

Çoğu zaman forumlarda küçük bir robotun nasıl yapılacağı hakkında sorular var kendin yap doğaçlama malzemelerden. Birisi mini robotlar oluşturmadaki güçlü yönlerini ve becerilerini test etmek istiyor ve birisi sadece arkadaşlarını veya çocuklarını şaşırtmak istiyor. Aslında, her şey oldukça basit, sadece biraz sabır ve yaratıcılık göstermeniz gerekiyor.
Aşağıdaki videoyu dikkatinize sunuyoruz:
Küçük bir böcek robotu oluşturmak için ihtiyacınız olacak:
- bahçe lambası (güneş pili);
- iki kondansatör;
- motor;
- transistör VD135;
- transistör A733P;
- LED;
- direnç;
- havya;
- bakır teller;
- bir bıçak;
- sıcak tutkal;
- ataç.
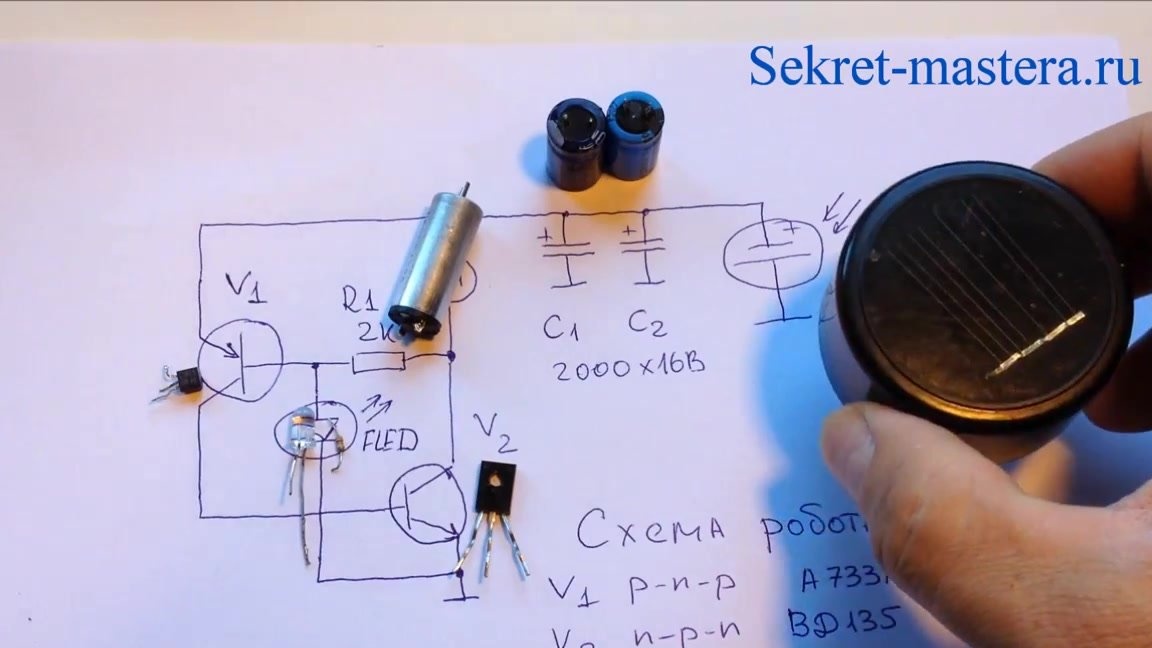
Her kapasitörün kapasitansı, 16V voltaj için derecelendirilmiş 2000 μF'dir.
Motor eski bir diş fırçasından kullanılabilir ve motoru eski bir film kamerasından da kullanabilirsiniz.
Güçlü bir transistör (bir orta güç transistörü ile değiştirilmesine izin verilir), bir n-p-n yapısı, bu durumda VD135'i kullanır.
Bu durumda p-n-p yapısının ikinci transistörü A733P'yi kullanacaktır.
Düzenli aralıklarla yanıp sönen LED yanıp söner.
2 kΩ direnç.

Gerekli tüm radyo elemanları hazırlandıktan sonra işe koyuluruz.
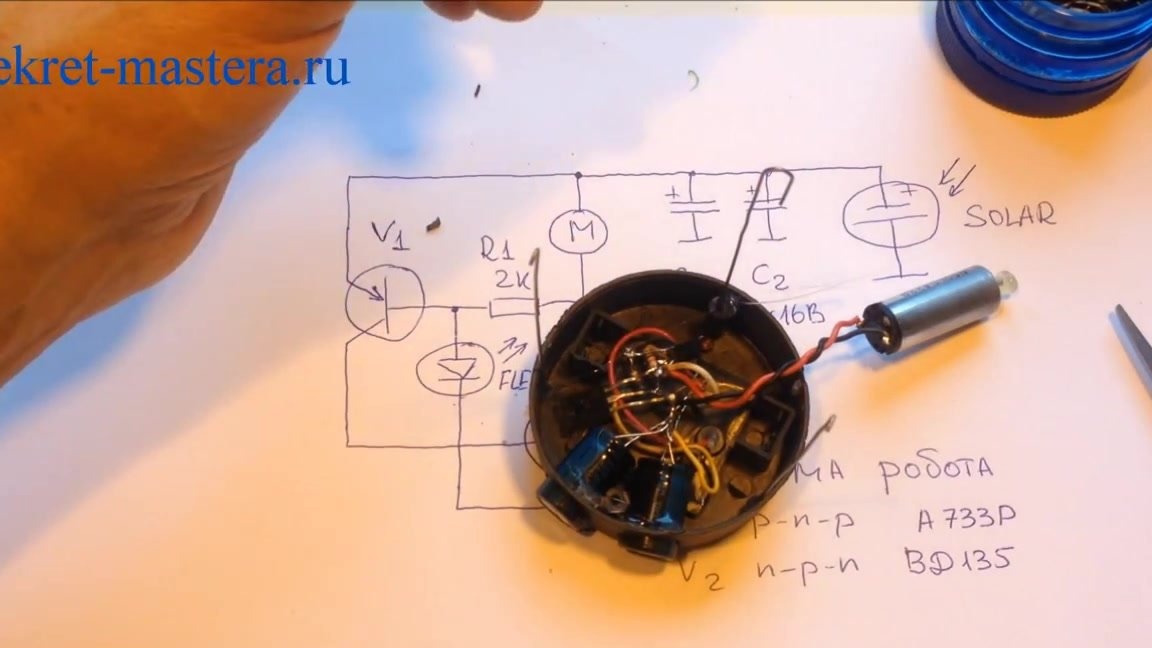
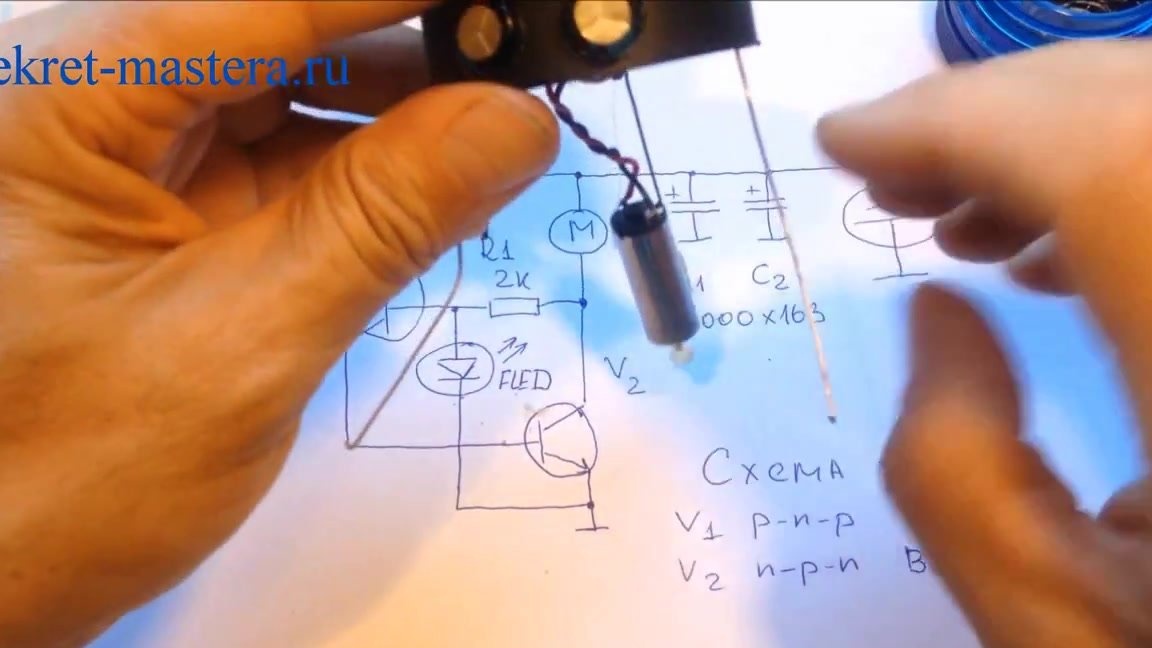
Çalışma prensibi:
Solar aküden gelen enerji iki kapasitörde depolanır ve belirli bir frekansta motora güçlü bir anahtar transistör yoluyla güç sağlayan LED etkinleştirilir. Bu durumda, motor kapasitörü deşarj eder ve bazı dönme hareketleri gerçekleştirir.
montaj:
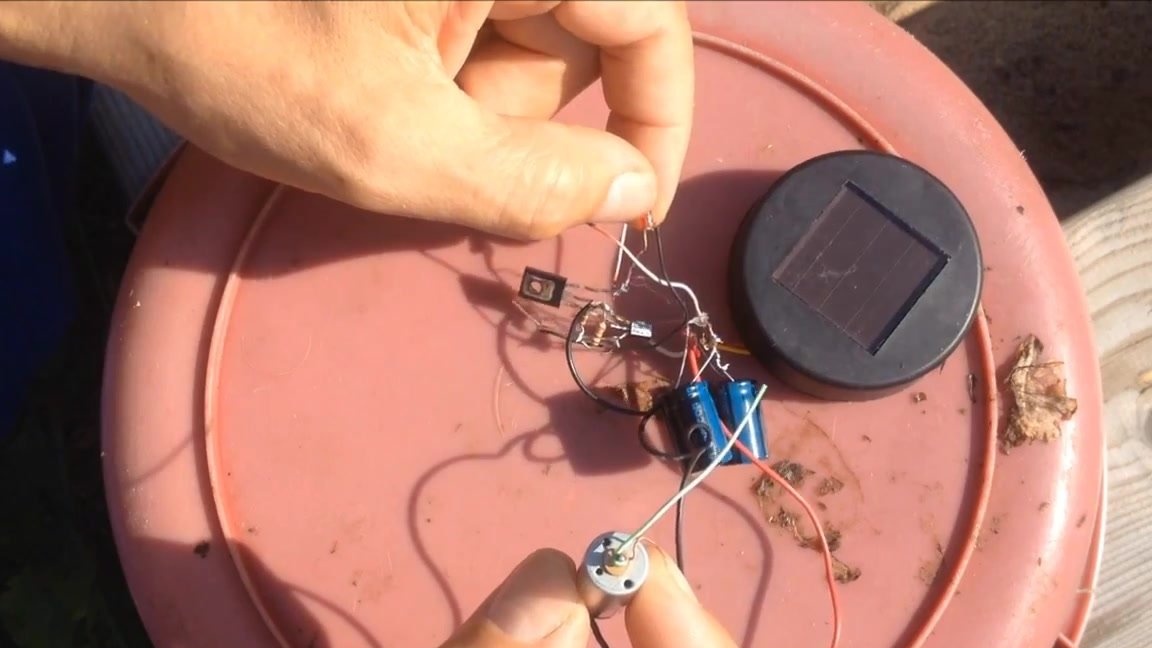
Güneş pili durumunda, bıçakla iki delik yaparız ve kapasitörleri içine yerleştiririz - bunlar böceğimizin gözleri olacaktır. Sıcak eriyik yapıştırıcı ile sabitliyoruz.
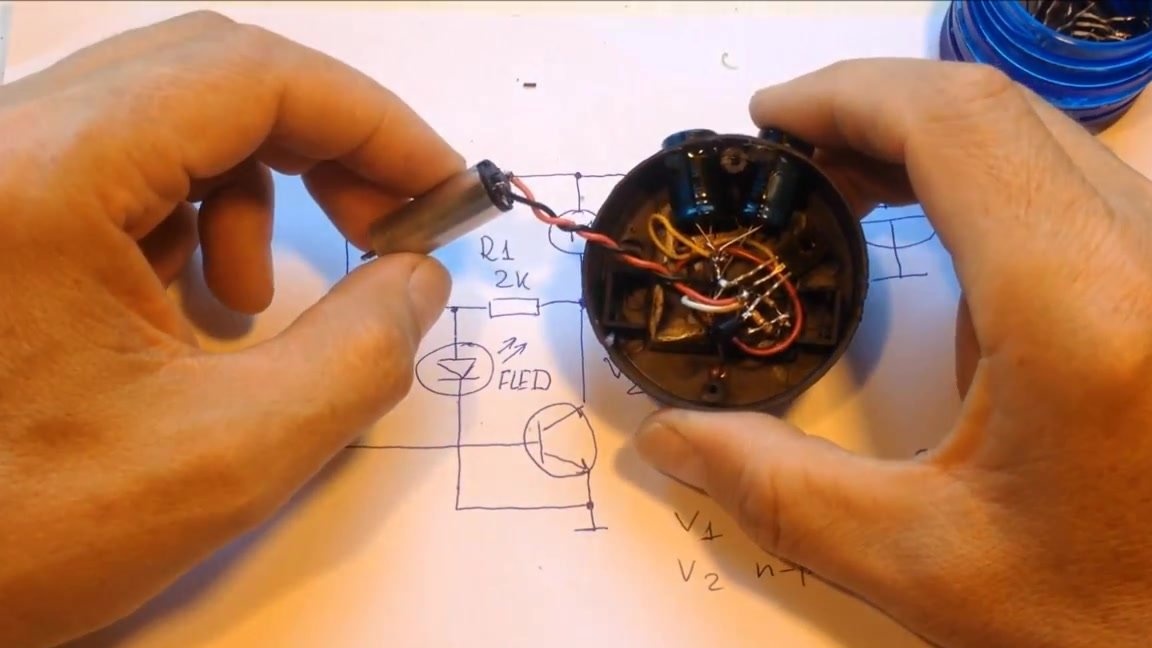
Ardından, bir havya ve teller kullanarak, tüm radyo elemanlarını şemaya göre toplarız.
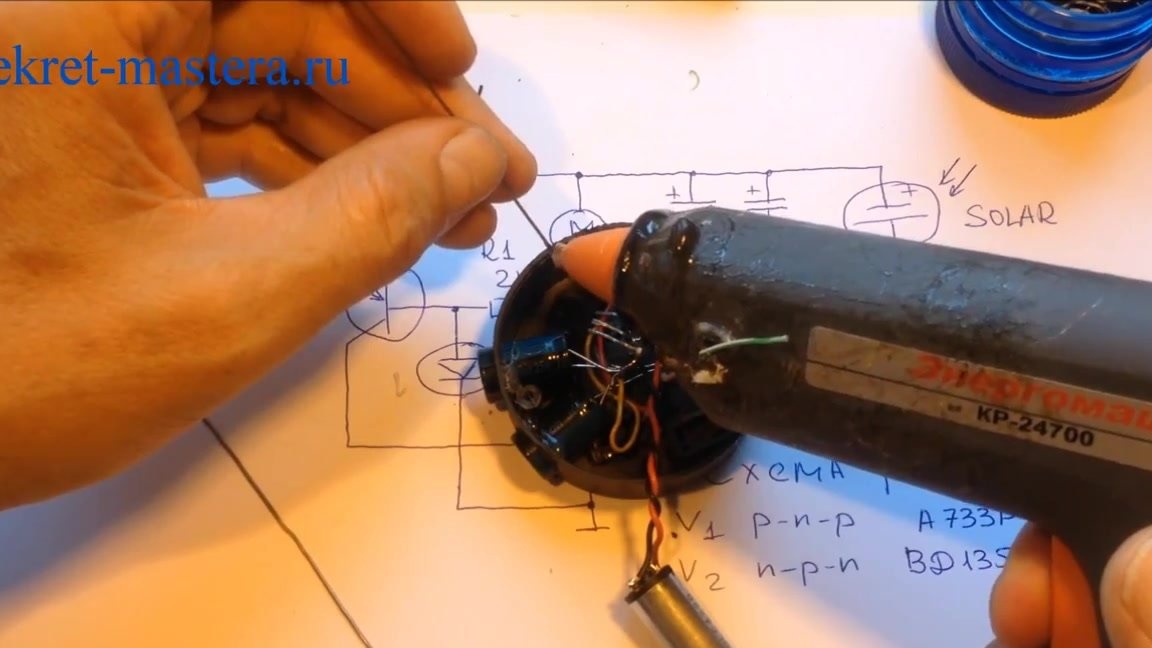
Tüm elemanlar güneş pili kasasının içine sabitlenmiştir, uzun bir tel üzerinde sadece motoru terk ediyoruz ve tamir etmiyoruz.
Motor ekseninin ucuna büyük bir tutkal damlası uygulanır, uçta küçük bir top oluşturmak için birkaç kez bile yapabilirsiniz.
Böceğimizin bacaklarını sıradan ataçlardan yapacağız.Ataş, yalnızca küçük ucu bükülmeden düzeltin ve sıcakta eriyen yapıştırıcı ile vücuda sabitleyin. Toplamda üç bacağımız olacak.
Motorumuzu bacaklardan birine takıyoruz, böylece robot sonunda oluşan bir topa yaslandı.
İsteğe bağlı olarak, bacaklara gerekli şekli verebilir, hafifçe bükebilir veya düzeltebilirsiniz.
