Bugün bir sonrakini paylaşmak istiyorum homebrewleri dal. Lego dayanmaktadır ve Arduino. Kontrol için 433 MHz vericili bir uzaktan kumanda kullanacağız. Bu sefer bir yarış yapmak istedim bir araba. Başlayalım:
- Lego Teknik 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz radyo iletişim modülü
- Motor redüktörü 200 rpm, şaft çapı 3 mm
- 2 LED
- 2 direnç 150 ohm
- Kondansatör 10v 1000uF
- 2 tek sıralı tarak PLS-40
- 2 PBS-20 konektör
- İndüktör 68mkGn
- 6 NI-Mn 1.2v 1000mA pil
- Bağlayıcı baba-anne iki pimli tel
- Homutik
- Farklı renkteki teller
- lehim
- Rosin
- havya
- 3x40 cıvatalar ve somunlar ve pullar
- Cıvatalar 3x20
Adım 1 kasayı monte edin.
Makinemizi, bazı ayrıntılandırmalarla ikinci seçenek olan 42022 Lego talimatlarına göre monte etmek gerekir. Sayfa 3-6 arasındaki tüm eylemleri gerçekleştiririz. Bir dişli mekanizmasına ihtiyacımız yok. Lego motorunun da monte edilmesi gerekmez. Ancak, dişliler ve miller hariç, sayfa 14-19'da toplanan motor bağlantılarına ihtiyacınız olacaktır. Sonra, sayfa 25'teki kol hariç, sayfa 20'den 74'e kadar her şeyi toplarız.
Adım 2 vücudu mekanize edin.
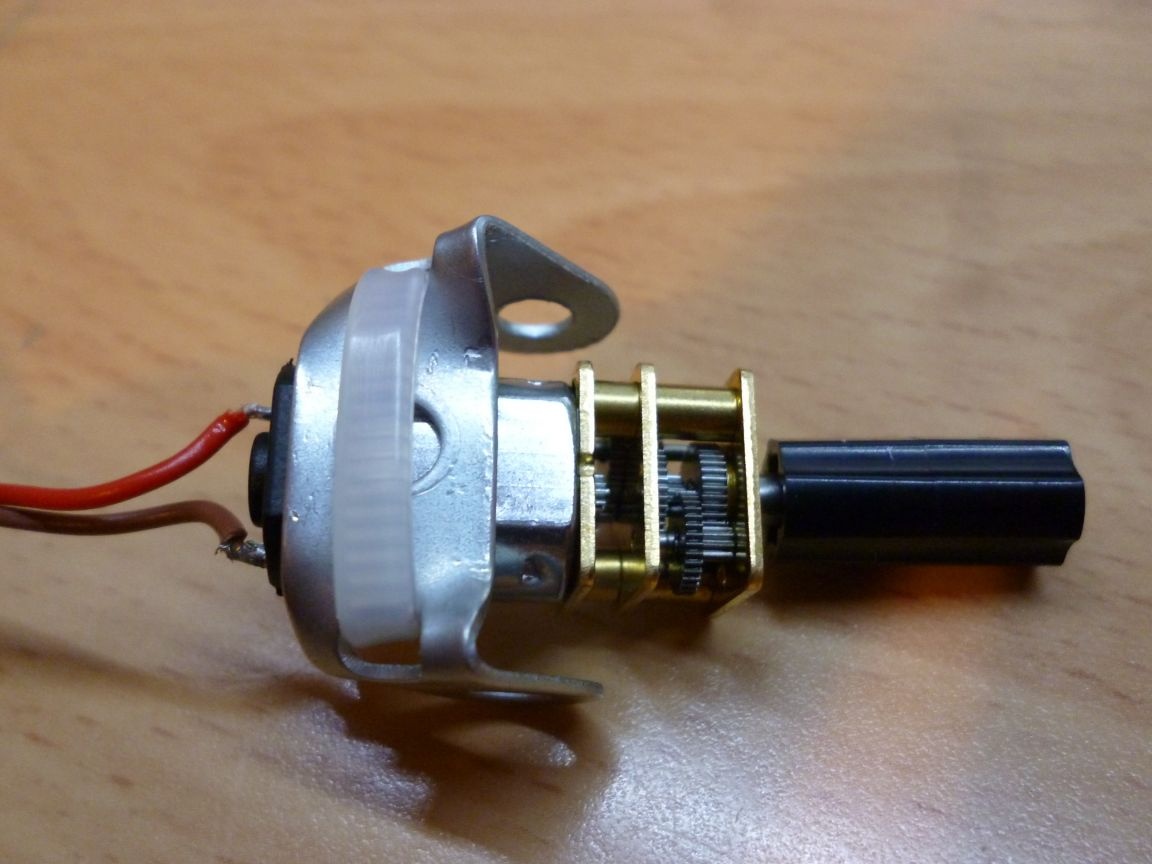
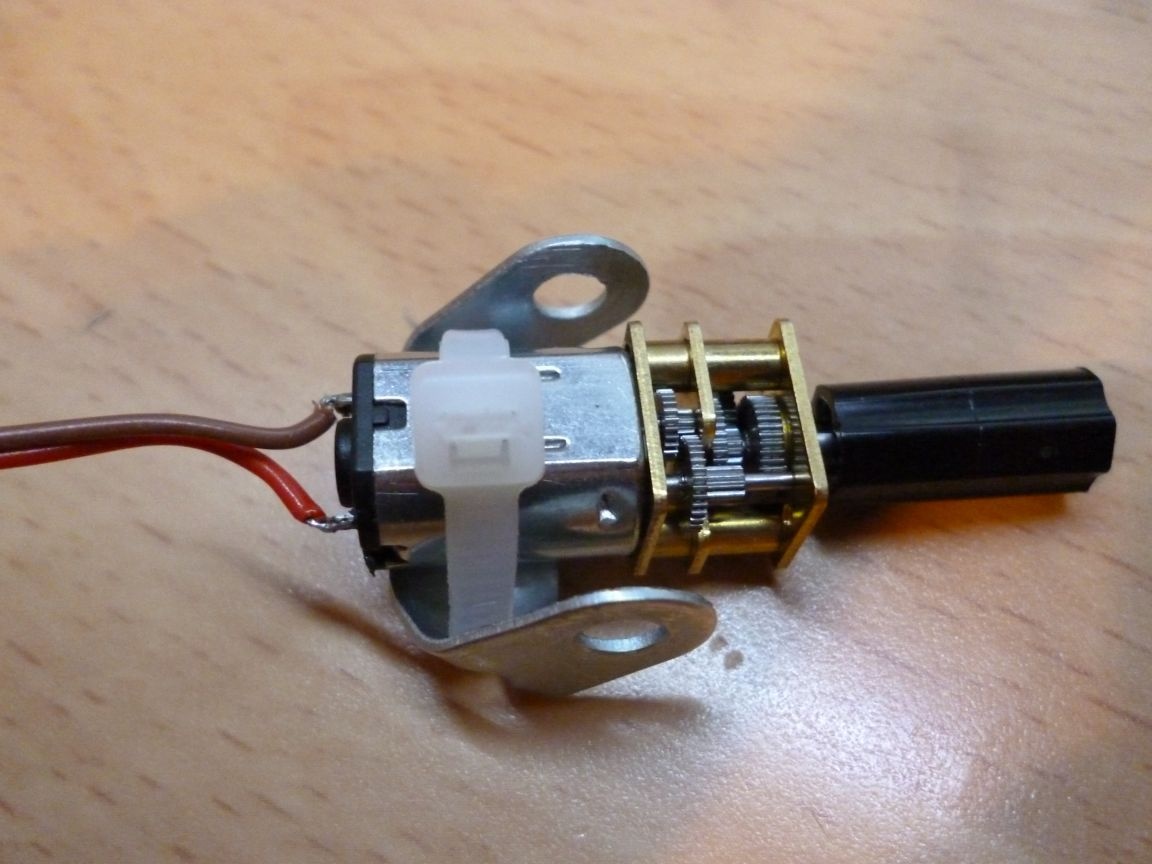
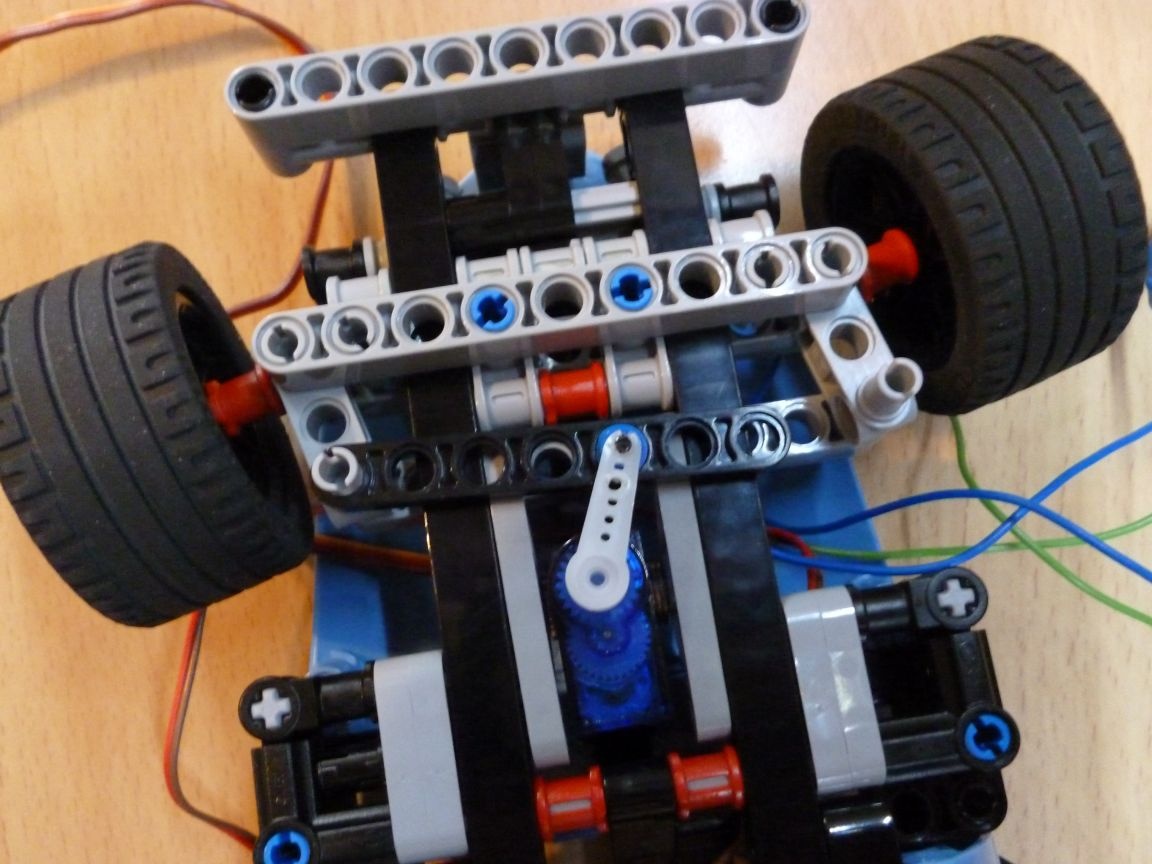
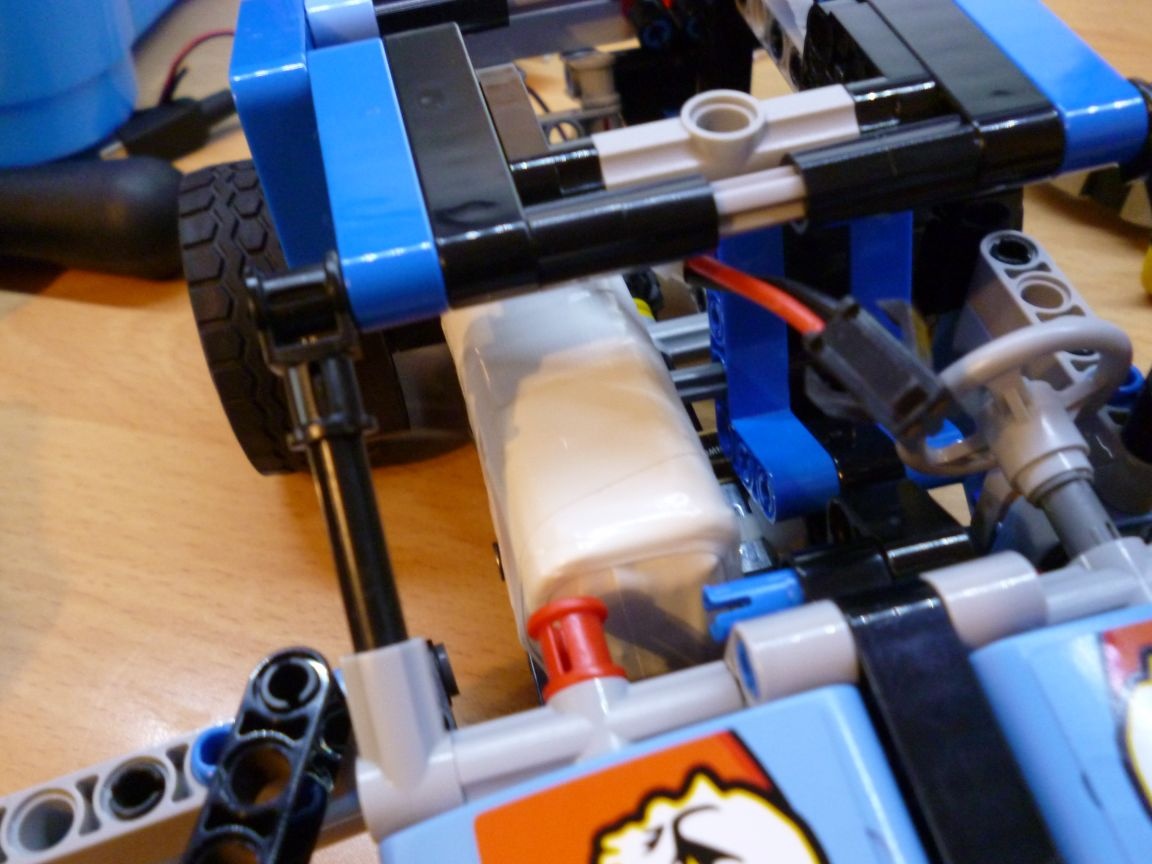
Harekete geçirin model 200 rpm hıza sahip bir dişli motoru olacak. Farklı bir dişli oranı ile kullanılabilir. Ancak, bence, bu en iyi seçenektir. 100 rpm'de - çok yavaş, 300 rpm - yeterli güç yok ve motor çok sıcak. Redüktörlü motorun şaftında, “Legovskaya” bağlantı manşonunu takın ve kibriti bükmekten koruyun. Motorumuzu modele sabitlemek için, parçayı metal yapıcıdan “P” harfiyle bükmek ve dişli motorunu bir kelepçe ile plakaya sabitlemek gerekir. Sonuç aşağıdaki gibi olmalıdır:
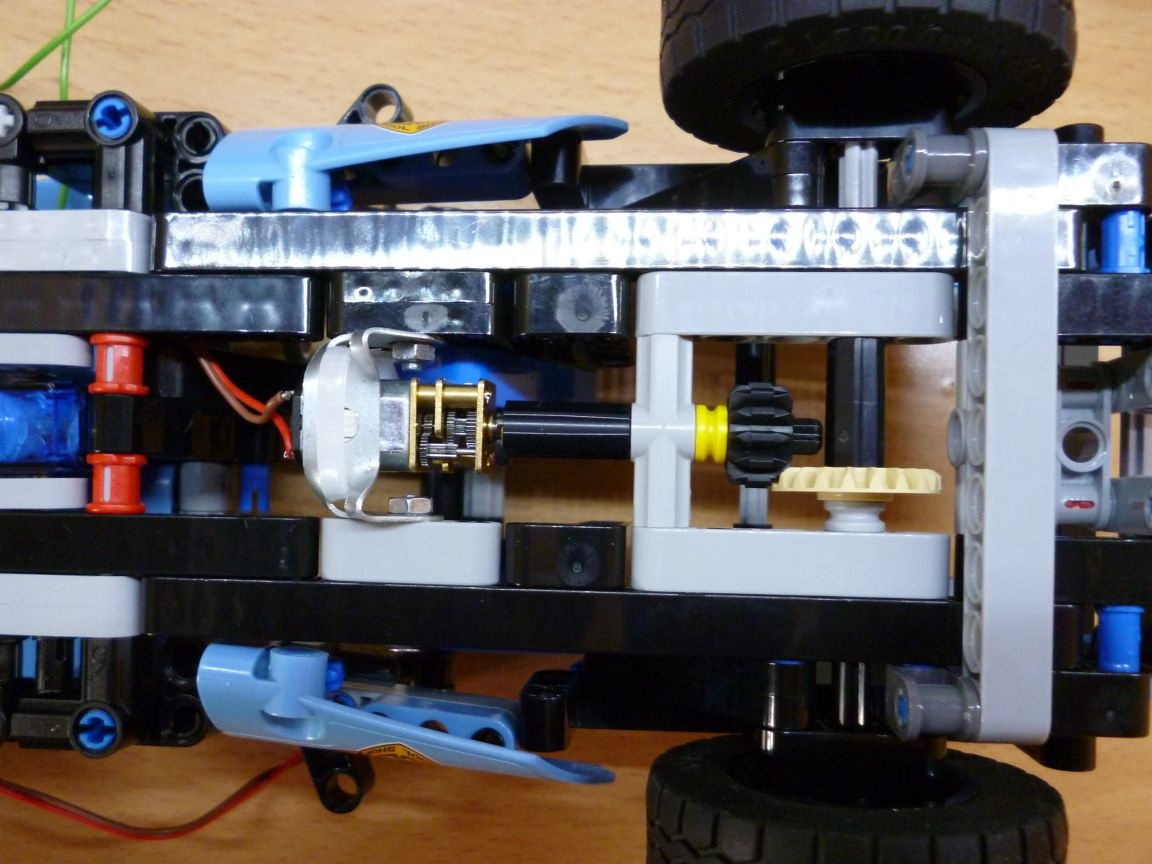
3x20 cıvata yardımıyla motorumuzu modele bağlarız. Çok fazla sıkmayın! Aksi takdirde, Lego yapıcı parçalarına zarar verebilirsiniz. Modelde şöyle görünüyor:
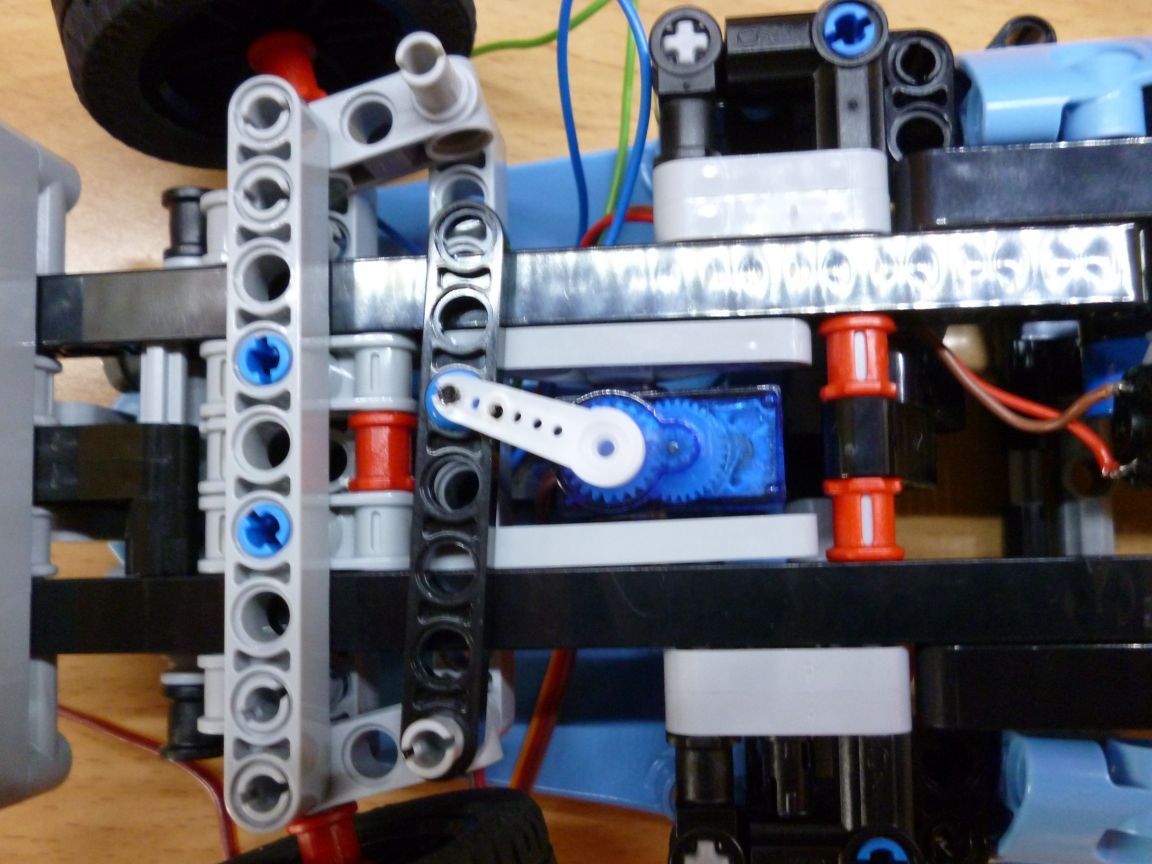
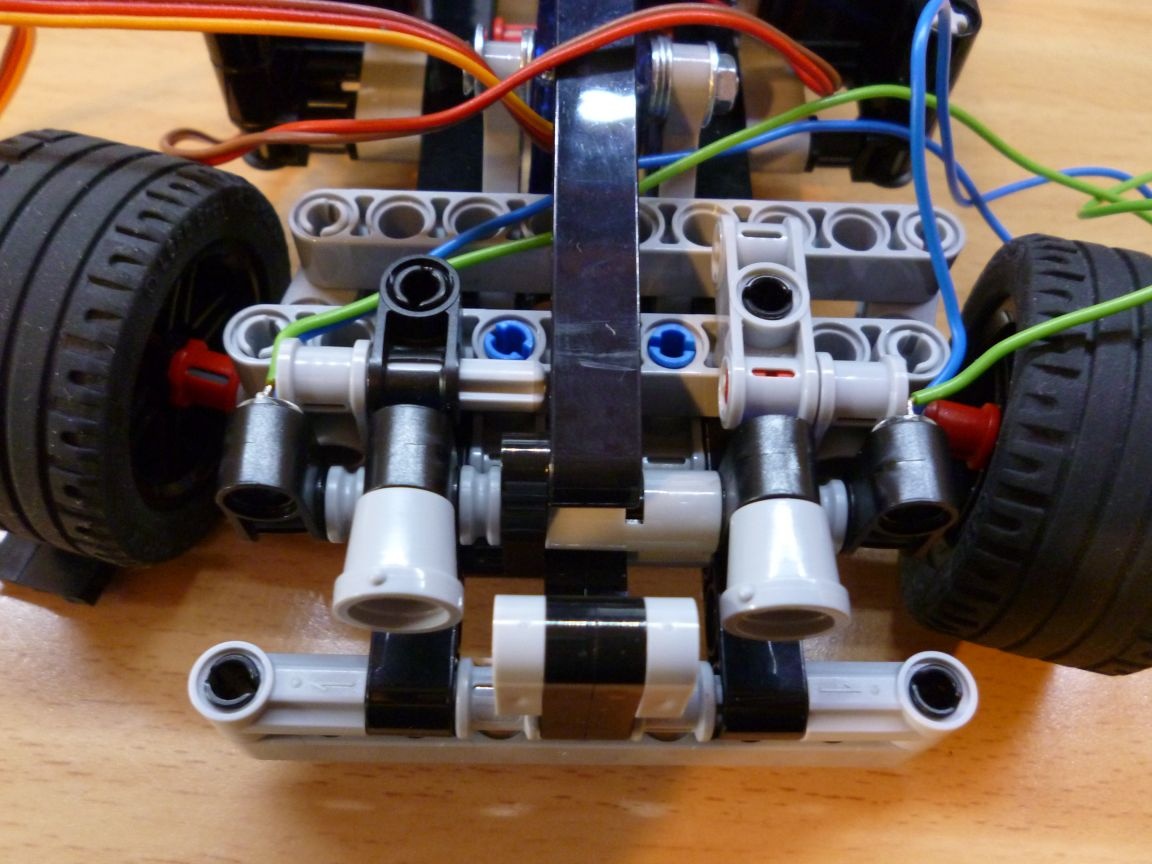
Dönüş yapmak için biraz değiştirilmiş bir servo SG-90 alın. Kasa, iç parçalara, 3,2 mm çapında açık deliğe dokunmayacak veya sadece bir kırtasiye bıçağı ile kesilmeyecek şekilde dikkatlice delinmelidir.

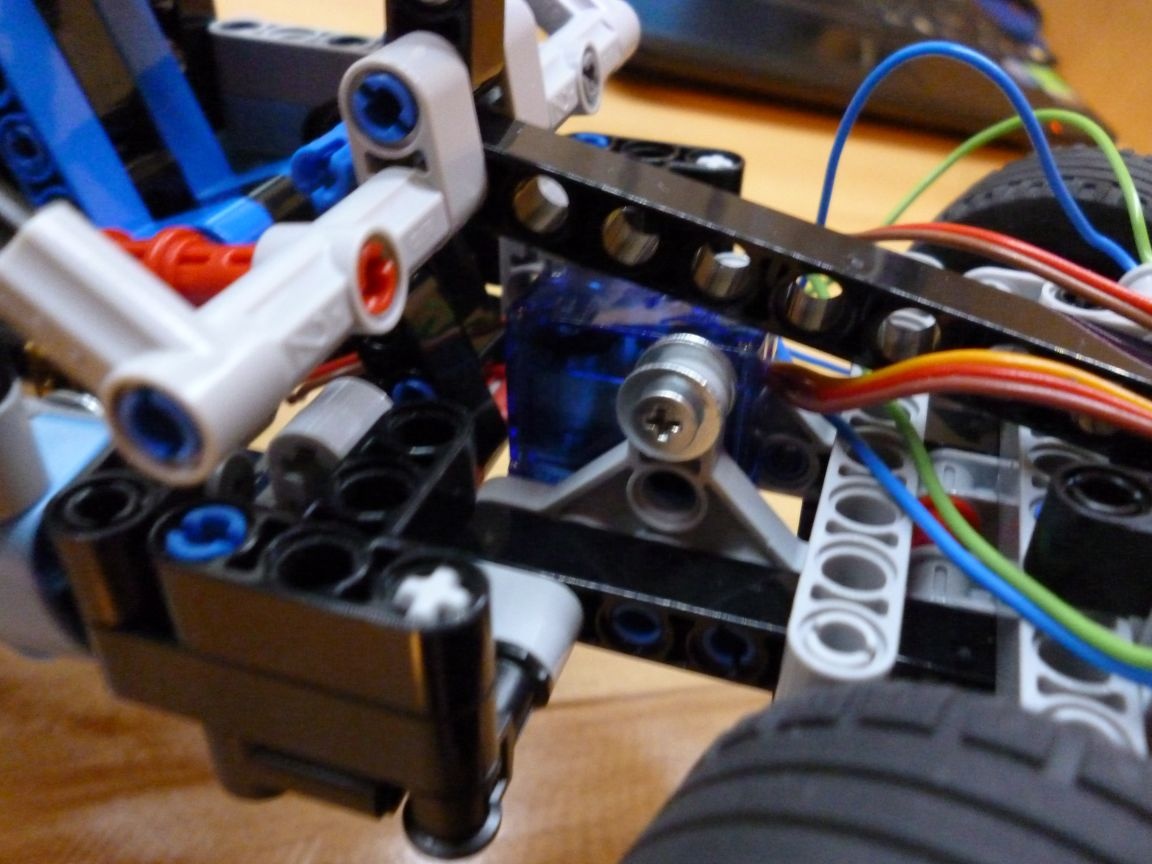
Yapılan deliğe bir cıvata takıyoruz ve kenarlara üçgen plakalar yerleştirip somunlarla sabitliyoruz. Kolu servo şaftın üzerine koyduk ve parçayı Lego koluna sabitledik. Bir daktiloda şöyle görünür:
Adım 3 bir elektrikçidir.
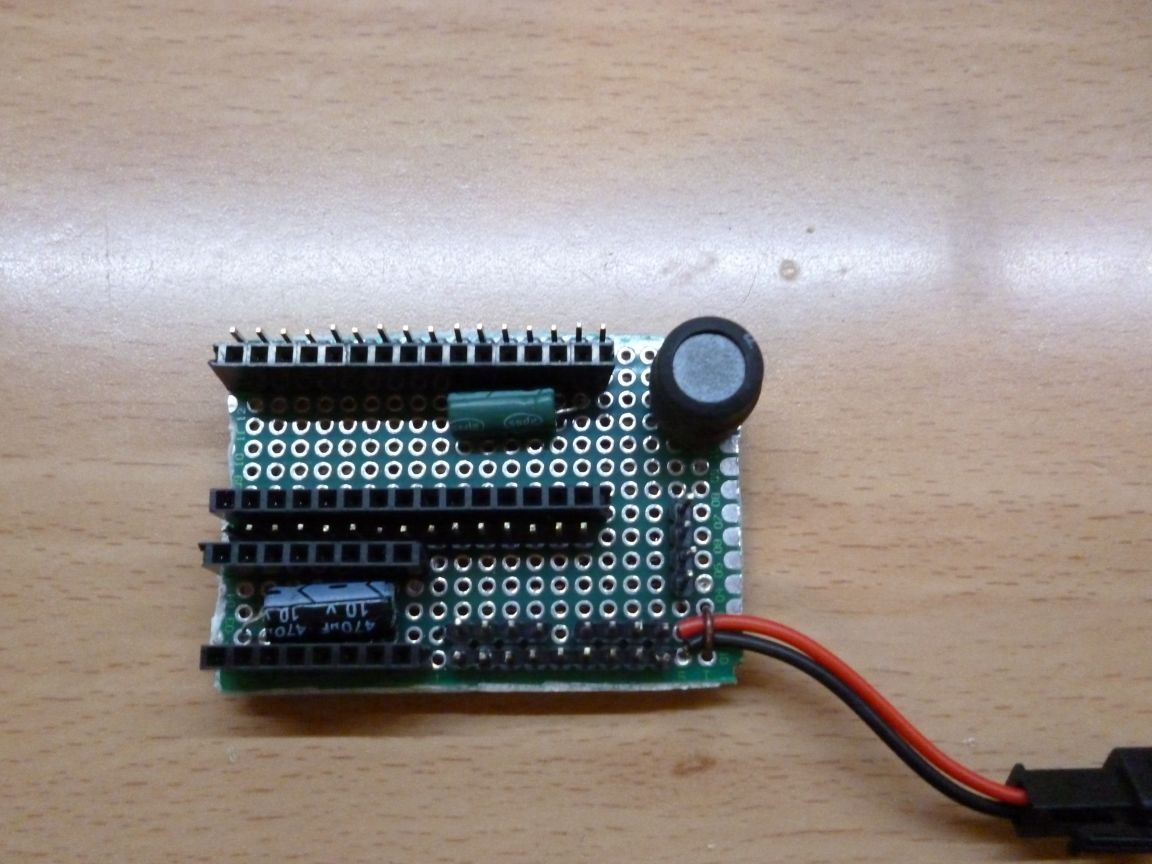
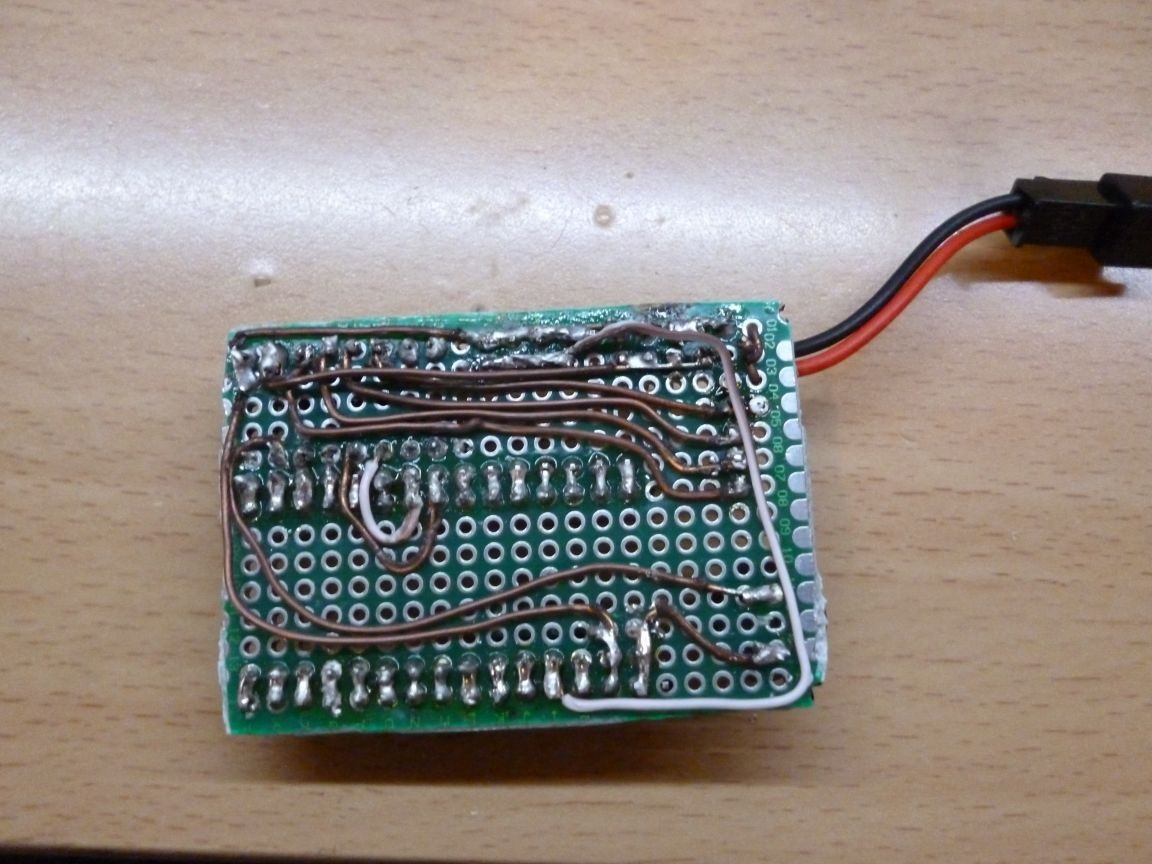
Havya elinde ve git. Tüm elektrik, montaj kablolarını bağlayarak kolayca monte edilebilir. Ancak bu, çok fazla alan gerektirdiği için elverişsizdir. Ek olarak, düşük kaliteli temas olasılığı yüksektir. Bu nedenle, devre kartındaki her şeyi aşağıdaki şemaya göre lehimlemek daha iyidir:
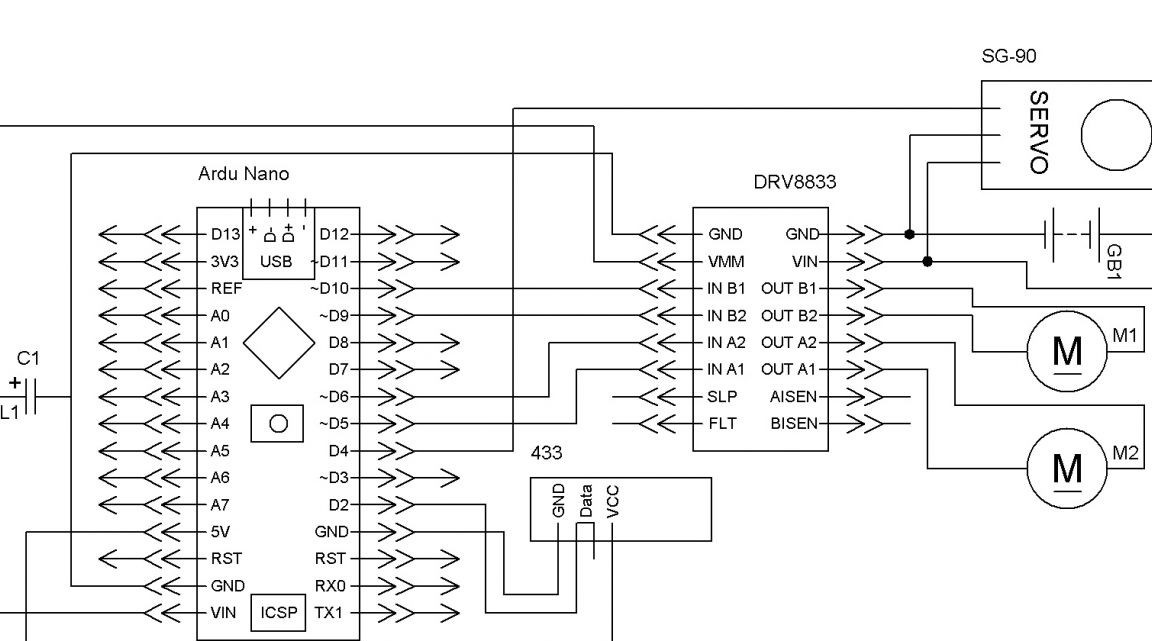
Biraz netlik getireceğim: herhangi bir düşük güç kapasitörü alabilir, herhangi bir türden bir indüktör bulabilirsiniz, bu mikrodenetleyicinin voltajını stabilize etmek için gereklidir. Anten alıcıya lehimlenmelidir. Aşağıdaki var:
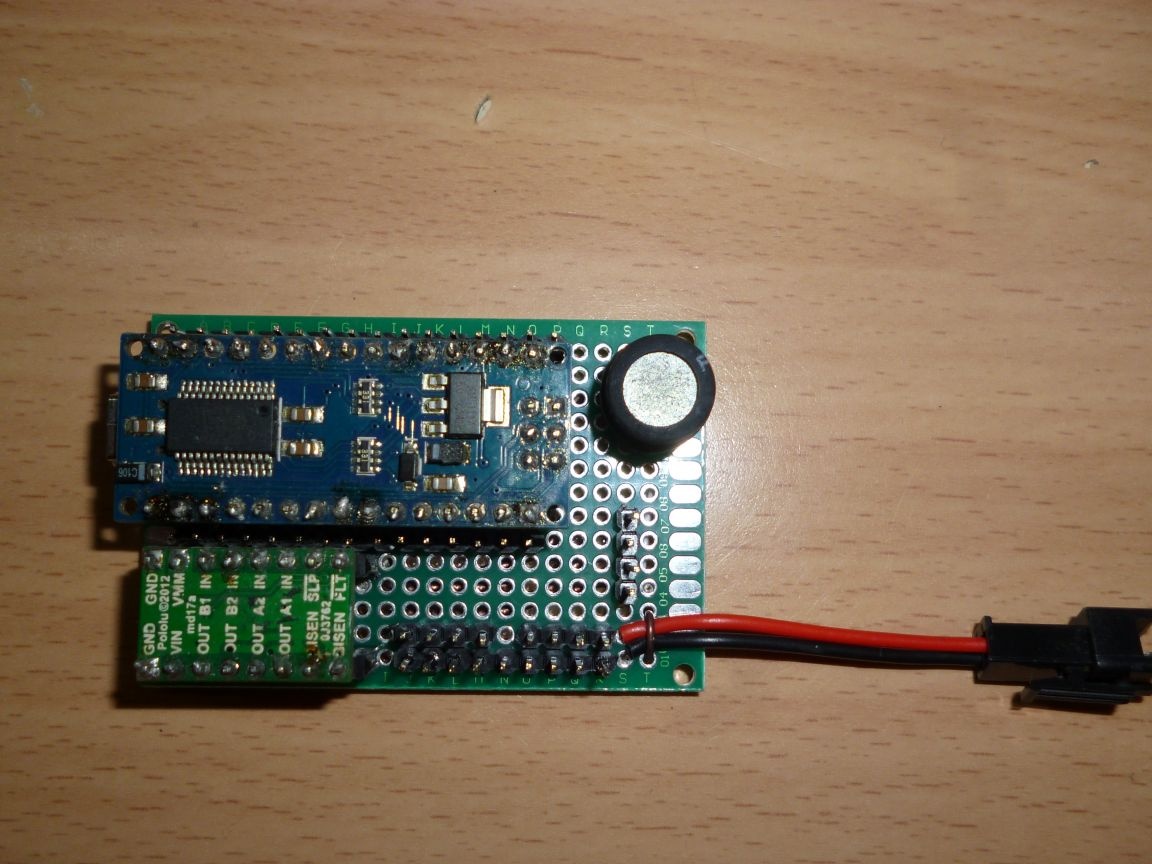
Arduino Nano ve DRV 8833'ü yerlerine koyduk:
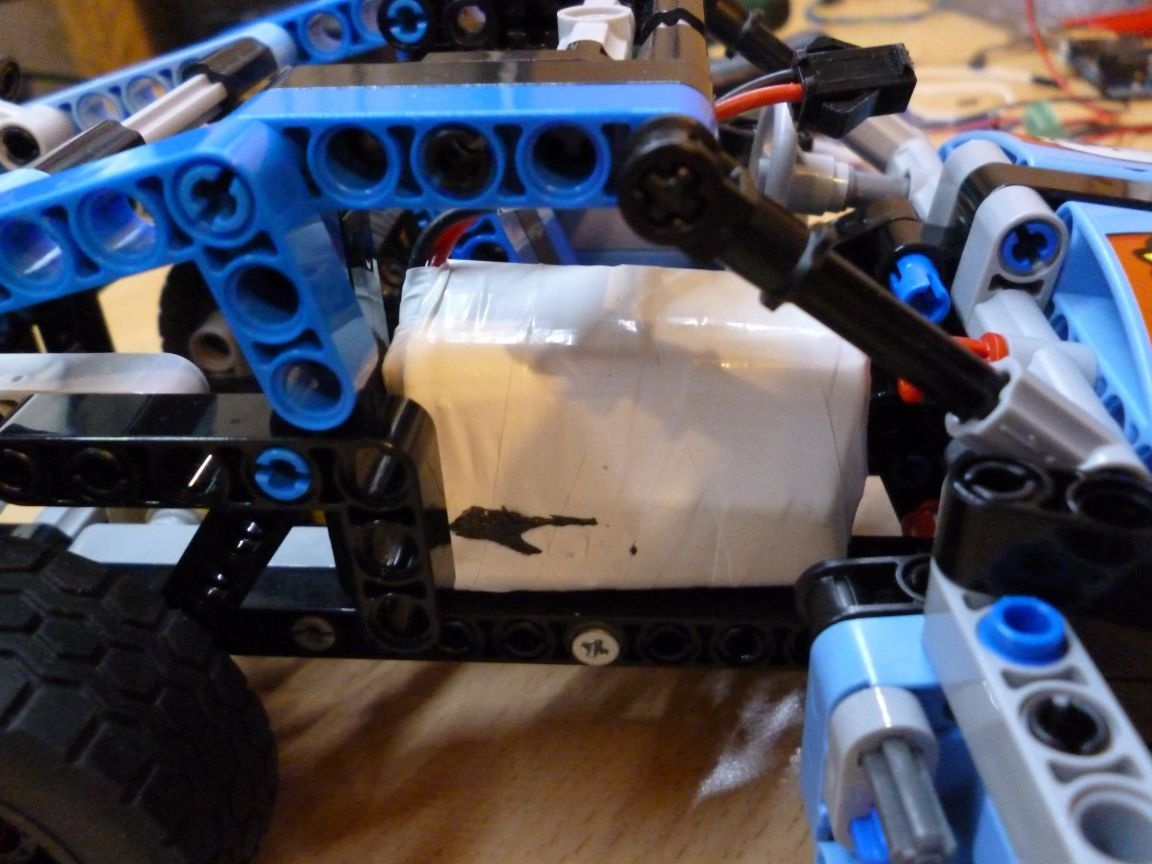
Güç için seri olarak lehimlenmiş ve elektrik bandı ile sarılmış 6 Ni-Mn 1.2v 1000mA pil kullanacağız. Onları çift taraflı yapışkan bant yolcu koltuğuna yapıştırın.

Her şeyi şemaya göre bağlarız ve makinenin arkasına monte ederiz. Ayrıca birkaç LED de ekleyebilirsiniz. Onları farlara yerleştirin ve pime 14 (A2) bağlayın.
Adım 4 bellenim.
Ürün yazılımını yazmak için Arduino IDE'yi kullandım. Yazma sırasındaki geçerli sürüm 1.8.1'dir. Rc-switch-2.52 kütüphanesini kullanarak 433 MHz modülünü kullanarak iletişim protokolünü uygulamak uygundur. İndirmeniz ve Arduino IDE'nin “kütüphaneler” klasörüne eklemeniz gerekir.
Arduino'yu bağlarız ve aşağıdaki ürün yazılımı ile yanıp söner:
Modelimizin performansını test etmek için ikinci bir Arduino kartına ihtiyacımız var. İkinci karta 433 MHz'lik bir radyo vericisi bağlamak gerekir. Verici aşağıdaki gibi bağlanır:
VCC (verici) ila 5+ (Arduino),
GND'den GND'ye,
VERİ - D10.
Değiştirilen SendDemo çizimini buraya yazın. Yüklediğimiz kütüphanedeki örneklerde yer alıyor ve komut göndermeye hizmet ediyor. Çizimi yanıp sönmeden önce, iletilen komutları hafifçe değiştirmeniz gerekir. Neyi kontrol etmeniz gerektiğine bağlı olarak, gönderme satırına aşağıdaki komutları yazın:
“1” - ileri hareket (tırnak işaretleri olmadan bir komut yazın!)
"2" - geriye doğru hareket
“15” - tam durak
"3" - direksiyon simidini sola çevirin
"4" - direksiyon simidini sağa çevirin
"5" - direksiyon simidini orta konuma getirin
"10" - farları açın
"11" - farları kapatın
433 MHz radyo vericisi ile uzaktan kumanda yapmak ayrı bir makalenin konusudur. Böyle bir uzaktan kumandanın üretimi için talimatları kesinlikle yazacağım.
Bu seçeneğin hemen hemen her Lego otomobil modeli için uygun olduğunu söylemek istiyorum. Tüm mekaniği bağlamak ve tahta için bir yer bulmak yeterlidir. Fantezi eklerseniz, herhangi bir modeli mekanize edebilirsiniz.