


Üretim için malzeme ve araçlar:
- kalın karton (çok fazla parçaya ihtiyacınız var);
- arduino (yazar 210 s için bir analog kullanmıştır);
- 80 r'a mal olan küçük bir breadboard;
- iki ultrasonik mesafe bulucu (maliyet 300 r.);
- motor kontrolörü (80 s.);
- tekerlekli iki dişli motor (300 s.);
- 18 V şarj kontrolörüne sahip pil takımı;
- birkaç metre bükülmüş çift;
- eski bir elektrikli süpürgeden türbin;
- bilgisayar soğutucu.
Üretim süreci:
İlk adım. Robot için bir döner platform oluşturuyoruz
İlk için ev yapımı yazar "Tank Savaşı" oyunundan bir tank kullandı, tüm gereksiz parçalar oyuncaktan atıldı, sadece gövde kaldı, motorlar ve tekerlekler kaldı. Bundan sonra, bir motor sürücüsü ve bir ultrasonik telemetre olan Arduino UNO kuruldu. Güç kaynağı olarak üç adet lityum 3.7 V pil kullanıldı.
Bu tasarımın birkaç dezavantajı vardı. Örneğin, tekerleklerin platformun arkasında olması nedeniyle, robotun dönmesi problemleri vardı, robot sık sık savruluyordu.
Ayrıca, çok yüksek hareket hızı nedeniyle, robotun bazen telemetre sinyallerine cevap vermek için zamanı yoktu ve çöktü.


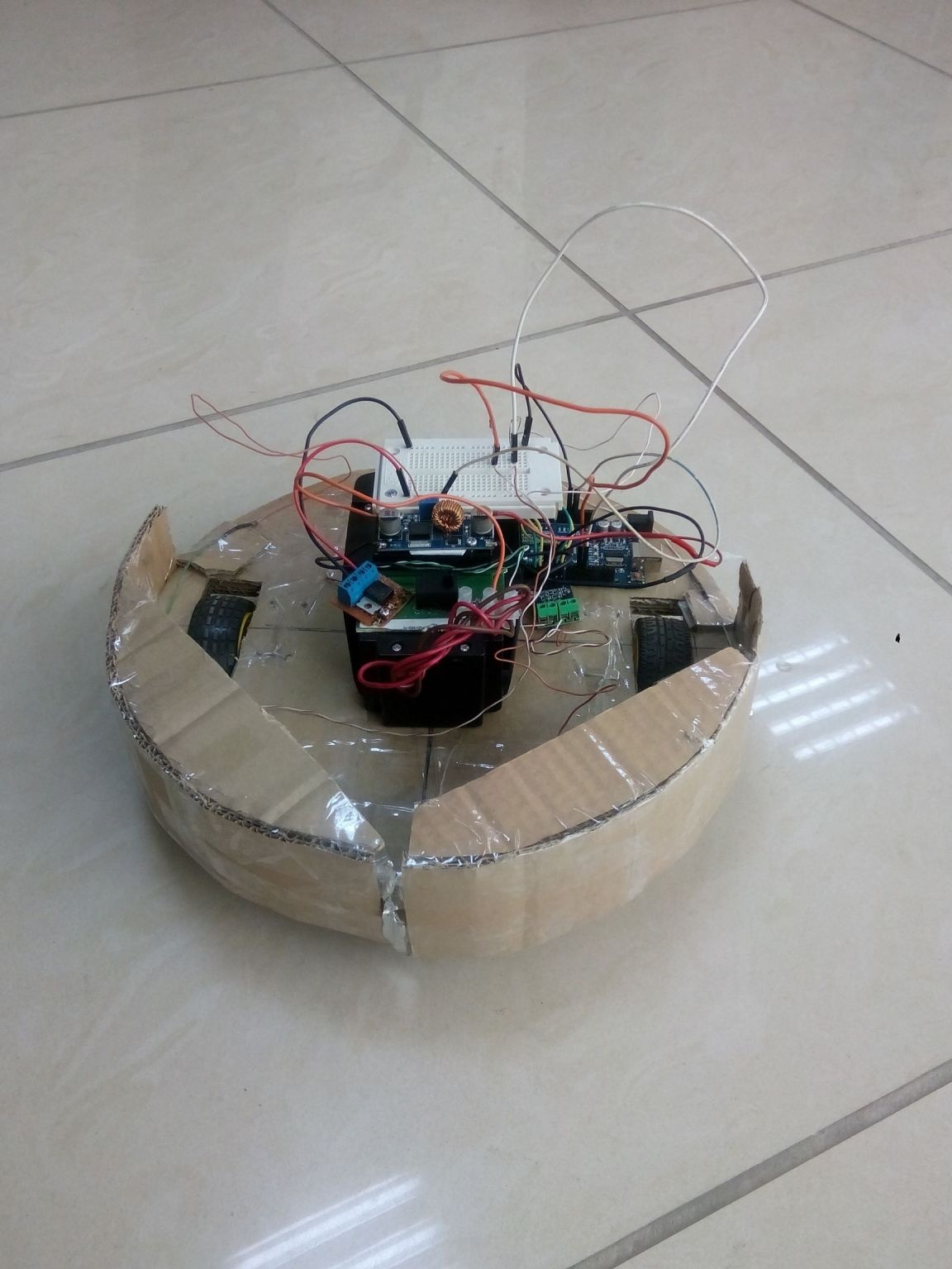
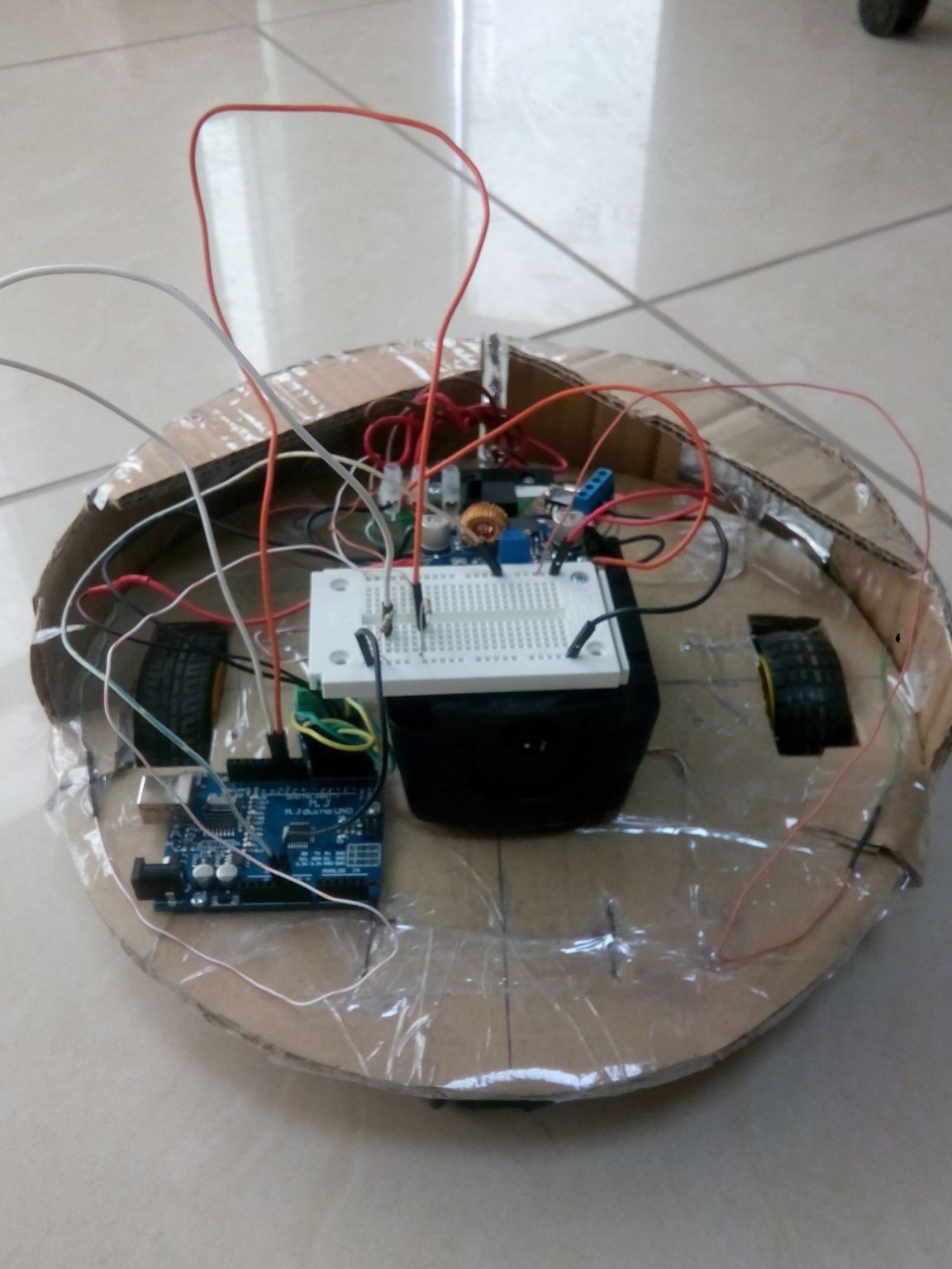
Tüm problemler yeni bir karton platformu monte edilerek çözüldü. Bunu yapmak için, 30 cm çapında 2 daire kesin ve daha sonra bunları liflere yapıştırın. Sonuç, oldukça sağlam bir bükülme tasarımıdır. Motorlar ve dişli kutuları gelince, önceki ev yapımı malzemelerden alındı.
İkinci Adım Sensörler oluşturma
Başlangıçta, robot telemetreler tarafından yönlendirildi, ancak yazar çalışmalarını beğenmedi ve sonunda onlardan kurtulmaya karar verildi. Robotlar daha uygun davranmaya başlarken, temas tamponları ile değiştirildi ve daha az yatırım gerekiyor.

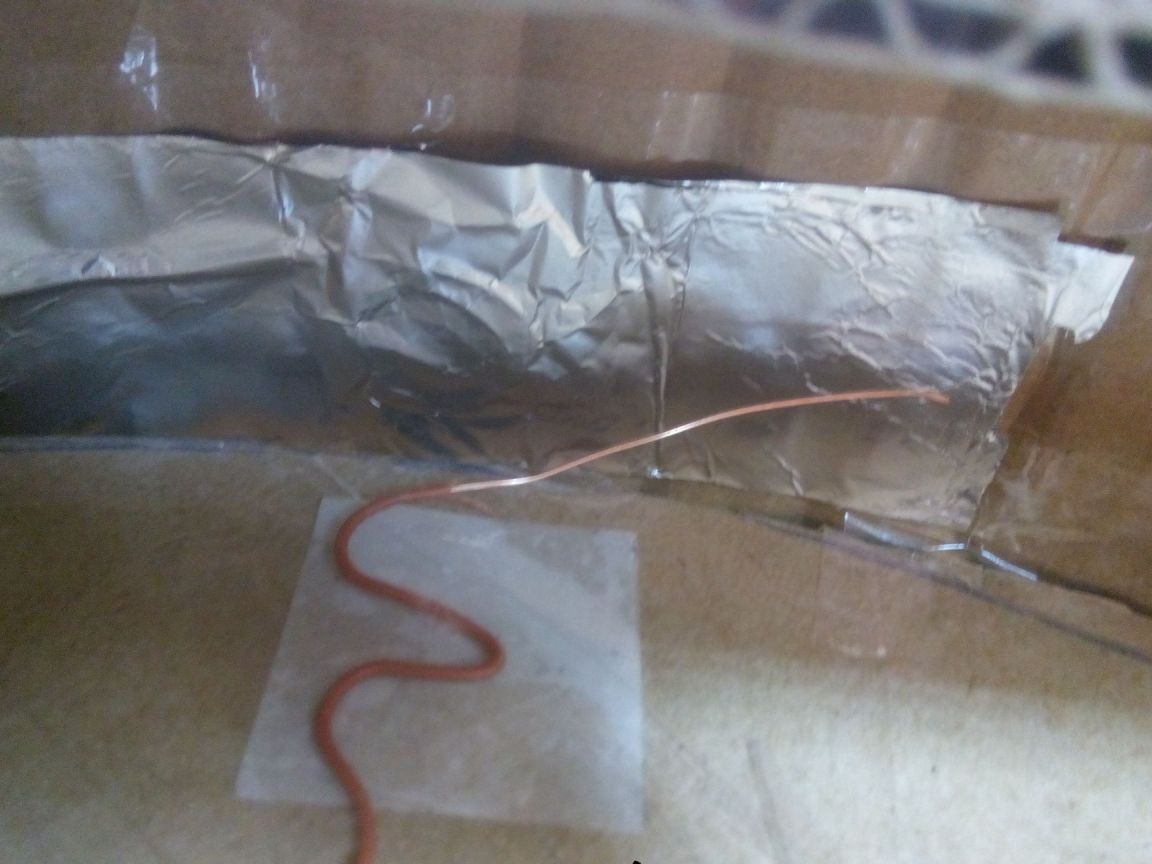
Temas tamponları çok basit bir şekilde yapılır.Karton almanız ve folyoyu bir tarafına yapıştırmanız gerekir, bu ilk temas olacaktır. Bu folyoya +5 V'luk bir voltaj uygulanmalıdır Platformun karşısında, bükümlü bir çift kablodan kavisli bir kablo takmanız gerekir, bir direnç üzerinden bağlanır, böylece daha az yanlış pozitif olur. Robot bir şeye çarptığında, temaslar kapanacak ve sonra elektronik robotu rastgele bir yöne çevirir.
Üçüncü Adım Elektrikli süpürge ve toz torbası yapmak
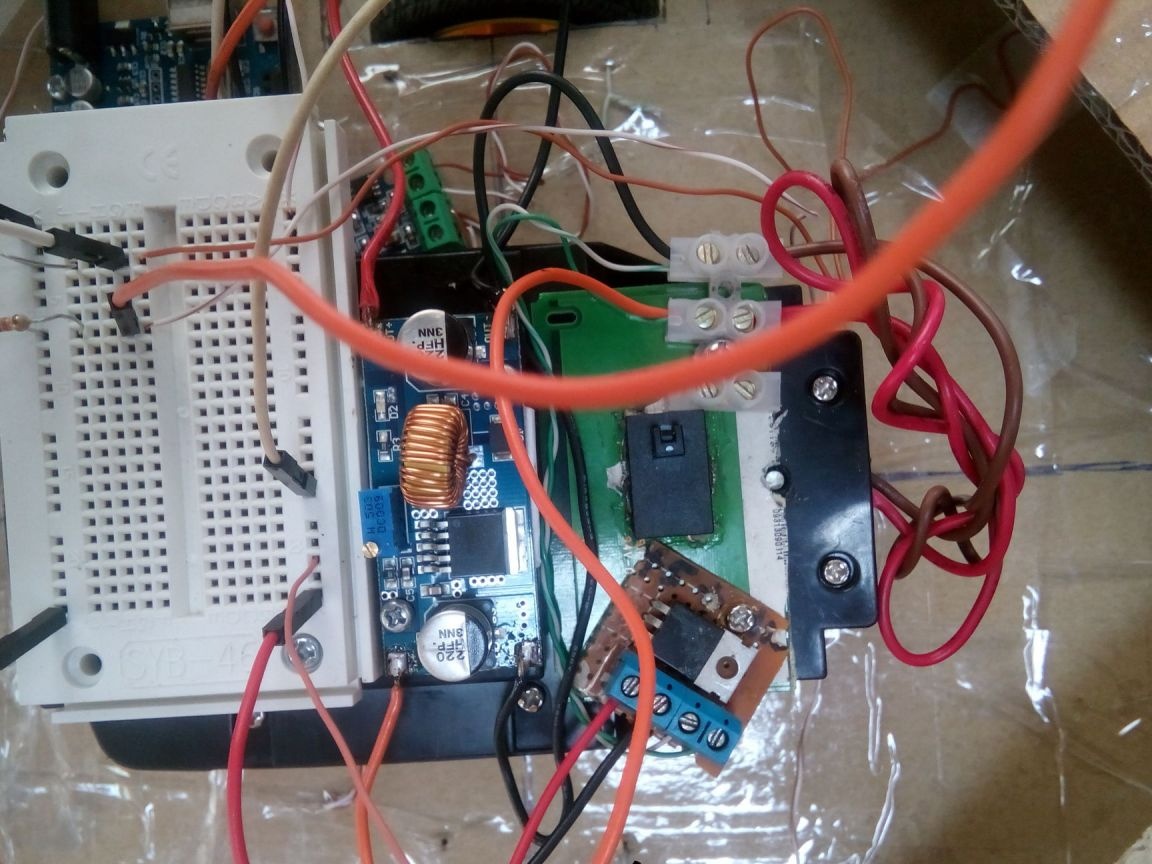
Karton ve seloteyip gibi malzemeler sayesinde hemen hemen her düzeni hızlı bir şekilde monte edebilirsiniz. Türbinin çalışması için doğrudan aküden 18 voltluk bir güç kaynağı kullanılır. Bu yük ile soğutucular ısınır, ancak çalışırlar.


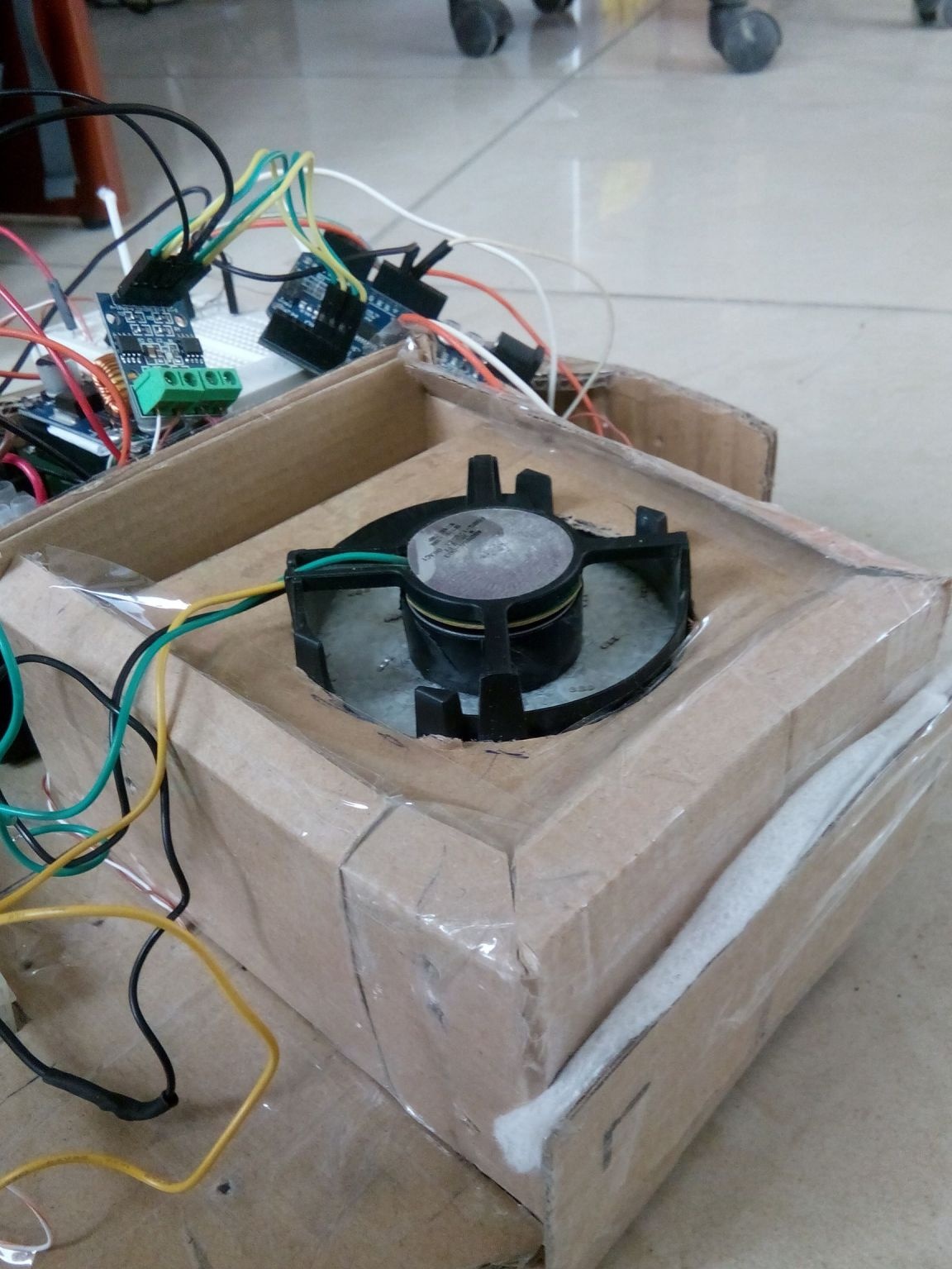


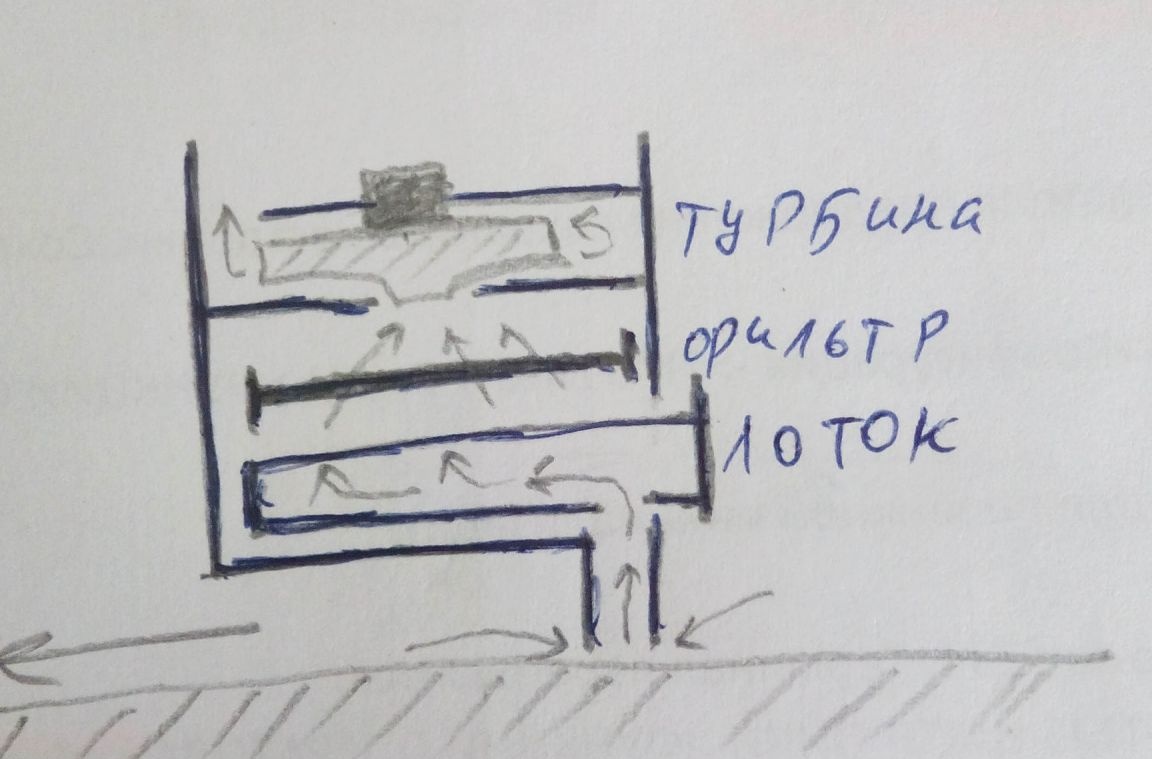
Türbin yapmak için bir bilgisayardan bir soğutucu alınır ve daha sonra tüm bıçaklar ondan kopar. Daha sonra, elektrikli süpürgeden türbin soğutucuya bağlanır, süper yapıştırıcı ile yapıştırılmalıdır. Buradaki en önemli şey kesin olarak yapışmaktır, dengesizlik olmamalıdır. Yük ve 18 Volt güç kaynağı olmadan, soğutucu yaklaşık 2600 RPM üretir ve bu da mükemmel çekiş sağlar. Sonuç olarak, tüm yapı fotoğrafta görülebileceği gibi monte edilir ve bundan sonra robot test edilebilir.
İşlem algoritmasına gelince, çok basit. Robot bir şeye çarparsa, rastgele bir açıyla döner.
Gelecekte, yazar daha güçlü olması için platformu kontrplaktan çıkarmayı planlıyor. Ayrıca, daha verimli çöp toplama için iki fırçanın önüne yerleştirilmesi planlanmaktadır. Üflenen hava, tozu daha verimli toplamak için platformun altına yönlendirilebilir.