
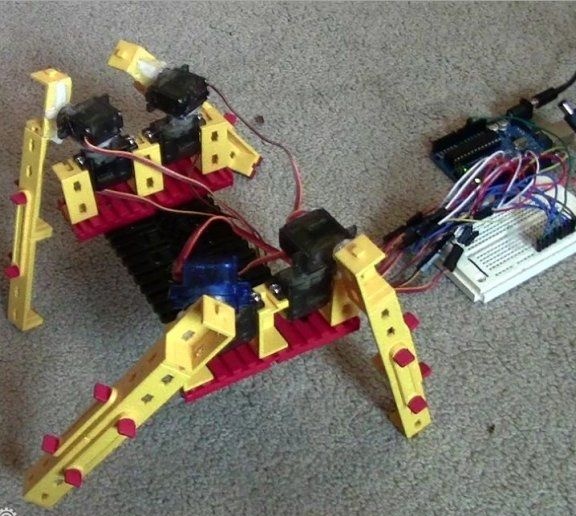
Robotik alanındaki becerilerini test etmeye karar verenler ve aynı zamanda Ardunio platformunun yeteneklerini keşfetmek isteyenler için, bu makalede anlatılacak olan örümcek robotu monte ederek bunu yapmanın harika bir yolu var. Nedeniyle ana güç unsurları olarak robot hareket edecek servolar. Beyin gelince, burada ArduinoFischertechnik gibi. Yazara göre, robotun oldukça ilginç ve umut verici olduğu ortaya çıktı.
Üretim için malzeme ve araçlar:
- bıçak seti;
- sıcak tutkal;
- Dremel (çok ince matkaplara ihtiyaç duyar);
- tornavida;
- matkapla 7/32 matkap;
- Yıldız tornavida;
- bıçak;
- aküler için bölme;
- breadboard.
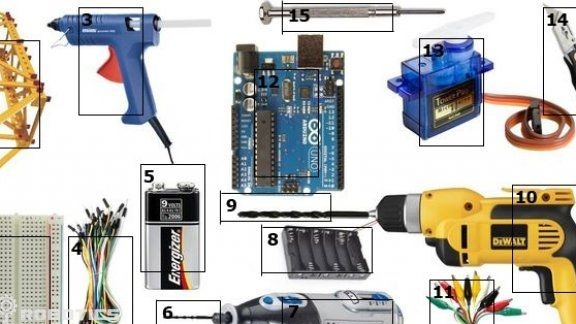
Elektronikten ihtiyacınız olacak:
- braketli sekiz mikro hizmet;
- 6 adet AA pil ve mandal;
- bir sürü jumper ve konektör.
Yazılım parçası olarak, güç kaynağı olan bir Arduino'ya ihtiyacınız olacak.
Ve parçalar bir Fischertechnik kitine ihtiyaç duyar.
Robotun üretim süreci. :
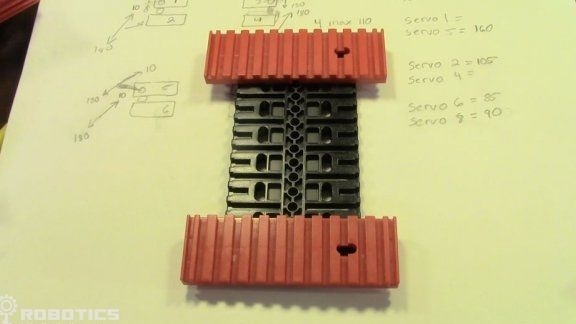
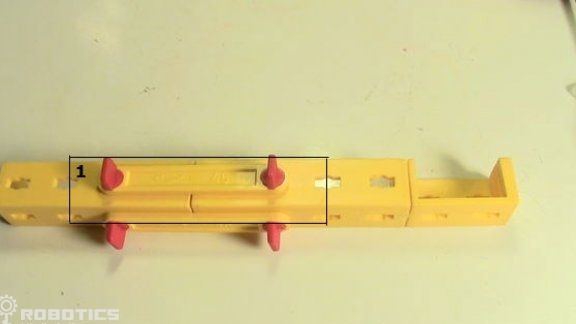
İlk adım. Robot çerçevesi oluşturma
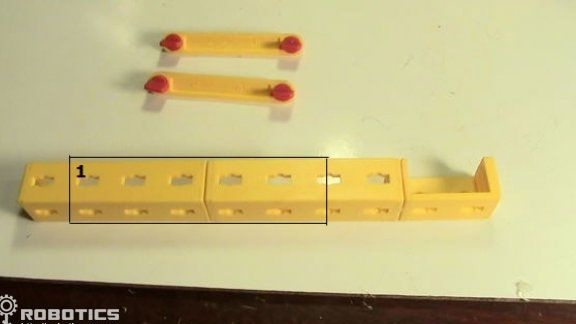
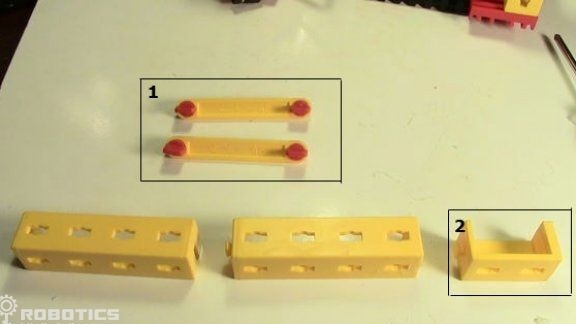
Çerçeveyi yapmak için bir Fischertechnik kitine ihtiyacınız var. Nasıl görünmesi gerektiği fotoğrafta görülebilir. Bir çerçeve oluşturmak için üç uzun "tuğla" gereklidir, aralarında dört delik olmalıdır. Özellikle bu ev yapımı ürün 11 kesimli bir eleman kullanılacaktır. Tüm servoların çalışır durumda olduğundan emin olmak önemlidir.
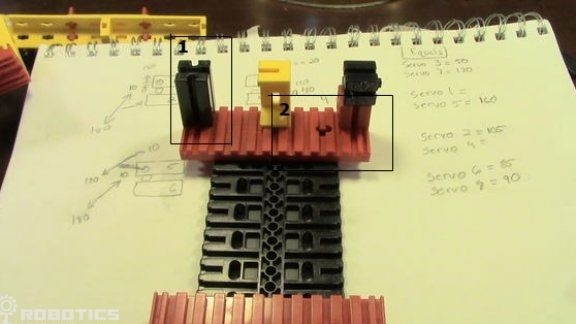
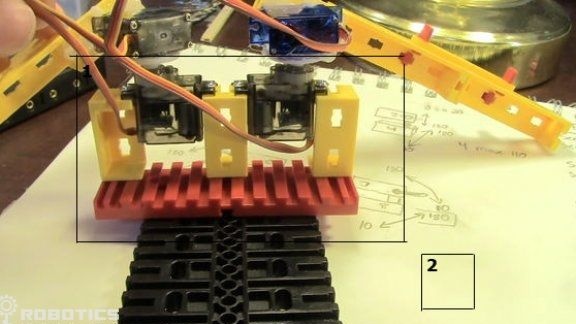
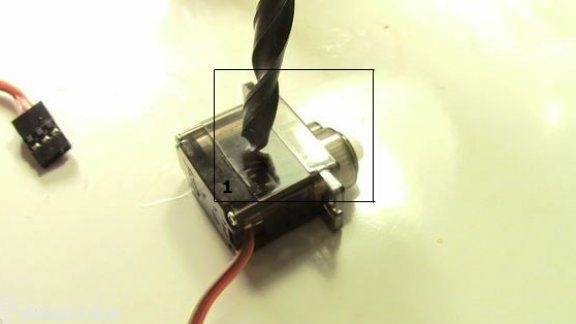
İkinci Adım Servoları takın
Servolar "tuğlalar" arasına yerleştirilecektir. Servolar vidalarla sabitlenir, bu amaçla önce bağlantı noktalarına bir dremel kullanılarak delikler açılmalıdır. En küçük çaptaki delikleri delin. Bununla birlikte, sıcak tutkal da bu amaçlar için uygundur, ancak bu durumda tasarım ayrılmaz olacaktır.
İkinci servo ters çevrilmiş diğer tarafa monte edilir.
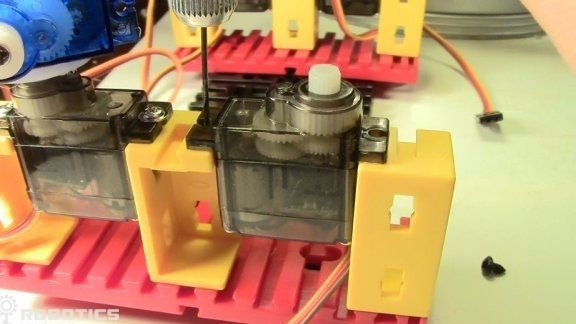



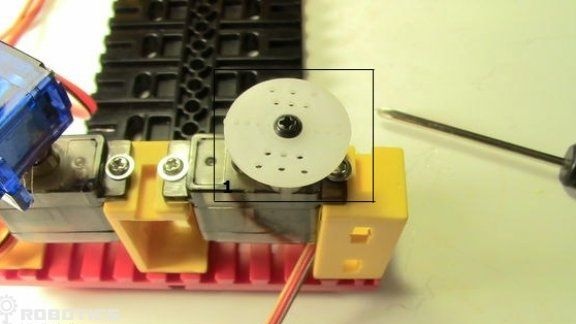
Üçüncü Adım Bir servo motorun diğerine takılması
Her şeyden önce, servoların montaj elemanlarıyla uğraşmanız gerekir. Motor ters yönde dönüyorsa, tamamen sağa çevrilmelidir.Bunun nasıl yapılacağı fotoğrafta görülebilir.
Özellikle, bu durumda, servo vida plastiğin üzerine çıkıntı yapmalıdır, böylece hareket edebilir. İkinci servonun gövdesinde, vida başının altında bir girinti yapmanız gerekir.
ne
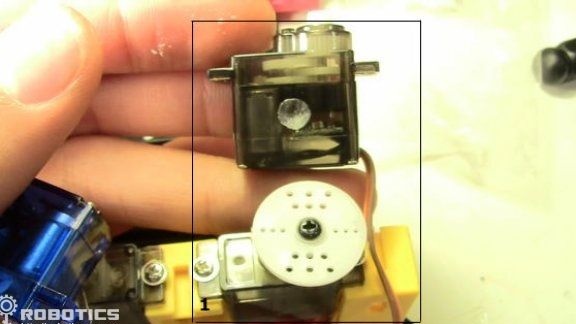
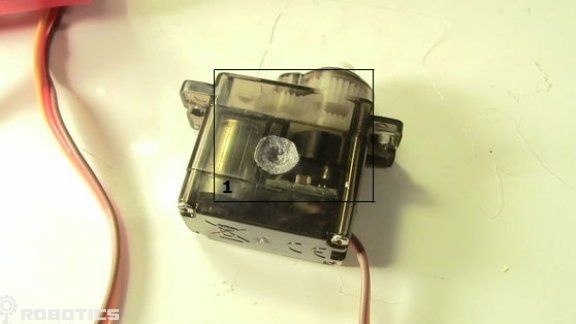
İki servoyu bağlamak için sıcak tutkal kullanılır.
Dördüncü Adım Bacakları bağlayın
Bacaklar nasıl yapılır, fotoğrafta görülebilir. Dört tane olmalı.
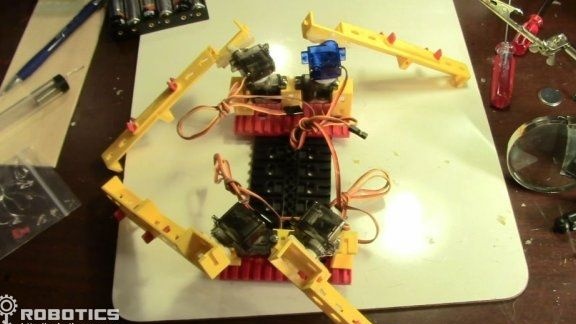
Bacaklar monte edildikten ve robota bağlandıktan sonra, tasarım fotoğraftaki gibi görünmelidir.
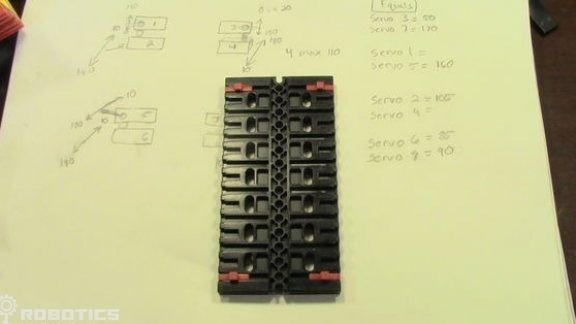
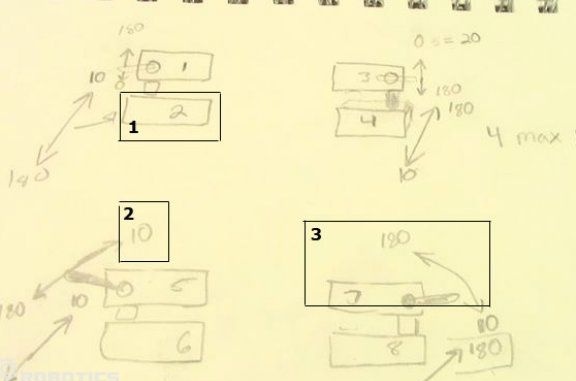
Beşinci Adım Bir ilişki için grafik oluşturma
Şema, her bir servonun hangi açıyı döndürebildiğini anlamak için gereklidir. Daha sonra, her bir servo sürücüye belirli bir sayı atanır ve bu sayı temelinde robot için ürün yazılımı oluşturulur.
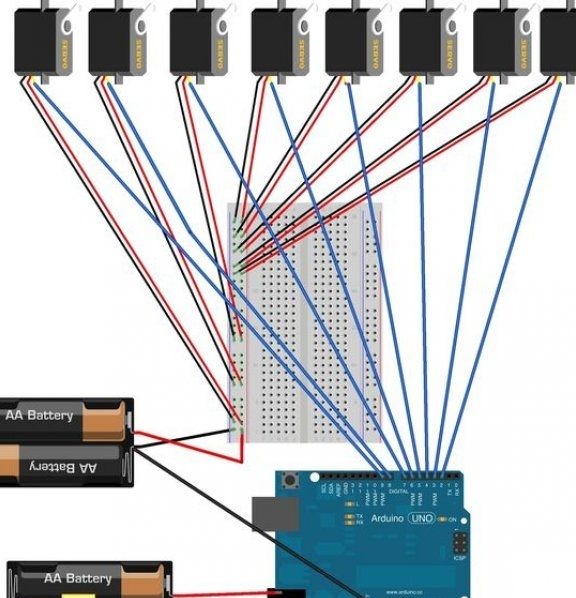
Altıncı Adım Prototip tahtası
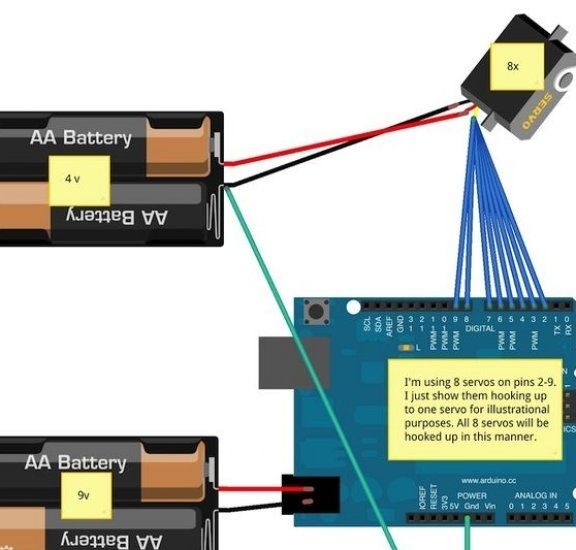
30 jumper'ı da çıkarmalısın. Daha sonra, her şeyin şemada gösterildiği gibi tellerle bağlanması gerekir. Her servo sürücünün üç kontağı vardır, biri topraklamadan sorumludur, güç birinden sağlanır ve diğeri motoru kontrol etmek için gereklidir.
Vcc ve GND servo pimleri Vcc ve GND yerleşim pimlerine bağlanmalıdır. Ayrıca, GND ve Vcc yerleşim kanallarına 7.5V güç kaynağı bağlanır.
Servo kontrol telleri turuncu ve sarıya boyanmıştır. Örneğin, 2. ve 9. pimlere bağlanırlar. Örneğin, ilk motordan bir kontak Arduino'daki ikinci pime bağlanır. İkinci motor zaten üçüncü kontağa bağlıdır ve bu şekilde devam eder.
Yedinci adım. Servoları kurun.
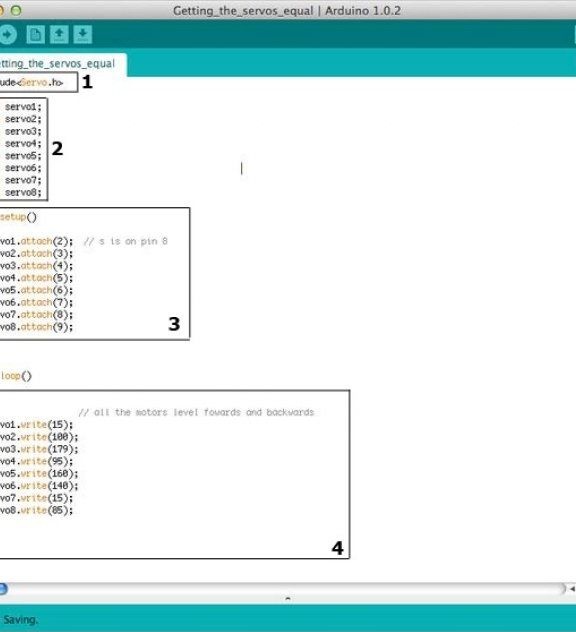
Şimdi robot için program kodu oluşturma zamanı. Her şeyden önce, Arduino'da motorları senkronize etmek için yeni bir proje oluşturmanız gerekir. Kodun nasıl görünmesi gerektiği fotoğrafta görülebilir. Bu kod sayesinde robotun bacakları hizalanır.
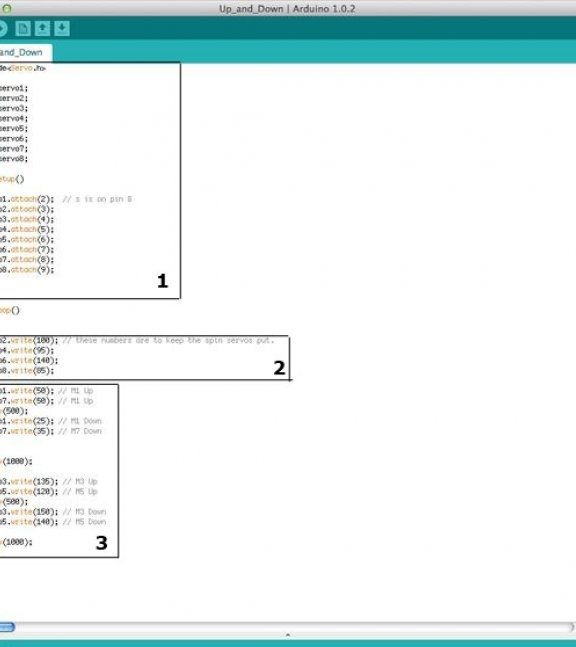
Örümceğin yükselmesi için Yukarı ve Aşağı adlı başka bir proje oluşturmanız gerekir. Bu kod sayesinde, örümceğin bacakları yukarı ve aşağı hareket edebilecektir.
Robotun ileri ve geri hareket edebilmesi için başka bir proje oluşturmanız gerekir. Nasıl görüneceği fotoğrafta görülebilir.
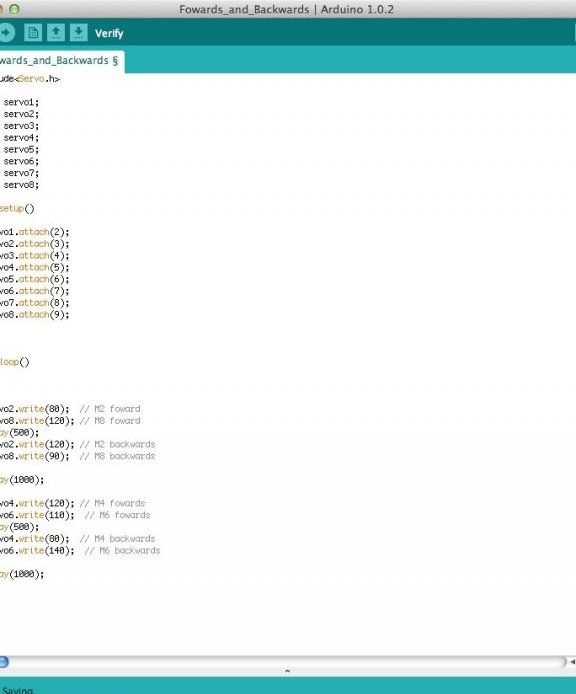
Ve son olarak, robotun gitmesi için ön ve arka kısımları birleştirmeniz gerekir. Belirtildiği gibi, robotun program kodu dört bloktan oluşur.
Hepsi bu, robot hazır. Şimdi, robotun uzayda gezinmesine izin verecek çeşitli sensörler kurmak mümkündür. Ayrıca, robotun nesneleri alabilmesi için ellerini yapabilirsiniz. Genel olarak, hepsi robot üreticisinin coşkusuna ve hayal gücüne bağlıdır. Bununla birlikte, bu formda bile, robot oldukça ilginç davranır.
Firmware: