
Ali'de oğlum için güzel bir oyuncak aldım - radyo kontrolünde bir ekskavatör.
Bom sınırlayıcılarının yokluğunda ifade edilen ciddi bir kusur olduğu ortaya çıktı. yani oku maksimuma çıkarırsanız, çatlamaya başlar, aynı şey kulenin eksen etrafındaki dönüşü için de geçerlidir (670 derece). Sonuç olarak, şimdi küçük bir yükte bile genellikle bir çatlak var. Eksen çevresinde genellikle büyük zorluklarla bir yönde döner. Bu cihazı söktüm ve fikir yükseltmek için bana geldi.
1. Şasideki motorları, daha güçlü olanlarla değiştirin (şimdilik söz konusu olsa da). Ve hız için bir ayar yapın. Şimdi hız bir, sabit - ileri veya geri.
2. Maksimum bom kaldırma ve durma noktasına ulaşacak bom hareket sınırlayıcılarını ayarlayın, sonra sadece ters yönde.
3. Bomdaki motorları step motorlar veya servolar ile değiştirin. Burada insanları anlama yardımına gerçekten ihtiyaç var. Hangisi bu rol için daha iyi? Ve hiç uygun mu? Ekskavatörün gevşemiş kum yüklemesinden biraz daha karmaşık hissetmekle görevlerle baş etmesini istiyorum, ancak bu onun için zor - dişliler çatlıyor ...
4. pil yüklemek için daha güçlü ve daha büyük. Durumda, karşı ağırlık için çelik çubuklar var. Sadece alanı doldurabilirsiniz. Deneyler için çok fazla alan var :)
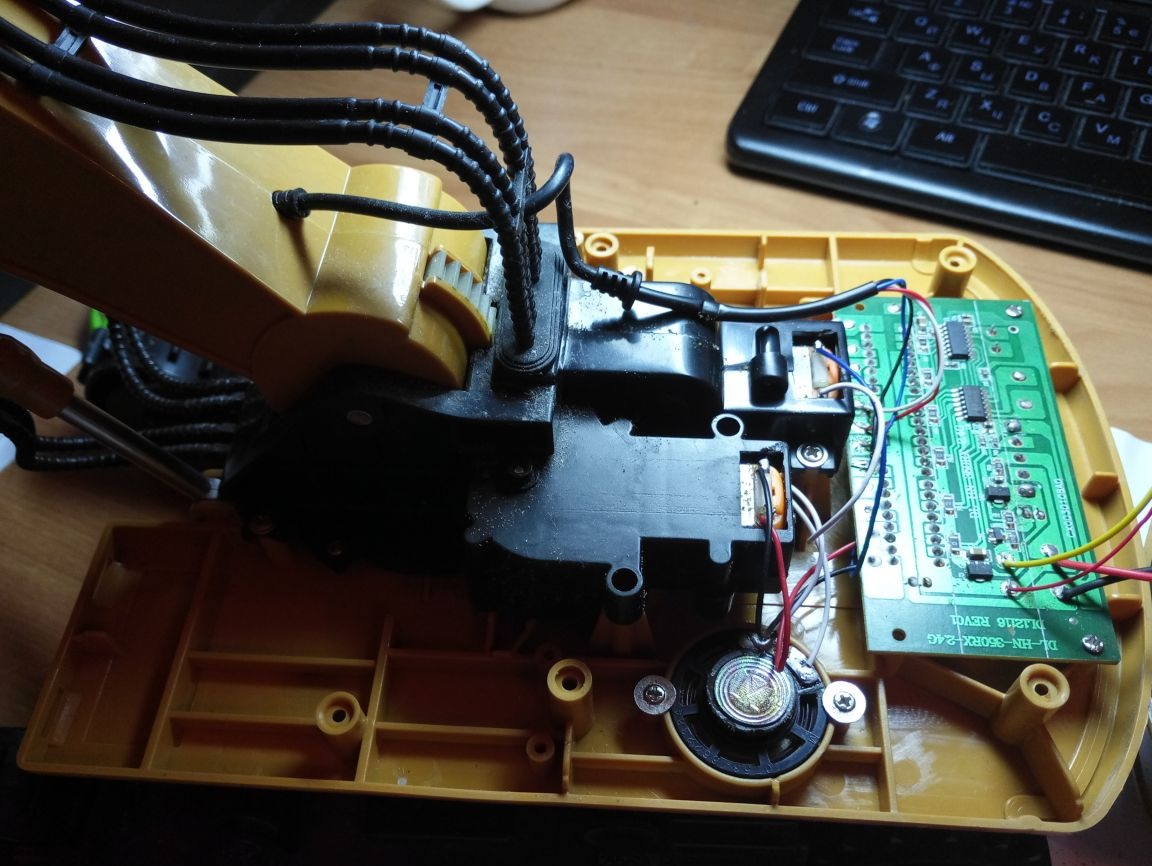
5. Buna göre, ekskavatörün içindeki kartı bir arduino ile değiştirmek ve cihazı kontrol etmek için bir WiFi modülü eklemek istiyorum. Uzaktan kumandanın başka bir tane daha yapması gerekecek. İşte soru şu. Hangi arduinka alacak? hangisi başa çıkacak? Nano, değil mi? Gerekli olacak 6 motoru arduino'ya bağlamak (şasi - 2, kuleye ve 3'ü boma). Voltaj dengeleyiciye ihtiyaç var mı?
Genel olarak, bu fikrin uygulanması için ne önerebilirsiniz? Görevin uygulanabilir olmadığına inanıyorsanız, lütfen hangi sebepten dolayı açıklayınız. Oğlumla, yeni şeyler öğrenmeye alışkın ve öğrenmeye alışkın olmasa da, gerçekten yapmak istiyorum ... :)
Fotochki.
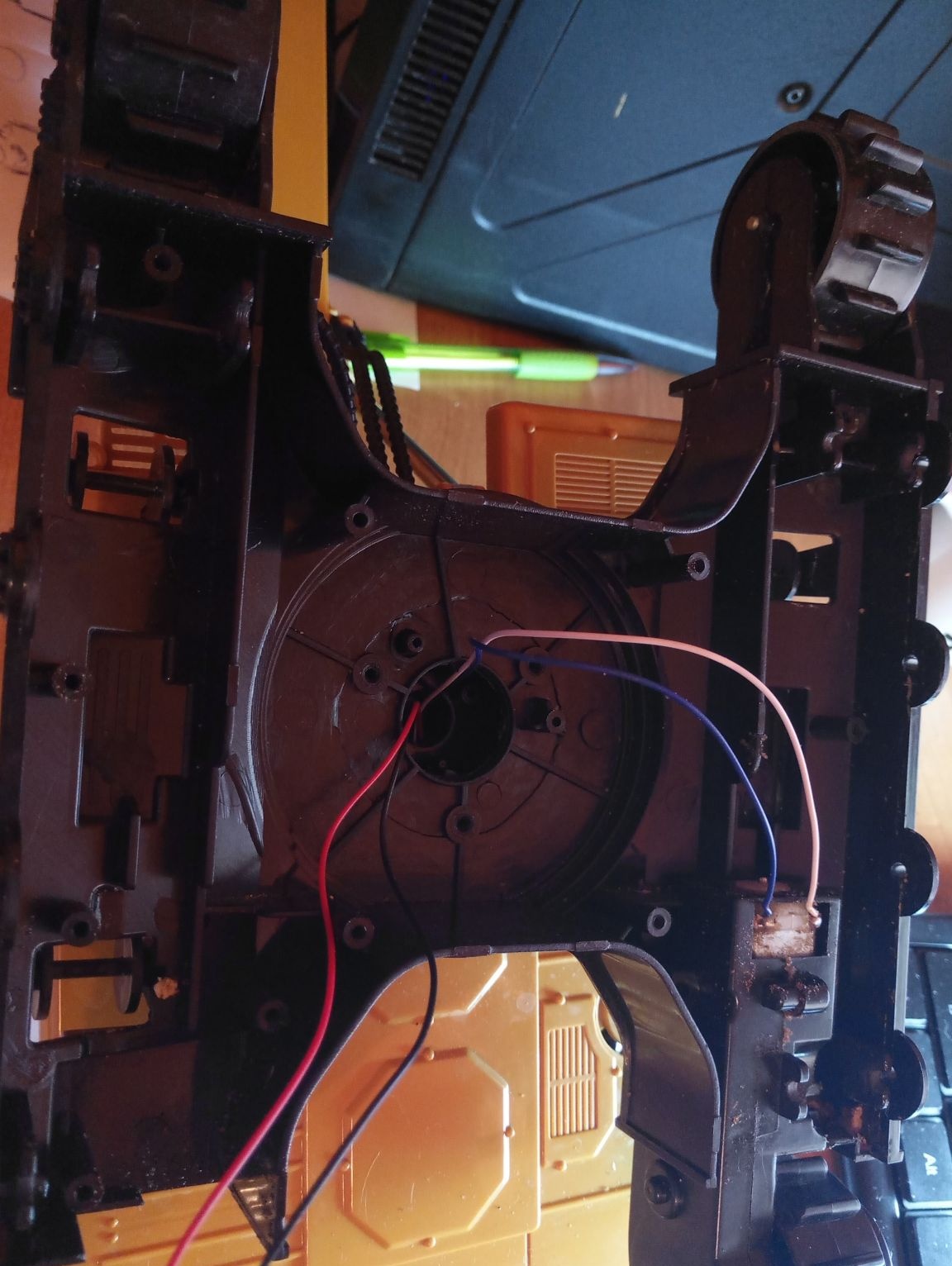
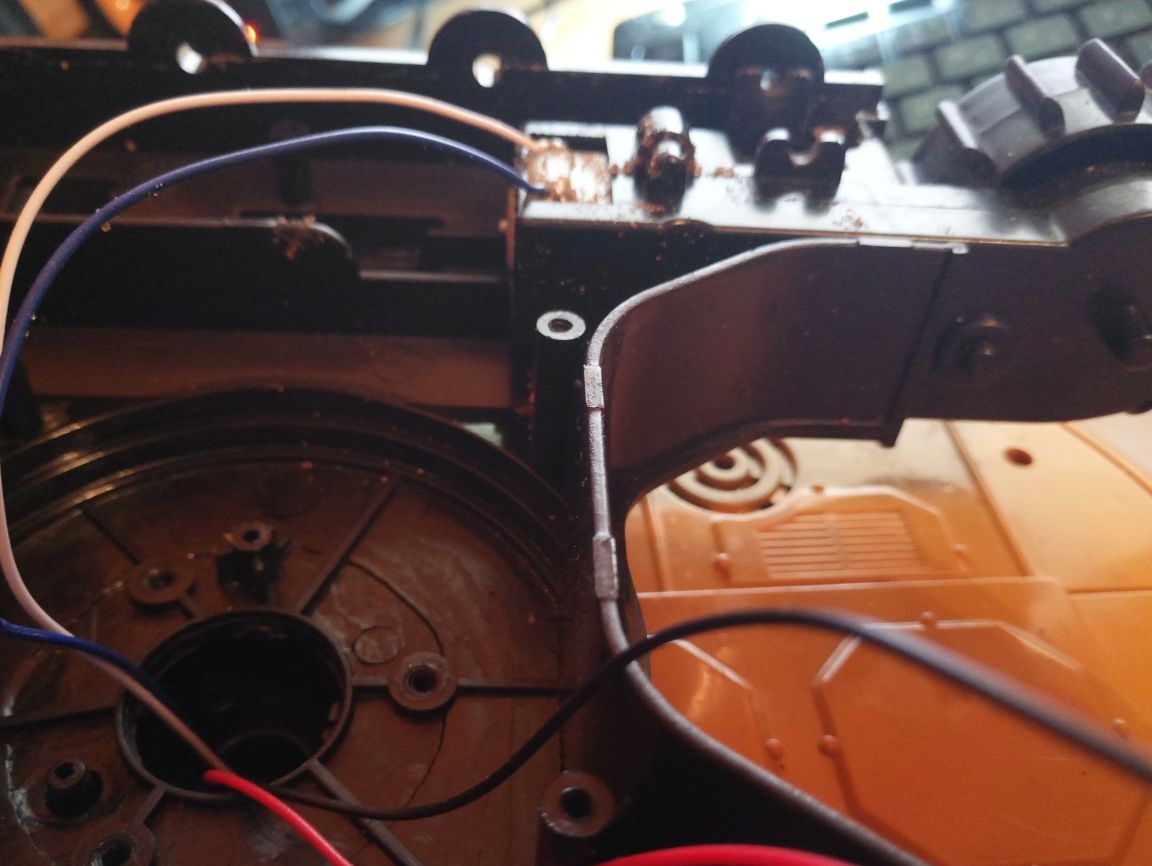
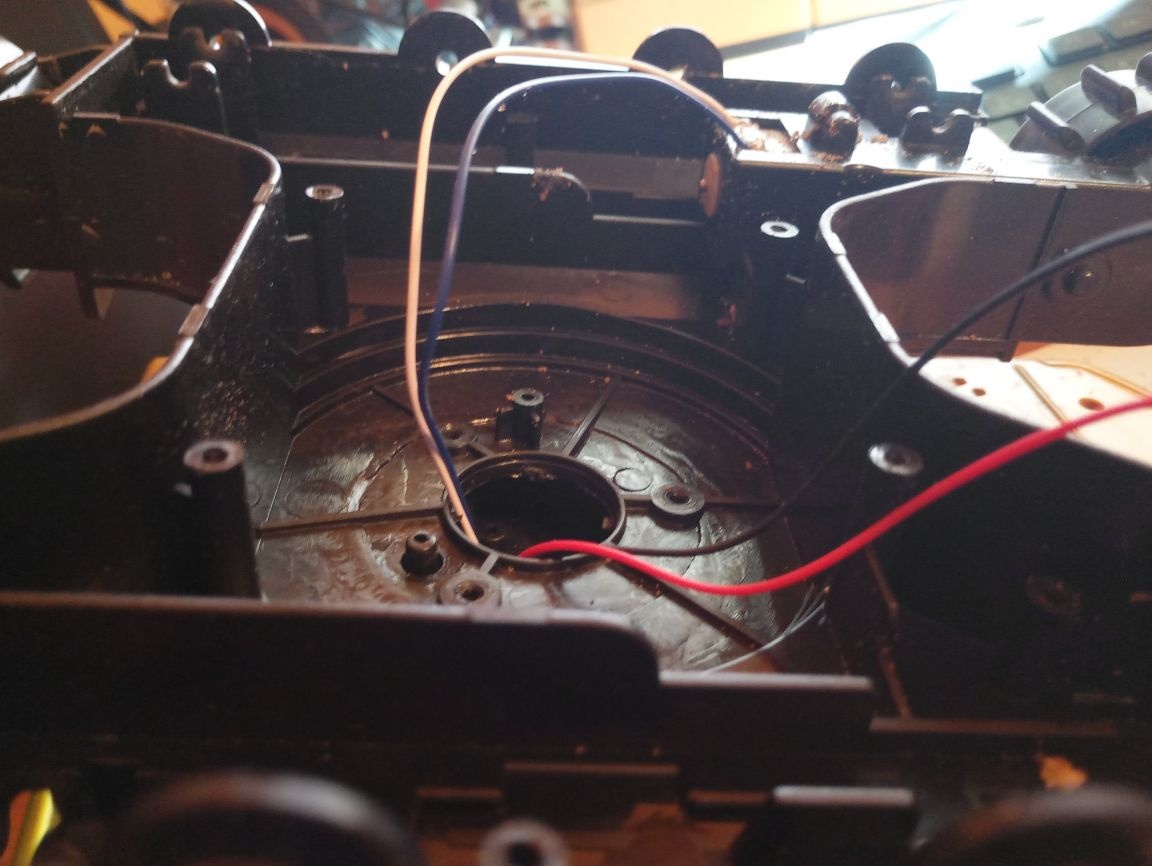
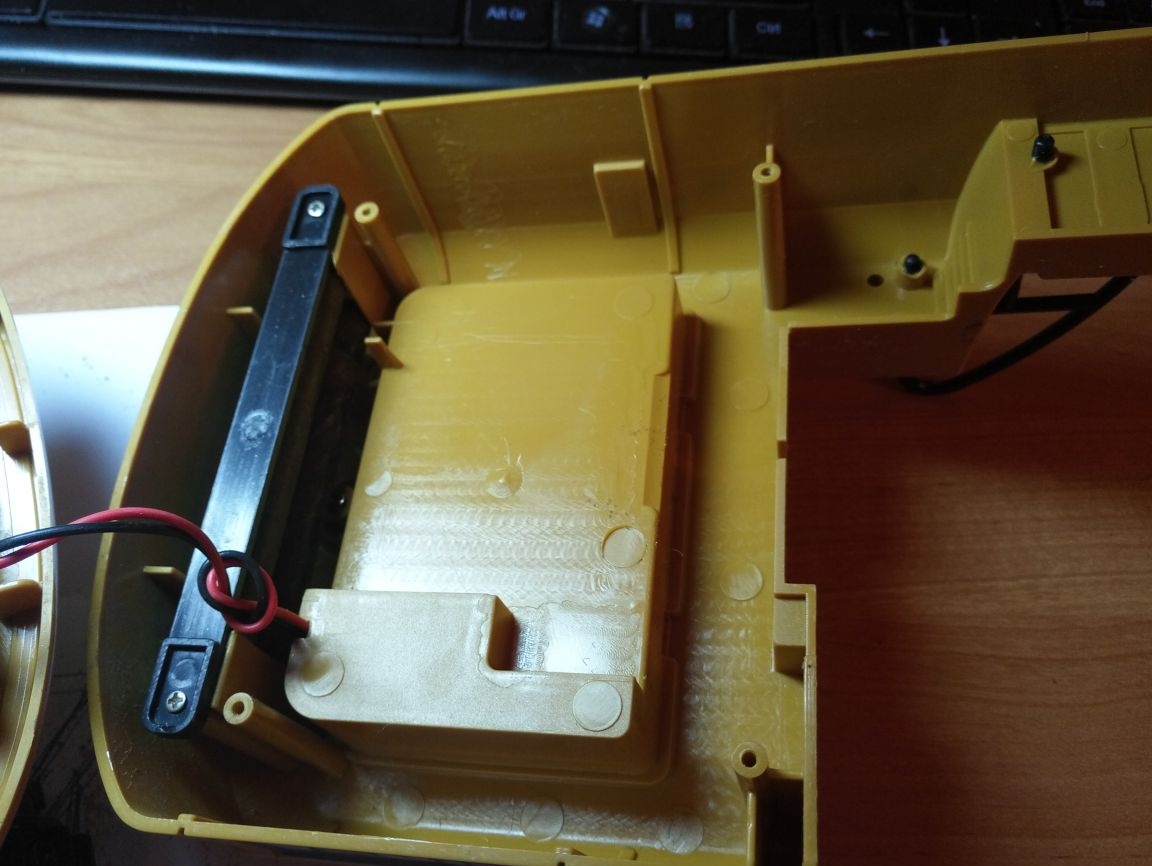
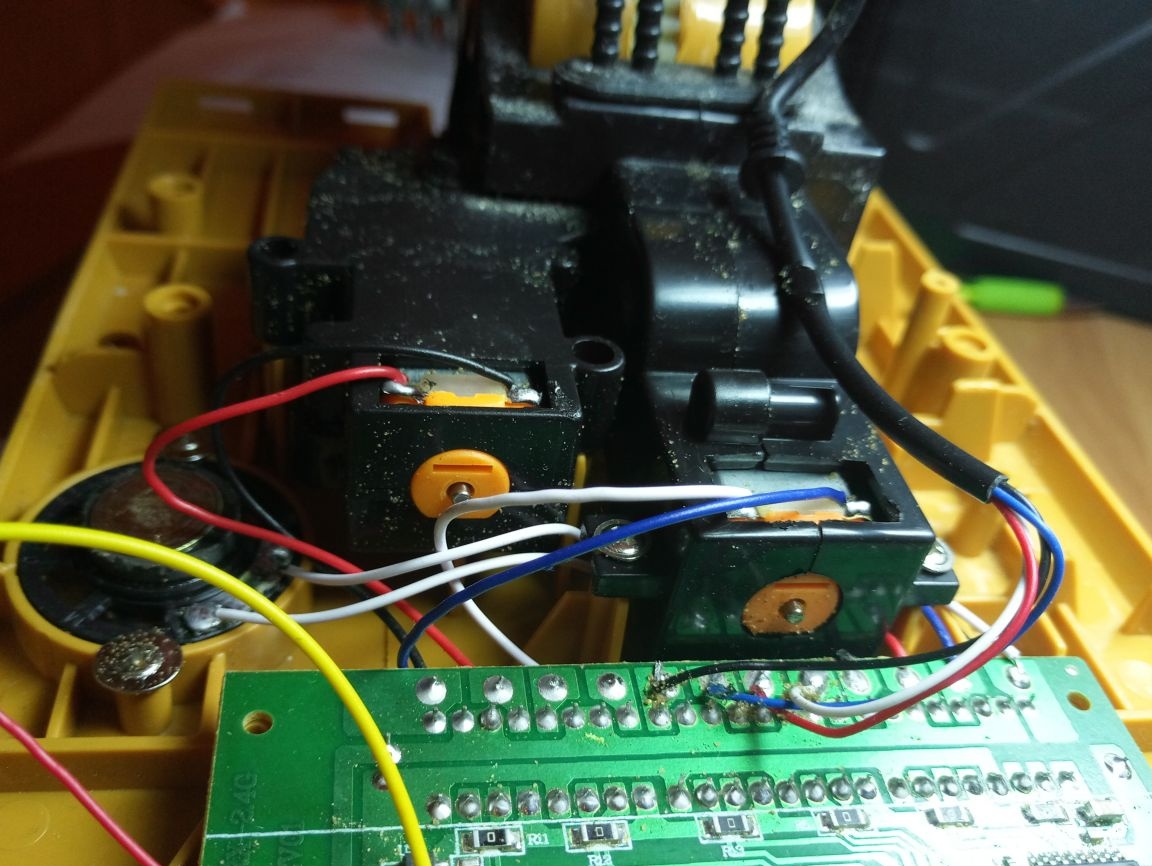
mekanizmaların kendileri sadece şaside sökülüp oklara tırmanmadı