

Yazar bu projeyi daha basit bir versiyona dayandırdı. ev yapımı ve mükemmelleştirdi. Engellerden kaçınmak ve ışığa doğru hareket etmek için sensörler tekneye yerleştirilir. Teknedeki kontrolör nasıl kullanılır? Arduino, ön tarafa bir ultrasonik sensör monte edilmiştir ve yanlara ışık sensörleri yerleştirilmiştir. Bu basit tekne duvarlara çarpmaz ve bir el feneri ile kontrol edilir.
Malzemeler ve araçlar:
- İzolasyon bandı / yapışkan bant
- Sıcak tutkallı termoglue
- DC motorlar 2 adet
- Plastik şişeler 2 adet
- teller
- Küçük pervaneler 2 adet
- Arduino, bilgisayar ve USB kablosu
- Plastik kutu
- 9V pil ve konektör
- Güç diyotları (tip 1N4004)
- Dirençler
- Transistör MOSFET veya TIP 120
- İki fotosel ve iki düğme
- makas
- Havya ile lehim

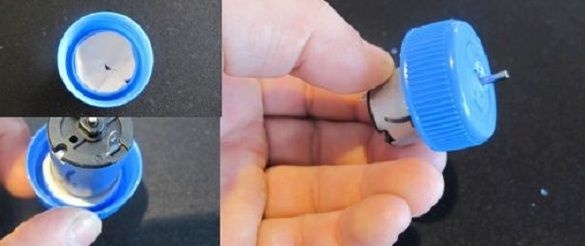
Adım 1. Motorların takılması.
Kapaklar şişelerden çıkarılır ve her birinde bir delik açılır. Kapağın içinde, yazar delikleri kapatmadan sıcak tutkalı sıkar. Motor milini deliğe yerleştirdi ve tutkal üzerine koydu. Tutkal kuruduktan sonra şaft serbestçe döner. Aynı prosedür ikinci kapak için de geçerlidir.
Adım 2. Şişelerin takılması.
Şişeler, üç şerit bant bandı yardımıyla bir sal prensibi ile birbirine bağlanmıştır.

Adım 3. Motorlara lehimleme.
Fişlere monte edilen motorların telleri olmadığından, bunları lehimlemek gerekiyordu, tellerin uzunluğu yaklaşık 25-30 cm idi.

Adım 4. Şişelerdeki kesim.
Tellerin teknenin gövdesine düşmesi için üst kısımlarından küçük bir yuva yapılır.

Adım 5. Motorların emniyete alınması.
Ayrıca, yazar iyi bükülmediği için şişelerin üzerindeki kapakları büküyor; Sıcak tutkal kullanmak zorunda kaldım. Teller şişeler üzerinde hazırlanan deliklerden itilir.

6. Adım.
Plastik bir kutu iki şişeye yapışır. Elektronik kapasitansında, teller için delikler açabilir veya telleri kutunun arkasından tutabilirsiniz. Şişelerdeki teller için delikler sıcak eriyik yapıştırıcı ile yalıtılmıştır.

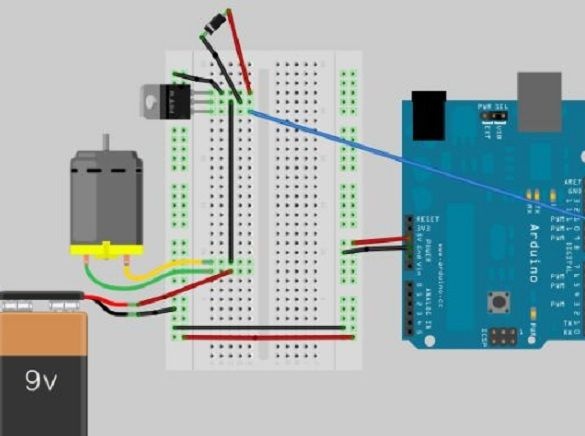
Adım 7. Bağlantı şeması.
Devre, anahtar olarak bir TIP 120 transistörü kullanır (benzer MOSFET veya Darlington transistörlerini kullanabilirsiniz). Arduino motorlar için yeterli güce sahip olmadığından, büyük miktarda akım tüketirken yükü değiştirmek için kullanılır. Bu devre ilk önce ve sonra ikinci motor için monte edilir (ikinci motor için başka bir aküye gerek yoktur).
Adım 8. Sensörler.
Ultrasonik sensör teknenin önü için mükemmeldir, yolda engeller konusunda uyarır. Fotoseller anten gibi davranır ve teknenin ışığa yüzmesini sağlamak için kullanılır.Yandaki düğmeler engel sensörü olarak kullanılır. Ayrıca kodu değiştirebilir ve kızılötesi gibi diğer sensörleri de kullanabilirsiniz.

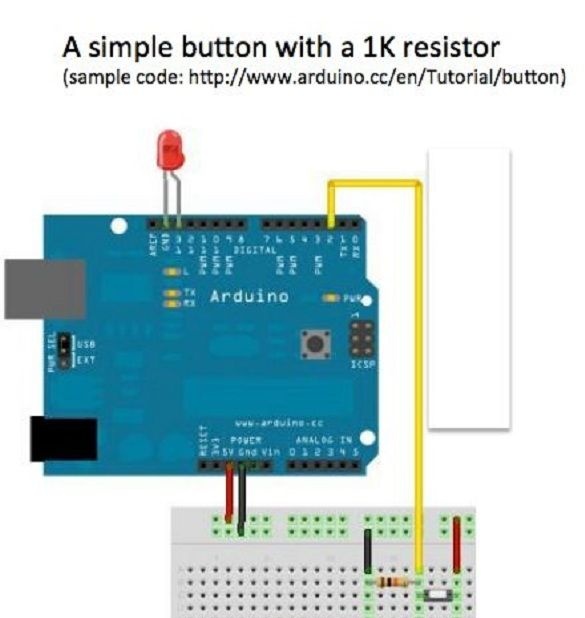
Adım 9. Sensörler için şemalar.
Şema, basit bir düğmenin ve 1K direncinin bağlantısını gösterir. Her iki düğmenin şeması tekrarlanır, düğmeler teknenin her iki tarafına yerleştirilir. Bir çarpışmada teknenin hareketini değiştirmekle sorumlu olacaklar.
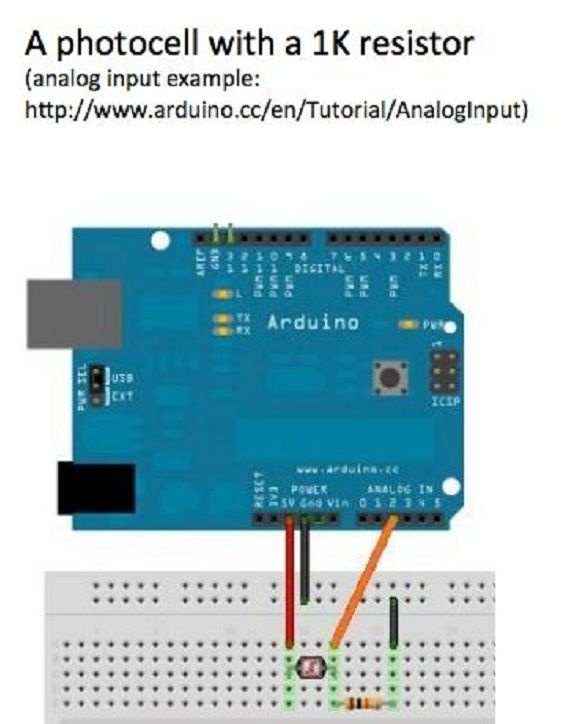
Aşağıdaki şekilde 1K dirençli ve fotoselli bir devre gösterilmektedir. Yazar 2 kez yaptı ve fotoselleri teknenin karşı taraflarına yerleştirdi.
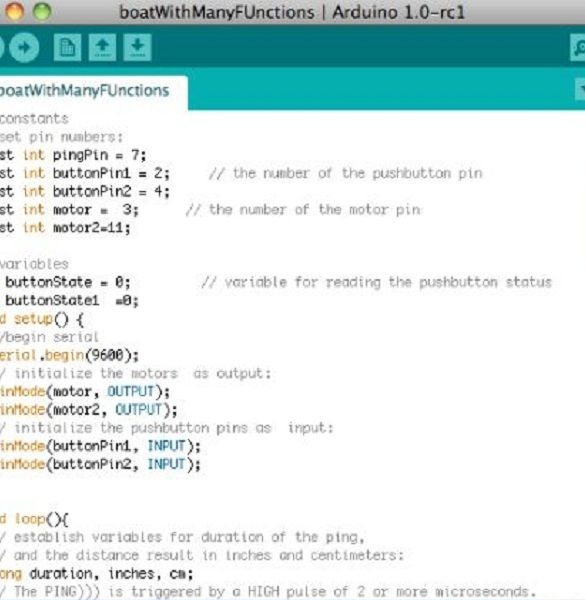
Adım 10. Program kodu.
Yazar, kodunu kullanım için indirme fırsatı sağladı, böylece böyle bir tekne monte edecekler için temel işlevsellik sağladı. Kod fotoseller, telemetre ve düğmeler için destek içerir. Tekne önündeki engellerden kaçınmaya çalışacak ve yandan engellerle karşılaştığında ters yöne dönecektir. Tüm sensör setini kullanma arzusu yoksa, ancak sadece bazılarının her biri için ayrı bir kod vardır. Makalenin altındaki tüm kodları indirebilirsiniz.
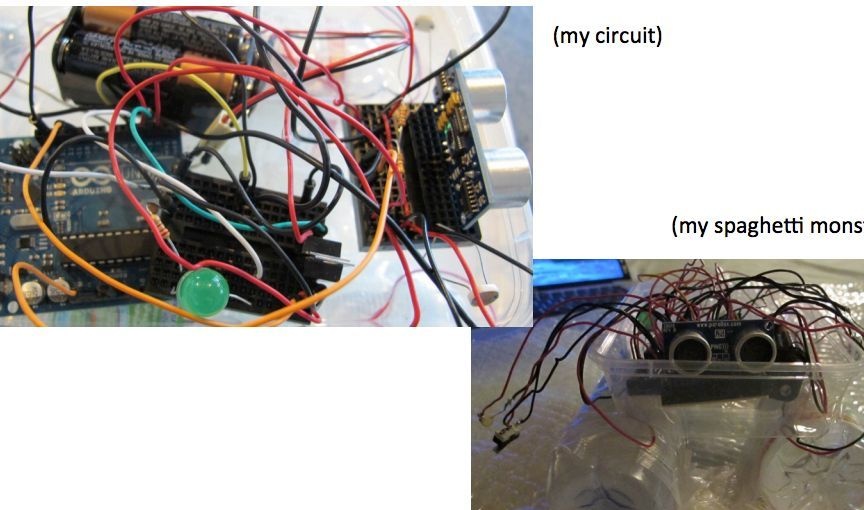
Adım 11. Teknenin montajı.
Montajlı devre, Arduino ve piller kutulu.
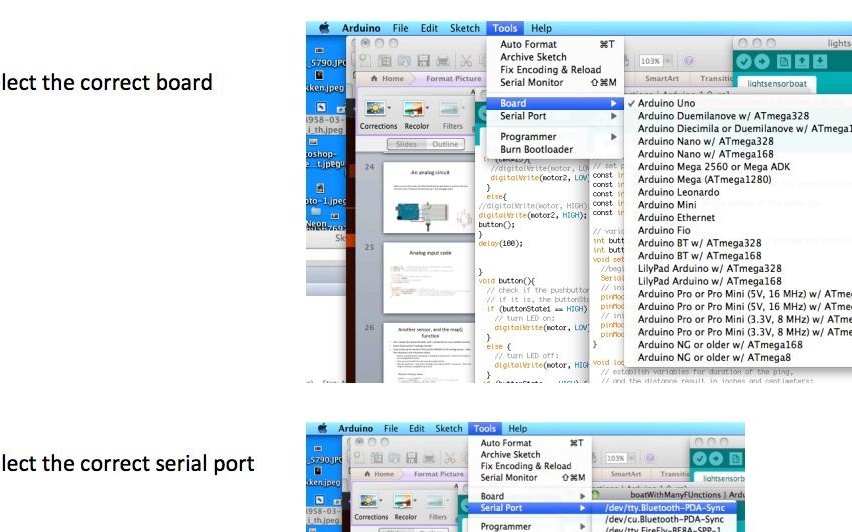
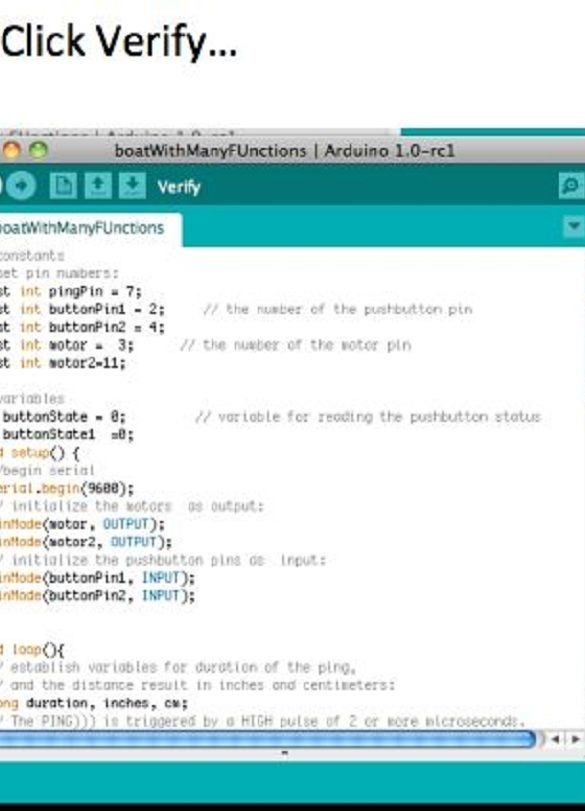
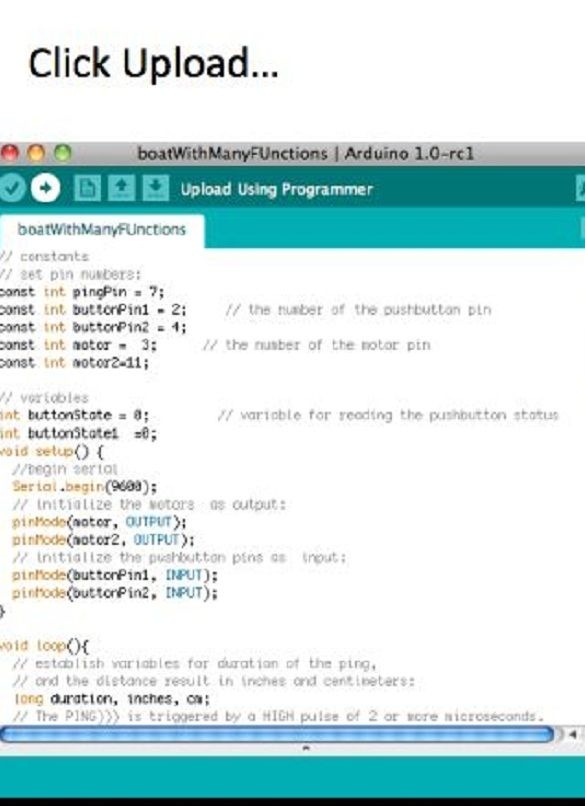
Adım 12. Çizimi indirin.
Daha sonra, doğru dosyayı ve bağlantı noktasını seçerek Arduino IDE açılır, daha sonra yazar kodu derleyip denetleyiciye yükler.
Adım 13. Suya dayanıklı ve test.
Yazar ek olarak sıcak su tutkalı ile su girişinin tüm potansiyel yerlerini izole etti. Ayrıca tüm kabloları kısa devreden izole eder. Arduino'lu konteyner aynı kutu ile kaplanır ve elektrik bandı ile kapatılır. Pervaneler motorlara bağlanır. Burada tekne hazır, şimdi su üzerinde test yapmaya başlayabilirsiniz.



Teknenin ön testine sahip video: