
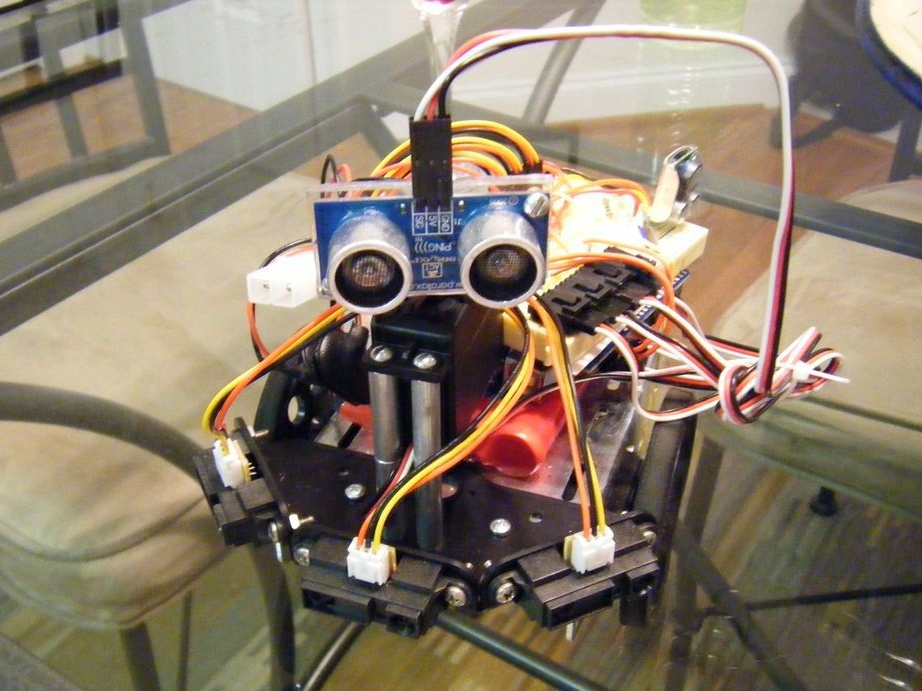
Bunun yazarı ev yapımı zaten bir kez engellerden kaçınarak özerk bir robot yapmaya çalıştı ve şimdi geliştirilmiş bir versiyonunu sunmaya karar verdi. Yazar robotu Bob olarak adlandırmaya karar verdi. Robotun önceki versiyonunda bir takım eksiklikler ve eksiklikler vardı. Bu modelde geliştirilmiş:
- Güç sistemi
- Ek sensörler takılı
- Daha iyi bağlantılar
- Daha hızlı kontrol cihazı kuruldu
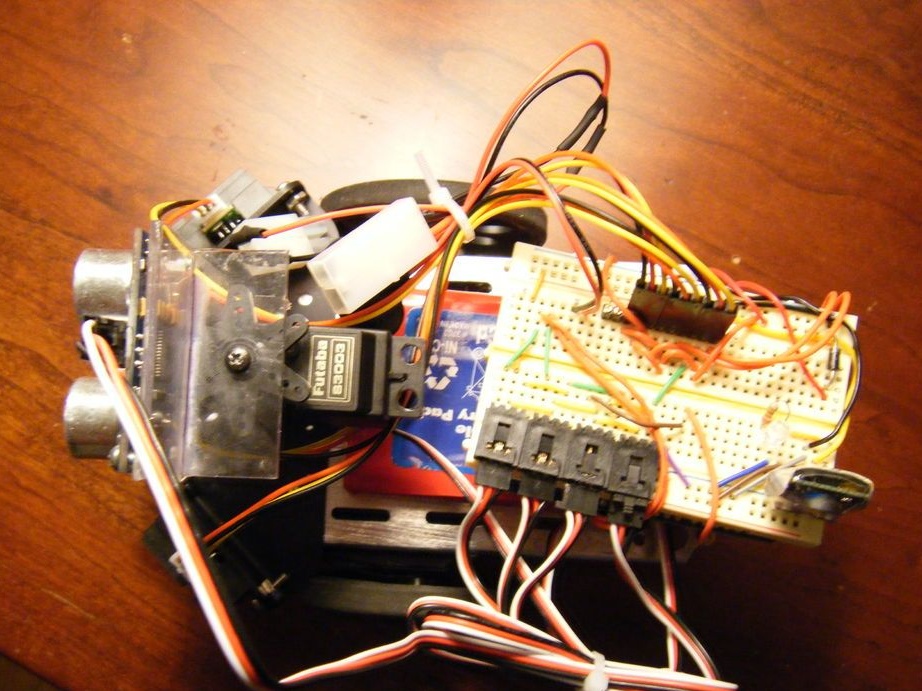
Bob 9.6V pil ve voltaj regülatörü kullanır. Robotun yaratıcısı başka bir GP2D12 IR sensörü ekledi ve diğer herkesin bağlantısını geliştirdi. Arazi taramasının iyileştirilmesi olasılığı için bir servo sürücüye bir ultrasonik telemetre yerleştirildi. ATmega168 mikrodenetleyici Arduino. Yazar, özellikle üzerinde bir robot tasarlamak için mikrodenetleyicili projeleri seviyor ve bunu yeteneklerini göstermenin en iyi yolu olarak görüyor.
malzemeler:
- Arduino
- Servo Futaba S3003 1 adet
- Servo sürücüler sürekli dönme Paralaks 2 adet
- Kablo bağları
- Farklı uzunluklardaki teller
- Akü konektörü
- Sensör için 3 pinli kablo
- breadboard
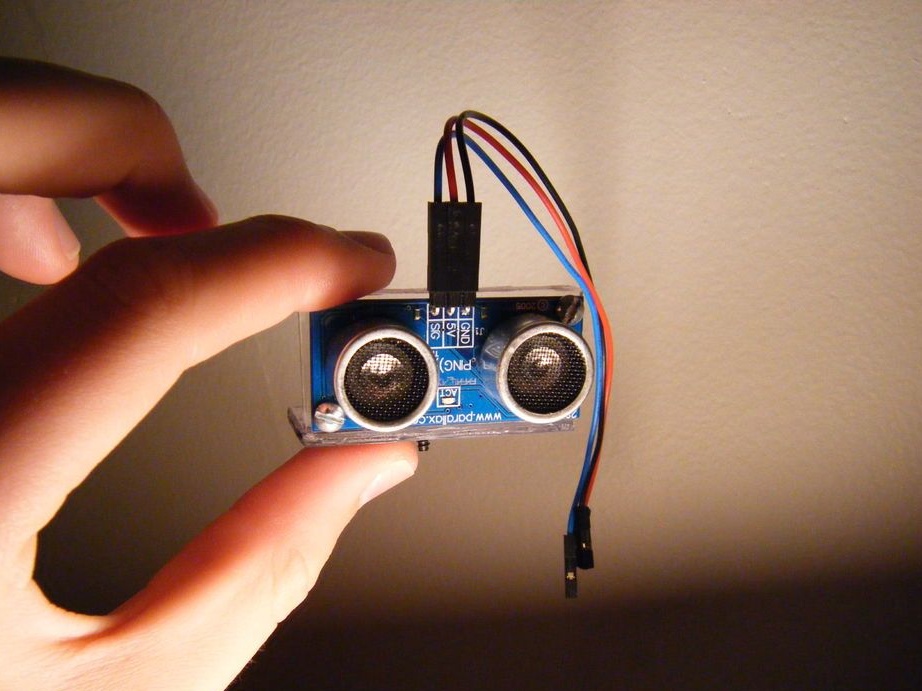
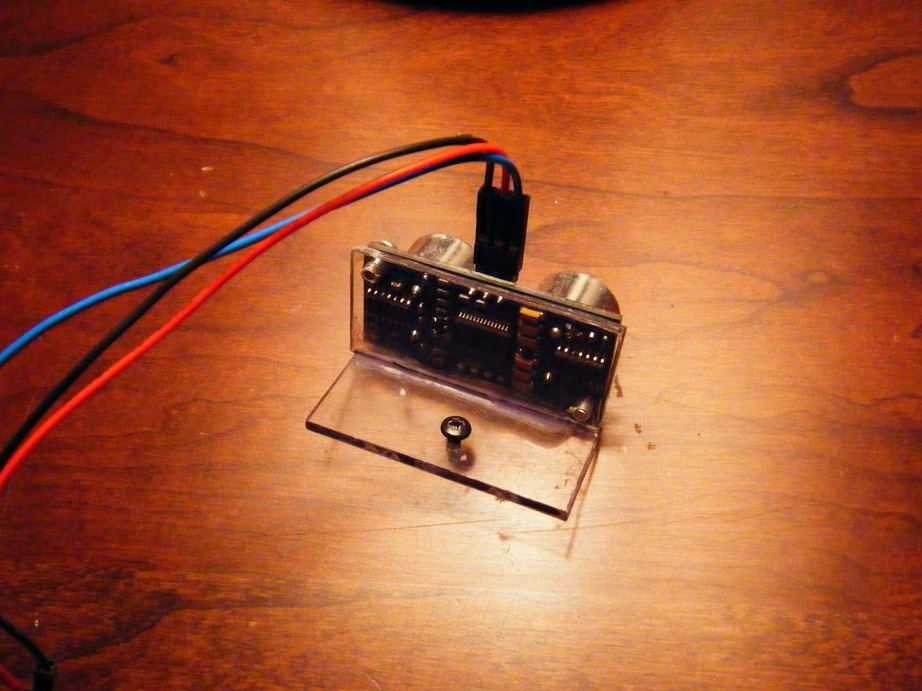
- Ultrasonik telemetre
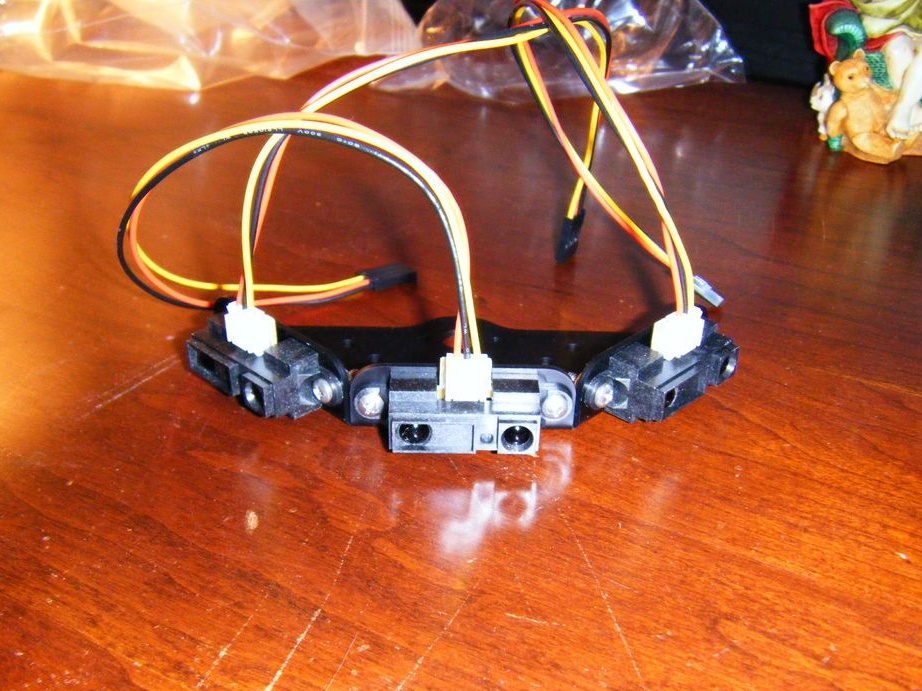
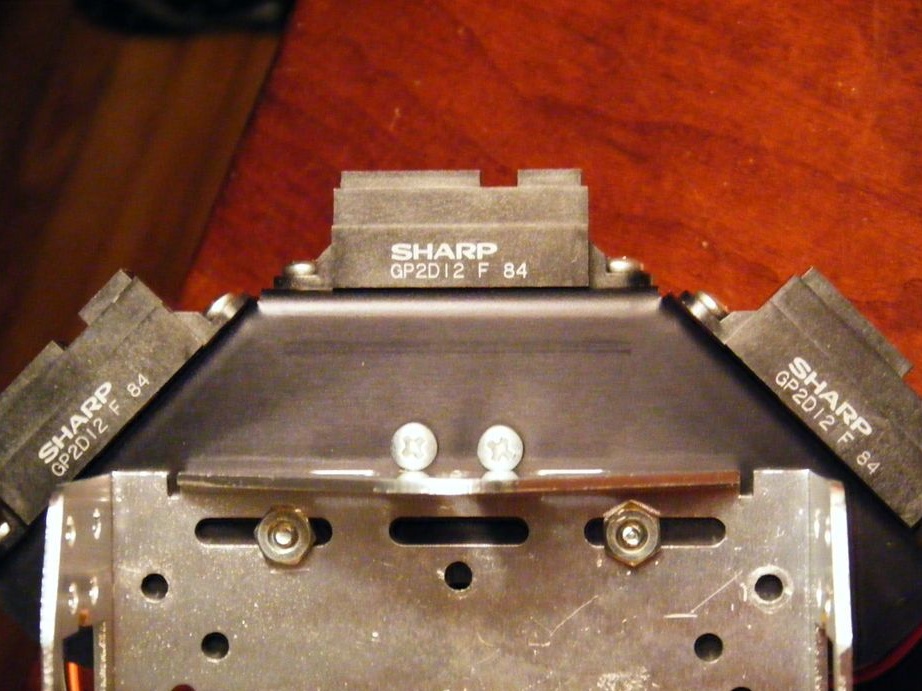
- Kızılötesi sensörler GP2D12 3 adet
- 9.6V Nikel Kadmiyum Pil
- Anahtarlama voltaj regülatörü 5V, 1A
- Şasi (yazar BOE-Bot Kitini kullanır). Şasi için plastik veya pleksiglas, hatta doğru şekle sahip bir tahta parçası bile kullanabilirsiniz.
- Piezo sesli uyarısı (işin başladığını belirtmek için)
- LED 1 adet
- 200 Ohm LED için direnç
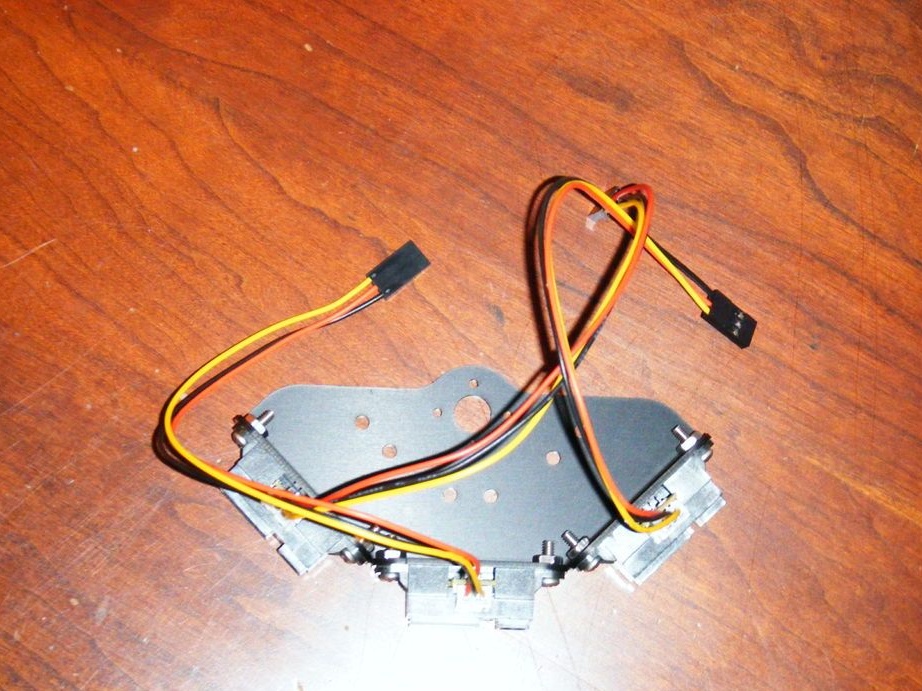



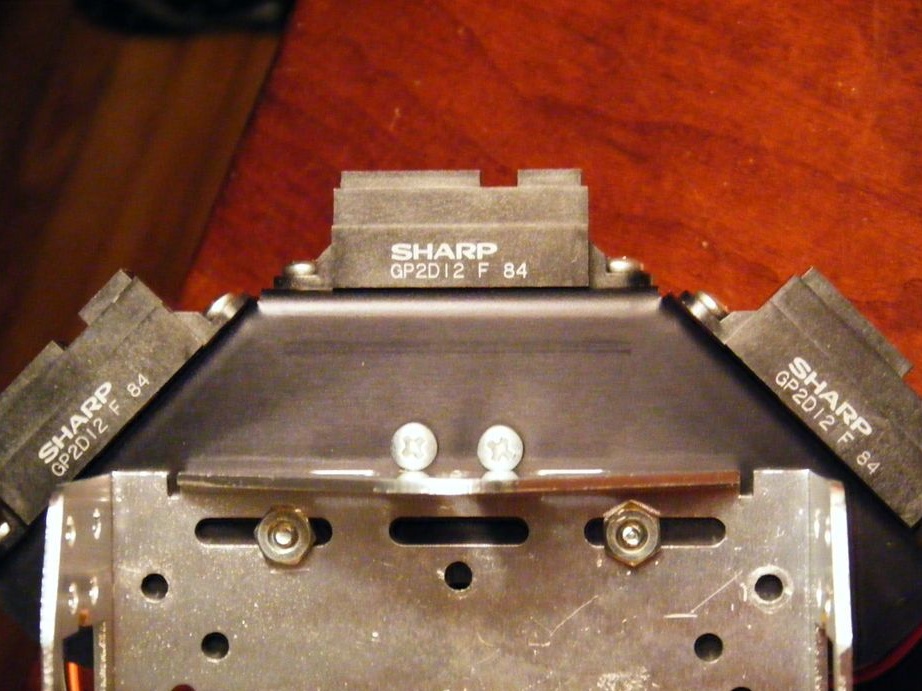
İlk adım. IR sensörlerini takma.
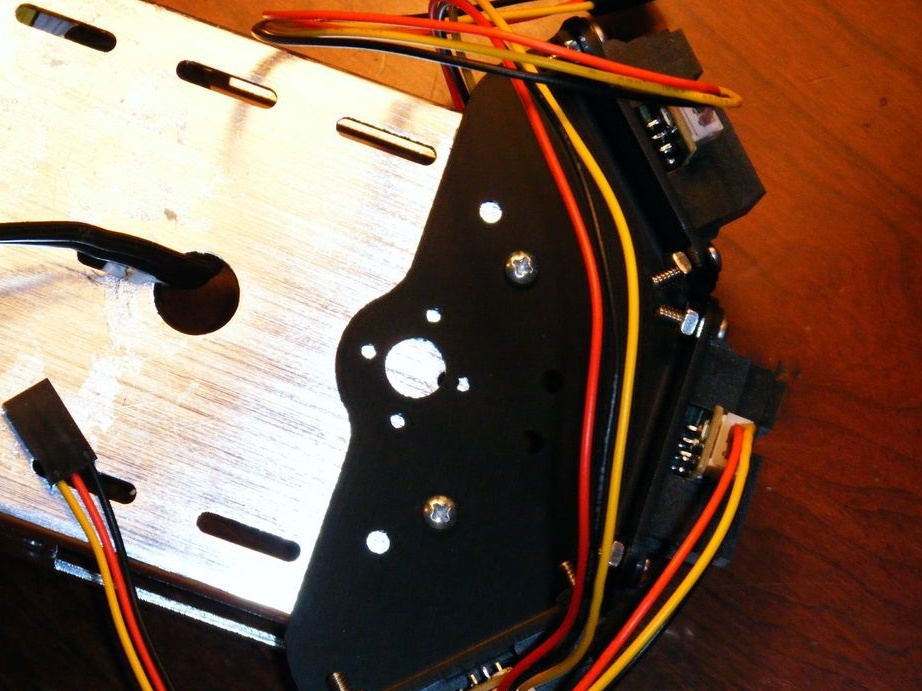
Braket üzerindeki sensörün birkaç deliği vardır, şasideki deliklerle çakışırlar. Yazar bunları iki vida ve somun ile sabitler.
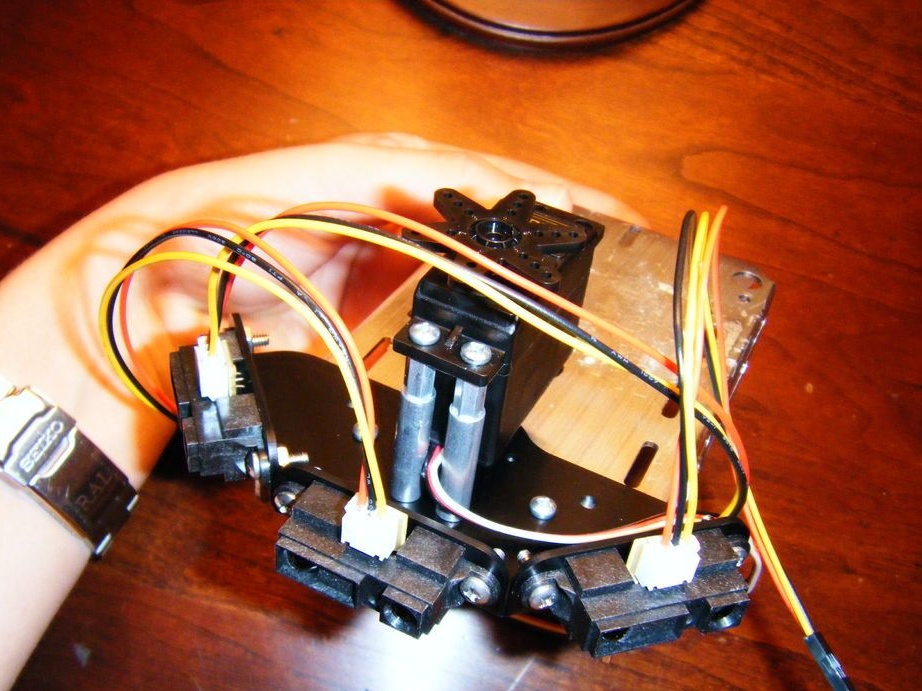
İkinci Adım Servo ile telemetre.
Robottaki servo, ultrasonik sensörün panoramik bir görüntüsünü sunar, böylece önündeki geniş bir alanı yakalar ve mesafeyi farklı açılardan ölçer. Mevcut vidalar istenen amaca uygun değildi, uygun sadece özel mağazalarda satıldı. Bir montaj braketi yapmaya karar verildi kendin yapve fazladan para harcamayın. Telemetreyi kurmak için bir pleksiglas stand yapıldı.Yazar telemetreden biraz daha büyük iki parça organik cam kesmiş, delik açmış ve bu parçaları dik açılarda yapıştırmıştır. Ayrıca, servomotor vidasından biraz daha büyük bir delik açtılar ve yardımıyla servo motoru sabitlediler.
Servo Not:
Futaba S3003'ü satın almaya gerek yoktur, 180 derece dönebilen herhangi bir servo sürücü uygundur. Bir servo ararken, Bob'un yaratıcısı sadece bu parametre tarafından yönlendirildi ve görevi tamamlayabilecek en ucuz servoyu buldu. Bu durumda, başka bir sürücü için programdaki GEMİ değerini yapılandırmanız gerekir.
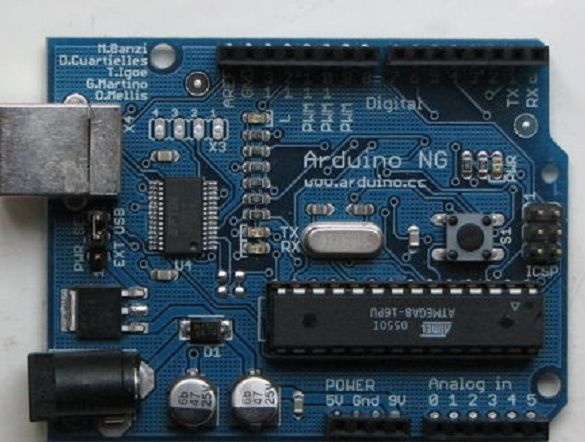
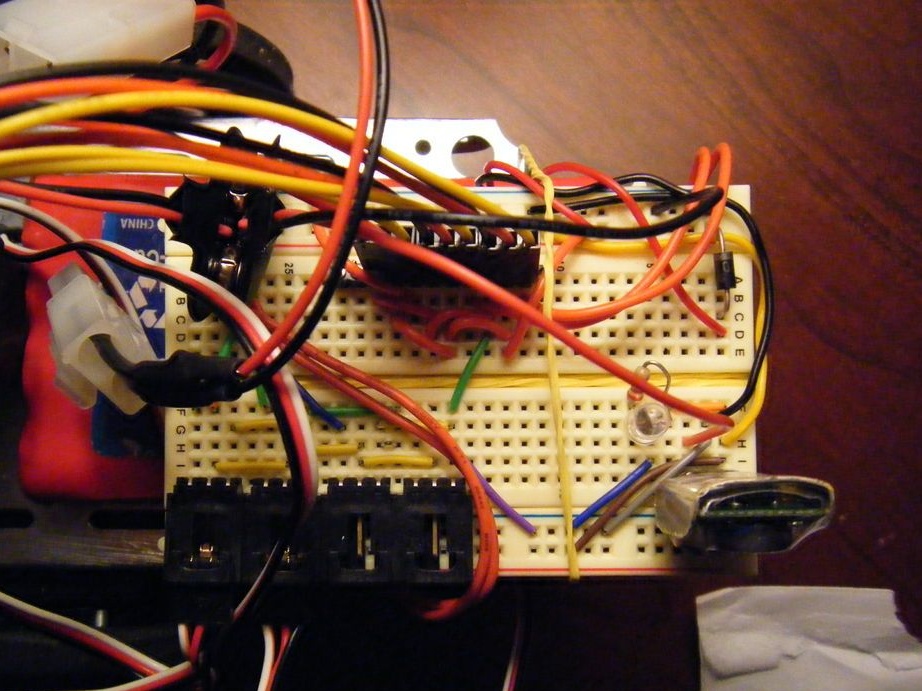
Üçüncü Adım Arduino kurulumu.
Gelişmiş performans için, Bob'un yaratıcısı ATmega168'i kullandı, düşük frekansta çalışmasına rağmen, görevleriyle çok daha hızlı başa çıkıyor ve belirlenen gereksinimleri karşılıyor.
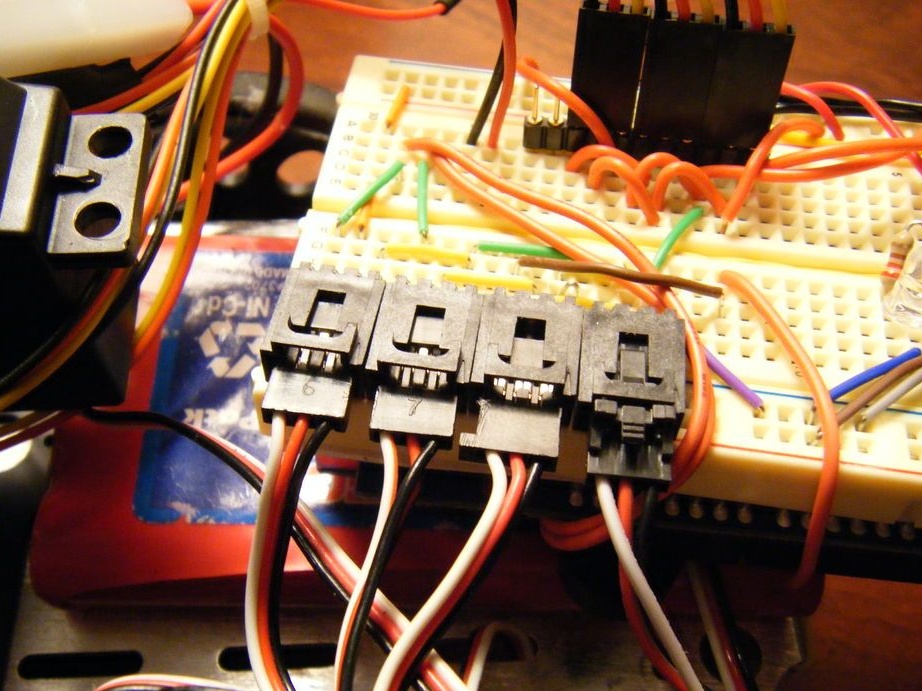
Arduino'yu üzerine monte etmek için bir prototip kartı bulundu ve kartı Arduino'ya bağladı. Onları birbirine bağlayarak yazar telleri bağlamaya başladı:
- Pim (ADC) 0: Sol GP2D12
- Pim (ADC) 1: Merkezi GP2D12
- Pim (ADC) 2: Sağ GP2D12
- Pim 5: Uzaklık ölçer servo
- Pin 6: Sol Servo
- Pin 7: Ultrasonik Uzaklık Ölçer
- Pin 9: Sağ Servo
- Pim 11: Pasta Squeaker
Proje, 5V sabitleyiciye yeterince entegre olan ek kapasitörler kullanmaz. LED ve VCC arasında 220 Ohm direnç kullanılır.
Dördüncü adım. Program kodu.
Robotun ilk oluşturulması sırasındaki önceki hatalar göz önüne alındığında, değişiklikler yapıldı, kodun anlaşılması zor değil. Ayrıca, kullanılmayan fazla parçalar koddan kesilir. Telemetreden sorumlu kodun bir kısmı Arduino web sitesinden alınmıştır. Kod makalenin altından indirilebilir.
Beşinci Adım Sonuç.
Gelecekte, yazar Bob ile deney yapacak ve bir ışık direnci ile bir ışık ve ses sensörü gibi yeni sensörler ekleyerek geliştirecektir. robot insanları algılayabilir. Modernizasyon alanı geniş, sadece hayal gücüne ihtiyaç var.
Şimdilik, Bob sadece engellerden kaçınabilir. IR sensörleri yolda nesneleri algılar ve ultrasonik telemetre IR sensörlerinin kör noktalarını kapsar ve telemetre ayrıca engeller tespit edildiğinde yolu bulmaya yarar. Pil tamamen şarj olduğunda, Bob yaklaşık 1 saat 20 dakika sürebilir. Yazar ayrıca Bob'un görünümünü nasıl geliştireceğini düşünüyor.
Bob'un Gösteri: