim. Bağlantı kesilirse, her iki modülü de aşırı yüklemeniz gerekir.
Adım 4 Uzaktan kumandanın hazırlanması.
Bu adım, aşağıdaki talimatlarda ayrıntılı olarak açıklanmaktadır:
https://trm.imdmyself.com/8626-ik-pult-iz-dzhoystika-ot-sega.html
Adım 1 ila 4'ü gerçekleştirmek gerekir. IR diyotunun lehimlenmesi, müdahale etmemesine rağmen isteğe bağlıdır.
Adım 5 Bir Bluetooth modülünün bağlanması.
Uzaktan kumandaya HC-06 takmanızı öneririm. Modülün ayarlarını değiştirmek için sadece Arduino Pro Mini'deki ilgili çizimi doldurmanız gerekir. HC-05 durumunda, AT komut moduna geçmek için düğmeye basmak için uzaktan kumandayı sökmeniz gerekecektir.Her şeyi aşağıdaki şemaya göre bağlarız
Kumanda Kolu - Arduino
Yukarı ok - pim 2
Aşağı ok - pim 4
Sol ok - pim 5
Sağ ok - pim 6
Düğme A - pim 8
Düğme B - pim 10
C düğmesi - pim 7
X düğmesi - pim 12
Y düğmesi - pim 11
Z düğmesi - pim 9
Başlat Düğmesi - pim 14 (A0)
Sıfırlama Düğmesi - RST
Genel - GND
Bluetooth - Arduino
TX - pim 16 (A2)
RX - pim 17 (A3)
VCC - + 5
GND - GND
HC-05 kontrol edeceğiniz daktilonuza veya robotunuza bağlanıyoruz. Bağlantı seçenekleri ve çizimler diğer yönergelerimde bulunabilir. Bir robot çizimi yazarken, bağlantı hızını 57600 olarak ayarlamanız ve çizimde SoftwareSerial kütüphanesini kullanmanız gerekir.
Adım 6 Çevre ve bellenimin hazırlanması.
Bir çizim yazmanın ve düzenlemenin en iyi yolu Arduino IDE'yi kullanmaktır. Arduino IDE sürümü 1.8'den düşük olmamalıdır. Arduino IDE'yi resmi web sitesinden indirin:
https://www.arduino.cc/en/Main/Software
Ardından kütüphaneyi Arduino IDE'ye eklemeniz gerekir. Çizim bir SoftwareSerial.h kütüphanesi kullanıyor (Bluetooth modülü ile iletişim için):
İndirmeniz ve yüklemeniz gerekecek. Arduino IDE'nin yüklü olduğu klasörde bulunan arşivi açıp, açılmamış dosyaları “kütüphaneler” klasörüne taşıyarak kütüphaneyi kurabilirsiniz. Veya kitaplık eklemek için yerleşik aracı kullanabilirsiniz - indirilen arşivi açmadan Arduino IDE'deki Sketch - Connect Library menüsünü seçin. Açılır listenin en üstünde ".Zip Kütüphanesi Ekle" öğesini seçin. Ve indirilen arşivin konumunu belirtin. Kütüphaneyi kurduktan sonra, Arduino IDE'yi yeniden başlatmanız gerekir.
Uzaktan kumandanız, bir konektör aracılığıyla USB-TTL ile bağlanan uzaktan kumandanın önceki sürümüyle aynı şekilde yanıp sönüyor, şarj da bunun üzerinden. Çizimi doldururken Sıfırla'yı tıklayın.
