


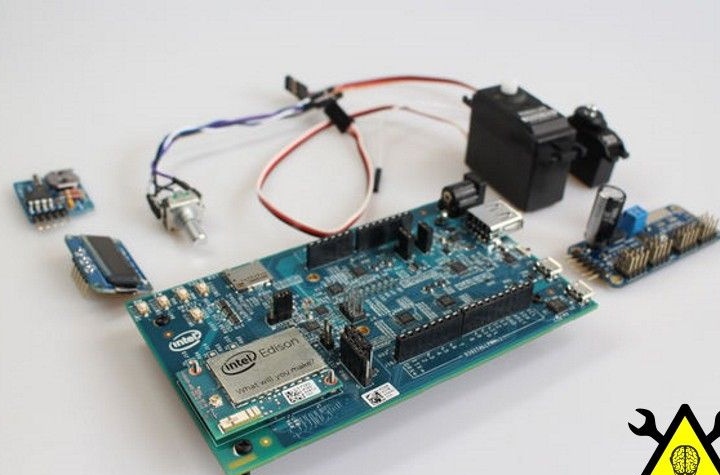
Montaj için malzemeler ve aletler:
- döner kontrolör;
- intel Edison ile Arduino Koparma Kurulu
- I2C PWM sürücüsü;
- gerçek zamanlı saat koparma;
- mini I2C OLED;
- iki servo;
- Metal dişli üç servo;
- 30 cm uzunluğunda bir servo sürücü için iki kablo;
- fiş için montaj soketi;
- iki konumlu geçiş anahtarı;
- fırça ve diş macunu;
- 5V 3A için güç kaynağı;
- plastik bir şırınga;
- somunlar ve vidalar;
- somun ve dişli çubuk;
- 61 cm x 61 cm x 3 mm ölçülerinde bir şeffaf akrilik parçası;
- 91 cm x 61 cm x 6 mm ölçülerinde kontrplak;
- 3D yazıcı.
Robot montaj süreci:
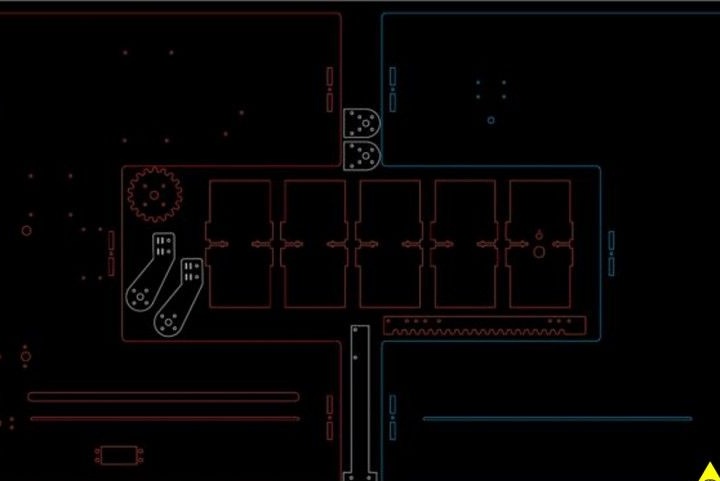
İlk adım. Mekanik kısım
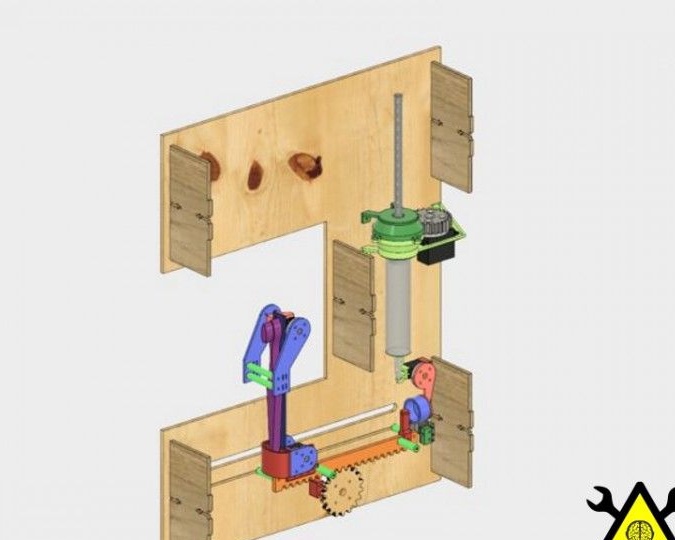
Cihaz ilk olarak Fusion 360 ve Illustrator kombinasyonu kullanılarak modellenmiştir. Bu süreçte, metalin lazerle kesilmesinin yanı sıra 3D baskıyı da içeren bütün bir teknoloji yaratıldı. Toplamda, sistem dört ana düğüme ayrılabilir. Buna bir taşıyıcı, bir diş fırçası tutucusu, bir ana gövde ve bir dağıtıcı dahildir.
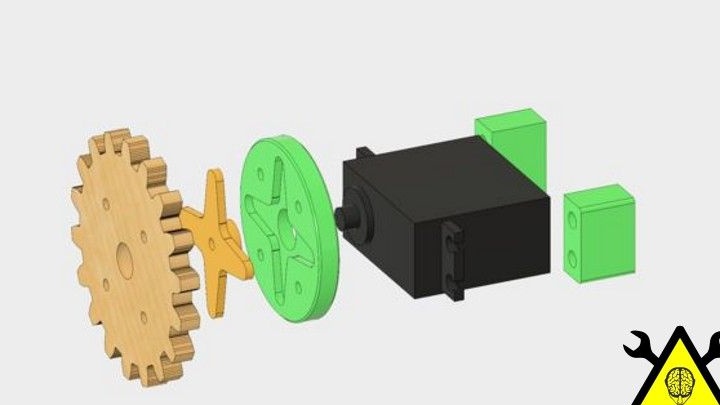
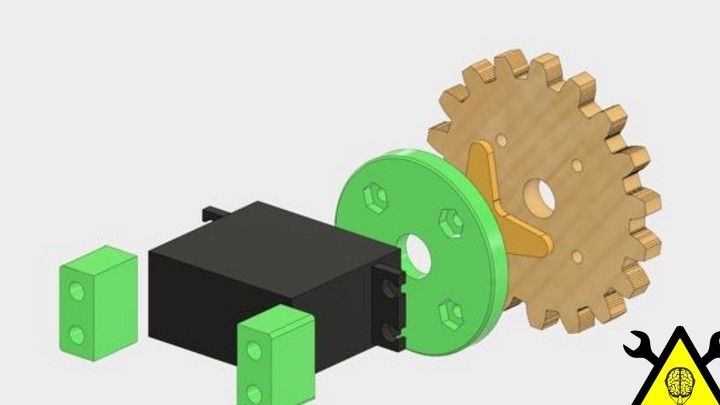
Ev yapımı ürünlerin daha geniş ihtiyaçlar için kullanılması için standart ve mikro-servolar için adaptörlerin modellenmesine karar verildi. Bu adaptörlerin standart şaftları takmak için yuvaları ve arkadaki dört somun için alanı vardır. Adaptörlerin şaftlar için tasarlanması nedeniyle, ya plakalara ya da diğer nesnelere takılmalıdır.

İkinci Adım Cihazın elektrik devresi
Güç olarak 5V ve 3A kaynağı kullanılır. Bu bir motora güç vermek için yeterlidir. Ana karta gelince, yaklaşık 500 mA tüketir ve motor sürücüleri, orijinal LED ve gerçek zamanlı saat az miktarda akım tüketir.
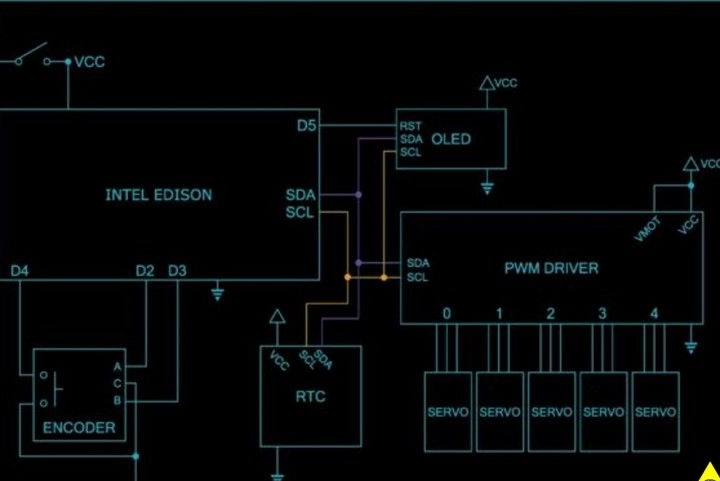
Intel Edison işlemci sistemin ana denetleyicisi olarak kullanılır. Kartların ayrılması nedeniyle, işlemci elektroniklerin diğer bileşenleri ile kolayca iletişim kurabilir. Kart motora, saate ve ekrana bağlanır.
Beş servoyu kontrol etmek için bir PWM kartı kullanılır. Motorların gücü harici bir kaynak kullanılarak kontrol edilebilir, ancak yazar Vmot'u VCC pinine bağlamaya karar verdi.Bu sayede tüm sistem 5V tarafından desteklenmektedir.
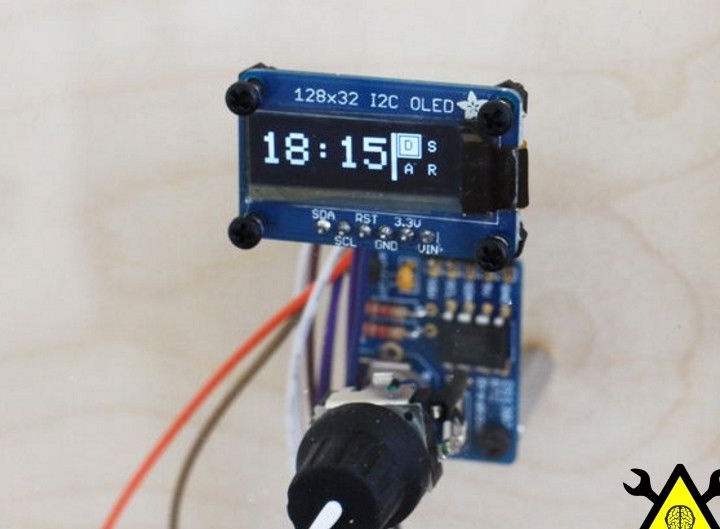
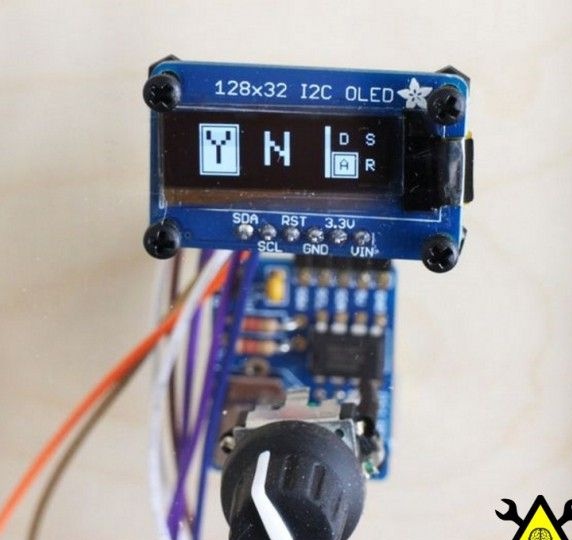
Cihazın kontrol edilebilmesi için küçük bir 128 x 32 boyutlu ekran kullanılır.Rönel sensör ana kullanıcı girişi olarak işlev görür. Sensörün çıkışları işlemcinin dijital kontaklarına bağlanır.
Üçüncü Adım Gövde montajı
Arka kısım kasa için bir destek görevi görür; 6 mm kalınlığında kontrplaktan yapılmıştır. PWM ve işlemciyi sabitlemek için dört vida kullanılır. Edison ön tarafa ve PWM arka tarafa monte edilmiştir.
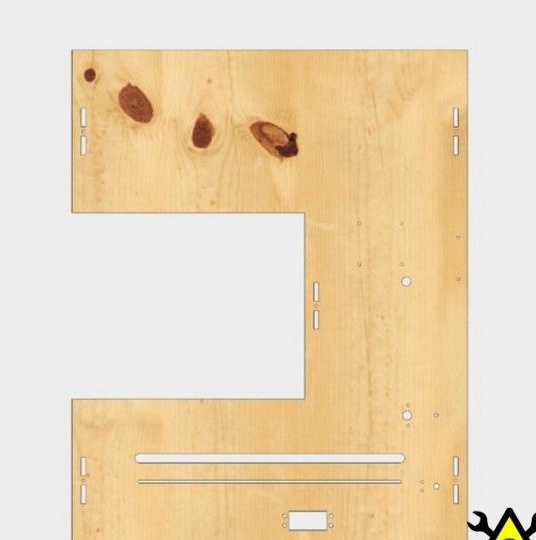
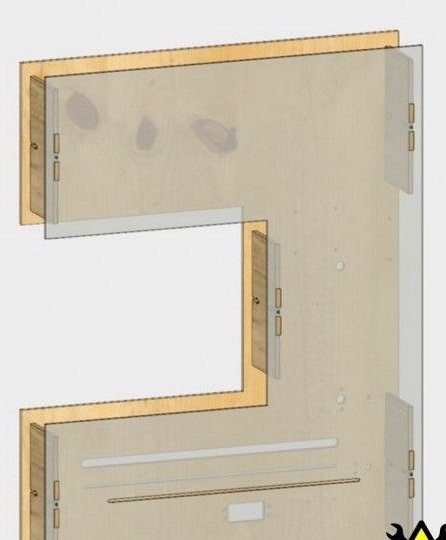
Ön ve arka panelleri bağlamak için beş ara plakası kullanılır. Ara parçalar plakalara vidalar ve uygun somunlarla tutturulur. Plakalar neredeyse simetriktir, ancak bir kenardaki çıkıntılar daha kısadır, ileri doğru uzanmazlar. Anahtar, güç konnektörü ile birlikte, alt takviyeye bağlıdır.

Ön panele gelince, esas olarak çalışma sırasında cihazı korumak için gereklidir. Ekranı sabitlemek için dört vida kullanılır; döner sensör ayrıca somunlarla bağlanır.
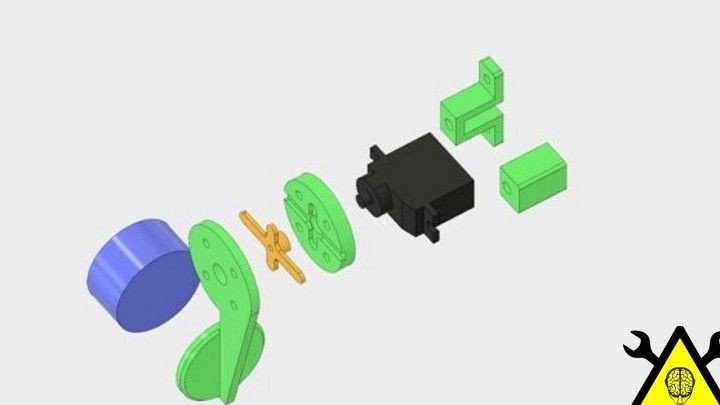
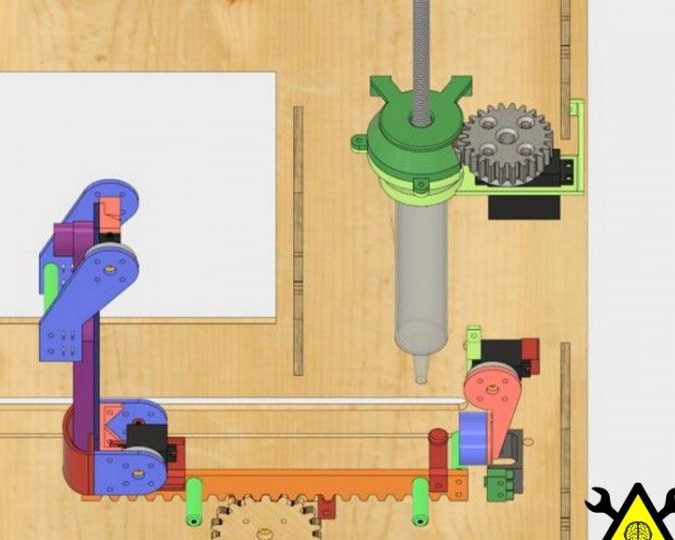
Dördüncü Adım Diş fırçası yuvası
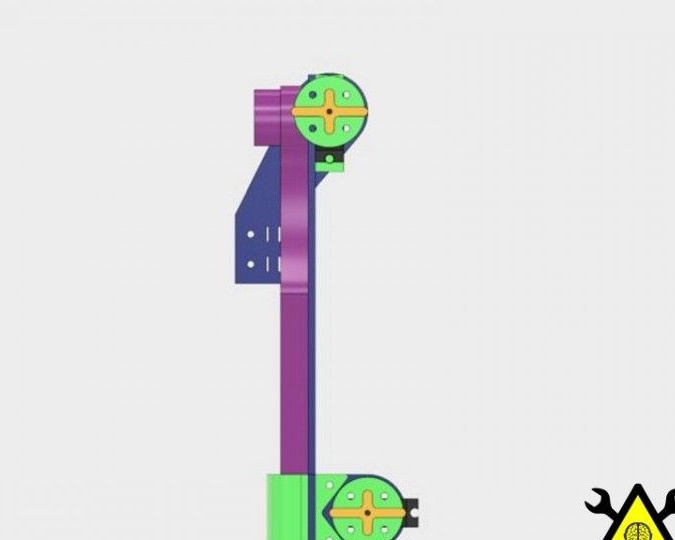
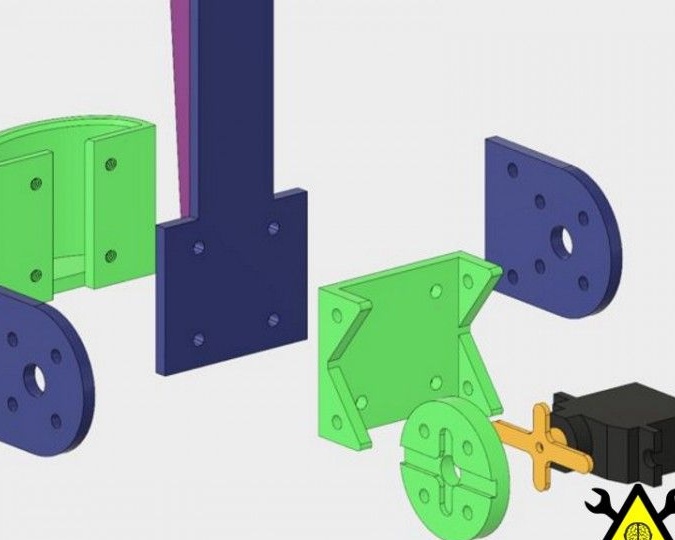
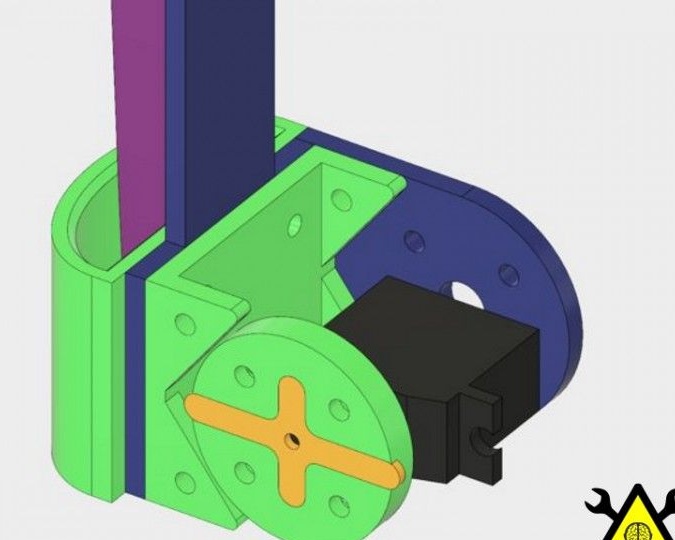
Diş fırçası tutucusunda, bileşenler tarafından tahrik edilen iki servo vardır - taban ve “kafa”. Resimde mavi ve yeşil unsurlarını görebilirsiniz. Lazer kesici ile kesilen mavi renklidir ve 3D yazıcıda basılan elemanlar yeşil renktedir.

Kafa sayesinde diş fırçası düşmez. Eller tek bir servo sürücü ile sürülür, iki conta ile sabitlenir. Servo motoru ana plakaya takmak için bir 3D adaptör ve iki vida kullanılır. Plakada dört yuva vardır, bunların arasından bir diş fırçası takılı siyah lastik bantların yardımıyla.
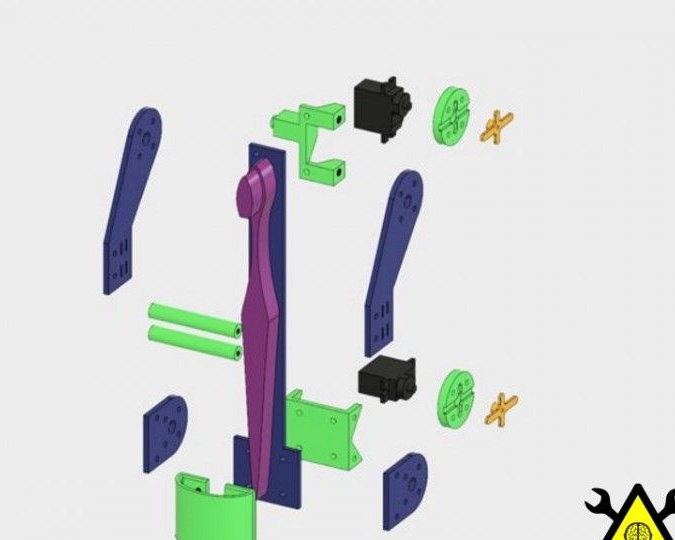
Taban küçük bir 3D fincan, fırçanın düşmesini önler. Diş fırçası düzeneğe yüklendikten sonra, servo sürücü onu tutar ve aşağı döner. Plakaları bağlamak için sekiz vida kullanılır.


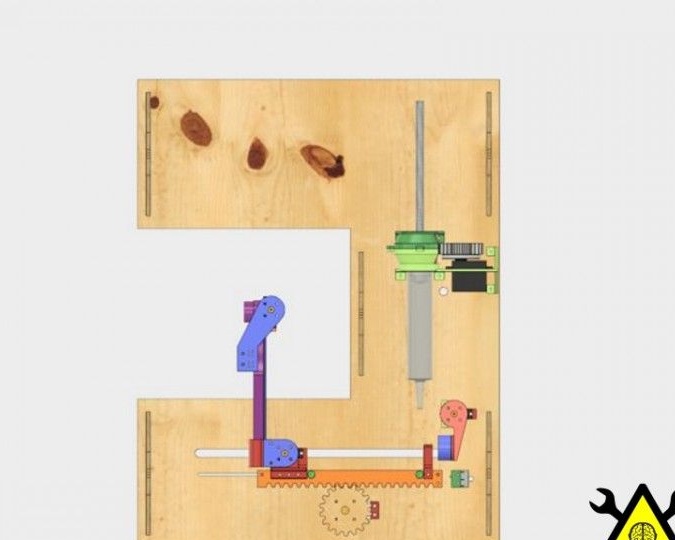
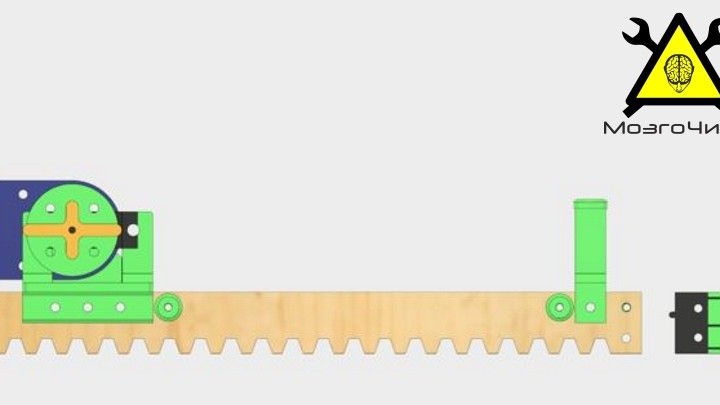
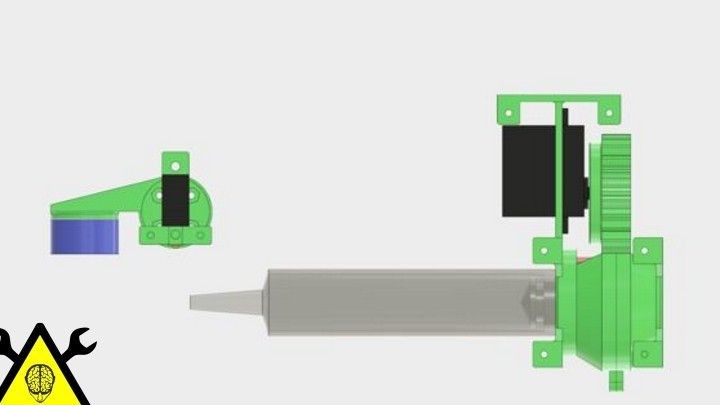
Beşinci Adım Ray montajı
Çerçeve üç benzersiz parçadan oluşur, bu bir koltuk başlığı, taşıma ve dikmelerdir. Taşıyıcı kullanılarak çerçeve tutucu takılır. Taşıyıcının kendisi üç vidayla tutturulmuştur. Ana servo tutucusundaki yükü azaltmak için koltuk başlığına ihtiyaç duyulur, çerçeve üzerindeki şaryoya daha da monte edilir.
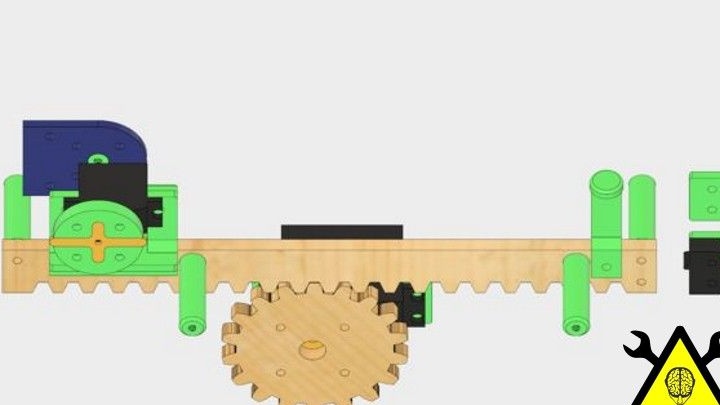
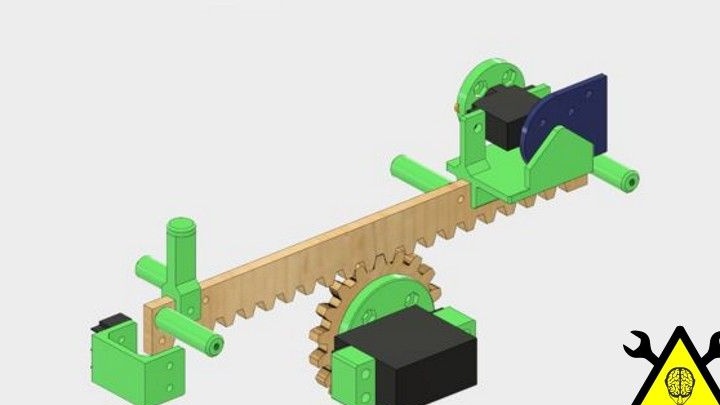
Vites şasinin altına monte edilmiştir. 6 mm kalınlığında kontrplaktan kesilir ve standart bir servo şafta tutturulur. Servo sürücünün kendisi taban plakasından biraz ofset olarak yerleştirilir, bununla bağlantılı olarak üzerinde aynı dikdörtgen destekler bulunur. Servonun kendisi dört vidayla tabana tutturulmuştur.
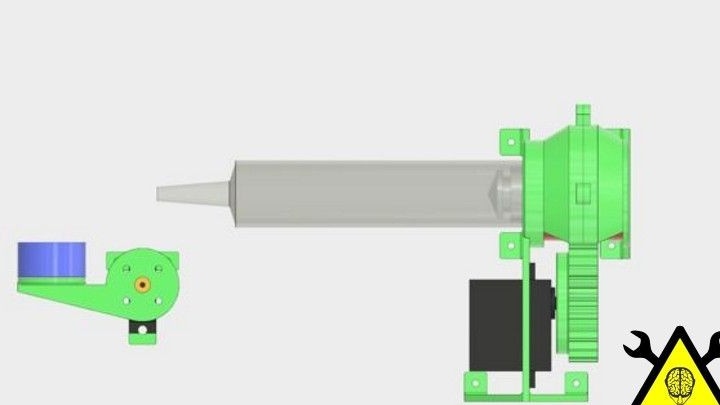
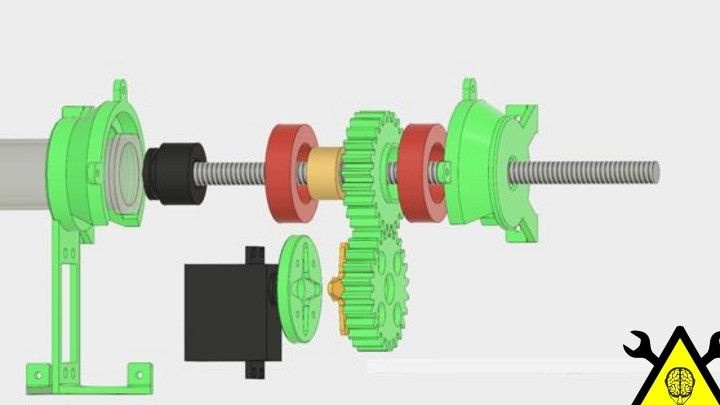
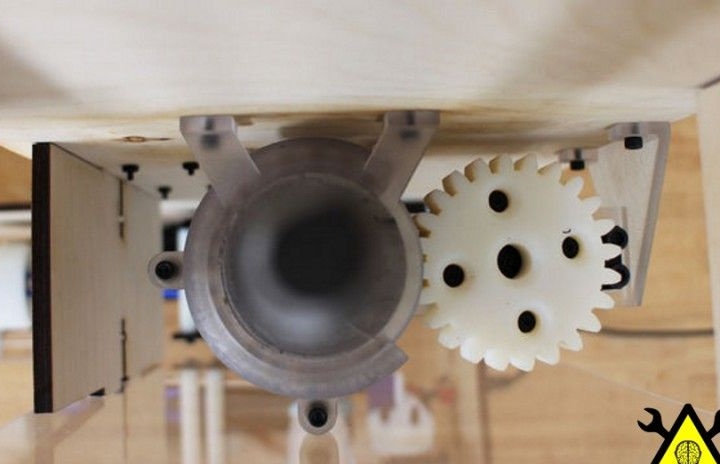
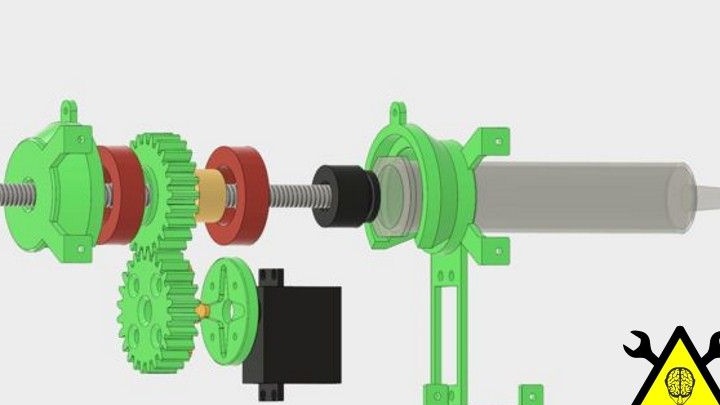
Altıncı Adım Vericinin montajı
Cihazdaki en karmaşık mekanizma doğrusal bir tahriktir. Onun sayesinde, macunun dozu gerçekleşir. Cihazın çekirdeği dişli bir çubuk ve bir somundur, bunun yardımıyla tüp sıkıştırılır. Sürücüyü sabitlemek için altı vida kullanılır.
Yedinci adım. yazılım
Toplamda, programın üç işlevi vardır: zamanı ayarlama, "alarmı" ayarlama ve ayrıca cihazı başlatma işlevi.
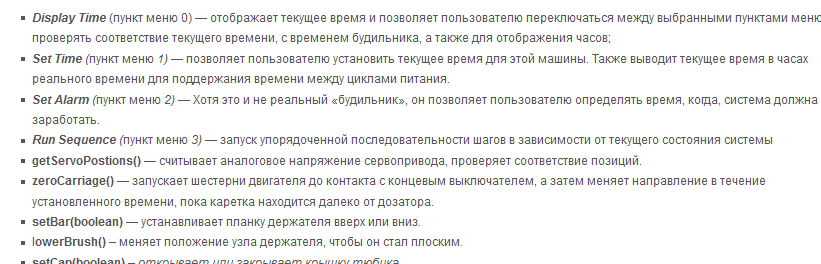
Hepsi bu, yanıp söndükten ve cihazı yapılandırdıktan sonra kullanıma hazır.