

Robotun üretimi için malzemeler ve aletler:
- 1,5 l'lik herhangi bir plastik şişe;
- kontrol panelindeki eski bir makine;
- Arduino Proto Shield seti;
- yazılım paketi Arduino Uno;
- bağlantı kontakları (set);
- Kadın / Kadın tipi jumperlar kümesi;
- 6 voltluk güneş paneli;
- İki Paralaks servo (sürekli dönüş);
- Paralaks 4-6VDC tipi iki standart servo;
- Çarpışma sensörü Paralaks Ping Sensörü;
- dört adet AA pil için tutucu;
- 9V pil için tutucu;
- dört fotodirenç;
- LED'ler için dört tutucu;
- 10K ohm başına dört direnç;
- bir mikro 1A diyot 1N4001.


İhtiyacınız olacak aletlerden: lehim, pense, dremel, yan kesiciler ve başka bir alet ile bir havya.
Robot montaj süreci:
İlk adım. Robot beyin cihazı
Arduino Uno mikrodenetleyici, küçük projeler için tasarlandığı ve C ++ kullanılarak programlandığı için bu robot için en uygunudur.
Robotun dört servosu var, biri tekerlekleri kontrol ediyor, görevi tekerlekleri sürekli olarak döndürmek. İkinci servo robotun kafasını kontrol etmek için gereklidir, üzerine çarpışma sensörleri monte edilir. Ve başka bir servo motor, robotun eksenini kontrol ederek onu dönmeye zorlar.
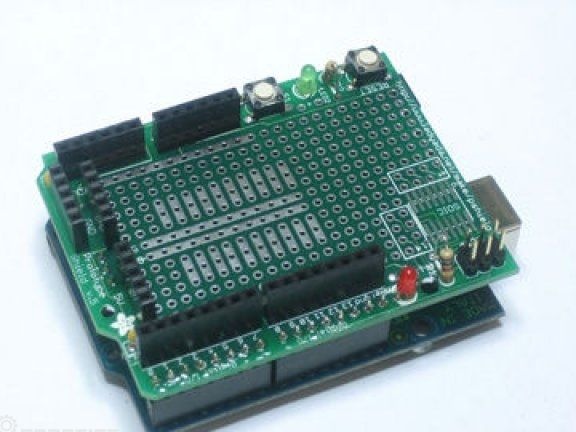
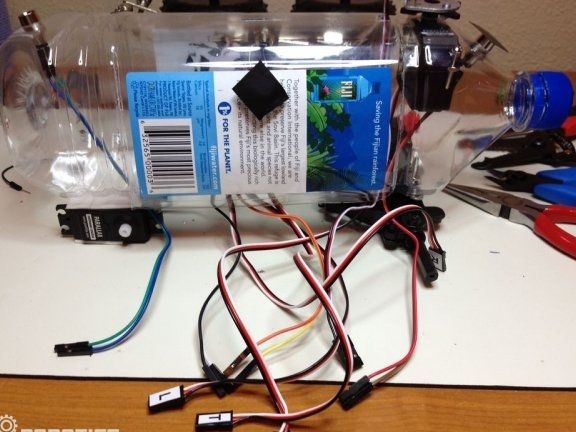
Arduino Proto Shield kartının şişede bulunacağını anlamak önemlidir, bu nedenle çeşitli sensörleri, servoları ve daha fazlasını bağlamak ve ayırmak için uygun bir elektrik devresi yapmanız gerekir. Bu amaçlar için gerekli tüm Adafruit temaslarına sahip Proto Shield kartı mükemmeldir. Kişiler Proto Shield ekranına lehimlenmeli ve tüm öğeler jumper'larla bağlanmalıdır.
Kartın orta kısmında +5 V ve GND'ye bağlı iki kanal vardır. Bu kanalların sağ ve sol taraflarında dikey paneller görülebilir. Dikey paneller ve iki kanal arasında 5 ayrı ayrı kontak bağlamak için gereklidirler. Buradan, servo motorlar kontrol darbelerinin yanı sıra güç alacaktır.
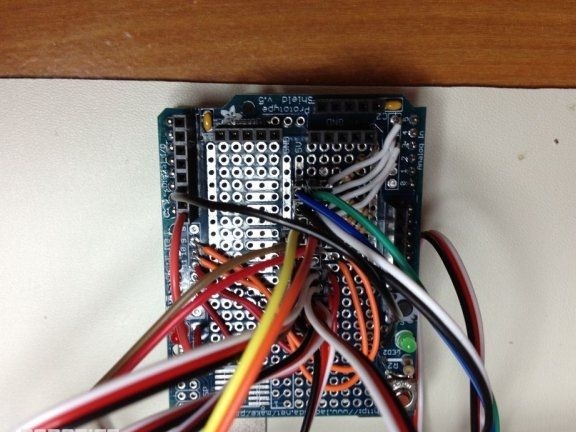
Aşağıdaki fotoğrafa bakarsanız, Proto Shield ile gelen kontakt konektörlerin dijital çıkışların ikinci tarafına ve analog kontaklara lehimlenmediğini görebilirsiniz. Bu, kabloları doğrudan panele lehimleyerek olduğu gibi bırakılmalıdır.
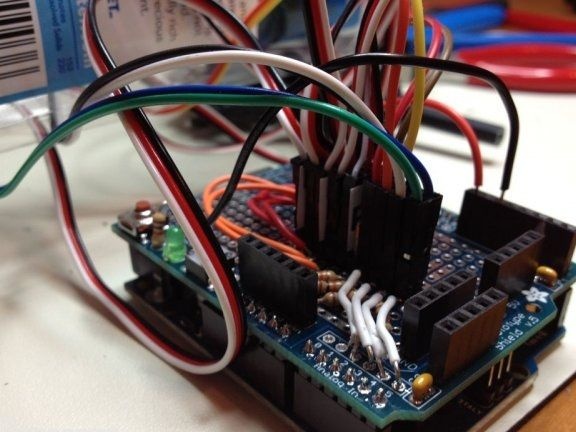
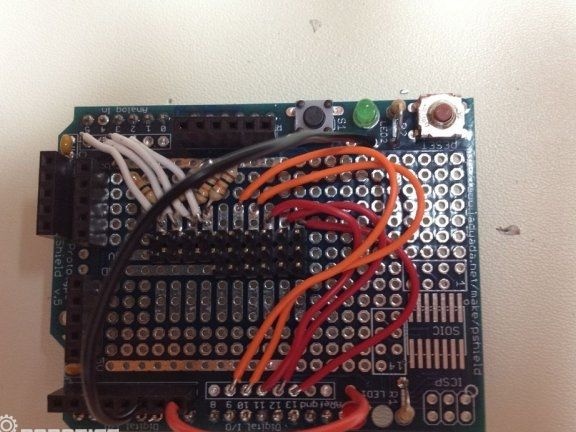
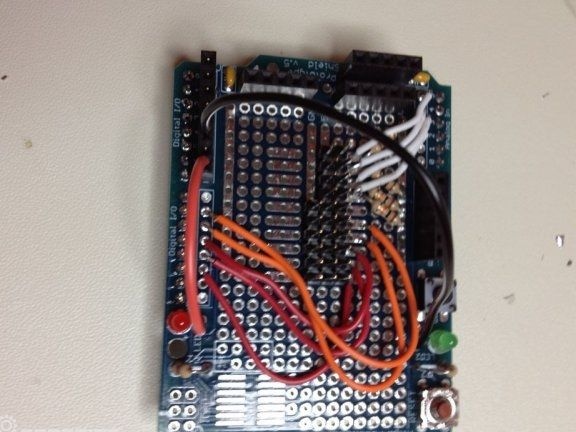
Kabloları PWM çıkışlarına (servo sürücüler için) ve ayrıca fotoğraf dirençleri için analog olanlara bağlamanız gerekir. Her fotodirenç için bir adet 10K direnç ekleyin.
Proto kartında 7 ve 9 pinleri vardır, bunların kırmızı ve yeşil LED'lerin pozitif pinlerine bağlanması gerekir.
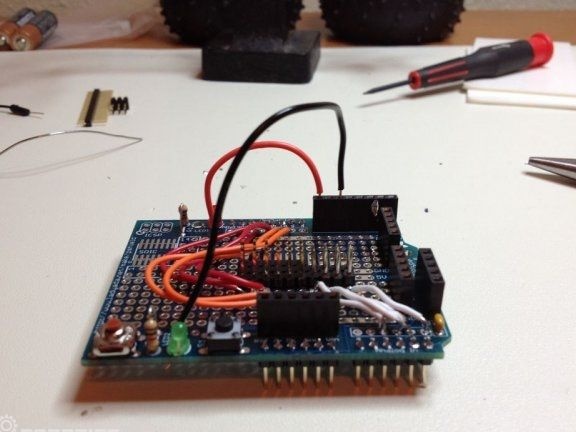
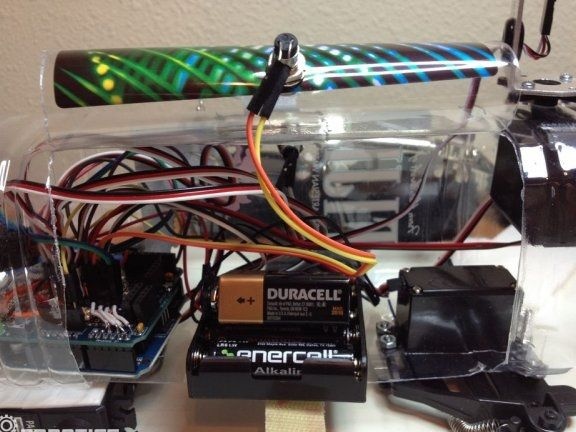
Dört servosu ve Arduino bulunan robotun normal çalışması için iki güç kaynağına ihtiyaç vardır. Mikrodenetleyici 9V güç gerektirir. Çarpışma sensörleri ve servolar dört adet AA pil ile çalışır; 6V güneş paneline bağlanırlar.
Güneş paneli ile pil arasında ters akımı önlemek için, devreye bir diyot takılmalıdır.
İkinci Adım Sensör Hazırlama
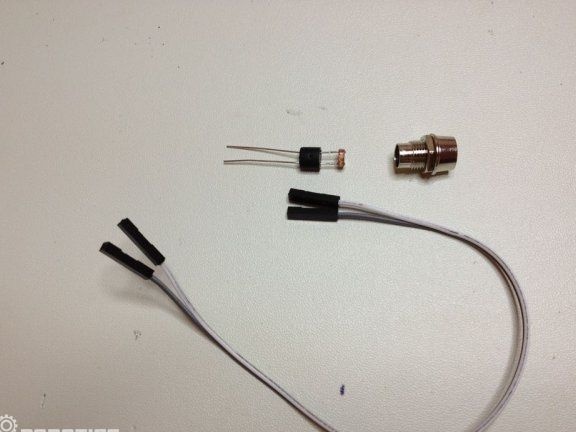
Fotodirençler platforma tutucular kullanılarak monte edilir. Bu, robotun montajı veya iyileştirilmesi sırasında bunları hızlı bir şekilde çıkarmanızı sağlar. Dişi / dişi jumper'ın bir ucu fotodirençiye, diğer ucu Proto Shield panosuna bağlıdır. Kauçuk contalar kısa devre riskini önler.



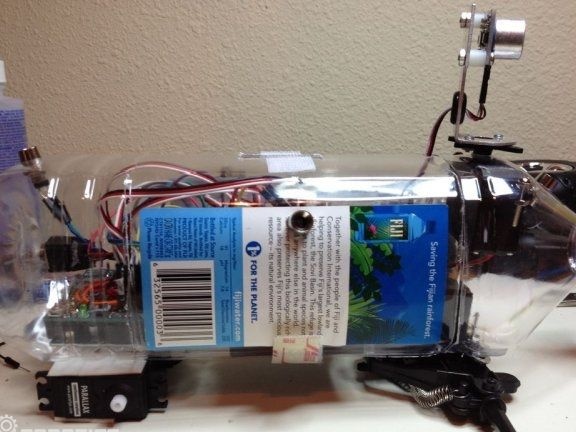
Üçüncü Adım Şasi montajı
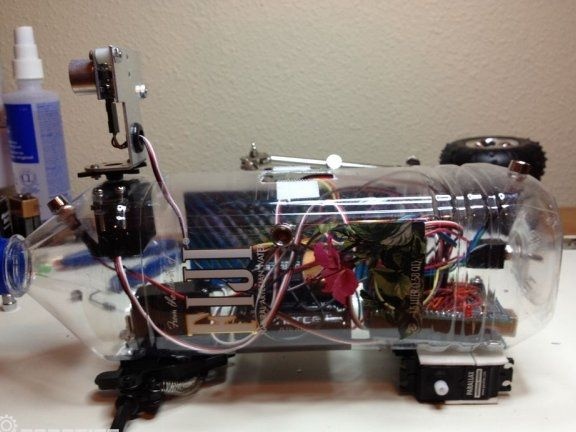
Şasinin üretimi için kontrol panelinde bir bebek arabası gerekir. Sökülmesi gerekir, sadece fotoğrafta görünen öğeleri bırakır. Ön aksın bir servo motor kullanılarak döndürülmesi gerekecektir.
Her iki eleman (ön ve arka aks) plastik bir şişeye monte edilir, bunun için boyut için gerekli delikler içinde kesilir. Şimdi, her şeyi sadece fotoğraftaki gibi bağlamak kalıyor.





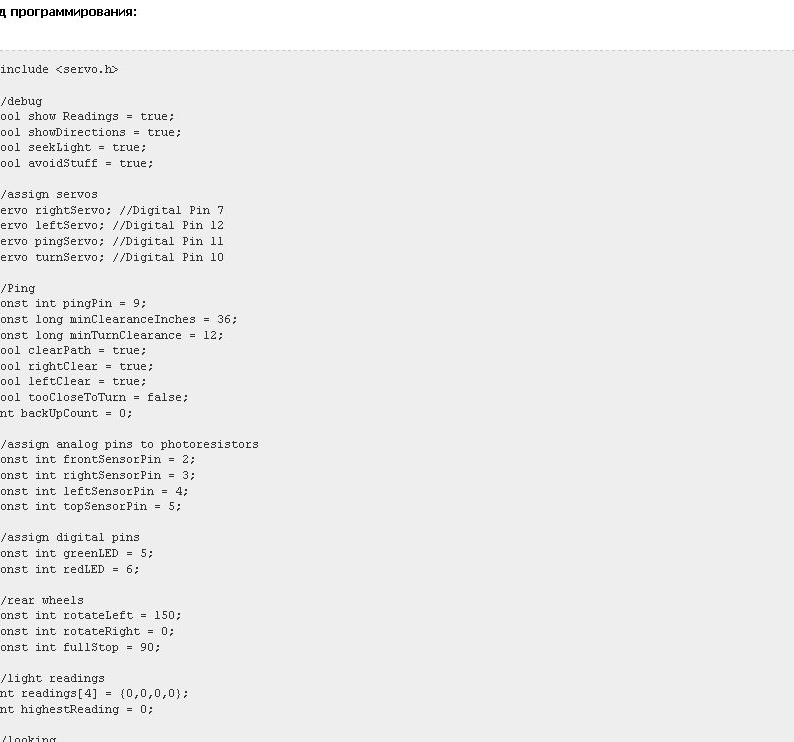
Dördüncü Adım Programlama süreci
Robot kodunun gerçekleştirmesi gereken ana görev, ışık kaynağını aramak ve ondan şarj etmektir. Işık kaynağını aramak için dört fotoğraf direnci kullanılır. Program döngüsü ışığın daha parlak olduğu yeri karşılaştırmalı ve ardından robot ona gitmelidir.
Robotun çökmesini önlemek için, başka bir döngü her 30 inçte bir engel olup olmadığını kontrol etmelidir. Bu bilgiyi elde etmek için bir ultrasonik sensör kullanılır. Robot bir engel tespit ederse durmalı, etrafına bakmalı ve en iyi yolu seçmelidir.
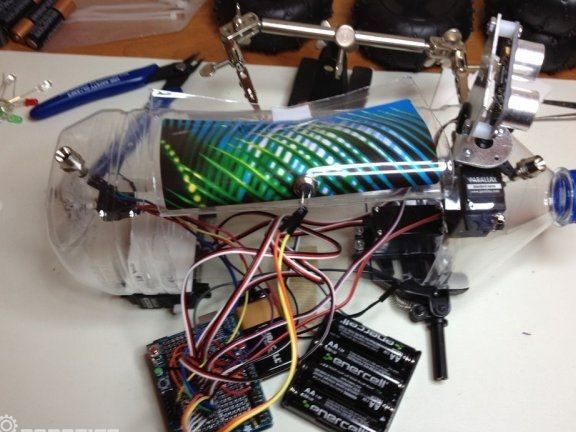
Beşinci Adım Montajın son aşaması
Robot programlandıktan sonra, sonunda monte edilebilir ve test edilebilir. Robotu test etmek için, odada farklı parlaklıklarda birkaç ışık kaynağı oluşturmanız ve onlara hareket etmede engeller oluşturmanız gerekir. Robot, engellere çarpmadan en parlak ışık kaynağına ulaşmalıdır.





Tabii ki, robotu geliştirmek için daha birçok seçenek var. Ona çok çeşitli işlevler ekleyebilirsiniz, burada her şey ustanın arzusuna ve hayal gücüne bağlıdır.