

Piyasada bir apartman dairesinde veya evde kilitli bir hayvanın durumunu takip edebileceğiniz birçok cihaz var. Bu cihazların dezavantajı durağanlıklarıdır. Tabii ki, örneğin, köpek aynı odadaysa, bu bir sorun değildir, ancak evin etrafında ve muhtemelen sitenin etrafında hareket ederse, durumunu izlemek için ev / daire / site boyunca kameralar ayarlamanız gerekir.
Kameralara asılmamak için Master bir akıllı telefon tarafından uzaktan kontrol edilen bir mobil cihaz yaptı.
Araçlar ve malzemeler:
-Arduino uno;
-Raspberry Pi;
-CNC Kalkanı;
- A4988 step motor sürücüsü - 4 adet;
-Pi kamera;
Ultrasonik mesafe sensörü;
-AKB 11.1V;
-Adım motoru NEMA 17-2 adet;
- Gerilim sabitleyici UBEC 5V;
-7 cm - 2 adet çapında tekerlekler;
- Silindirler -2 adet;
-Krepezh;
-Bilgisayarlı bilgisayar;
-3D yazıcı;
-Akril;
-Lazer kesici;


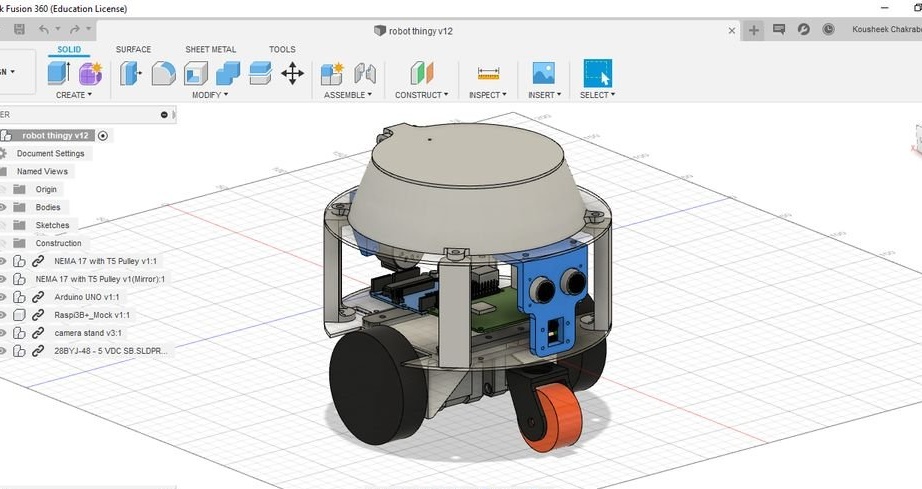
Birinci Adım: Proje
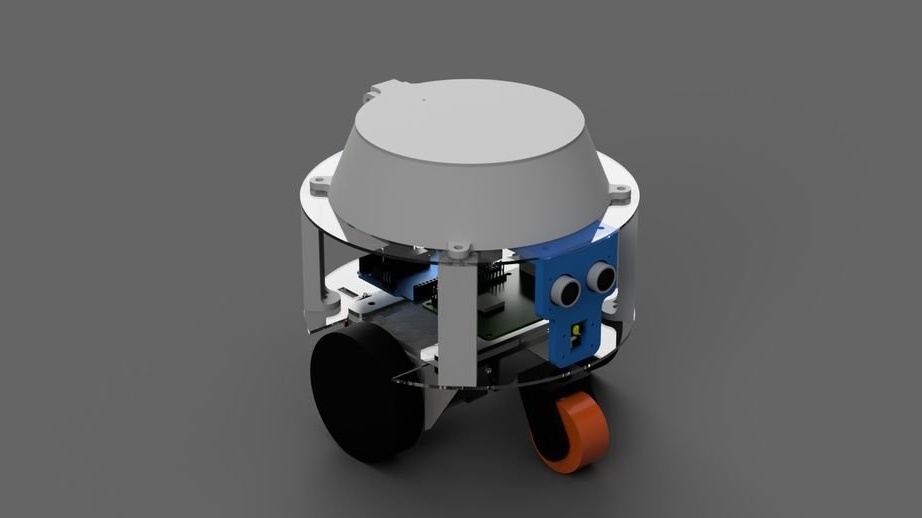
İlk başta cihaz Fusion 360 programında tasarlandı.Robot aşağıdaki özelliklere sahiptir:
-Internet üzerindeki uygulama ile kontrol edilebilir. Bu, kullanıcının robot dünyanın her yerinden.
Bir akıllı telefona video akışı sağlayan dahili bir kamera, kullanıcının evin etrafında manevra yapmasına ve evcil hayvanla etkileşime girmesine yardımcı olur.
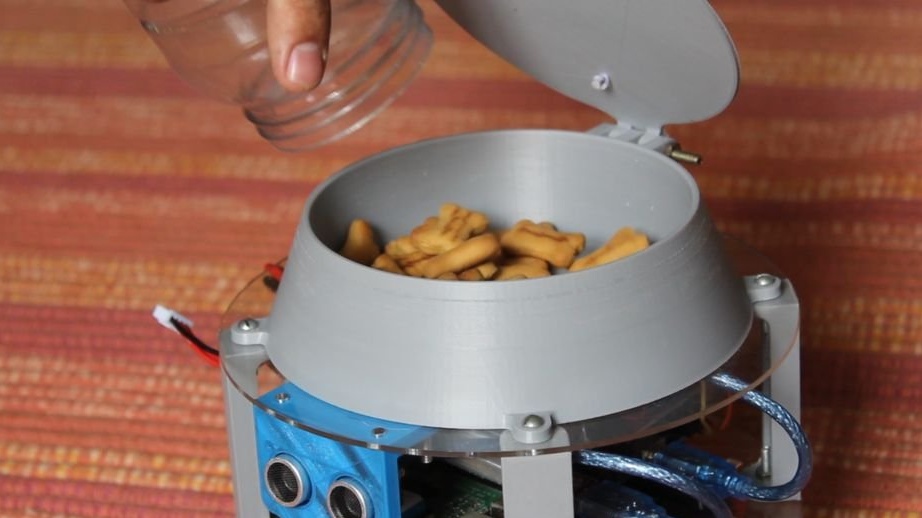
Evcil hayvanınıza bir tedavi verebileceğiniz, ikramlar için ek kase.
Raspberry Pi, dahili bir Wi-Fi modülüne sahip olduğu için İnternet'e bağlanmak için kullanılır.
Arduino, step motorlara kumanda etmek için kullanılır.
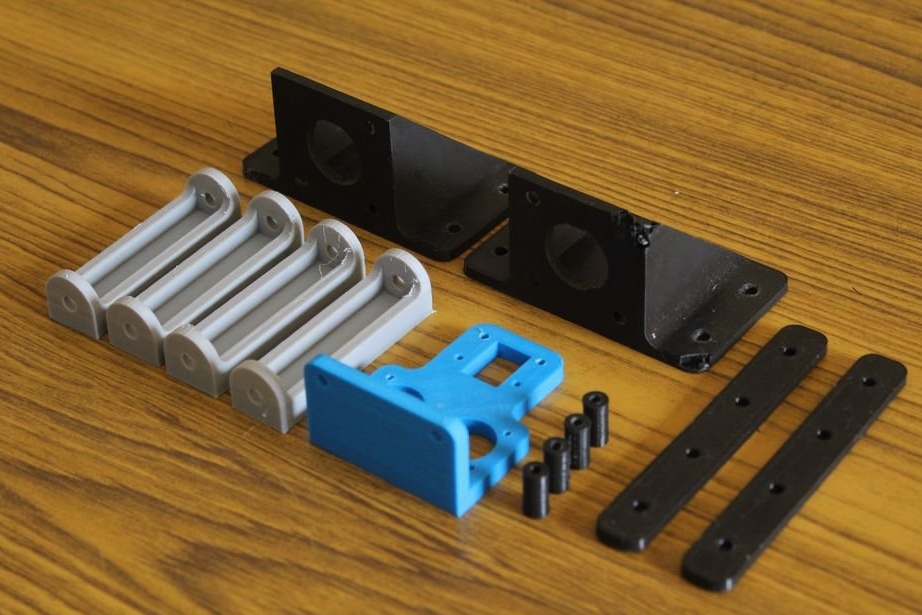
İkinci Adım: 3D Baskı, Lazer Kesim
Bu projede kullanılan bazı parçalar, usta atölyede sipariş verdi. İlk olarak Fusion 360'ta modellenmiş ve daha sonra bir 3D yazıcı ve bir lazer kesici kullanılarak yapılmıştır.
3D baskı parçaları:
Step Tutucu x 2 adet.
Görüş Sistemi Bağlantısı x 1 adet.
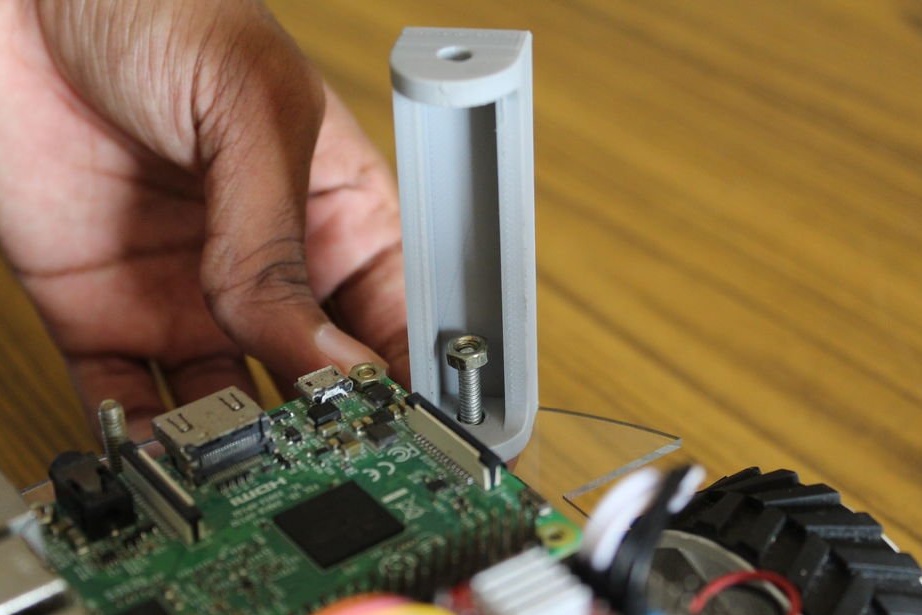
Elektronik Standoff x 4 Adet
Dikey Ara Parça x 4 Adet.
Şasi Takviyesi x 2 Adet.
Tedavi Kabı Kapağı x 1 Adet.
Tedavi Kasesi x 1 adet.
Arka Step Dağı x 1 adet.
Sargı Diski x 1 adet.
Lazer Kesim Parçaları
Alt Panel x 1 adet.
Üst Panel x 1 adet.
Lazer kesim için tüm STL dosyalarını ve dosyalarını içeren arşivlenmiş bir klasör aşağıdadır.
3dprints.rar
lasercutting.pdf
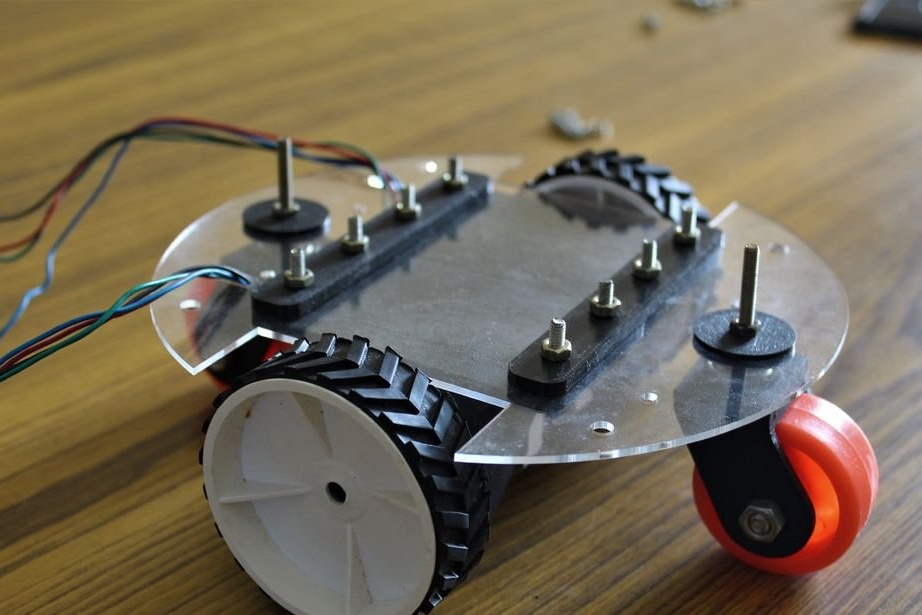
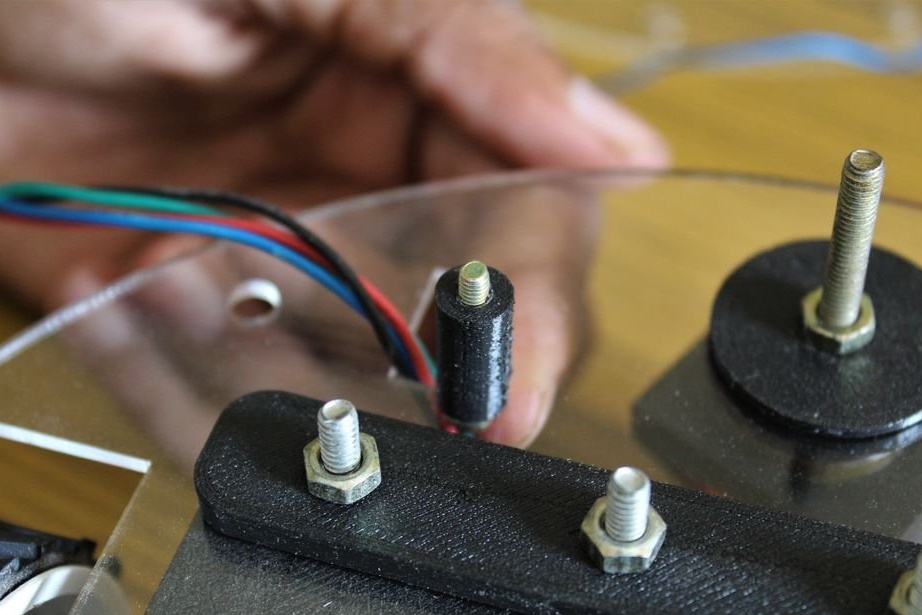
Üçüncü Adım: Platformu Oluşturun
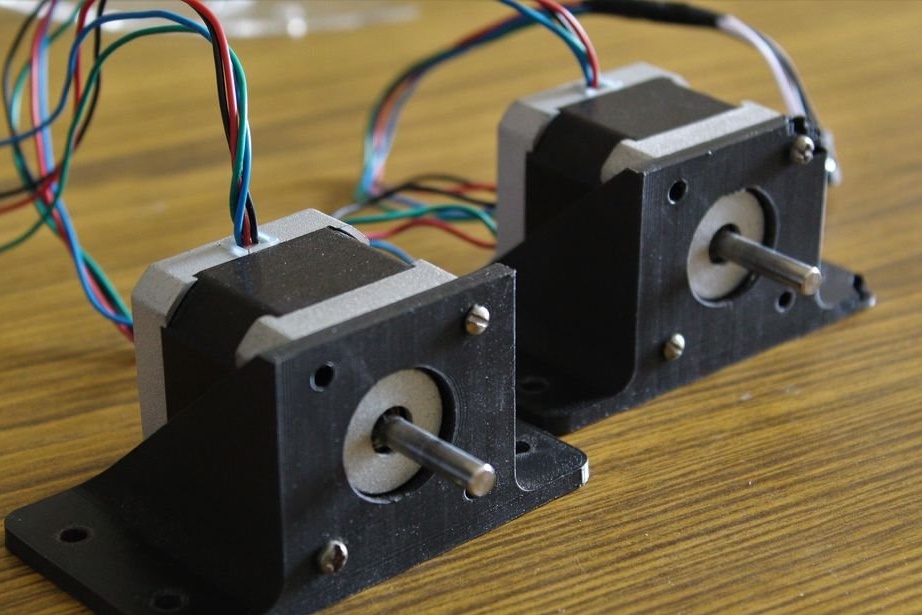
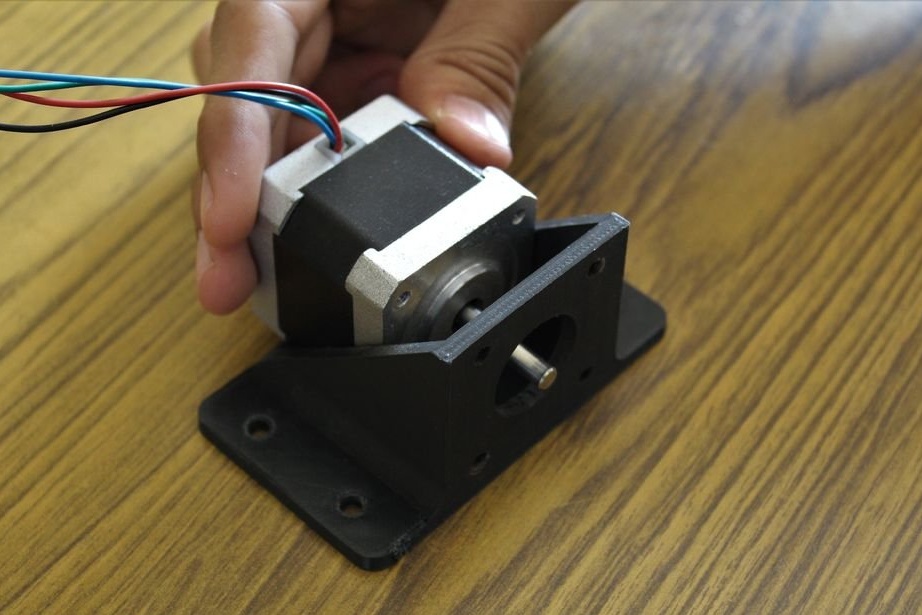
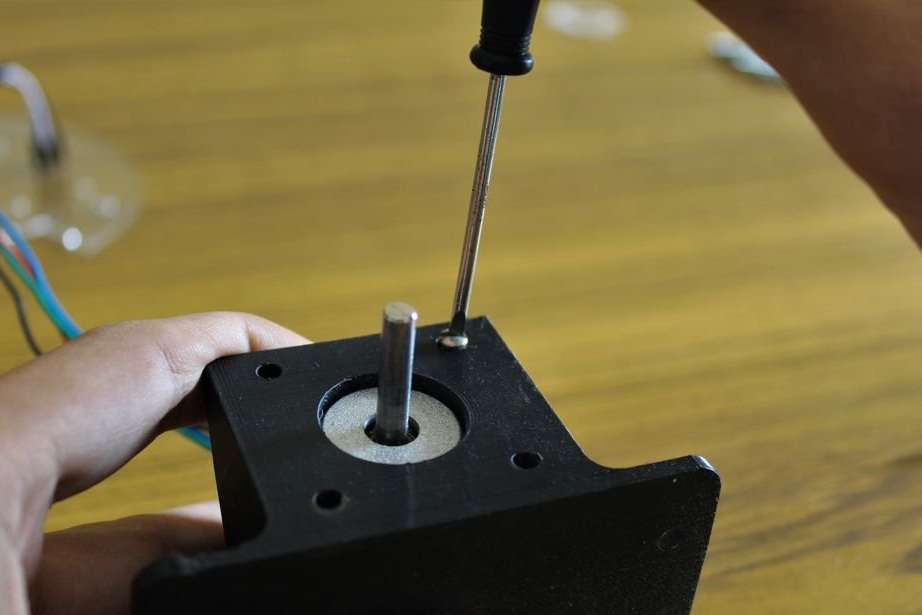
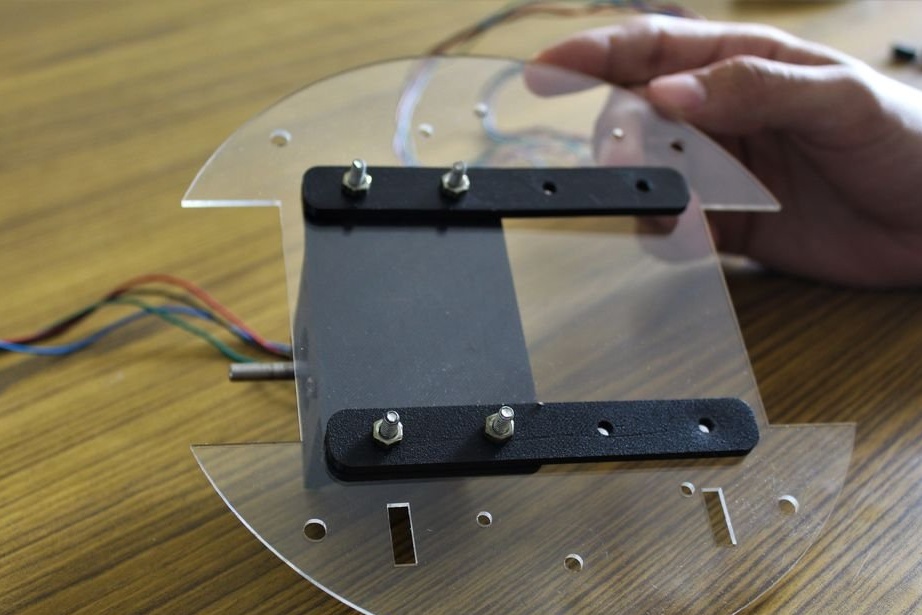
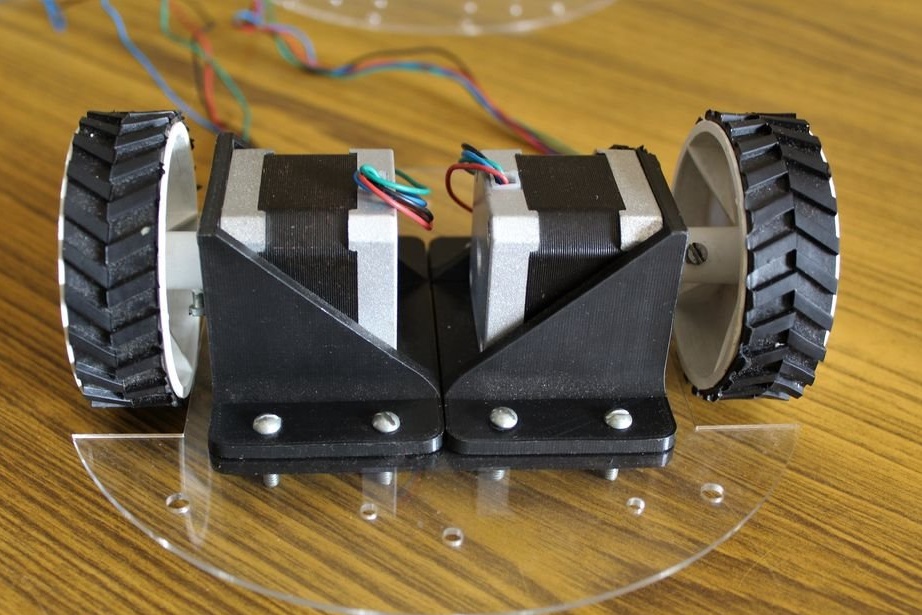
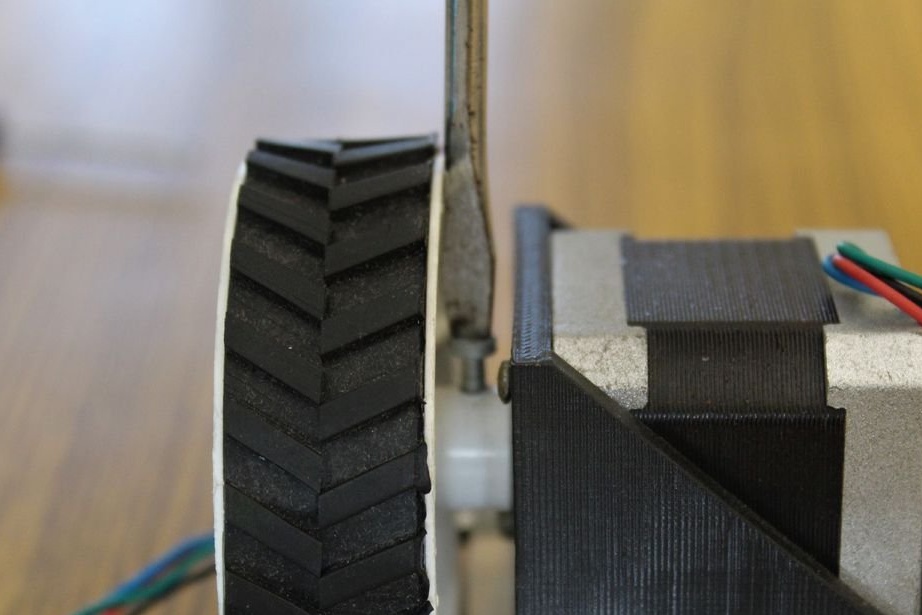
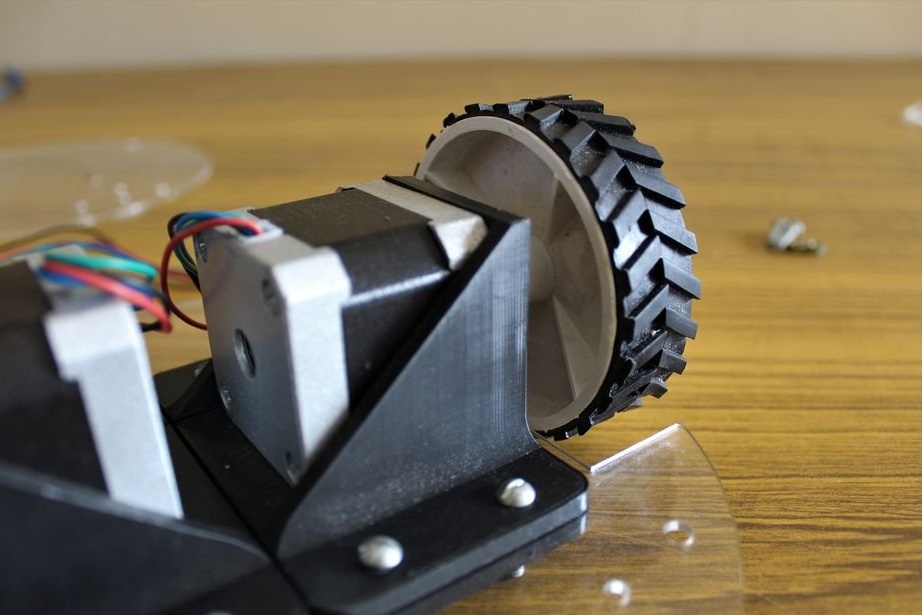
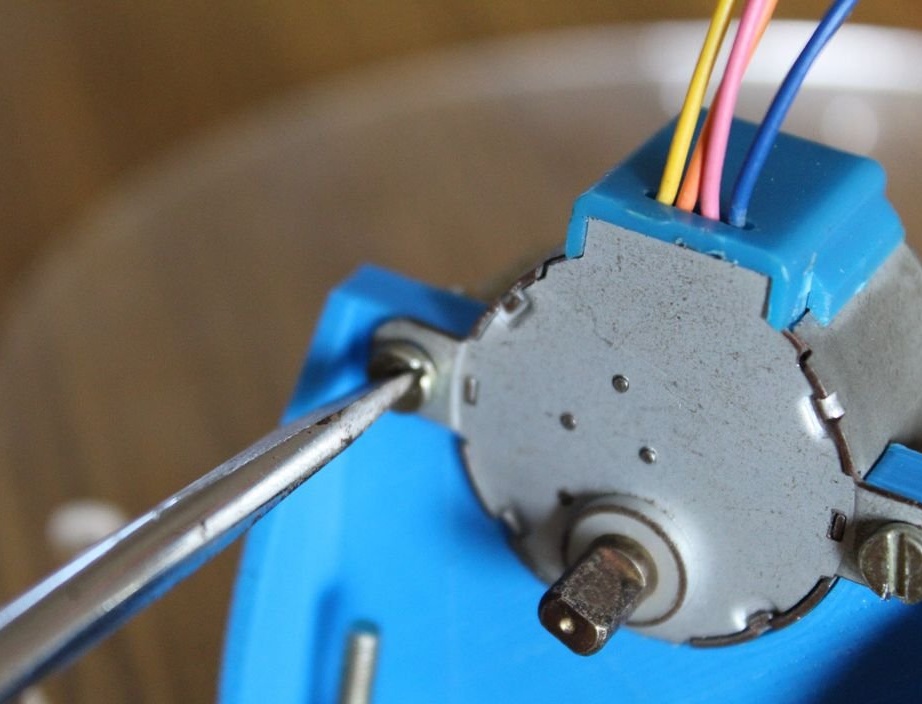
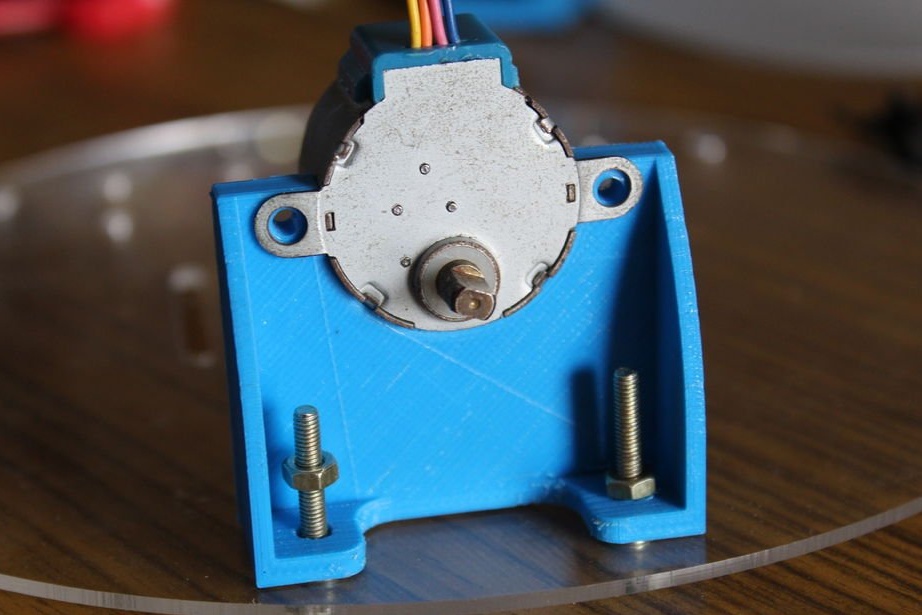
Tüm detaylar yazdırılır ve kesilir kesilmez, master montaj yapmaya başlar. Tasarlanan kademeli motor tutucusu NEMA 17 modeli için tasarlanmıştır Motor şaftını delikten geçirin ve motoru sabitleme vidalarıyla sabitleyin. Bundan sonra, her iki motor da tutuculara sıkıca sabitlenmelidir.
M4 cıvataları, alt lazerle kesilen panele tutucuları bağlamak için kullanılır.Onları somunlarla sabitlemeden önce, takviye şeritlerini güçlendirmek gerekir.
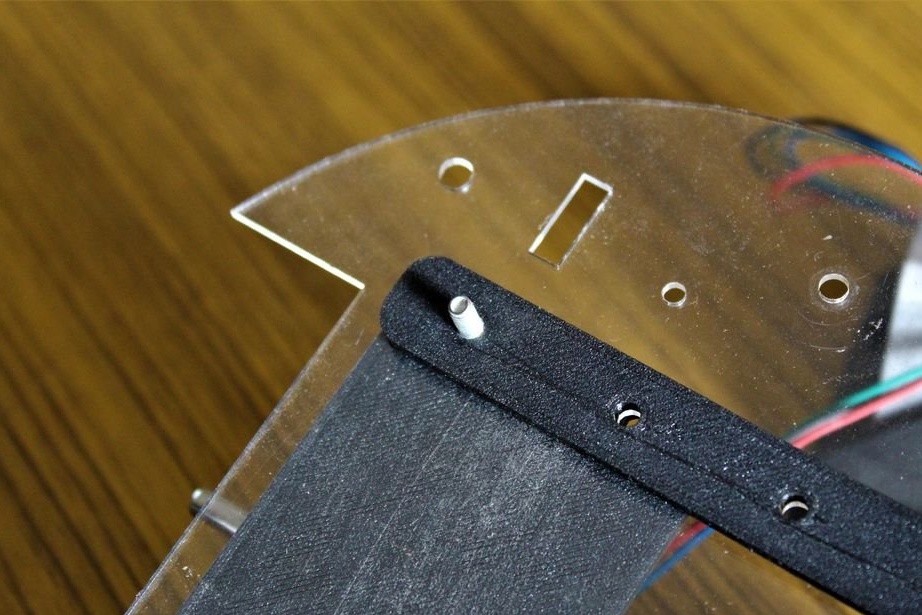
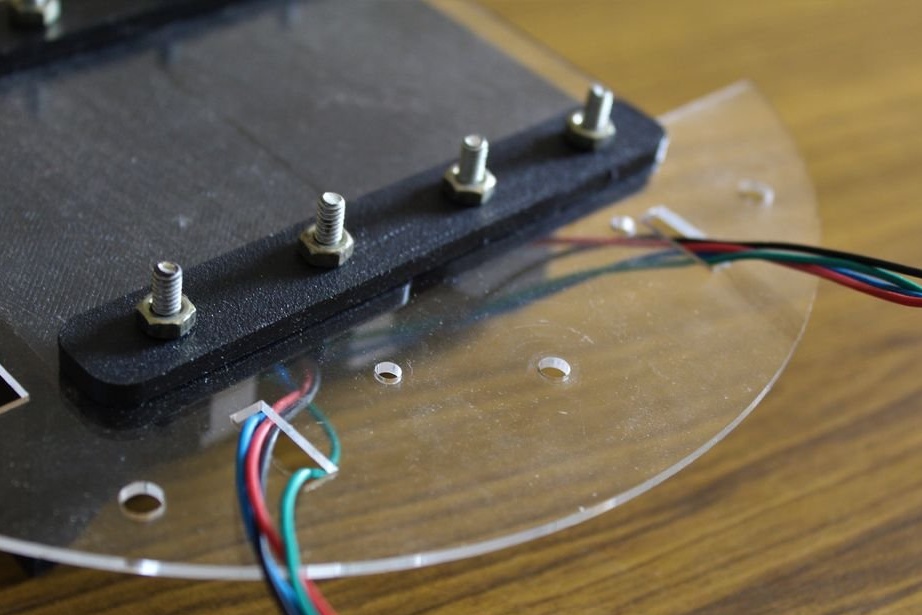
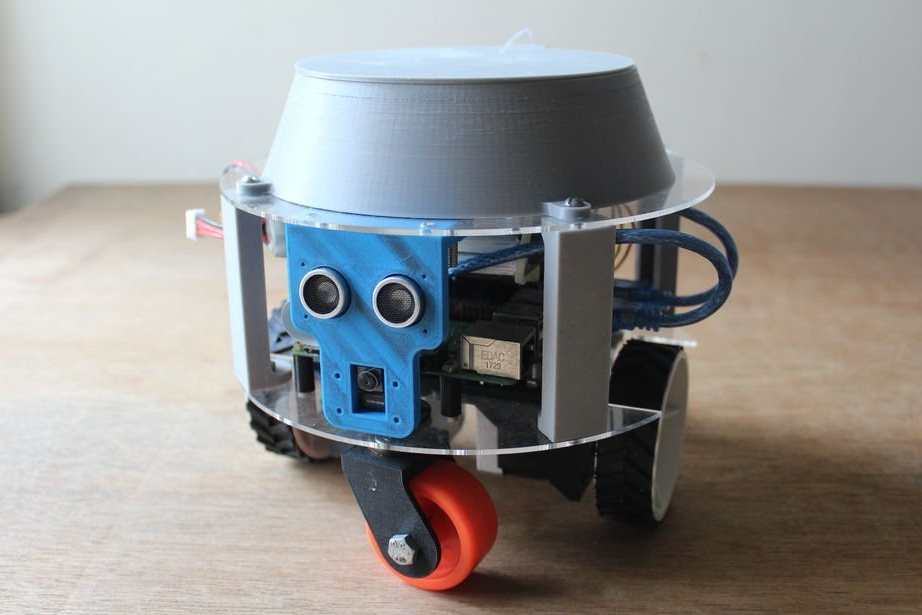
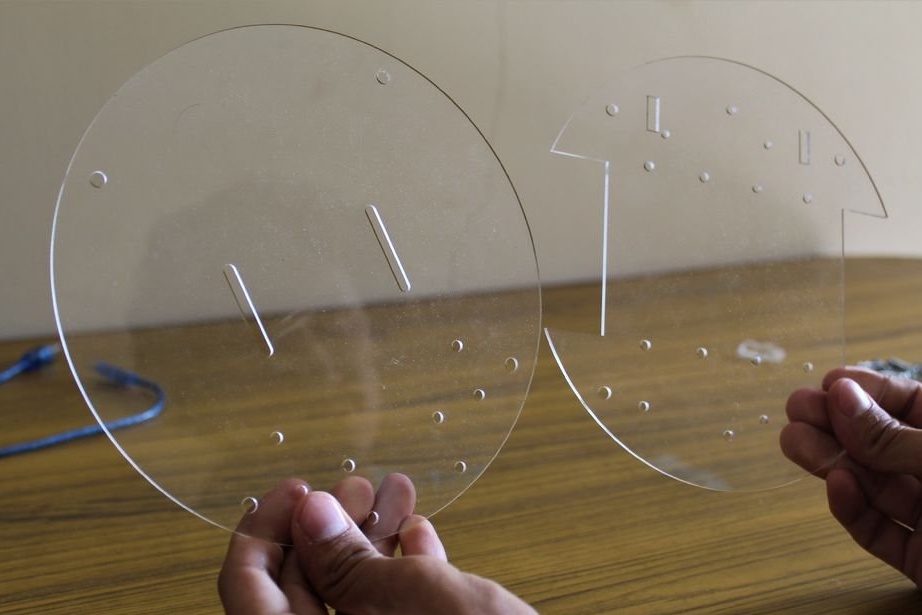
Akrilik panel, tekerleklerin altında kesilmiş iki bölüme sahiptir. Kullanılan tekerleklerin çapı 7 cm'dir ve 5 mm step şaftlara tutturulmuş ayar vidaları ile birlikte gelir. Tekerleklerin sıkıca sabitlendiğinden ve milin üzerinde dönmediğinden emin olun.
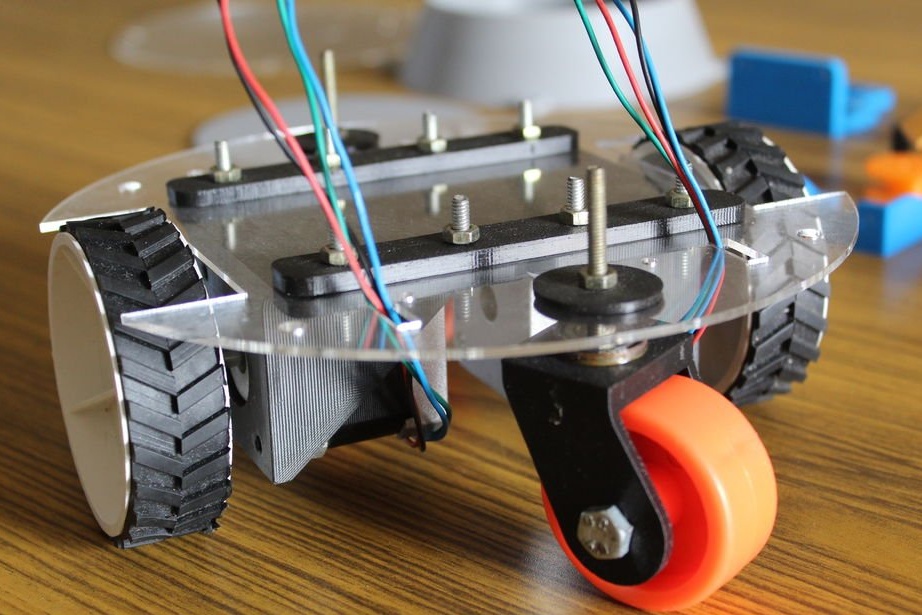
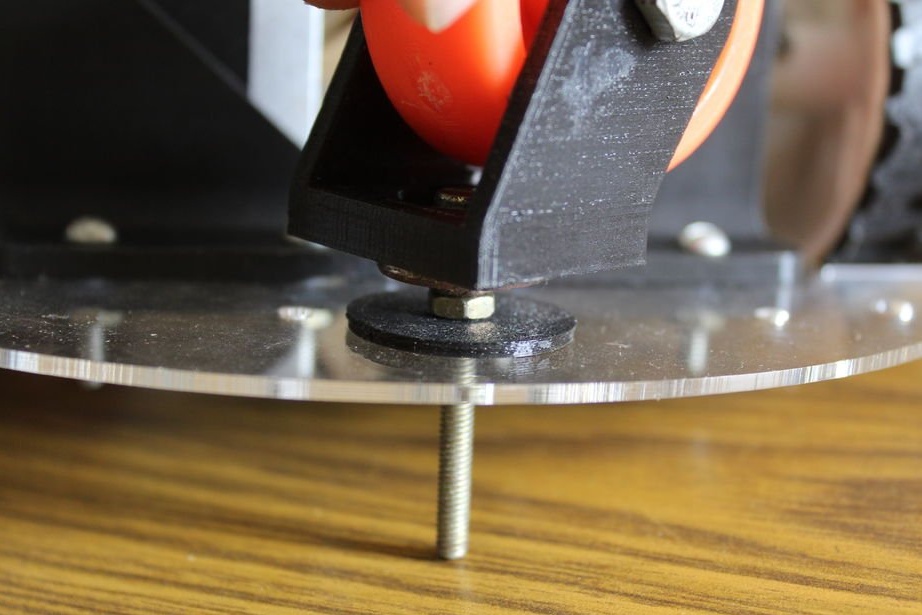
Şasinin düzgün hareket etmesini sağlamak için, silindirler cihazın önüne ve arkasına monte edilmiştir. Bu sadece robotun devrilmesini önlemekle kalmaz, aynı zamanda şasiyi herhangi bir yönde serbestçe döndürmenizi sağlar. Silindirler farklı boyutlarda gelir, özellikle bunlar tabana sabitlenmiş bir döner vida ile teslim edilir. Yüksekliği ayarlamak için, master ara parçaları kullandı.

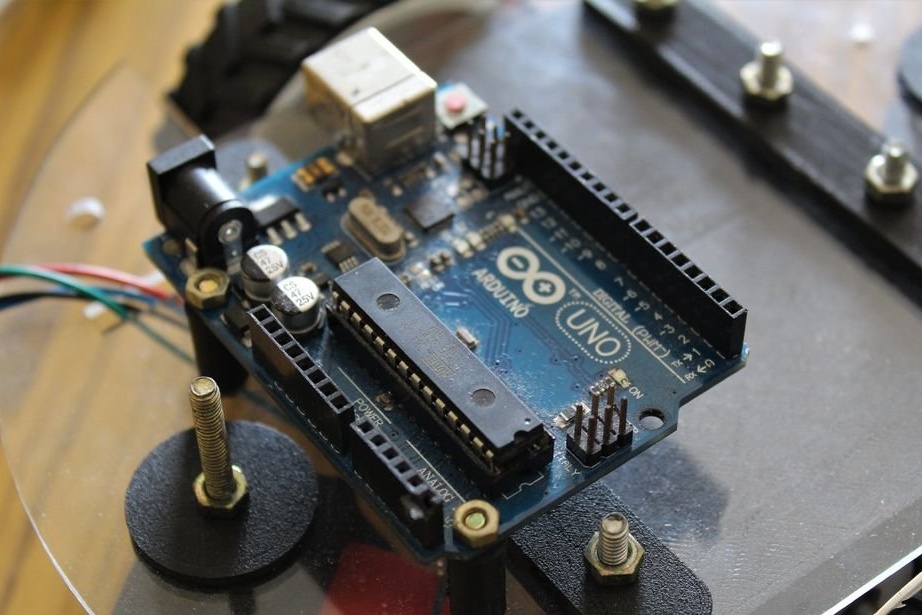
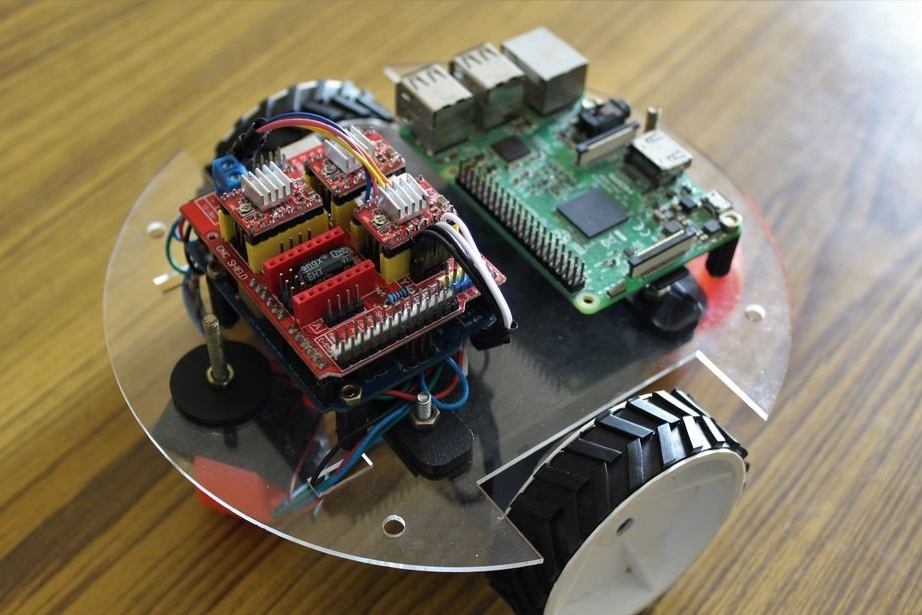
Dördüncü Adım: elektronik
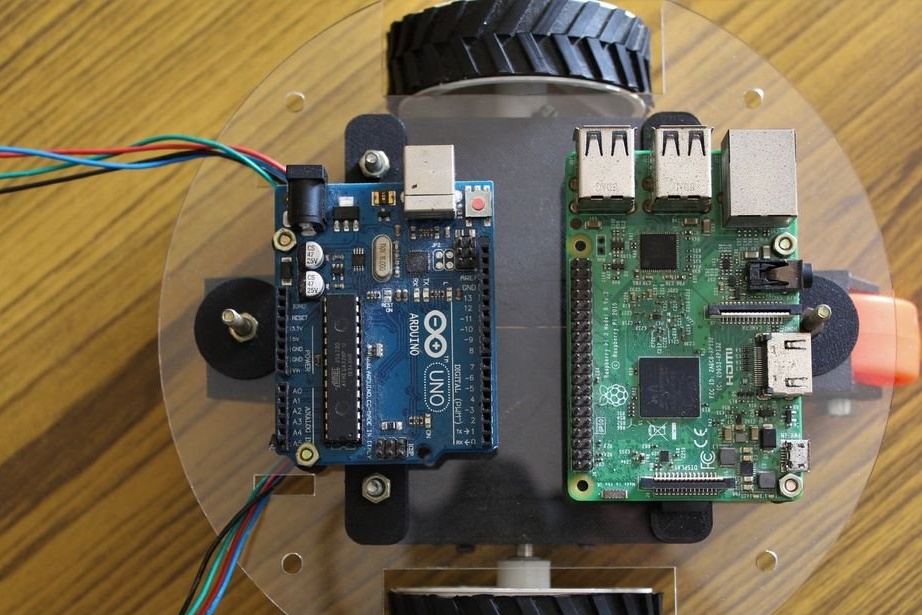
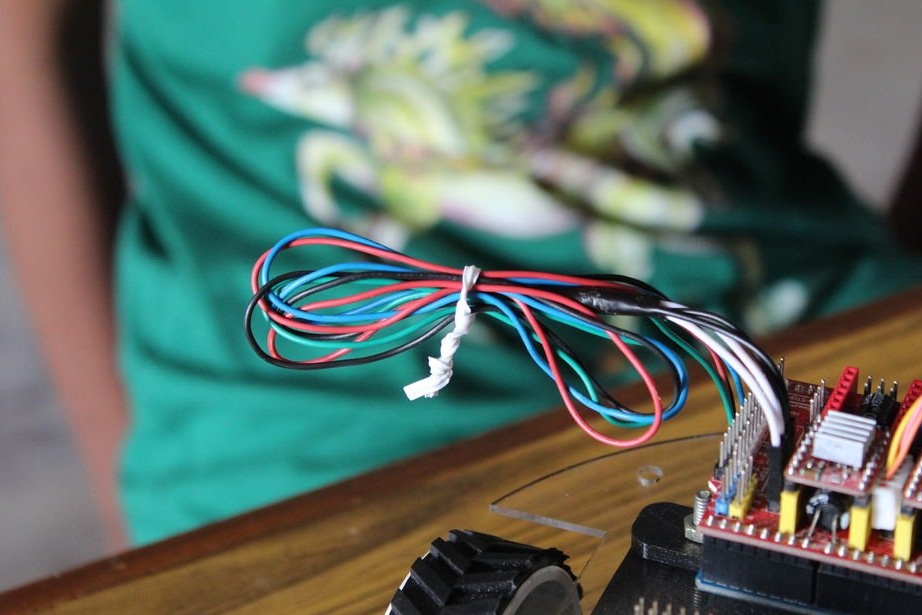
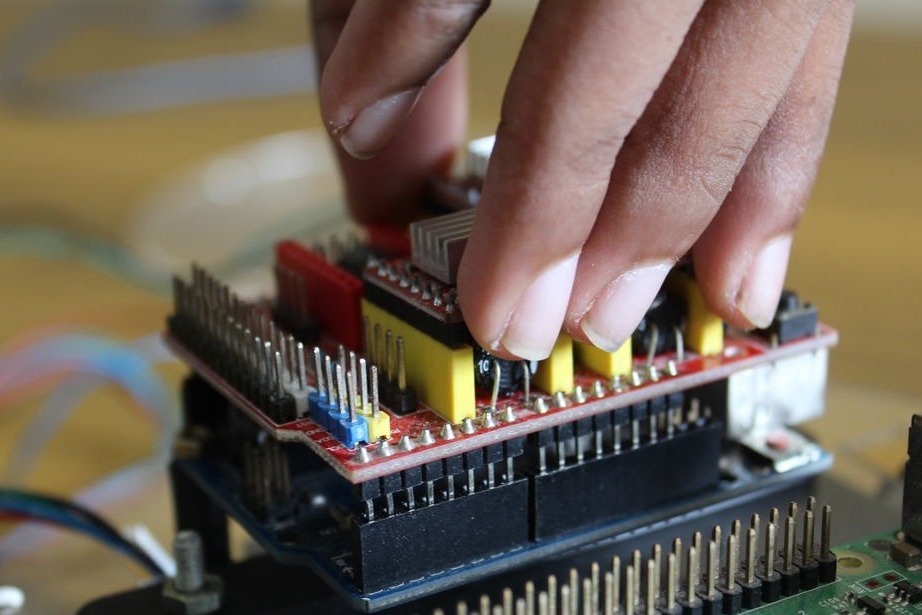
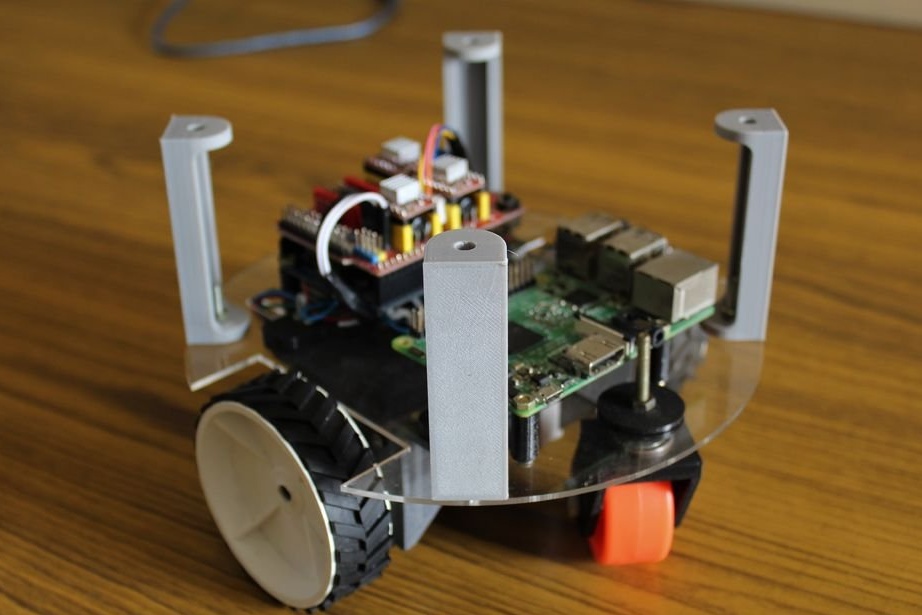
Şimdi elektronik parçanın kurulumuna devam edebilirsiniz. Akrilik paneldeki delikler Arduino ve Raspberry Pi'nin montaj delikleriyle hizalanır. 3D baskılı raflar kullanılarak, elektronik parçalar akrilik panellerin hemen üzerine monte edilir, böylece tüm fazla kablolar altında düzgün bir şekilde gizlenir. Arduino ve Raspberry Pi, M3 somun ve cıvatalarla sabitlenmiştir. Arduino'yu sabitledikten sonra, step motor sürücüsü kurulur ve teller aşağıdaki yapılandırmada bağlanır:
Sol motordan sürücünün X ekseni bağlantı noktasına
Sağ motordan port eksenine Y sürücüsü
Step motorları bağladıktan sonra Arduino'yu Arduino USB kablosu kullanarak Raspberry Pi'ye bağlarken, robotun önü Raspberry Pi'nin monte edildiği taraftır.
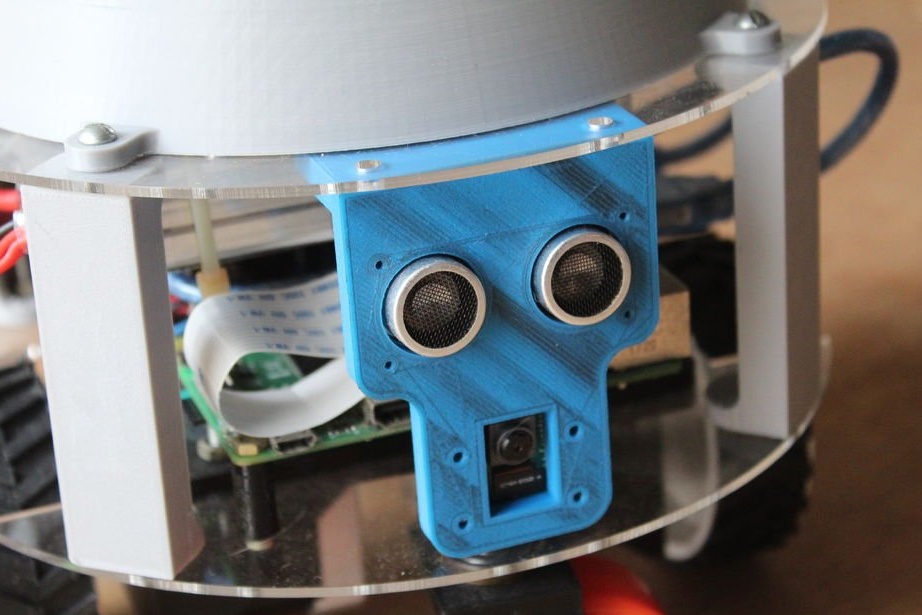
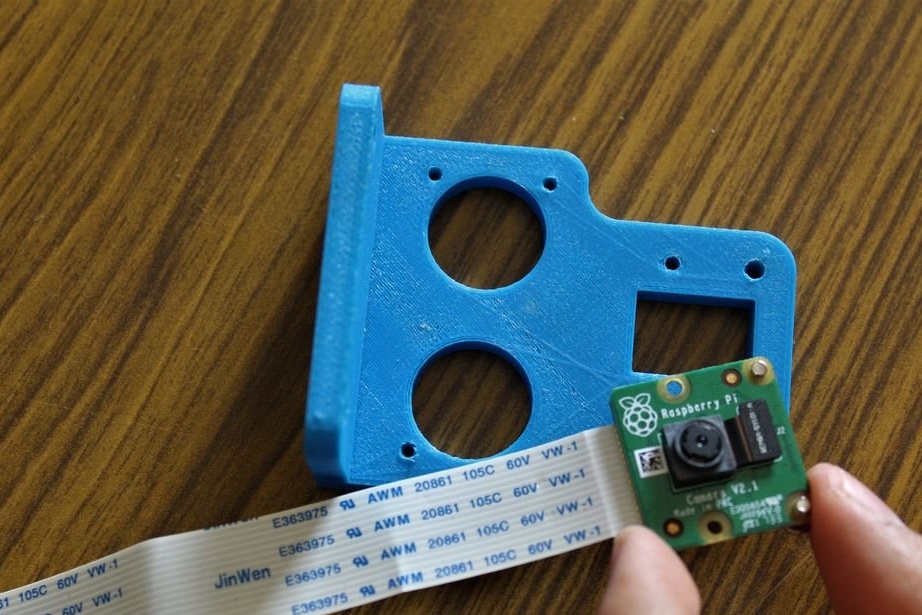
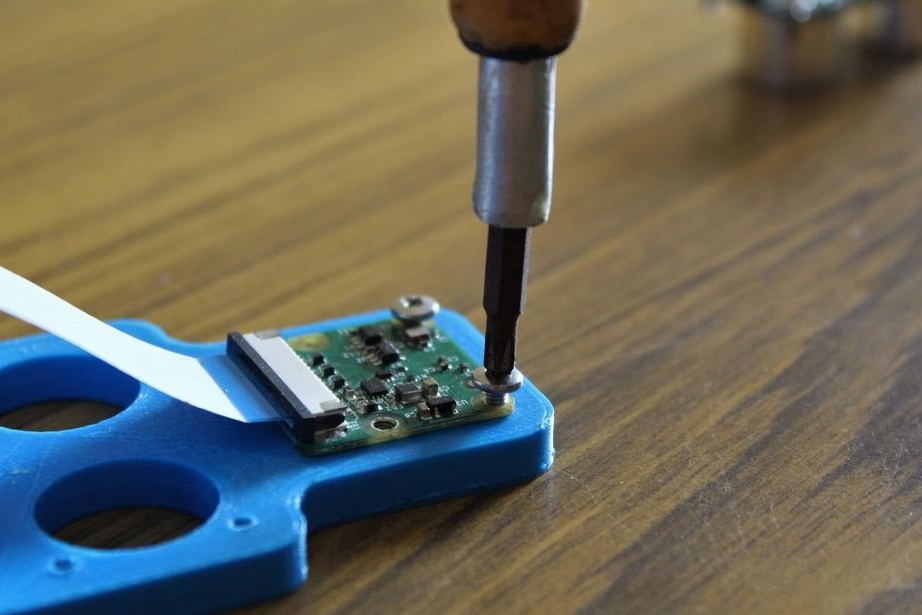
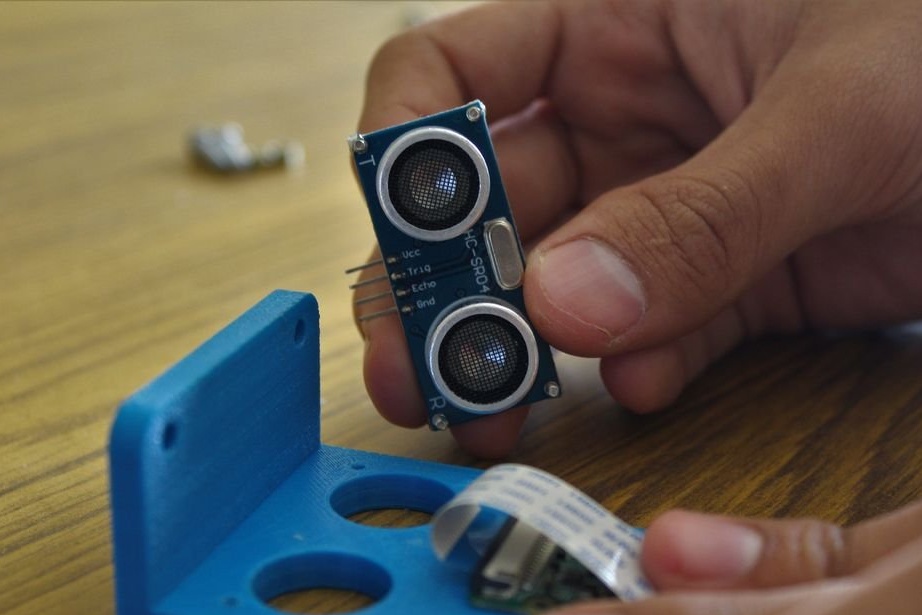
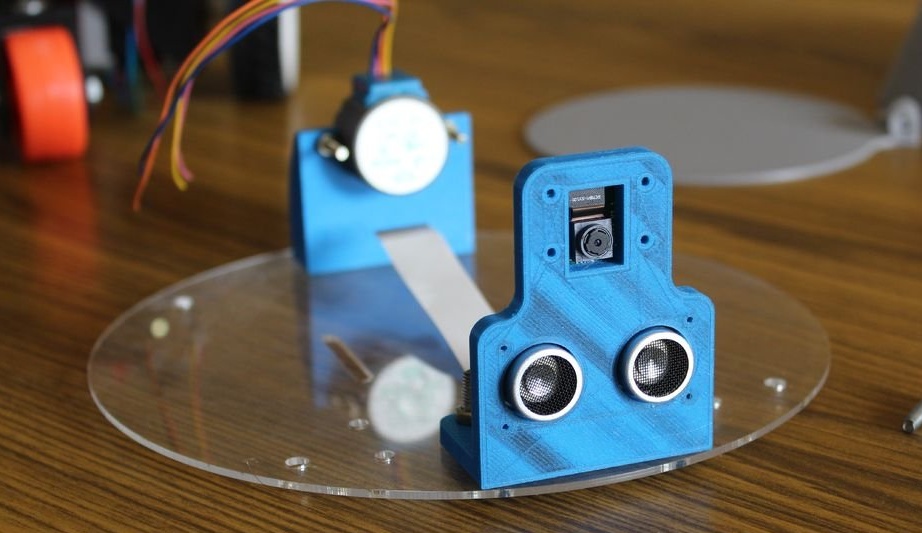
Gözlemlenen robot için ana bilgi kaynağı vizyondur. Sihirbaz, Internet üzerinden kullanıcıya video akışı yapmak için Raspberry Pi uyumlu bir Picamera kullanmaya karar verdi. Robot bağımsız olarak çalışırken engellerden kaçınmak için bir ultrasonik mesafe sensörü de monte edilmiştir. Her iki sensör de vidalarla tutucuya tutturulmuştur.
Picamera, Raspberry Pi bağlantı noktasına takılır. Ultrasonik sensör aşağıdaki gibi bağlanır:
VCC Ultrasonik Sensör - 5V CNC Kalkanı
GND - GND
TRIG - X + uç kilitleme pimi
ECHO - Y + uç durdurma pimi pimi CNC ekran

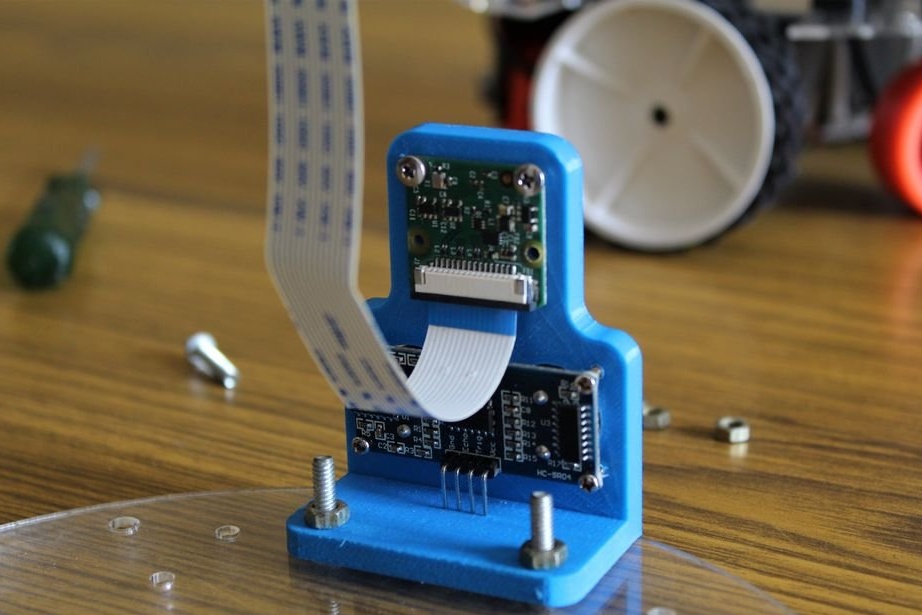
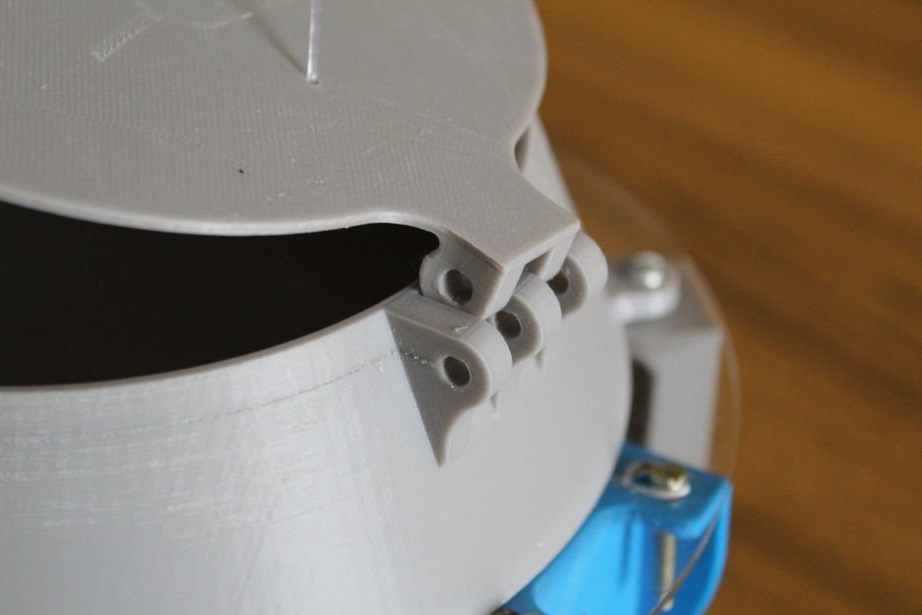
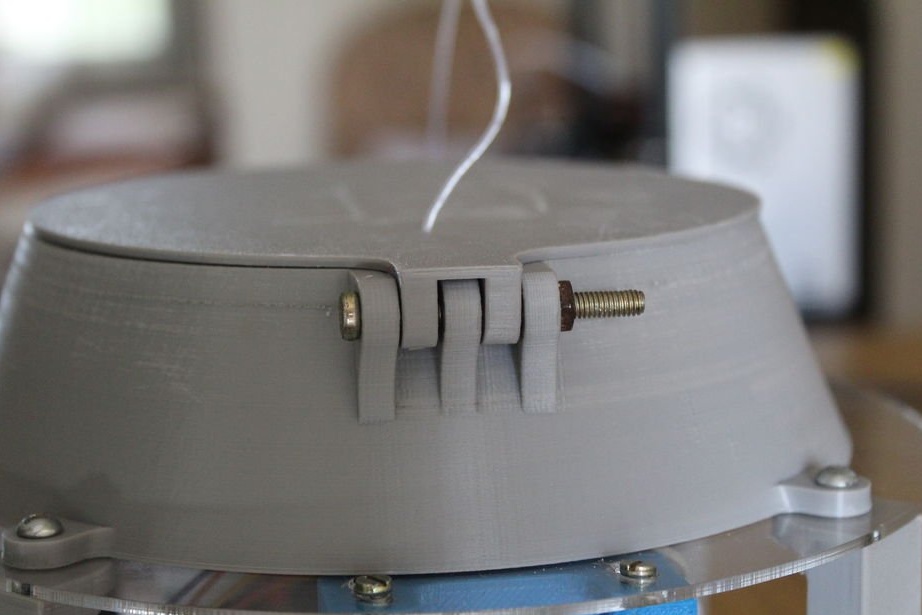
Beşinci Adım: Üstü Takın
Kamerayı üst panelin önüne bağlar. Arkaya bir step motor takılmıştır. Bir muamele ile kabın kapağını açacak.
Dört rafı alt panele sabitler. Raflarda üst akrilik paneli sabitler. Panele bir fincan ekler.

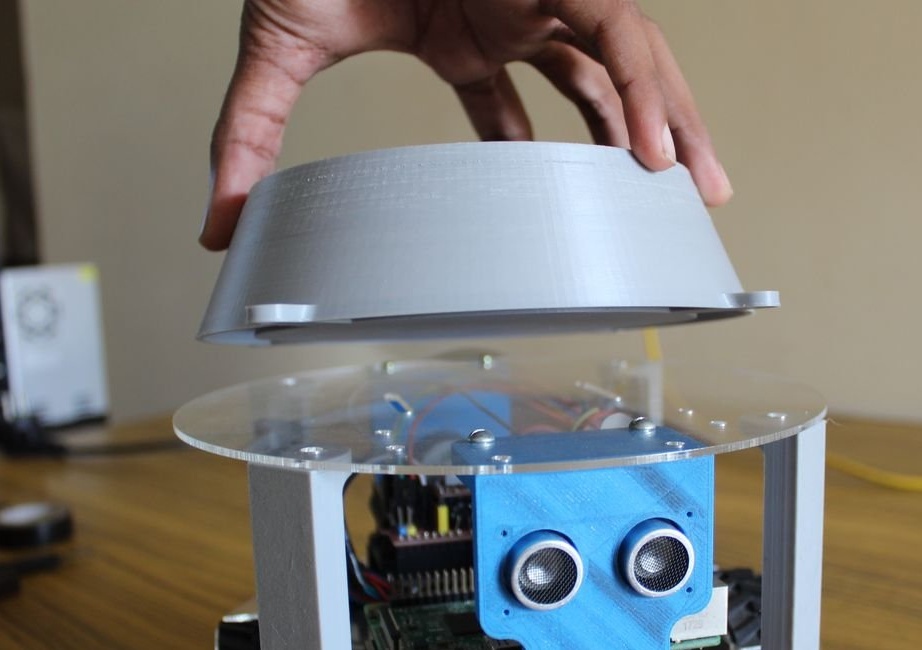
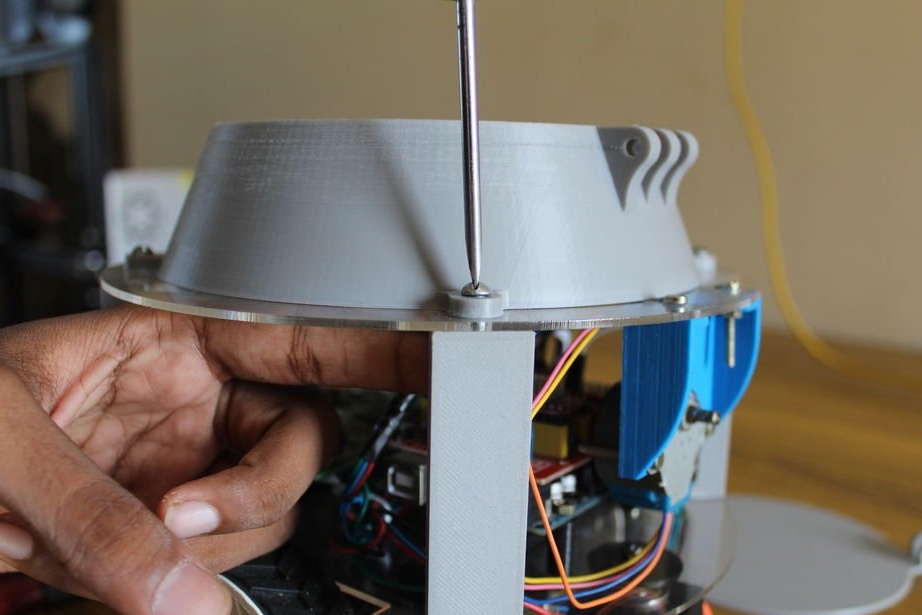
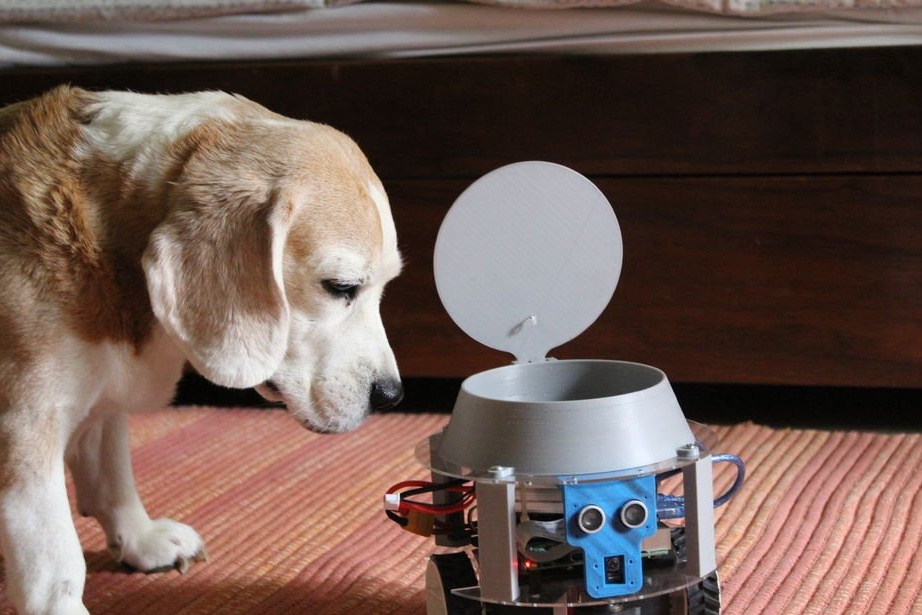
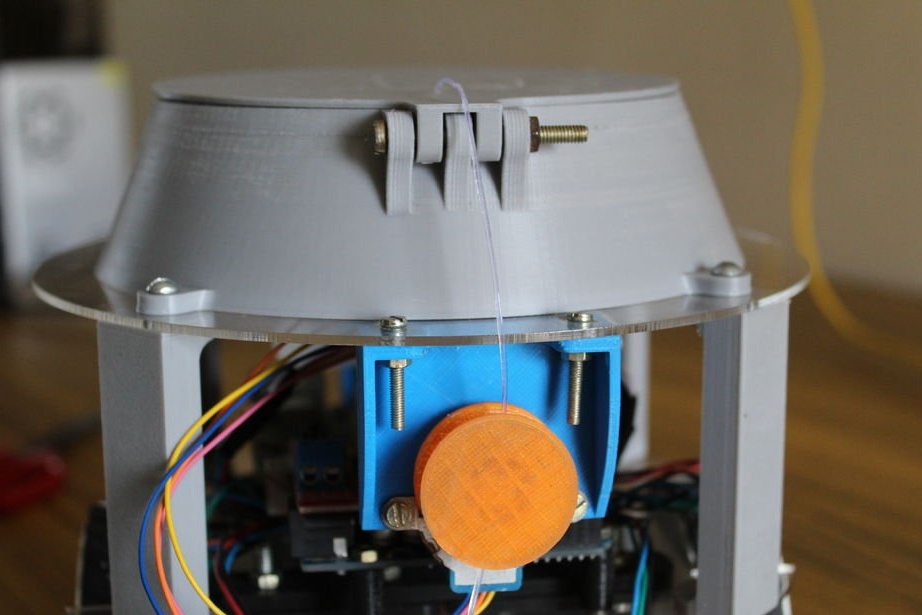
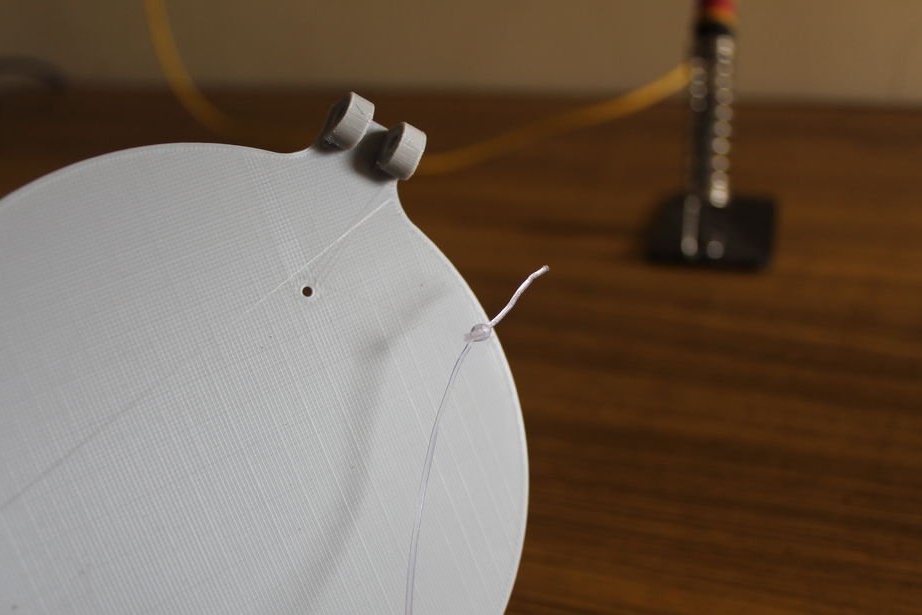
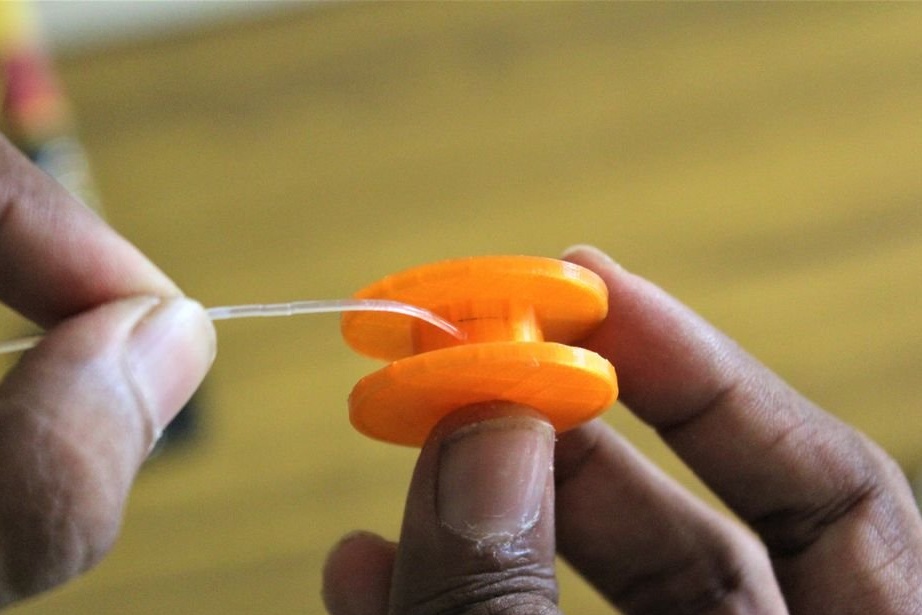
Kapağı takar. Kapak basitçe açılır. Üst step motorun miline bir bobin monte edilmiştir. Makaranın etrafına bir misina sarılır. Oltanın ikinci ucu kapağa tutturulmuştur. Motor dönmeye başladığında, olta tambura sarılır ve kapak açılır.
Altıncı Adım: Bulut
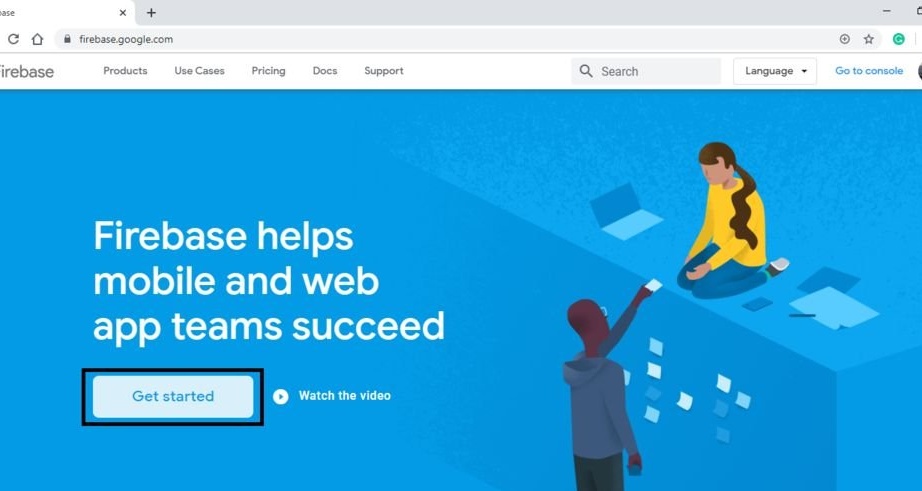
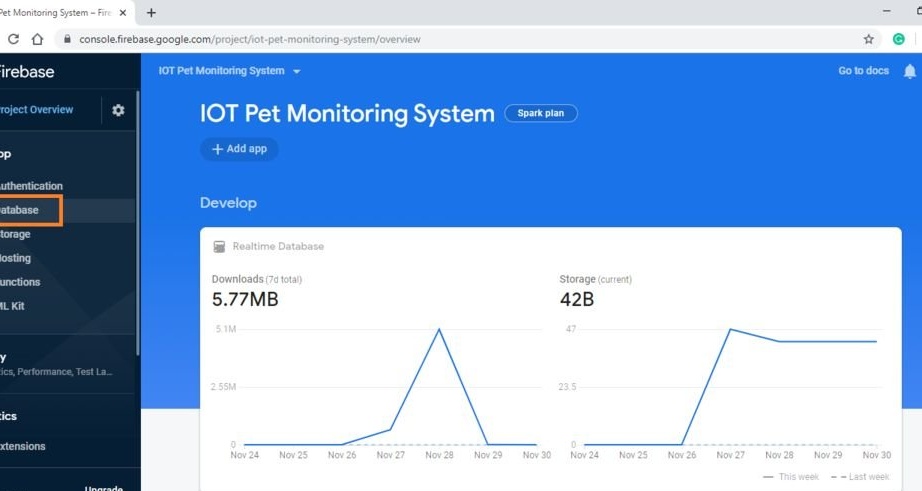
Ardından, dünyanın herhangi bir yerinden mobil uygulamanızdan robotla iletişim kurabilmeniz için sistem için veritabanları oluşturmanız gerekir. Aşağıdaki bağlantıyı tıklayın (Google güvenlik tabanı) sizi Firebase sitesine yönlendirecektir (Google hesabınızla oturum açma). Firebase konsoluna gitmek için Başlayın düğmesini tıklayın. Ardından, “Proje Ekle” ye tıklayarak yeni bir proje oluşturmanız ve gereksinim satırlarını (isim, veri, vb.) Doldurmanız gerekmektedir.
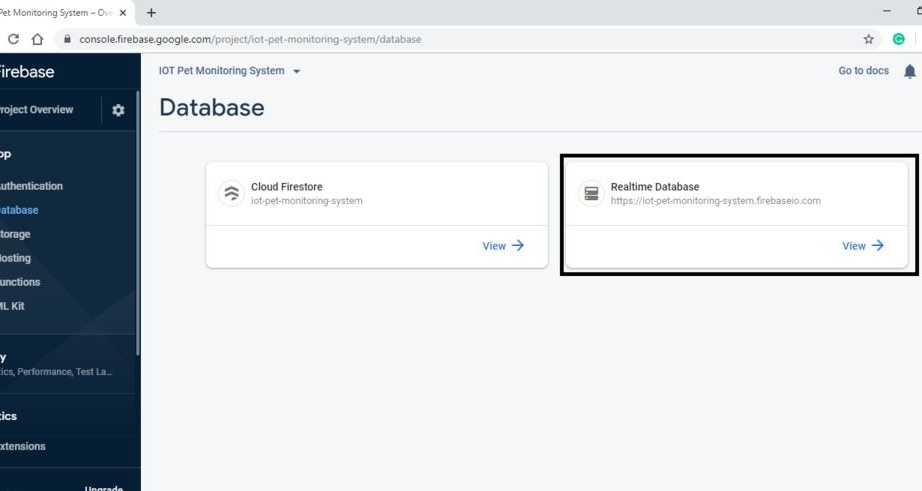
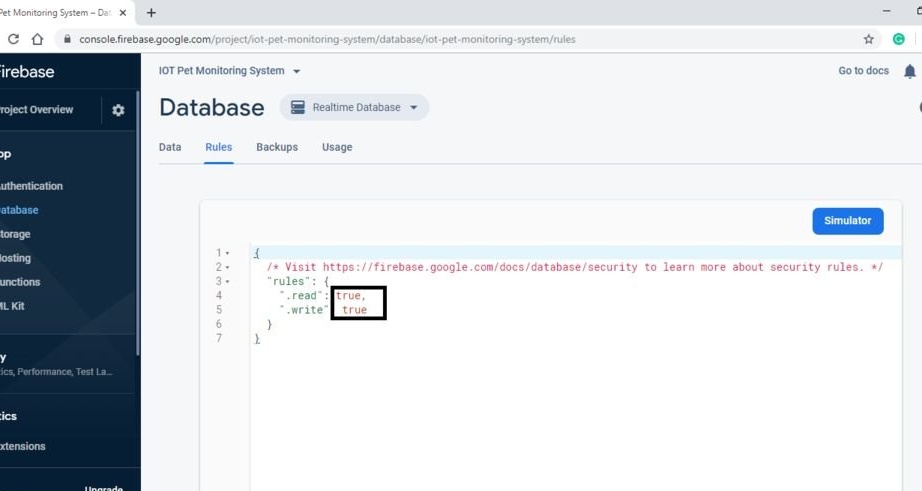
Soldaki menüden "veritabanı" yı seçin. Ardından, "Veritabanı Oluştur" düğmesini tıklayın, "test modu" seçeneğini seçin. Üst taraftaki açılır menüyü tıklayarak "bulut firestore" yerine "gerçek zamanlı veritabanı" nı ayarlayın. “Kurallar” sekmesini seçin ve “yanlış” ı “doğru” olarak değiştirin. Ardından, "veri" sekmesini tıklamanız ve veritabanı URL'sini kopyalamanız gerekir.
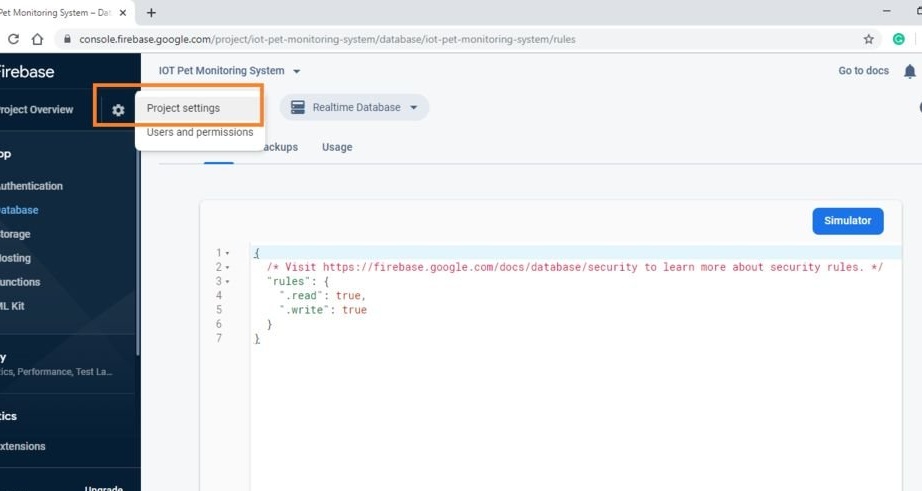
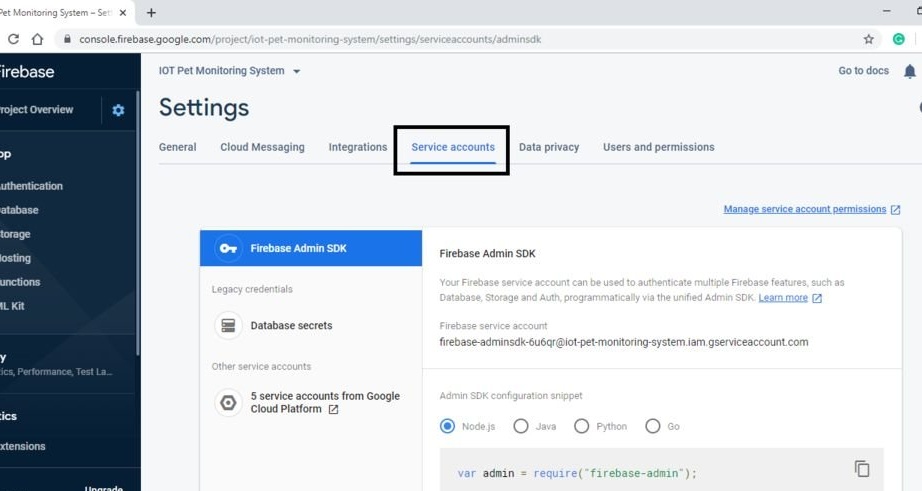
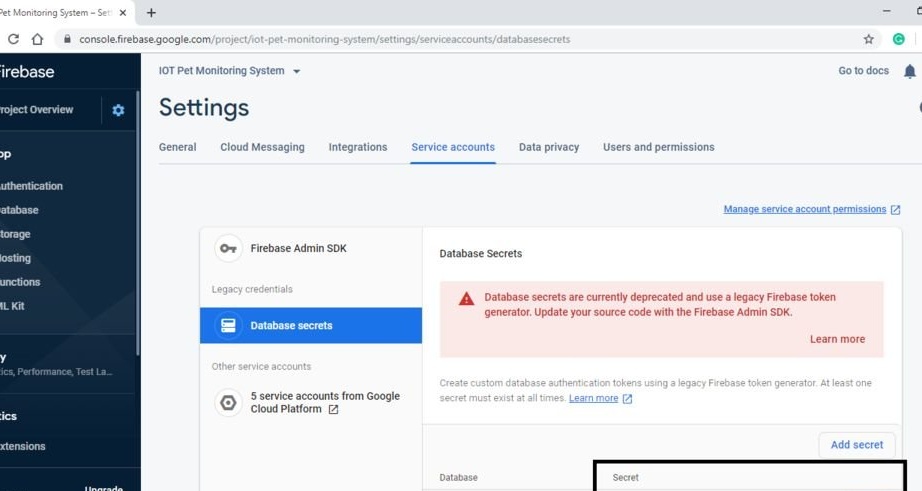
Yapılacak son şey, projeye genel bakışın yanındaki dişli çark simgesini tıklayıp ardından “proje ayarları” nda “hizmet hesapları” sekmesini seçin, son olarak “Veritabanı Sırları” nı tıklayın ve veritabanınız için güvenli kodu yazın. Bu adımı tamamlayarak, akıllı telefonunuzdan ve Raspberry Pi ile erişilebilen bulut veritabanınızı başarıyla oluşturdunuz.
Yedinci adım: akıllı telefon uygulaması
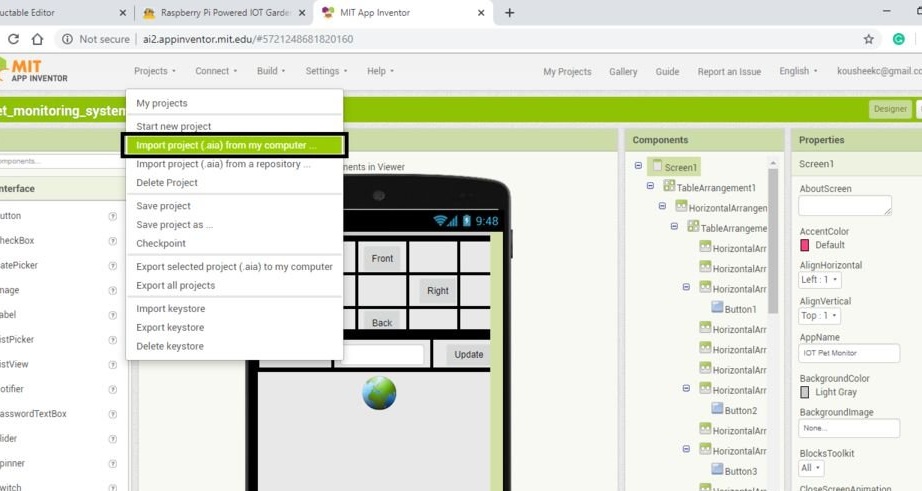
Sonraki bölüm bir akıllı telefon uygulaması. Sihirbaz kendi uygulamasını oluşturmak için MIT App Inventor'ı kullanmaya karar verdi. Oluşturulan uygulamayı kullanmak için, önce aşağıdaki bağlantıyı açın (MIT Uygulama Mucidi)web sayfalarına yönlendirir. Ardından, ekranın üst kısmındaki "uygulama oluştur" u tıklayın ve Google hesabınıza giriş yapın.
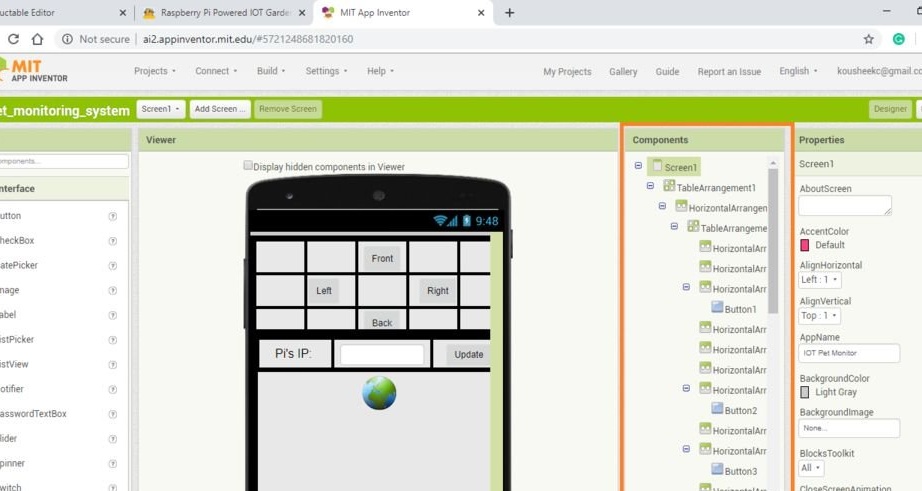
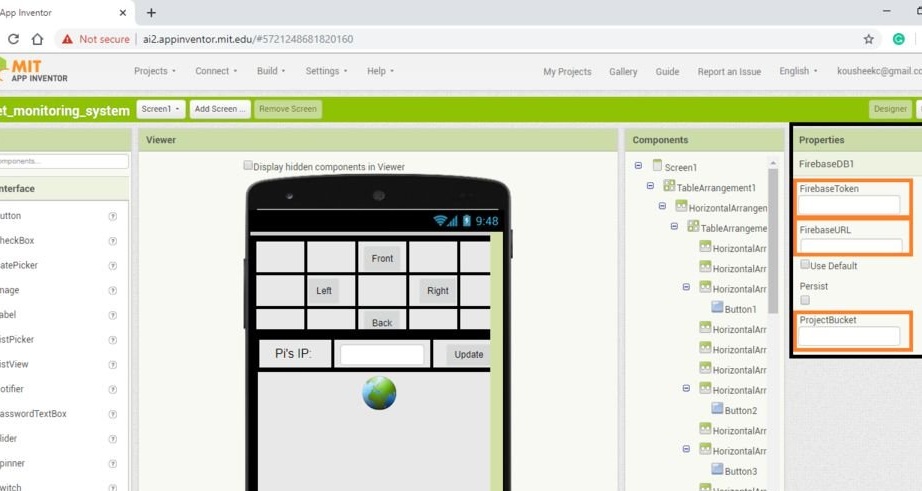
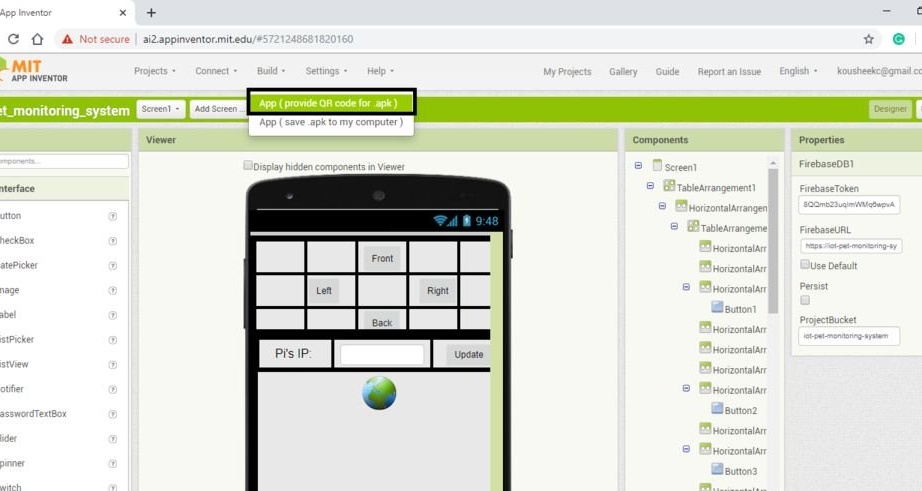
Ardından, aşağıda listelenen dosyayı indirmeniz gerekir."Projeler" sekmesini açın ve "Projeyi bilgisayarımdan (.aia) içe aktar" ı tıklayın, ardından yeni indirdiğiniz dosyayı seçin ve "Tamam" ı tıklayın. Bileşen penceresinde, “FirebaseDB1” i görene kadar aşağı kaydırın, üzerine tıklayın ve “FirebaseToken”, “FirebaseURL” öğesini yukarıda kopyalanan değerlerle değiştirin. Bu adımları tamamladıktan sonra uygulamayı indirip yükleyebilirsiniz. Uygulamayı "Oluştur" sekmesini tıklayıp "Uygulama (.apk için QR kodu sağlayın)" ı ve ardından akıllı telefonunuzdan QR kodunu tarayarak veya "Uygulama (.apk'ı bilgisayarıma kaydet)" seçeneğini tıklayarak doğrudan telefonunuza indirebilirsiniz.
IOT_pet_monitoring_system.rar
Sekizinci Adım: Raspberry Pi Programlama
Raspberry Pi iki ana nedenden dolayı kullanılır.
Canlı video akışını robottan web sunucusuna aktarır. Bu akış, bir mobil uygulama kullanılarak kullanıcı tarafından görüntülenebilir.
Firebase veritabanındaki güncellenmiş komutları okur ve Arduino'ya gerekli görevleri tamamlamasını söyler.
Raspberry Pi'nizi canlı akış için yapılandırmak için bulabileceğiniz ayrıntılı bir kılavuz zaten var. burada. Talimatlar üç basit komuta kadar gelir. Raspberry Pi'yi açın, bir terminal açın ve aşağıdaki komutları girin.
git clone https://github.com/silvanmelchior/RPi_Cam_Web_Interface.git
cd RPi_Cam_Web_Interface
./install.shKurulum tamamlandıktan sonra Pi'yi yeniden başlatın ve herhangi bir web tarayıcısında Pi'nizin http: // IP adresini arayarak akışa erişebilirsiniz.
Canlı yayını ayarladıktan sonra, bulut veritabanını kullanabilmek için belirli kitaplıkları indirip yüklemeniz gerekir. Pi'nizdeki terminali açın ve aşağıdaki komutları girin:
sudo pip kurulum istekleri == 1.1.0
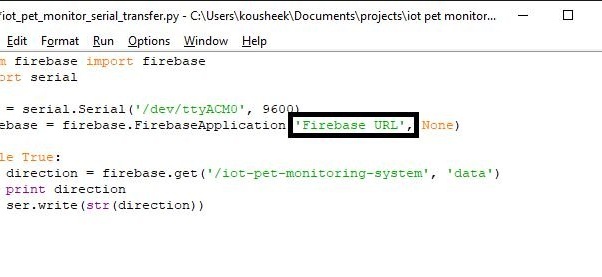
sudo pip yüklemek python-firebaseAşağıdaki python dosyasını indirin ve Raspberry Pi'nize kaydedin. Dördüncü kod satırında, COM bağlantı noktasını Arduino'nun bağlı olduğu bağlantı noktasına değiştirin. Ardından, 8. satırdaki URL'yi daha önce yazdığınız Firebase URL'siyle değiştirin. Son olarak programı terminalden çalıştırın. Bu program bir bulut veritabanından komutlar alır ve bunları seri bağlantı yoluyla Arduino'ya aktarır.
iot_pet_monitor_serial_transfer.py
Dokuzuncu Adım: Arduino Programlama
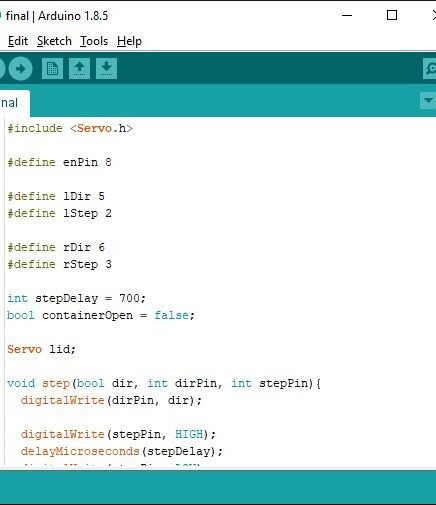
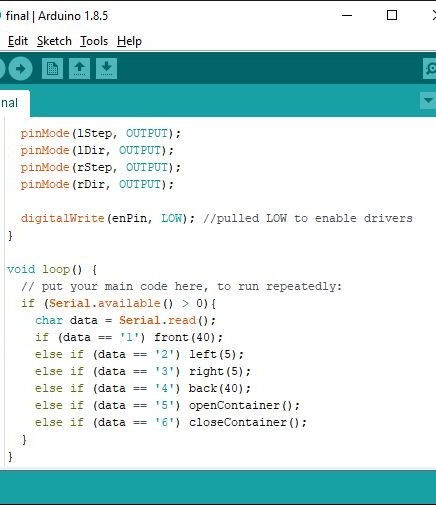
Arduino, Pi'den bir sinyal alır ve aktüatörlere gerekli görevleri yerine getirme komutu verir. Aşağıda eklenmiş Arduino kodunu indirin ve Arduino'ya yükleyin. Arduino'yu programladıktan sonra, özel bir USB kablosu kullanarak Pi'nin USB bağlantı noktalarından birine bağlayın.
final.rar
Onuncu Adım: Beslenme
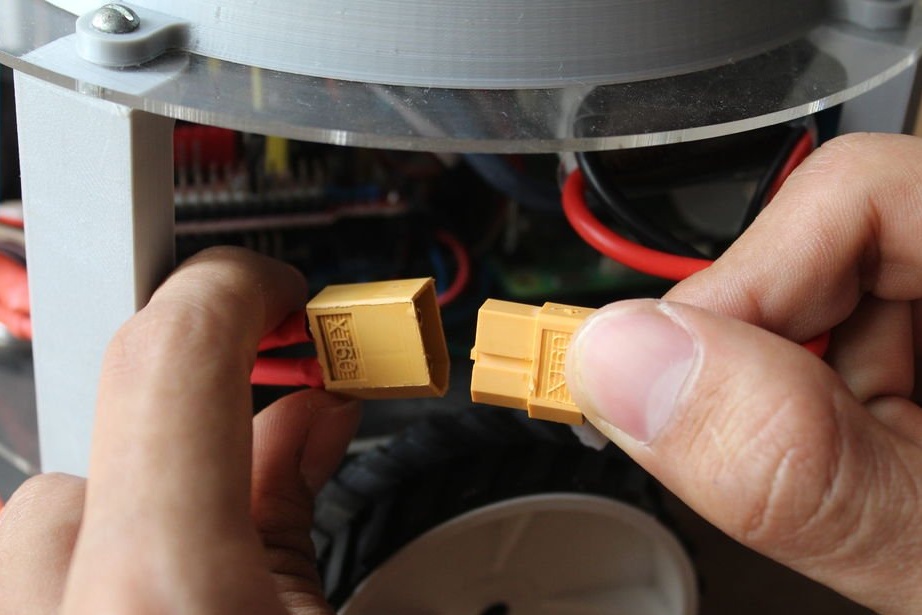
Cihaz bir lityum polimer pil ile çalışacaktır. Akü gücü, motorları çalıştırmak için doğrudan CNC ekranına ve başka bir veri yolunda 5 voltluk UBEC'ye, Raspberry Pi'yi GPIO pinleri ile çalıştırmak için gider. UBEC'den 5V, Raspberry Pi'nin 5V pinine bağlanır ve UBEC'den GND, Pi üzerindeki GND pinine bağlanır.
Onbirinci Adım: Bağlanın
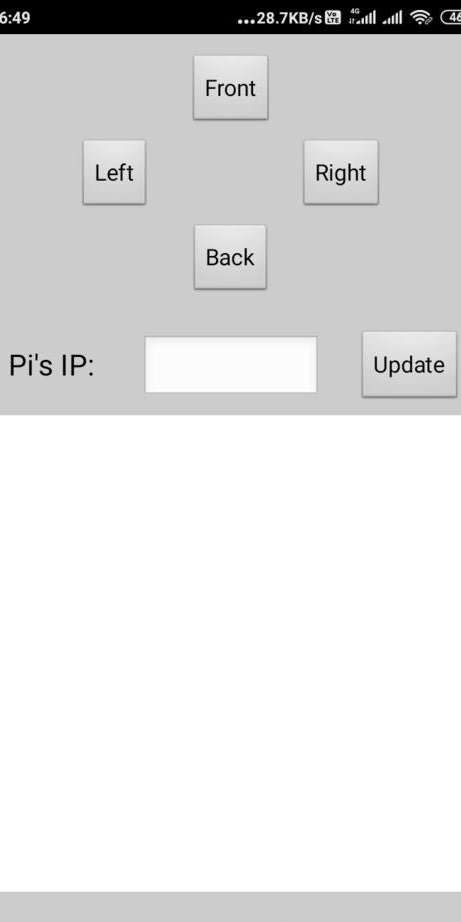
Uygulama arayüzü, gözlemleyen robotu kontrol etmenizi ve yerleşik kameradan canlı yayınlar yayınlamanızı sağlar. Robota bağlanmak için, kararlı bir İnternet bağlantınızın olduğundan emin olmanız ve ardından metin kutusuna Raspberry Pi'nin IP adresini girmeniz ve güncelleme düğmesini tıklamanız yeterlidir. Bundan sonra, ekranda canlı bir yayın görünecek ve robotun çeşitli işlevlerini kontrol etmek mümkün olacak.

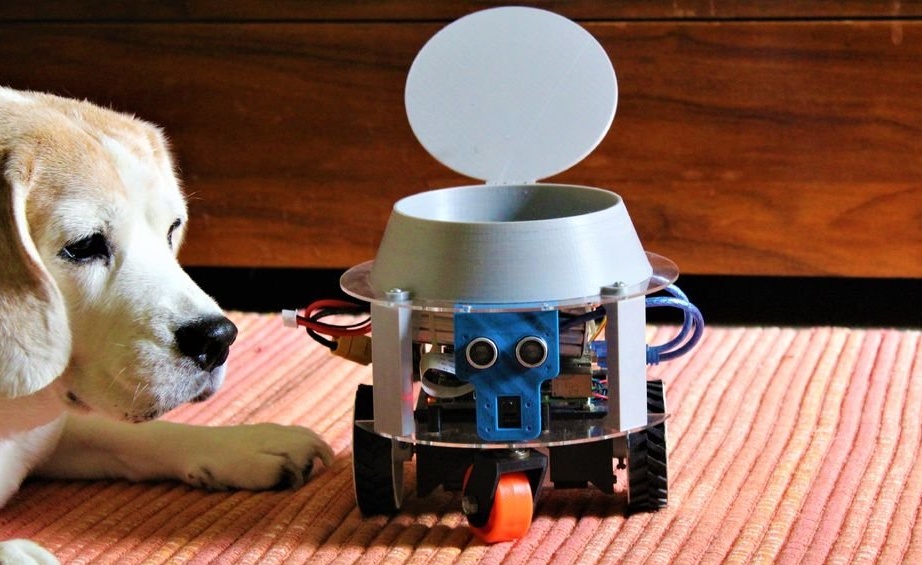
Evcil hayvan izleme robotu tamamen monte edildiğine göre, kaseyi köpekler için bir tedavi ile doldurabilirsiniz.
Efendiye göre, köpek bu hareketli nesnenin ilk korkusunu aşar aşmaz, botu evin etrafında kovaladı. Yerleşik kamera, çevrenin iyi bir geniş açılı görüntüsünü sağlar.