

selamlar sitemizin sakinleri!
Bu sefer, aynı adla YouTube kanalının yazarı AlexGyver, tatil hakkında, bu arada, gerçekten sevmiyoruz, tekrar etmeye karar verdik Adafruit projesi - bir gaz kaynağının camlarına takılan biyonik bir göz.

Kod açısından bakıldığında, bu bitmiş proje kesinlikle ilginç değil, yazar mekanizma, yani koordinat sistemi ile ilgileniyordu.
Buna geri döneceğiz, ama biraz sonra, ama önce tüm mekaniği toplayalım ve her şeyi bağlayalım elektronik bileşenler.
Bu projeyi tekrarlamak için ihtiyacınız olacak:
1) Gaz kaynakçı camları. Hem metal hem de plastik kullanabilirsiniz.

Plastik kesinlikle daha iyi uyuyor, ancak elbette kalite övünemezler. Özellikle, bu örnekte, plastikten yapılmış, yanlar tam anlamıyla hemen düştü ve yazar bunları yapıştırmak zorunda kaldı.

Bu tür gözlükler mağazadan alet veya inşaat malzemeleri satan satın alınabilir. Yazar bunları All Instruments mağazasından satın aldı.
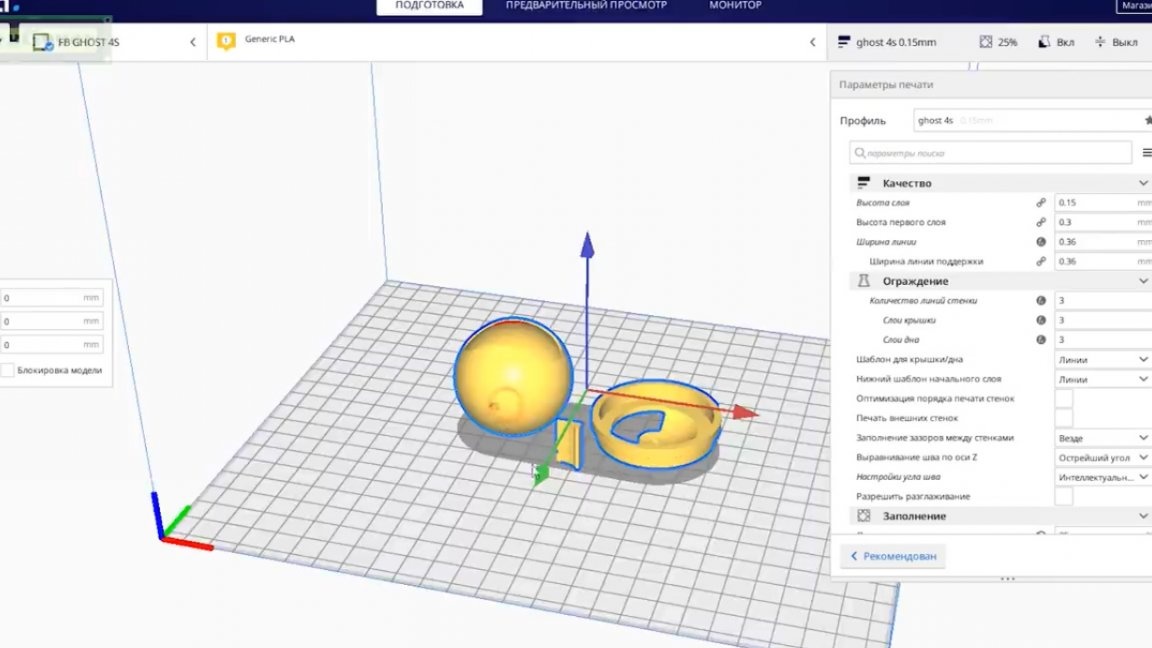
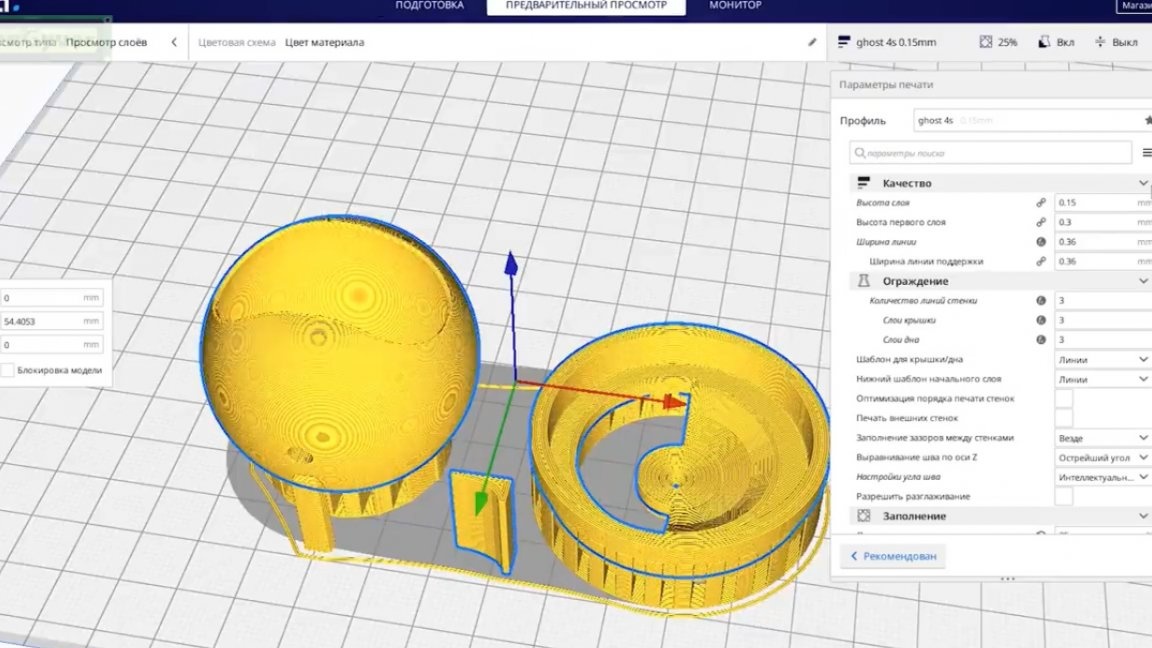
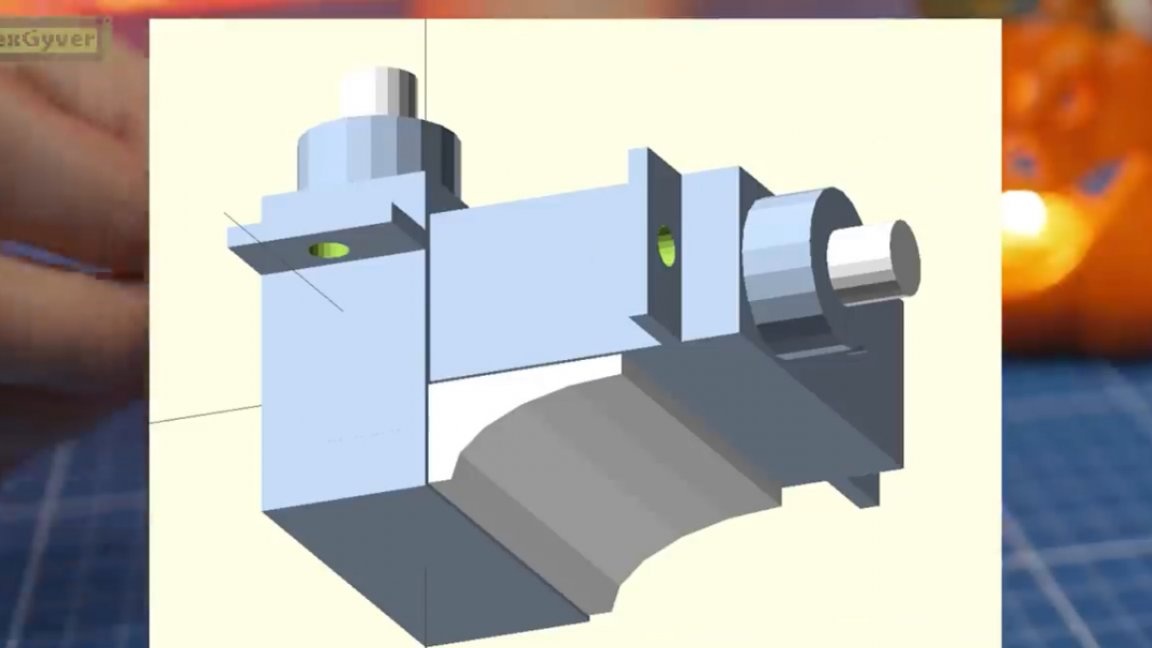
2) Sonra bu baskıya ihtiyacımız var 3D yazıcı yedek parçalar.
Yazar, yeni 32 bit uçan ayı hayalet 4s 3D yazıcı üzerine beyaz PLA plastik ile öğeleri yazdırdı. dosya aynı anda 3 modelin tümünü içerir. Destekler ile yazdırma gereklidir.

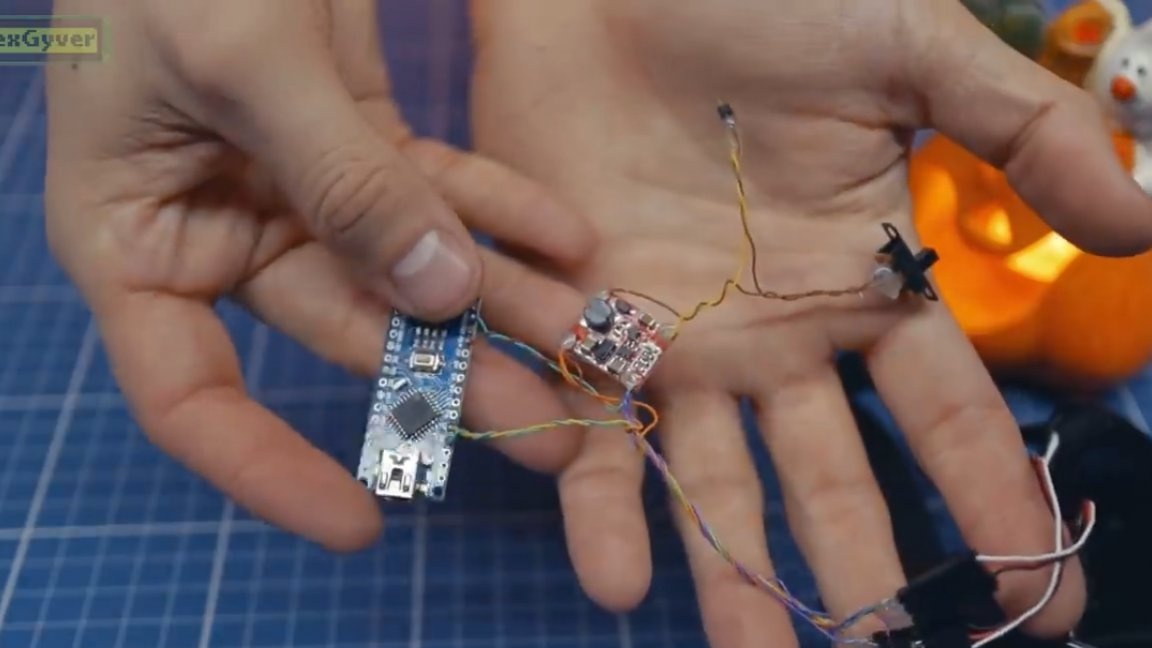
3) Cadılar Bayramı özel projemiz için bir sonraki bileşen platform Arduino Nano Modelleri.

4) Ayrıca gerekli lityum iyon pil:
5) DC-DC (5V'a kadar) dönüştürücüyü artırın;
6) geçiş:

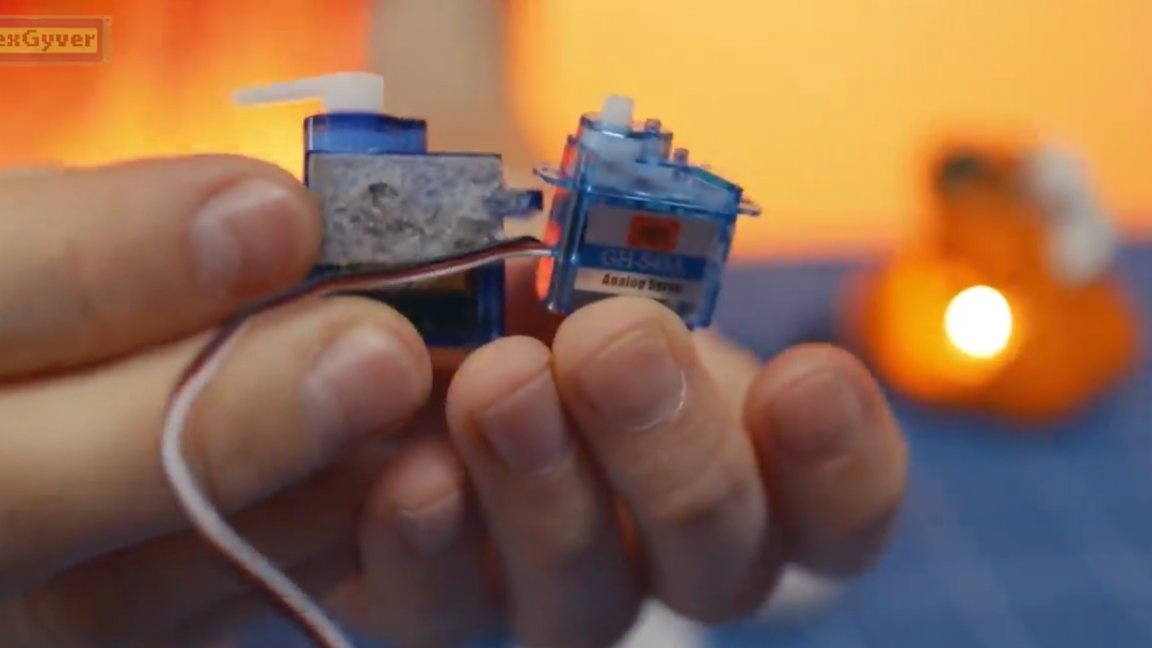
7) Mikro servolar, ancak standart 9 gram değil, daha da az:
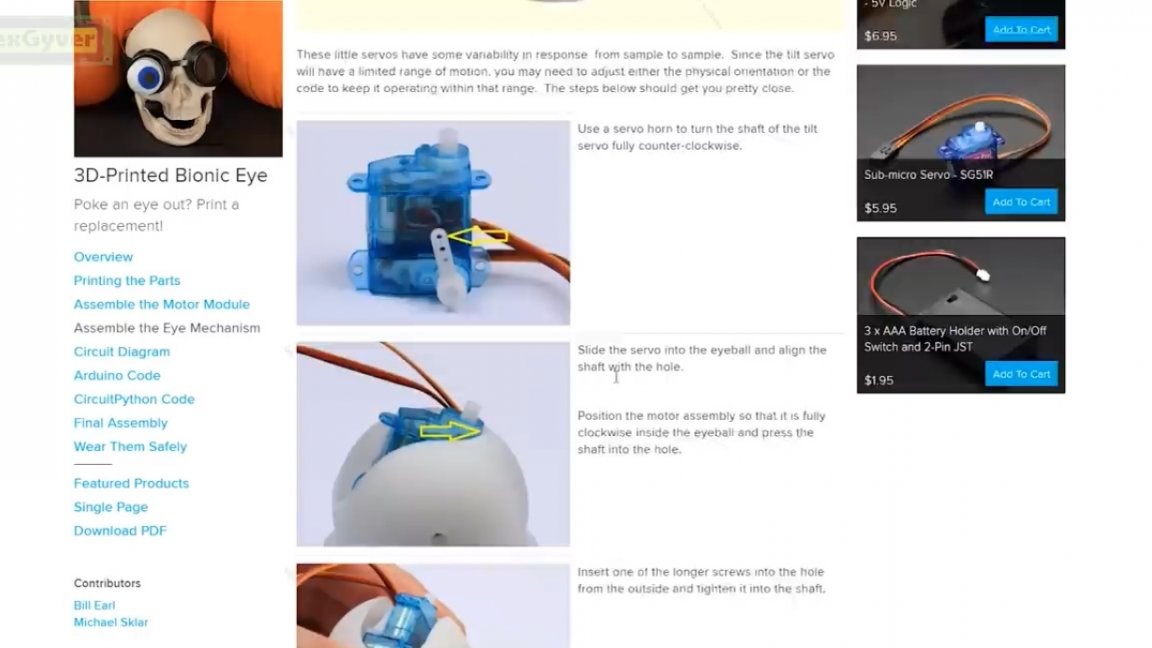
Yani, gerekli bileşenlerle, bir şekilde çözüldü, cihazı monte etmeye başlayalım. İlk olarak, sürücüleri aşağıdaki gibi monte etmemiz gerekir:
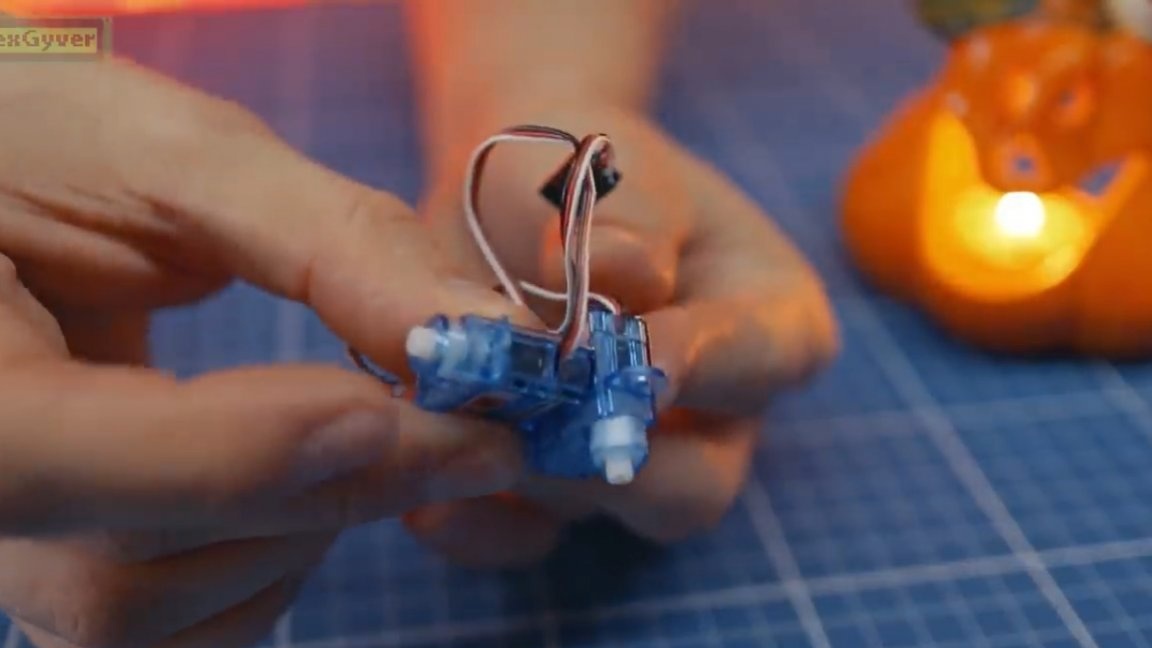
İşte daha anlaşılır bir resim:
Etiketi çıkarırız ve superglue yardımıyla tüm bunları bağlarız.


Bu arada, Çin servoları Adafruth olanlardan biraz farklı gibi görünüyor ve bunları biraz ofsetle yapıştırmanız gerekiyor:
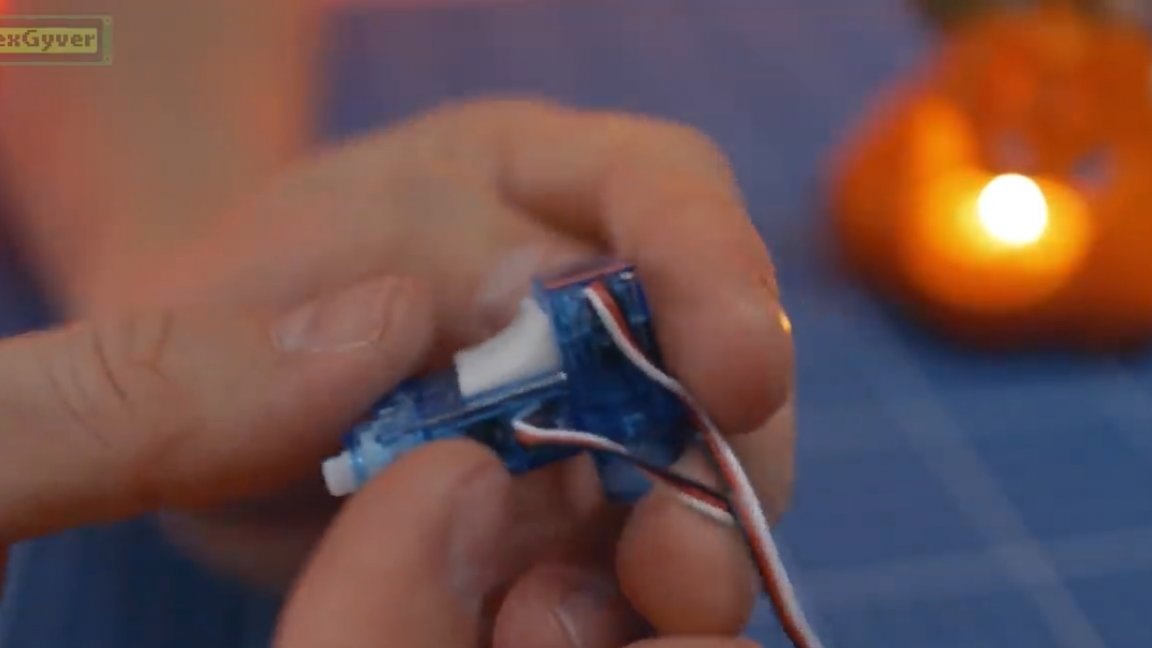
Kulaklar çıkarılmalı, müdahale edecektir.
Daha sonra alt sürücüye, külbütörü asıyoruz ve mili saat yönünün tersine çeviriyoruz.

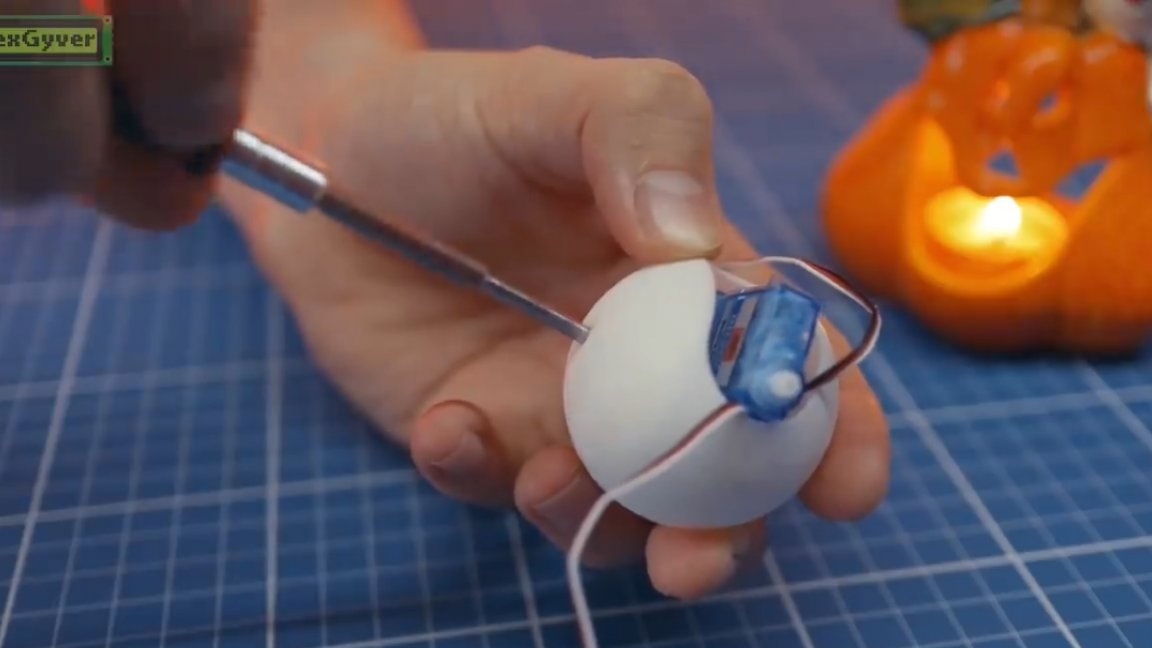
Servoları önceden basılmış 3D yazıcı boş (göz).
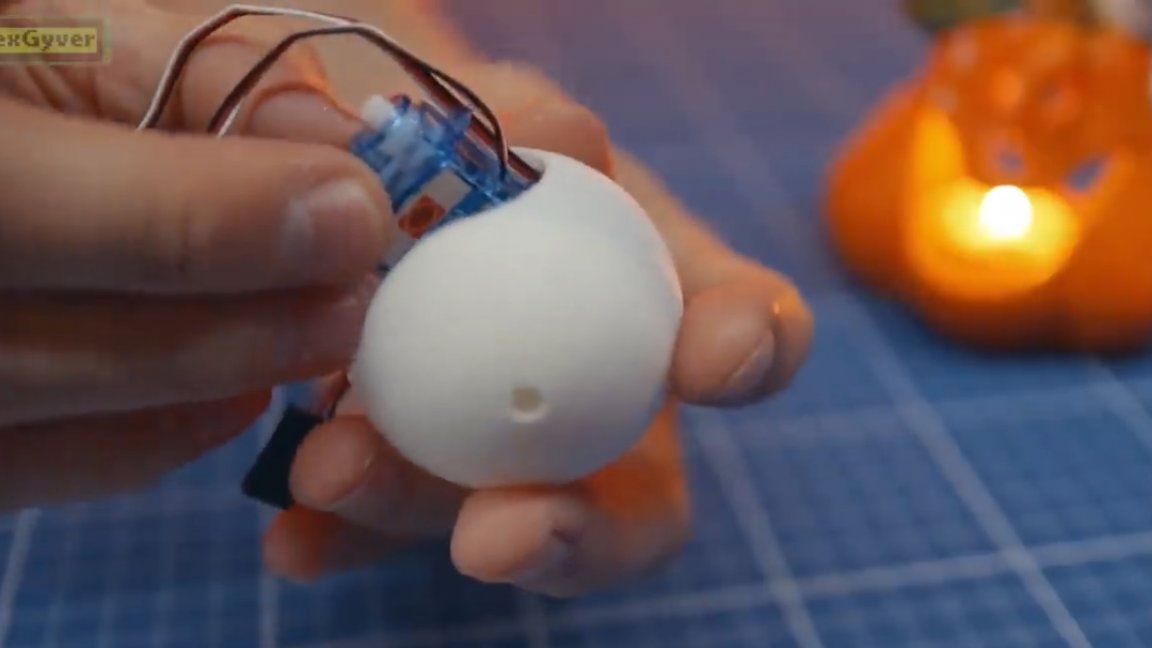
Çıkıntılı tahriki en uç noktaya yaslıyoruz ve çıkış milini gözün içindeki deliğe yerleştiriyoruz.

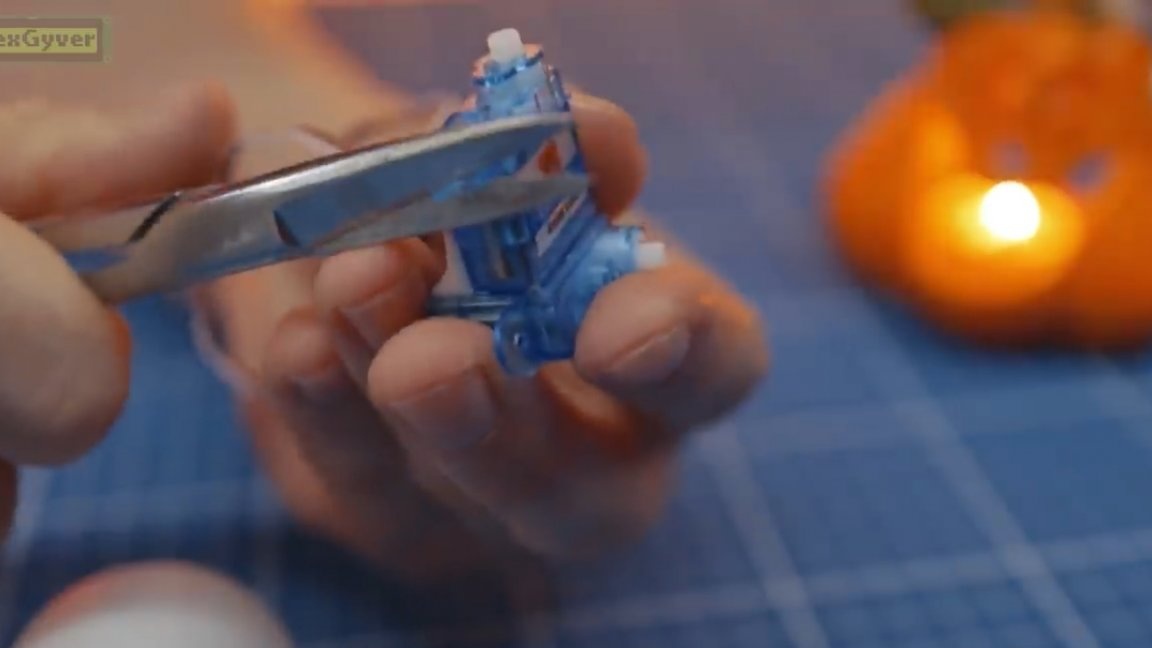
Uzun komple vidanın biraz kısaltılması gerekir. Bu, pense kullanılarak yapılabilir.

Daha sonra, kısaltılmış bir vida kullanarak dahili sürücüyü sabitleriz.
Bir servo test cihazınız varsa, ortaya çıkan mekanizmanın çalışabilirliğini doğrulayabilirsiniz.
Sonra gözün ikinci kısmını ikinci sürücünün şaftına bağlarız ve ayrıca sabitleriz.

Genel performansa ikna olduk (birlikte çalışmalıyız).


Özellikle bu proje için yazar, sürücüleri rastgele bir açıyla sorunsuz bir şekilde döndüren basit bir kod yazdı. Ancak gözün merkezi biraz önyargılıydı, bu yüzden gerçek merkezi bulup öğrenciyi çiziyoruz.

Bu bir tatil projesi olduğundan ve tatil oldukça spesifik olduğundan, biraz daha korkunç hale getirelim.

Ardından, ortaya çıkan parçayı gözlüklerin içine yerleştirin.

Takılmamışsa, biraz pah kırmak gerekir.

Sonra her şeyi bir araya getirdik.


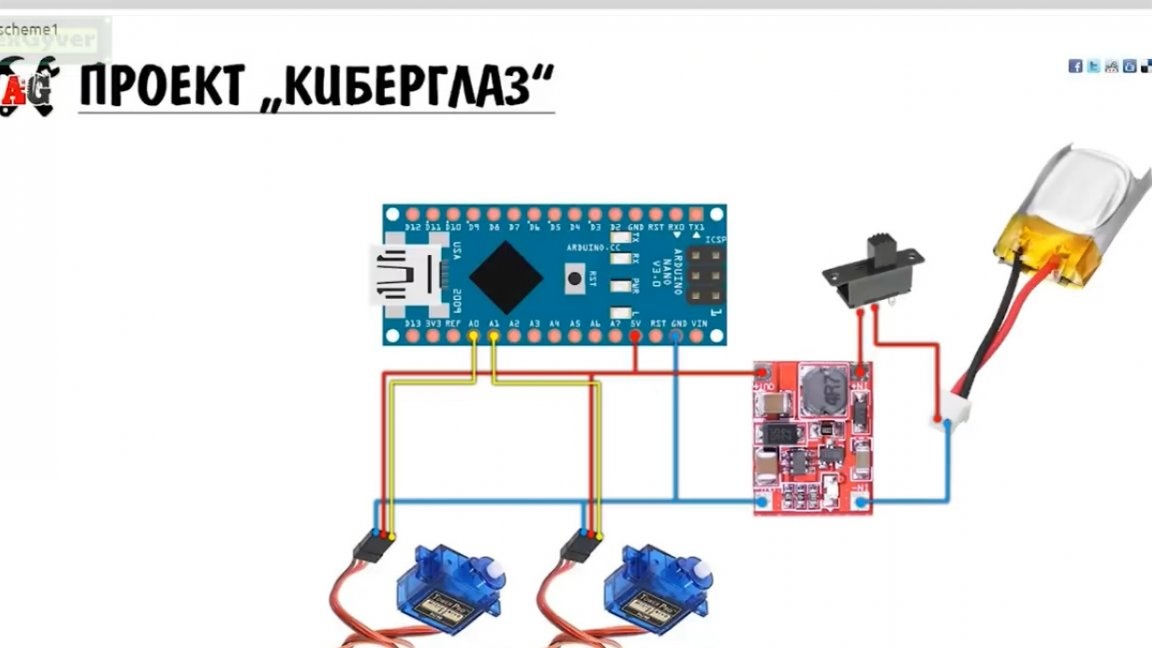
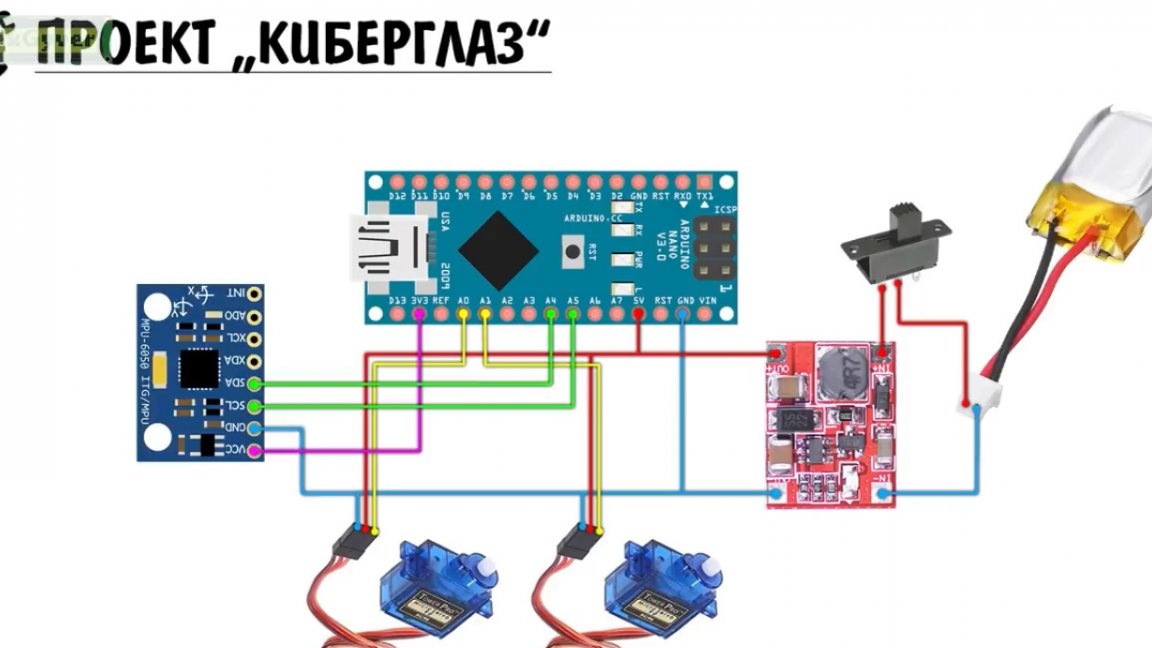
Ardından, tüm bileşenleri aşağıdaki şemaya göre bağlarız:
Her şey hazır, ama şimdi her sürüşümüz rastgele bir açıya yükseliyor ve prensipte böyle bırakabilirsiniz.

Ancak makalenin başında mekanizma ve koordinat sistemi hakkında bahsedildiğini hatırlıyor musunuz? Böylece, mekanizma iki eksen boyunca döner, ancak insan gözünün döndüğü eksenler boyunca değil. Amacımız böyle bir mekanizmanın insan gözü gibi davranmasını sağlamaktır. İlk bakışta bu imkansız gibi görünüyor, ancak öğrenciyi istediğiniz herhangi bir konuma koyabilmeniz için koordinat sistemini normale getirmeyi deneyebilirsiniz.
Yani, iki açımız var, onları X ve Y ile gösteriyoruz.

Y, gözün küçük açısı ve X, gözün 180 derece dönme açısıdır.
Tüm olası pozisyonları elde etmek için her iki açıyı da kontrol etmek gerekir ve bir özgüllük vardır. Maksimum yarıçapa sahip en basit - dairesel hareketle başlayalım.
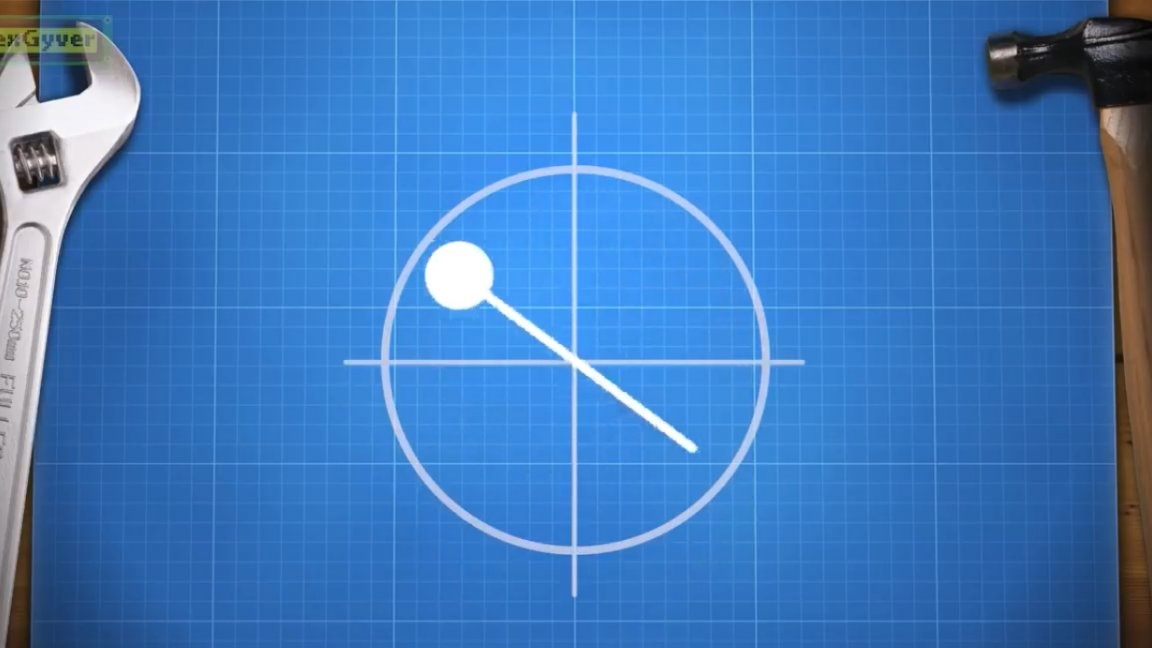
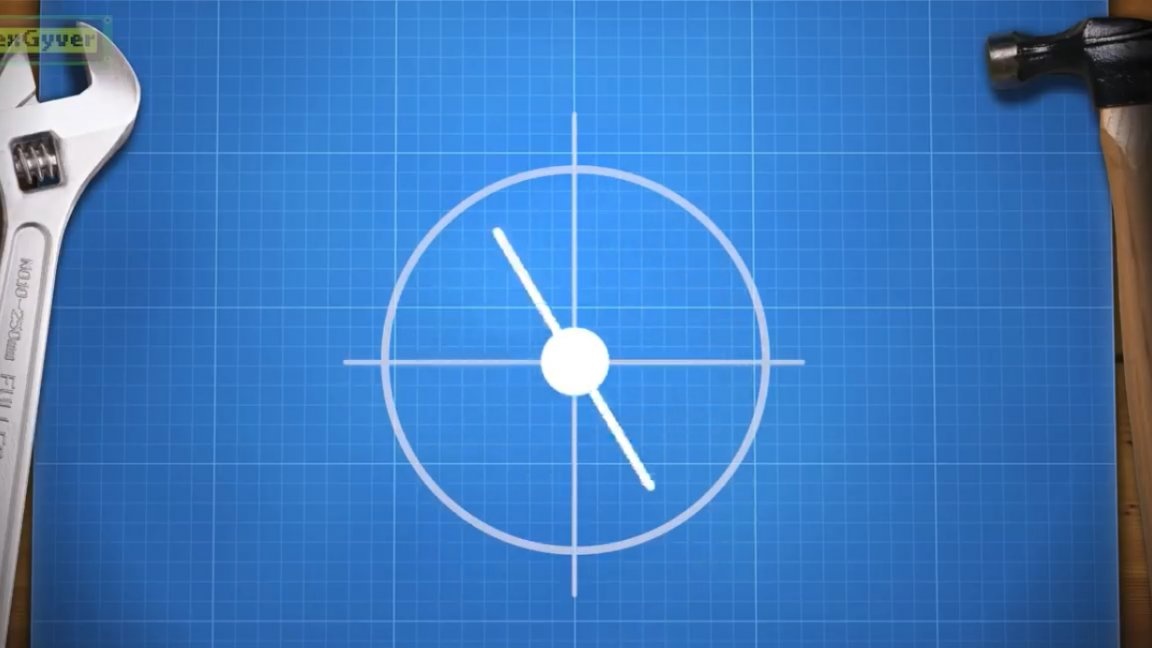
Ama göründüğü kadar basit değil. Bu nedenle, yazarın yaptığı ilk şey, gözün ve yarıçapın dönüş açısını, yani öğrencinin merkezi noktadan 00 çıkarılmasını ayarlayabileceğiniz bir kutupsal koordinat sistemiydi.
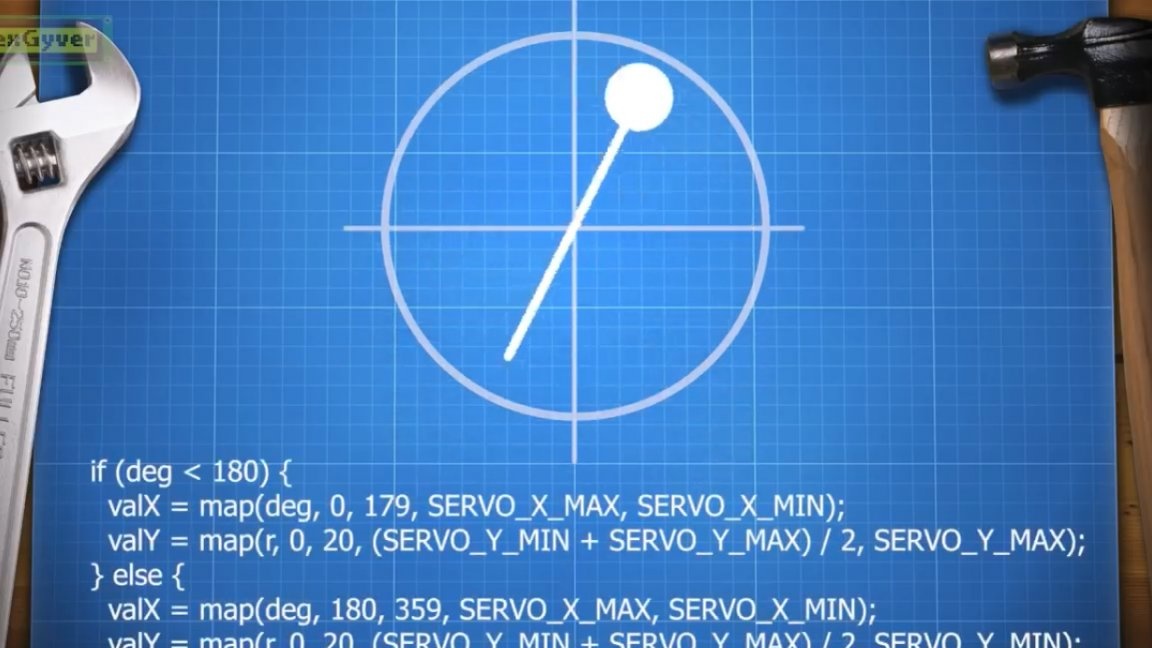

Üst yarım dairede, Y açısının yarısından maksimum değerine ve altta - minimumdan yarısına kadar çalışıyoruz. Şimdi göz hareketi daha ilginç bir şekilde programlanabilir. Hareketlerin kendileri rastgele, ama zaten çevresi etrafında.


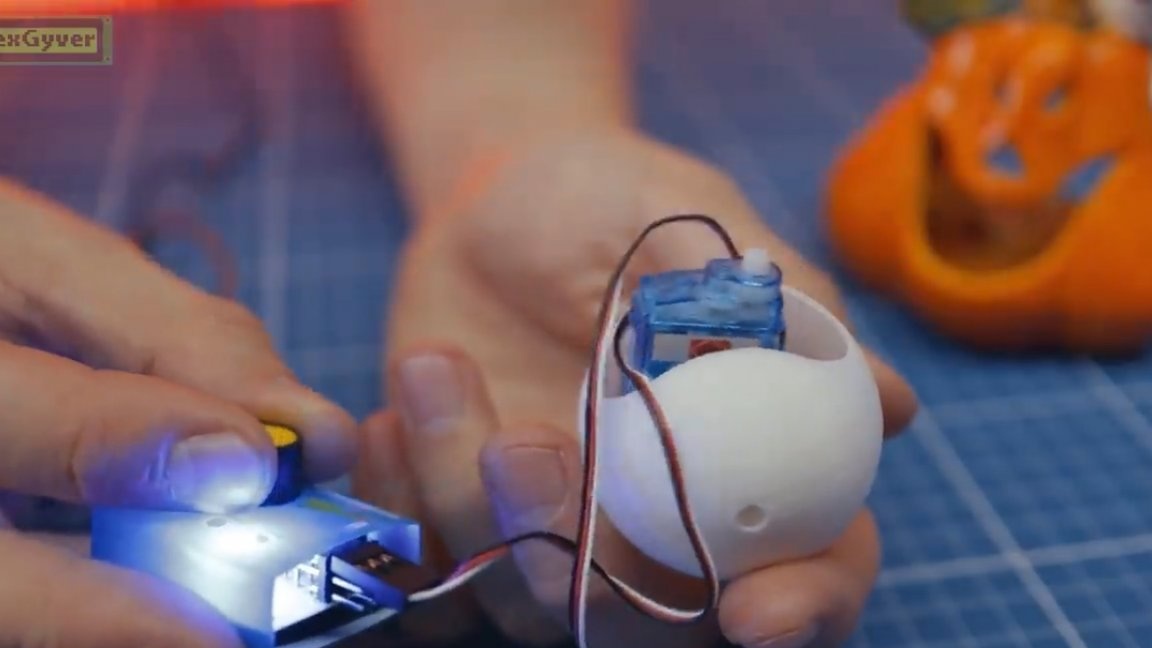
Şimdi tüm elektroniği lehimleyelim, her şey şemadaki gibi:
Açmaya çalışıyorum.
Gösterge. Şimdi tüm bunları bir tür binada saklıyoruz (bu durumda, yazar bir kene-tac kutusu kullandı).

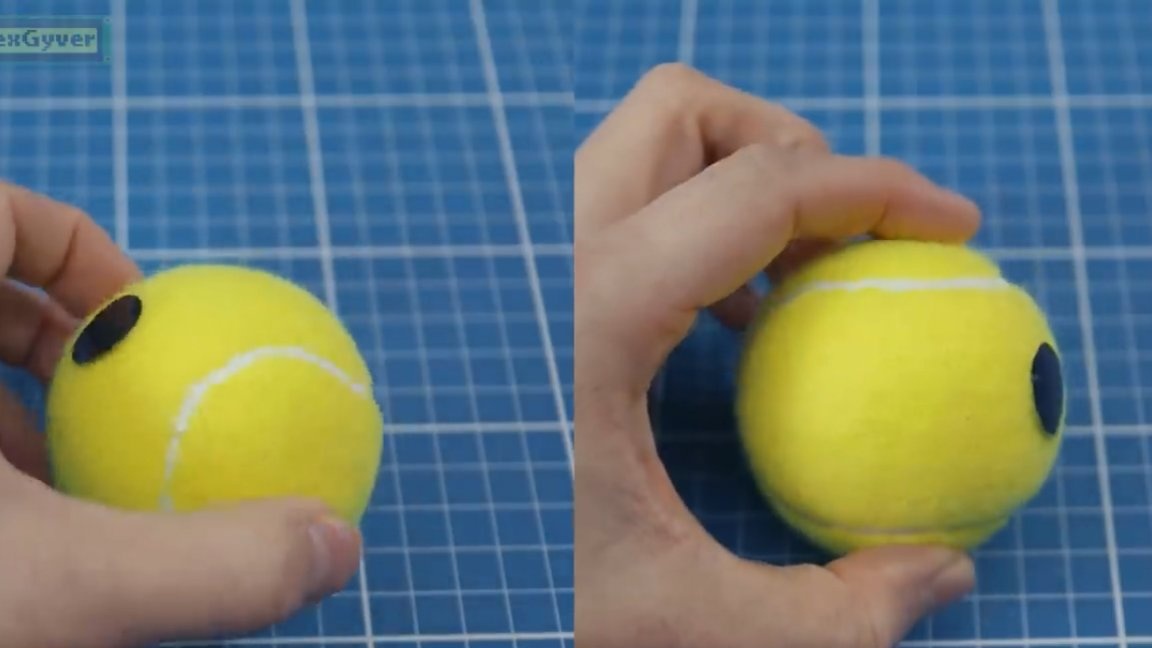
Tüm siber gözlerimiz hazır. İşte böyle bir şaka.


Ama yine de teorik araştırmamıza devam edelim ve kutupsal koordinat sistemini Kartezyen'e çevirelim, daha sonra nedenini anlayacağım.

Burada her şey basit, atan2 işlevi bize –P'den P'ye radyan cinsinden açı döndüren ve aynı iki koordinattaki hipotenüsün uzunluğunu hesaplayan hipot fonksiyonuna yardımcı olacak ve hipotenüs önceki fonksiyonumuzun yarıçapıdır.

Ve böylesine basit bir şekilde, deneysel özne şimdi tam olarak ihtiyacımız olan yere (yukarı, aşağı, sağa, sola) gözünü döndürebilir.

Peki bu neden gerekli? Ekleyebilmek için bu gereklidir jiroskopgözün kafa ile aynı yöne döneceği, muhtemelen oldukça komik görünecek. Aslında proje eklendi jiroskop mpu6050, şemada şöyle görünür:
Kodu değiştirin, jiroskoptaki okumaların gözü saptırdığından emin olun. Filtre boyunca doğal olarak.

Sonunda ne elde ederiz? Göz, başın dönüşünün biraz gerisinde, böylece sağa dönüp size baktığı bir etki yaratıyor. Sonuç olarak, işte bu kadar küçük bir matematik projesi.

sokma BURADA. İlginiz için teşekkürler. Yakında görüşürüz!
Yazarın videosu: