


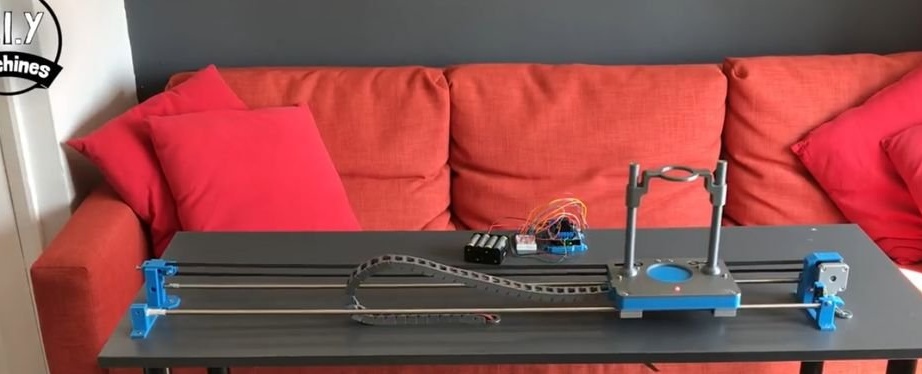
Bu makalede, Sihirbaz bize bir akıllı telefon tarafından kontrol edilen robotik bir barmen nasıl yaptığını anlatacak.
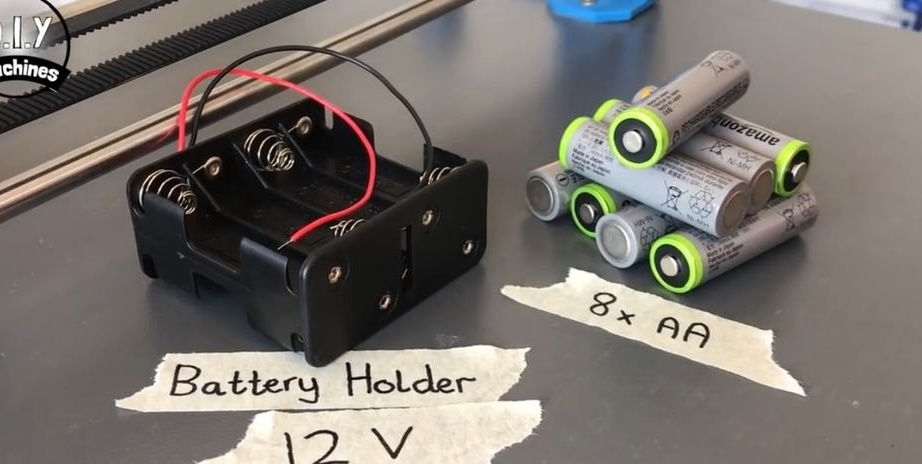
Cihazın özellikleri: Arduino üzerinde çalışmak, uygun fiyat, herhangi bir cihazdan bluetooth kontrolü, özerklik (8 AA pilden çalışma).
Böyle bir cihaz oluşturmak için usta aşağıdakileri kullandı
Malzemeler ve araçlar:
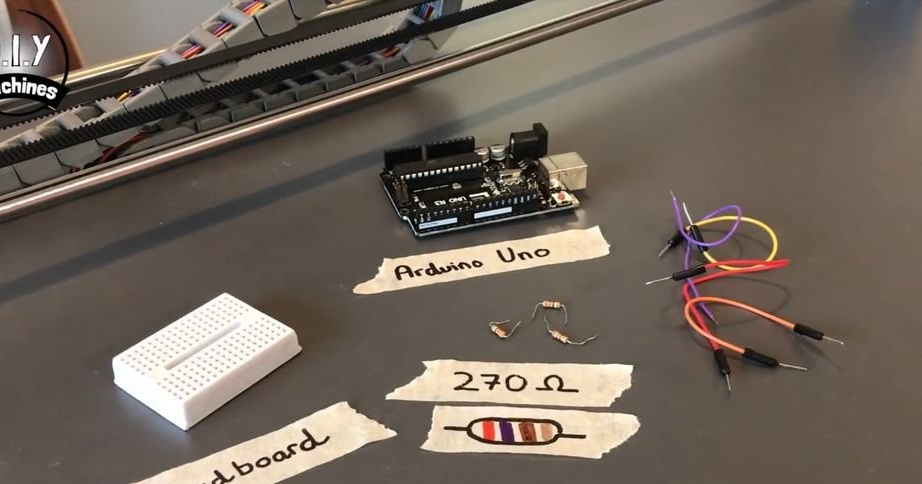
-Arduino uno;
-Sürücü motoru L293D;
- kontak anahtarı;
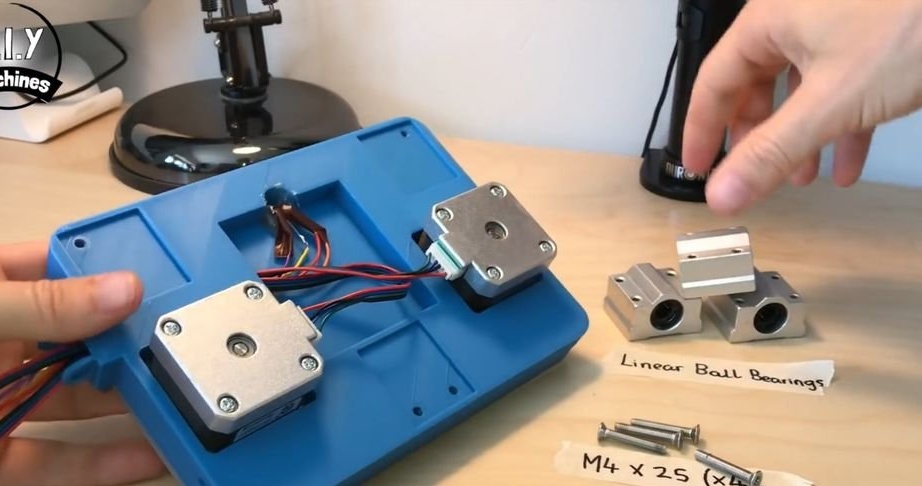
-Lineer rulmanlar;
-Adım motoru;
Kayış ve kasnak (versiyon 2m);
Kayış ve kasnak (versiyon 5m);
-HM10 Bluetooth modülü;
-Bir tornavida;
-Krepezh;
-Nozhki;
-Tablo üstü;
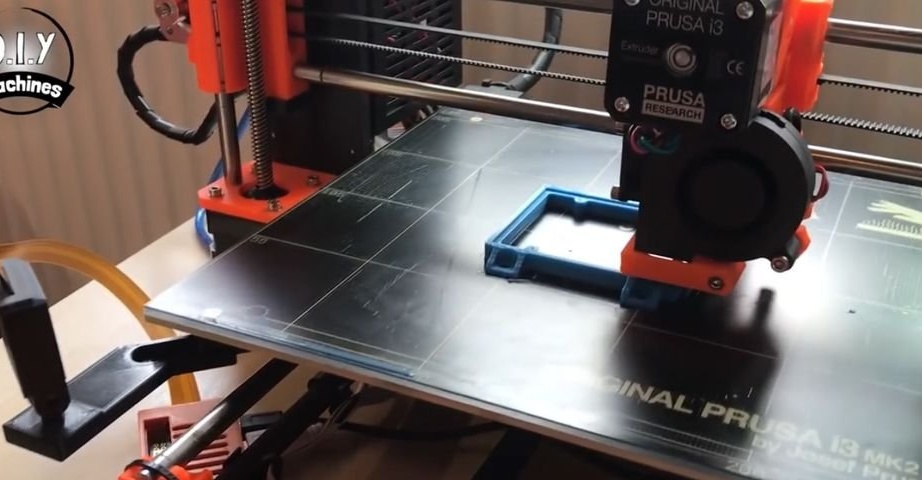
-3D yazıcı;
-Metal çubuklar;
- tornavida;
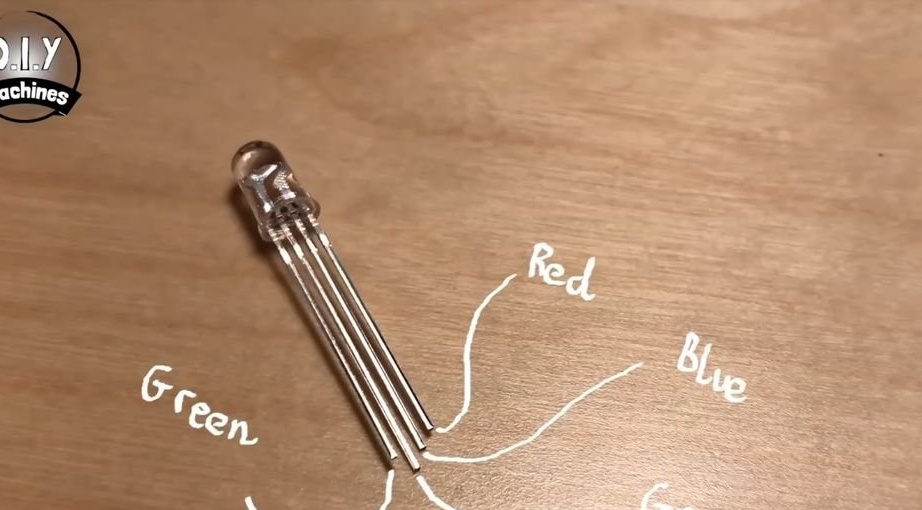
- RGB LED;
seeing-;
Lehimleme aksesuarları;
-Izolenta;
-Tutkal tabancası;
-Pil bölmesi;
-Konnektory;
Düğme tipi pil;
-Bilgisayarlı bilgisayar;
- Şişeler için tutucular;
-The valf;
-Bottle;
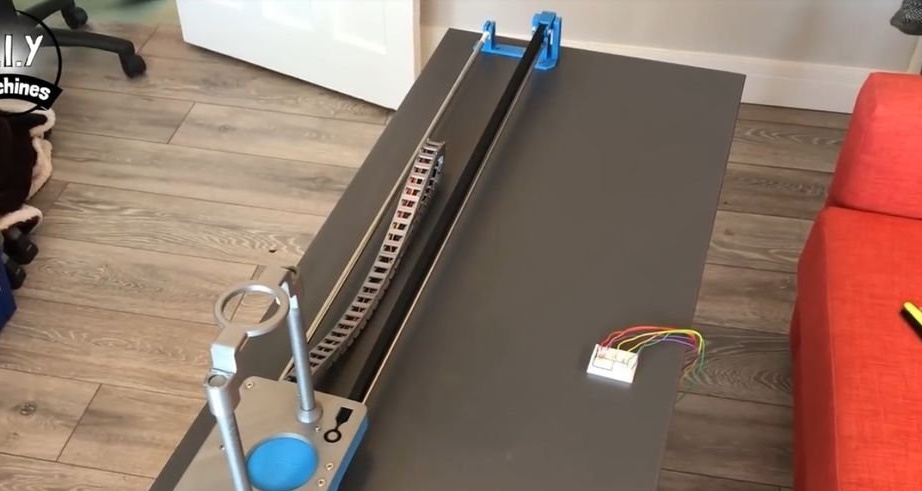
Birinci Adım: Tablo
İlk olarak, usta masayı toplar. Masa ebadı 120 * 45 cm Masa tablası kalınlığı 18 mm.


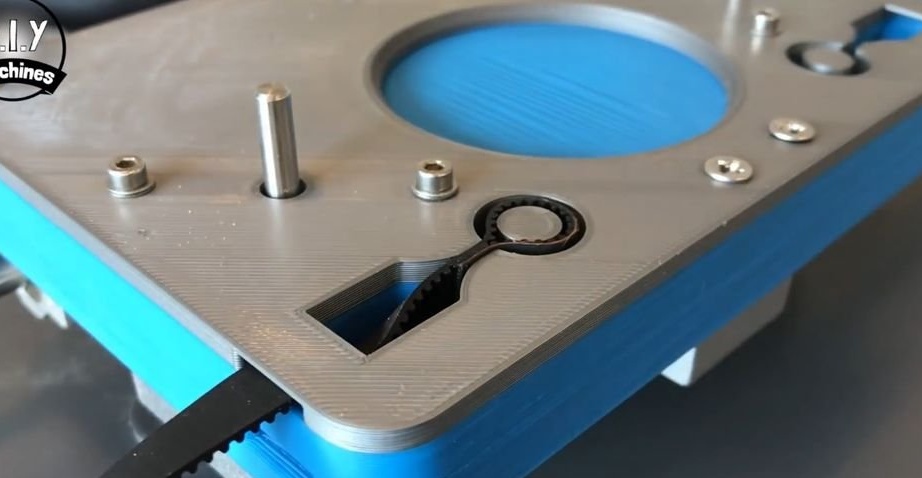
İkinci Adım: Gergi
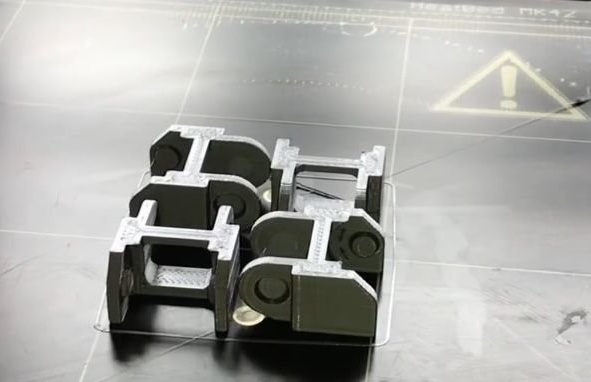
Baskı parçaları için dosyalar aşağıdan indirilebilir.
3D Baskı Dosyaları.
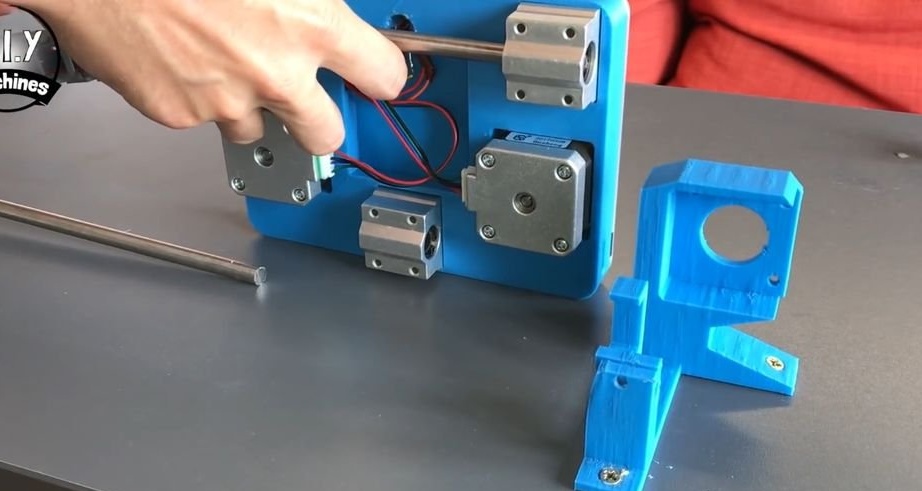
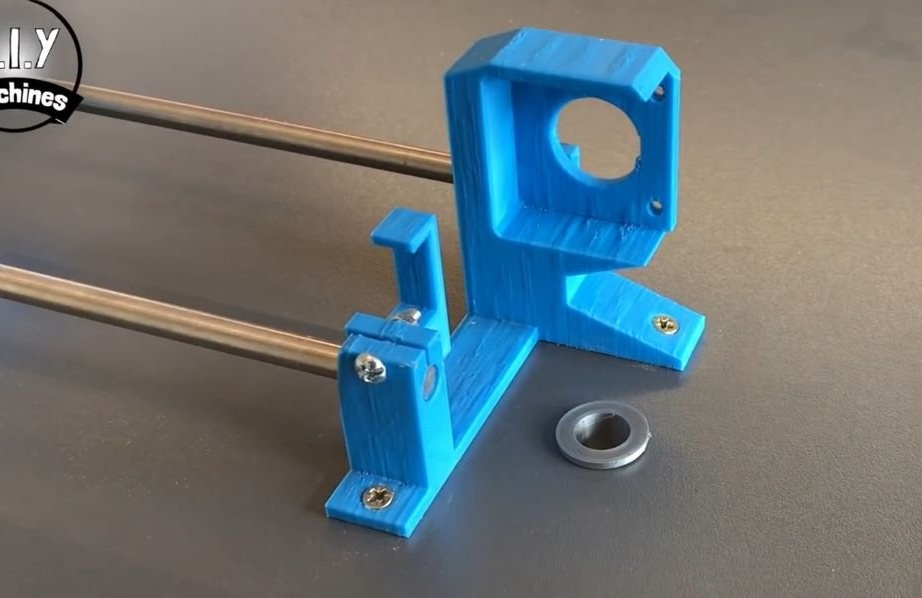
Şimdi ilk iki ayrıntıyı “idler.stl” ve “Rod_Clamp_V5.stl” yazdırmak gerekecektir.
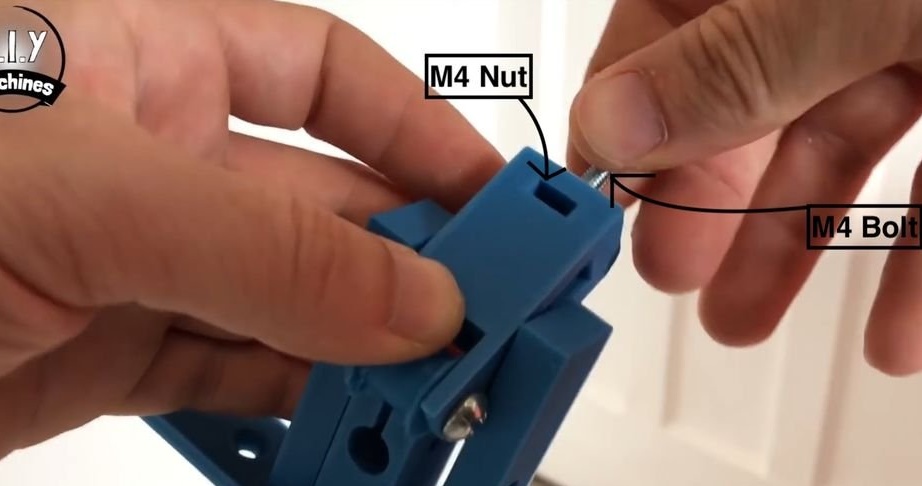
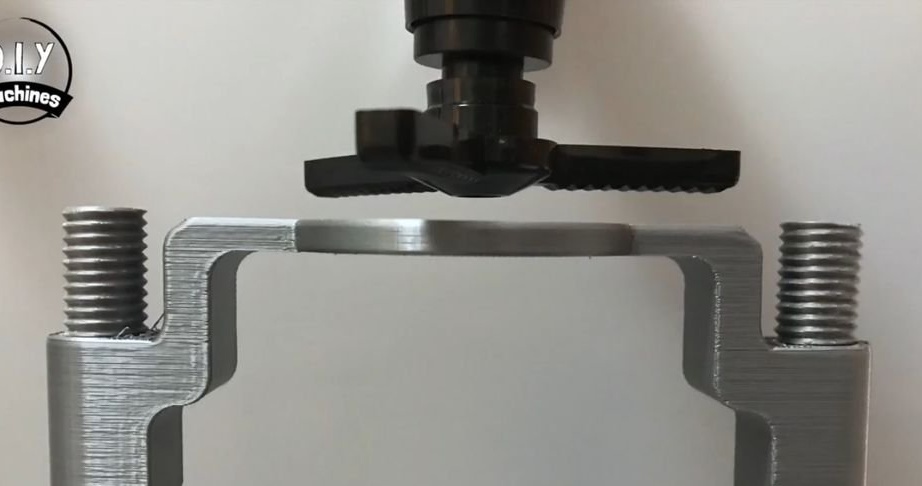
Yazdırmadan sonra, uzun bir M4 cıvatası ve somunu kullanarak gergi makarasını mil kelepçesine takmak gerekir. Silindirin serbestçe dönmesi gerektiğinden, güçlü sıkıştırma gerekli değildir.
Sonra iki parça birbirine bağlanır.
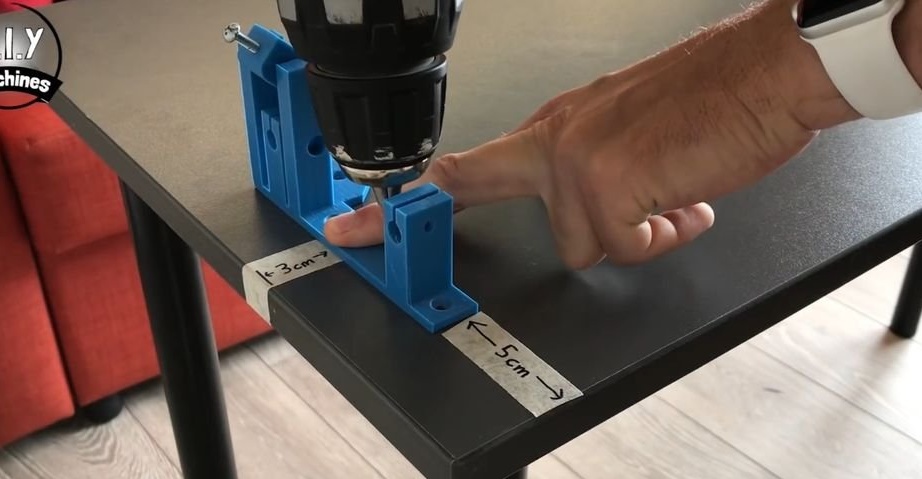
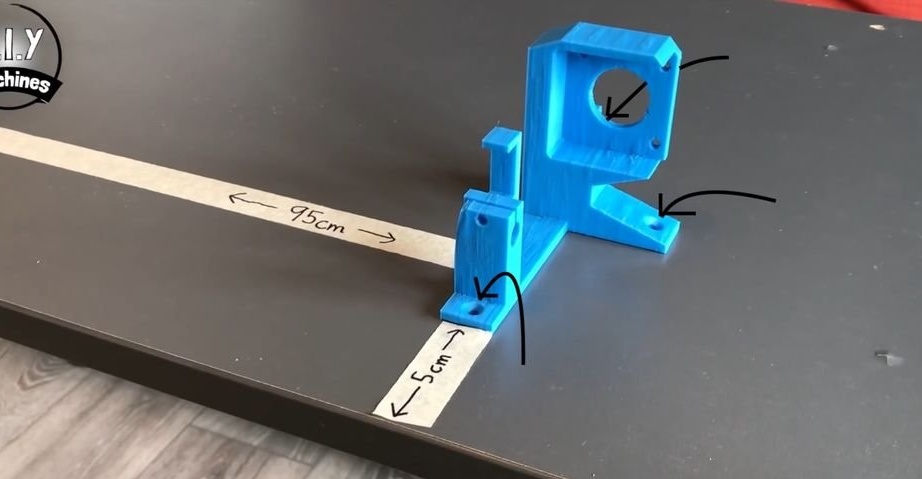
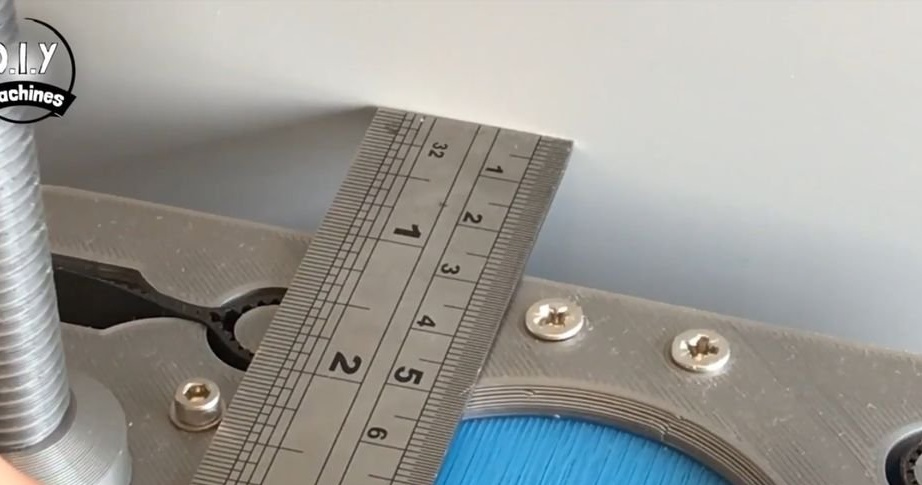
Sol kısa uçtan 3 cm ve ön kenardan 5 cm uzakta bir masaya işaretler ve gergiyi sıkın.

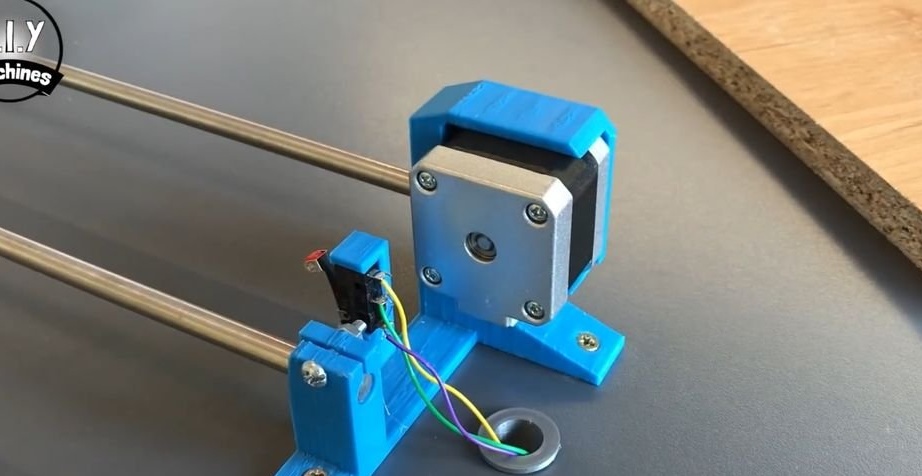
İkinci Adım: Motor Takozu
Motor yatağını, "X_Axis_Motor_Mount.stl" dosyasını yazdırır. Masanın üstüne gericiden 95 cm ve masanın kenarından 5 cm mesafede sabitleyin.
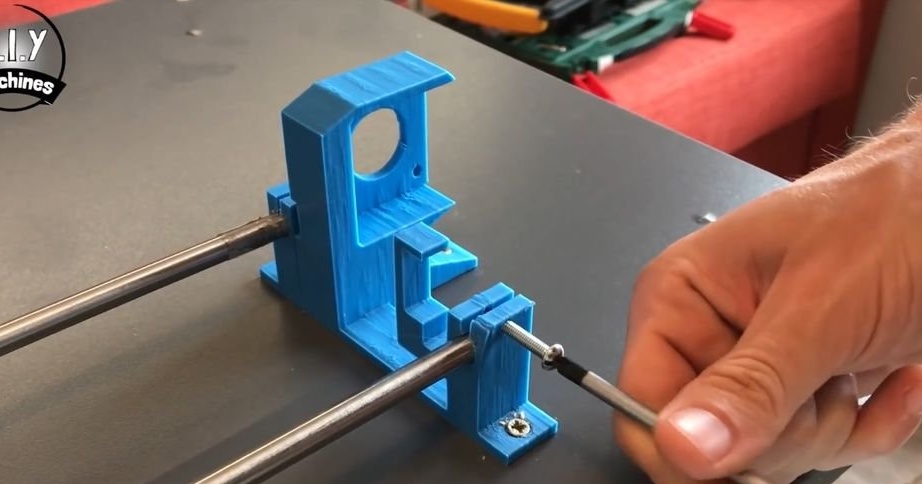
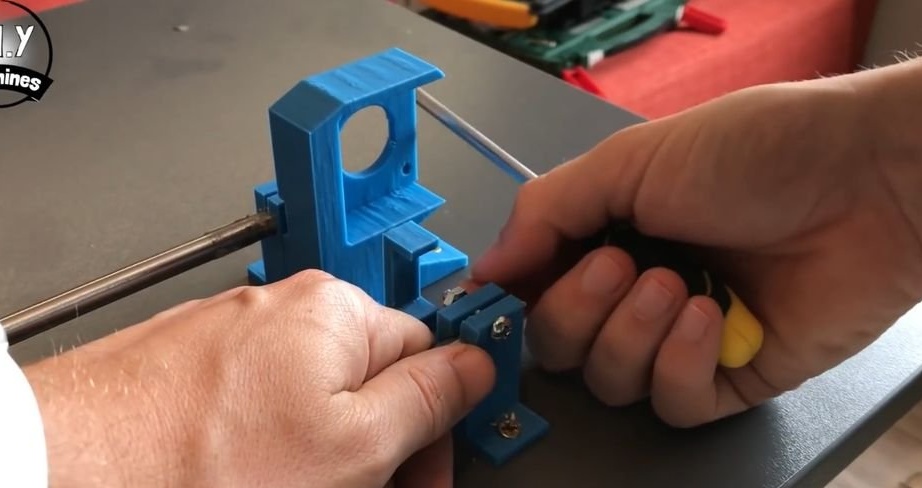
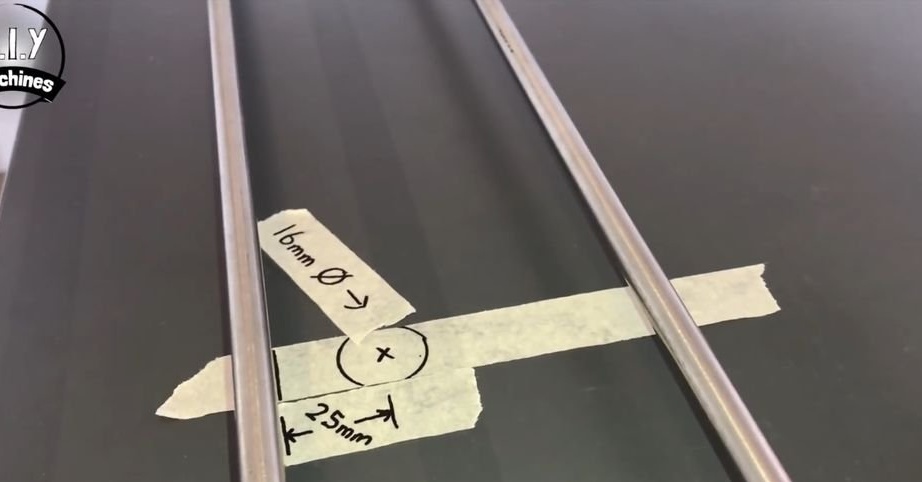
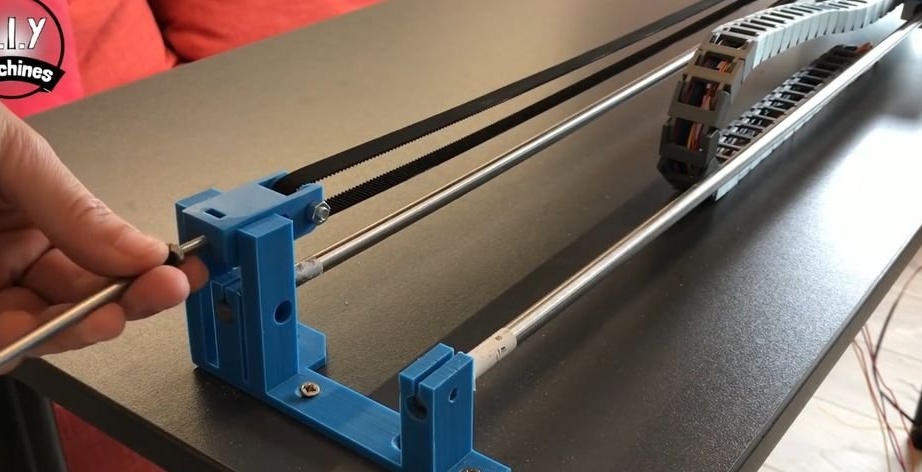
Üçüncü Adım: Kılavuzlar
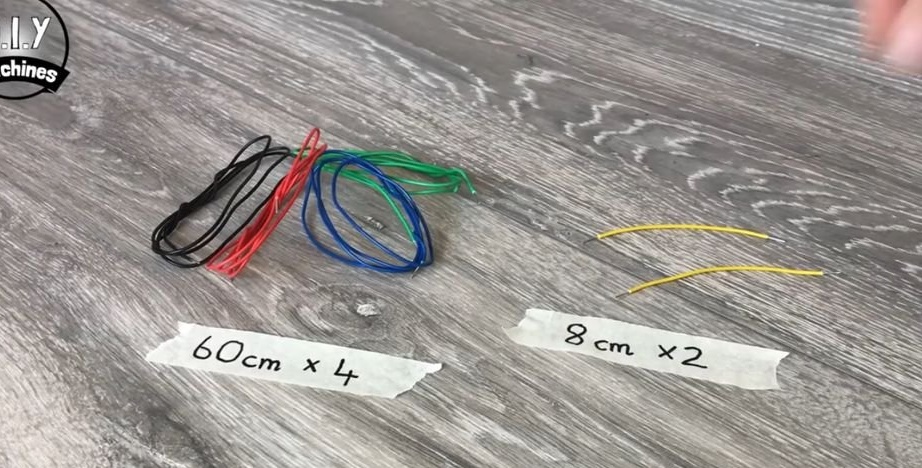
Kılavuzları ayarlar. Çubukların uzunluğu 1 metredir.
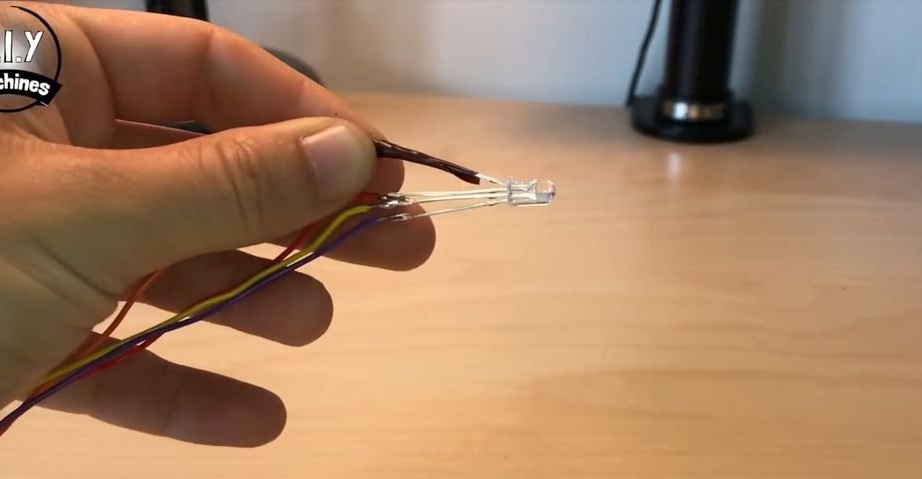
Dördüncü Adım: LED
Master gösterge için RGB LED'i kullanacaktır. Her bacağa farklı renklerde 180 cm teller lehimleyin. Kavşak yalıtır.




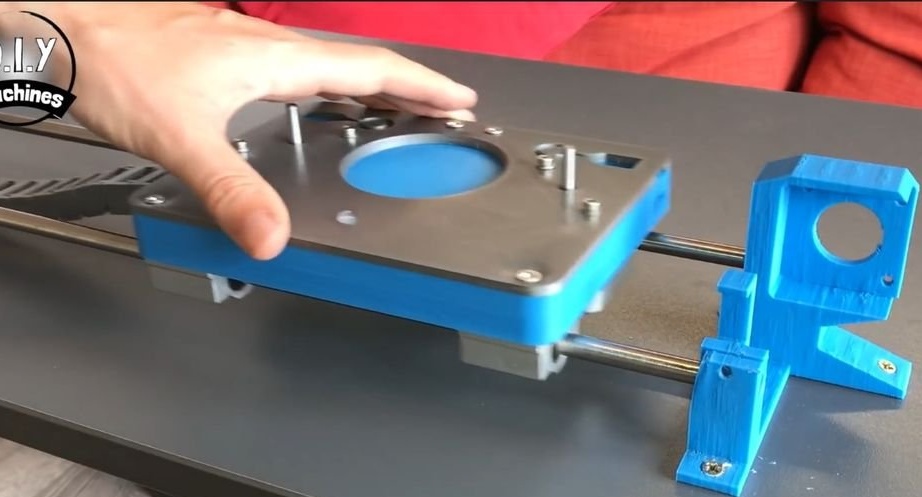
Beşinci Adım: Platform
'Slider_base_v3.stl' bölümünü yazdırır. Bir LED'i düzeltir. Step motorları monte eder.
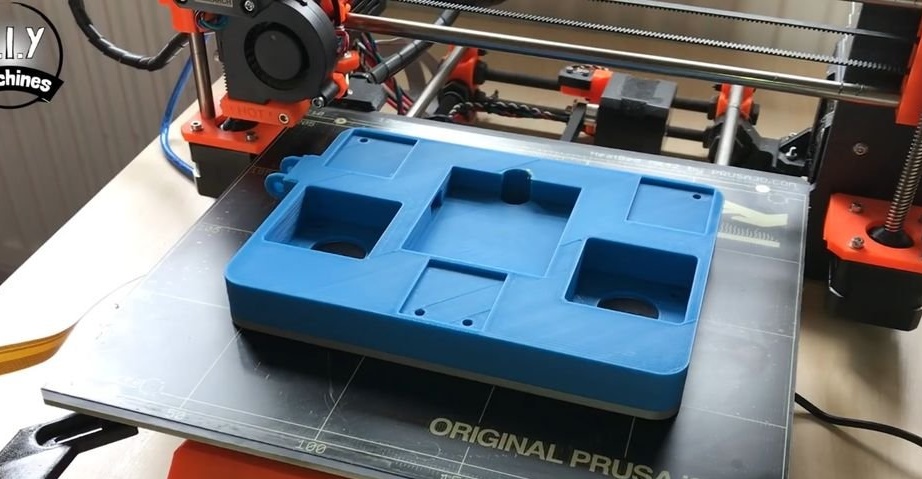

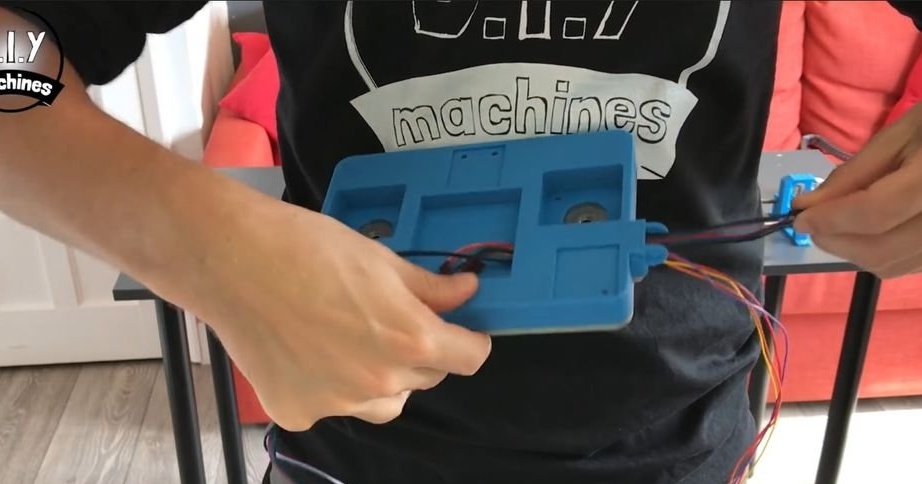
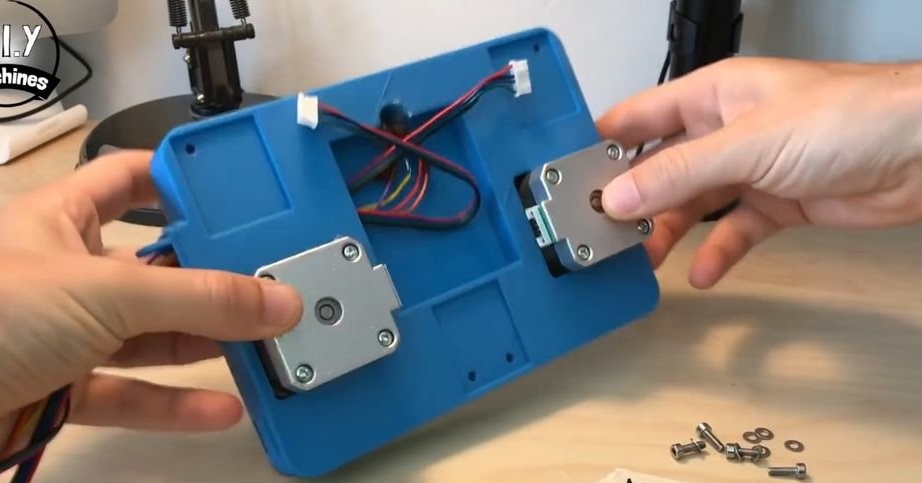
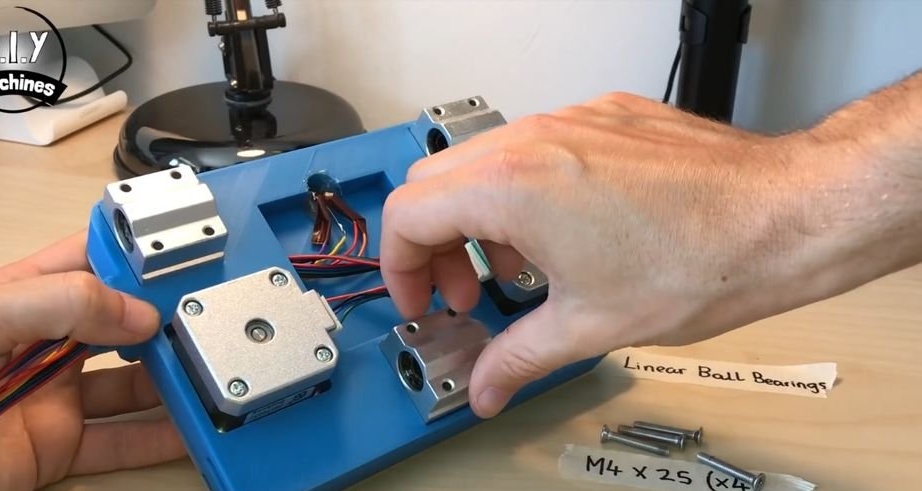
Lineer yatakları monte eder.
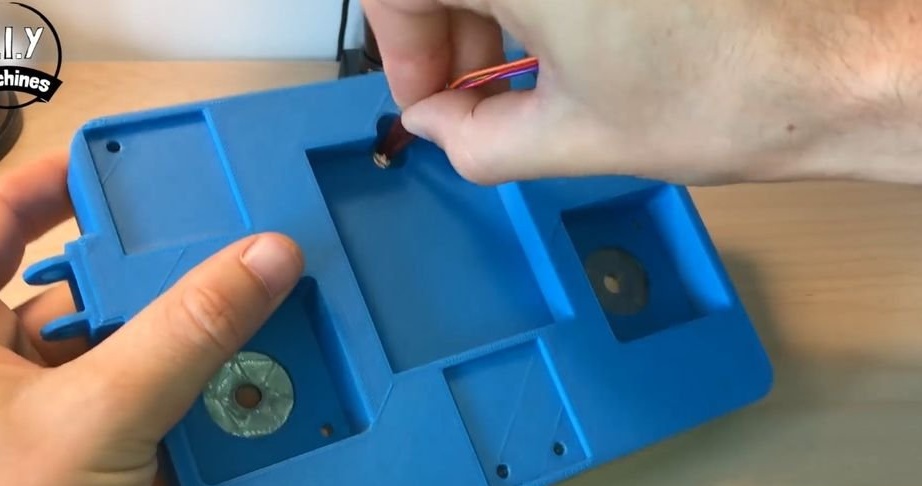
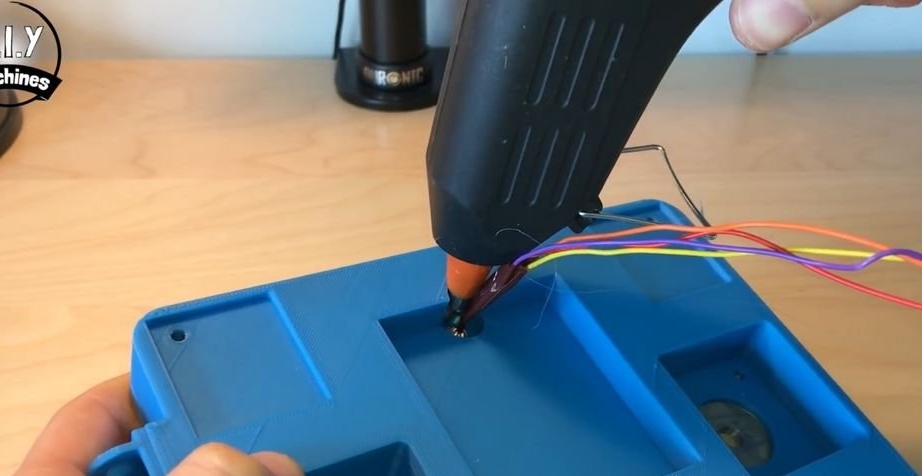
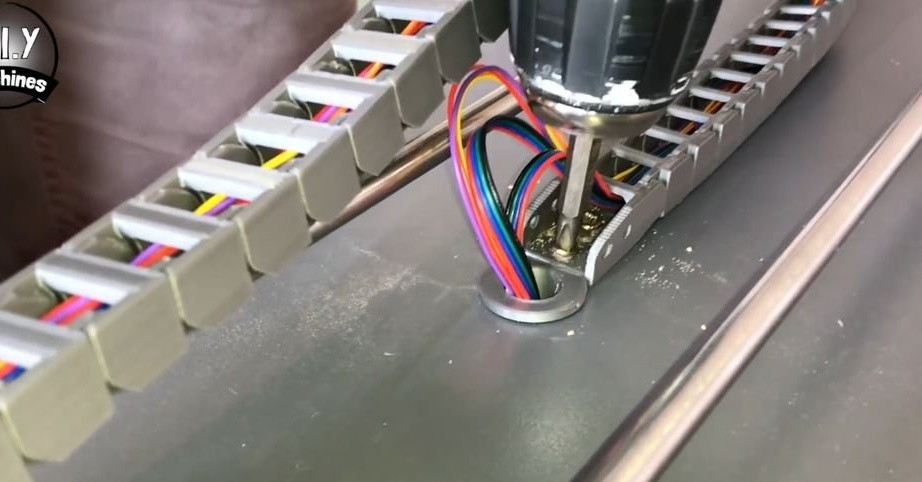
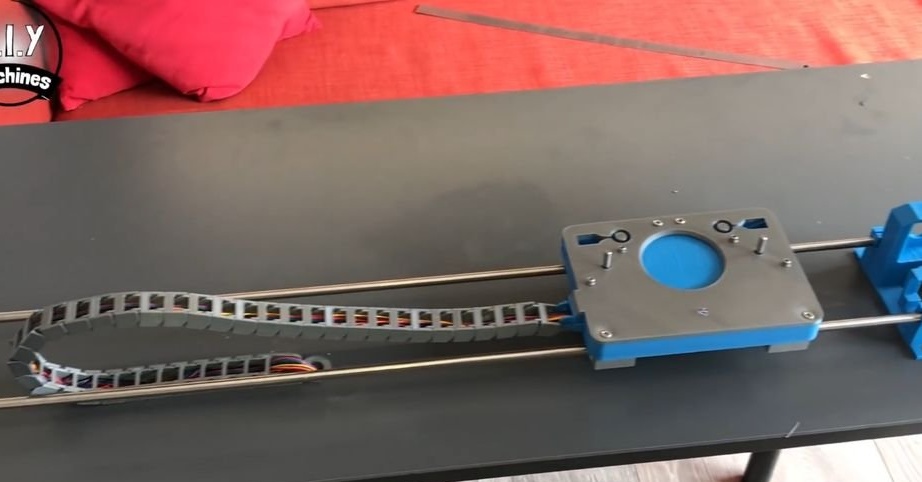
Altıncı Adım: Kablo Kanalı
Cihazın kablo kanalı, tek bir devreye bağlı ayrı segmentlerden oluşur.Devrenin içine teller döşenir. Zincir hareketlidir ve gerekirse bükülür. Zincir segmentleri de yazıcıda yazdırılır.


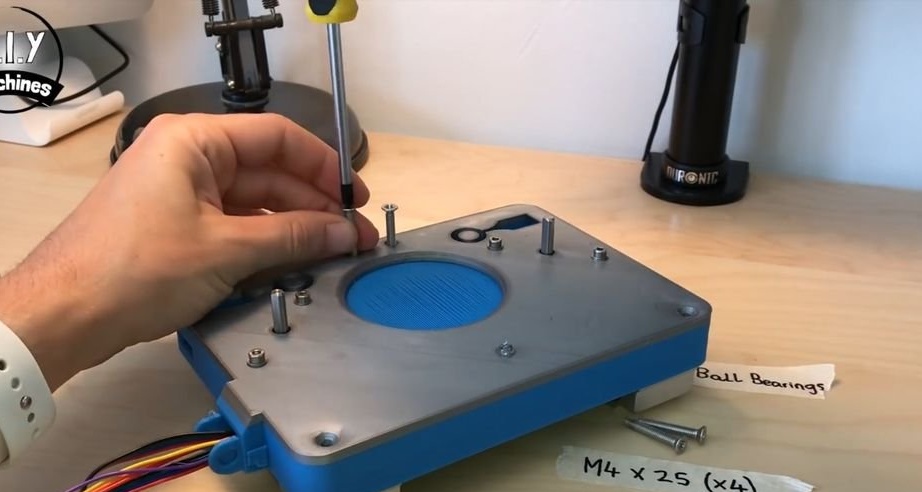
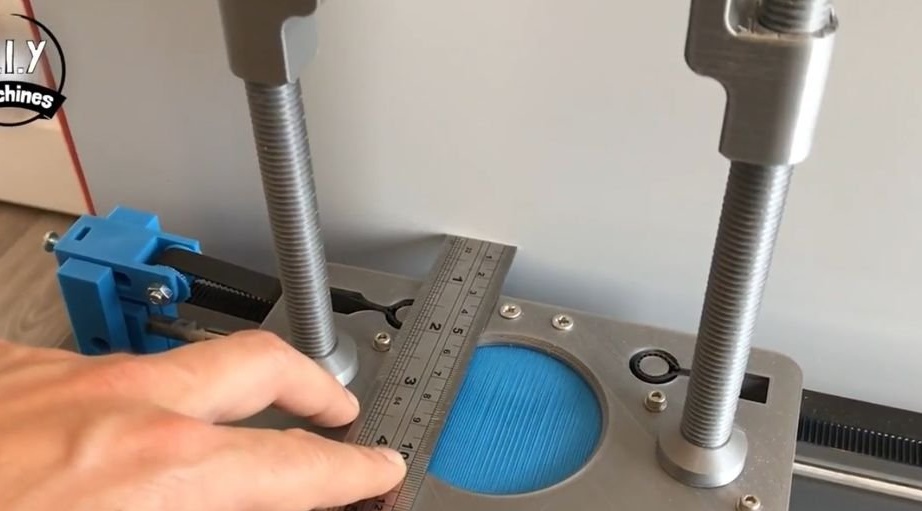
Aşırı kılavuzdan 25 mm ve gergiden 47 cm mesafede 16 mm'lik bir delik açar. Manşonu "Table_Tidy.STL" deliğe ekler. Kablo kanalını platformun bir ucunu platformda ikinci ucunu manşonun yanında sabitler. Telleri uzatır.



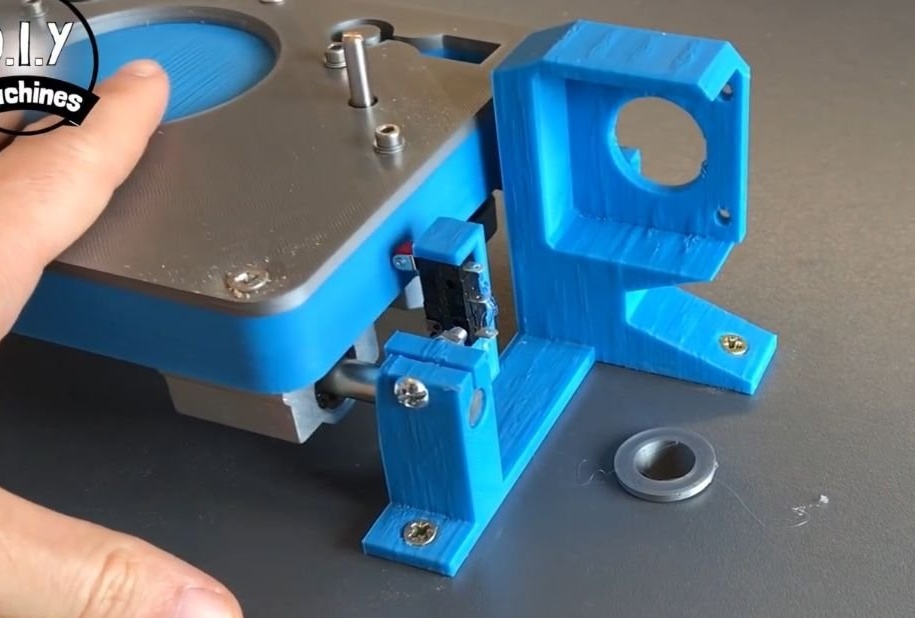
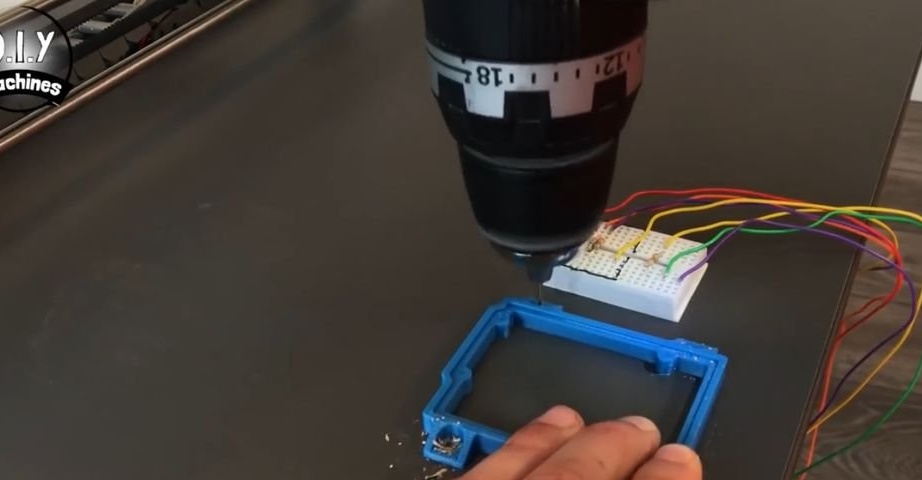
Yedinci adım: anahtar
Motor yatağının yanında 16 mm'lik bir delik daha açılır. İçine bir manşon ekler. Römorku kaideye sabitler. 1 metre tel için kontaklarına lehimleyin.

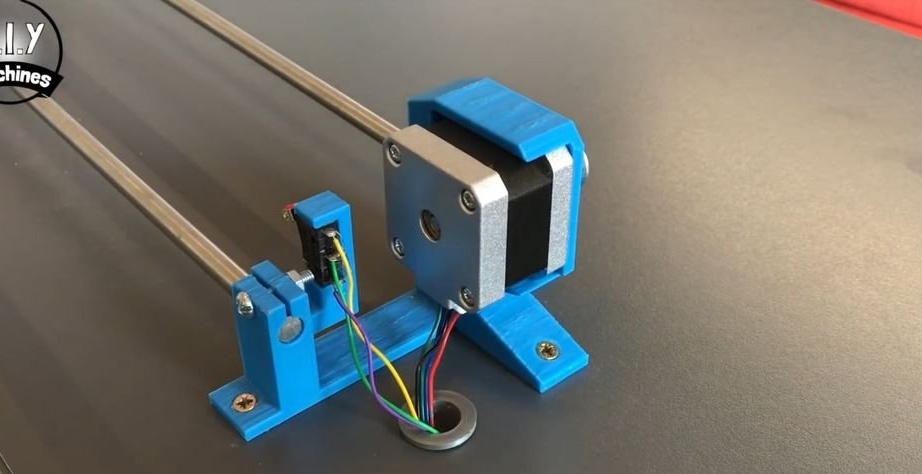
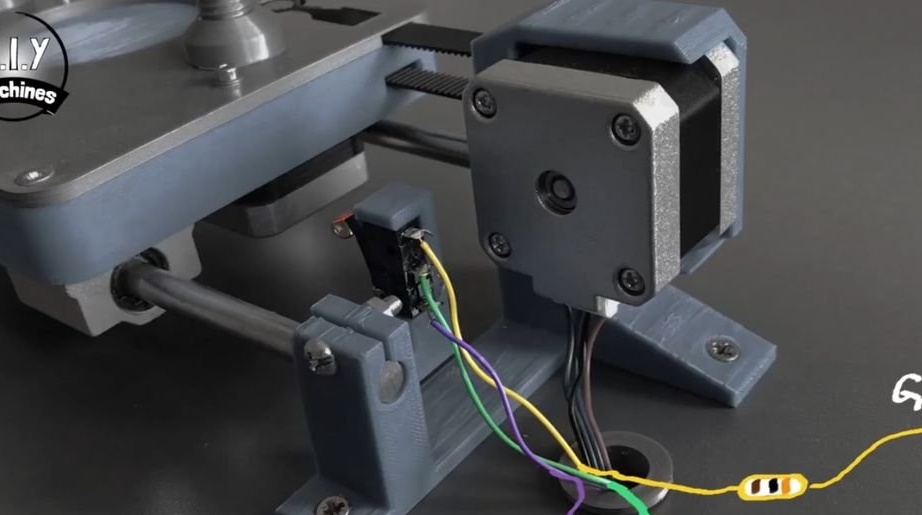
Sekizinci Adım: X ekseni motoru
Motoru montaja sabitler.

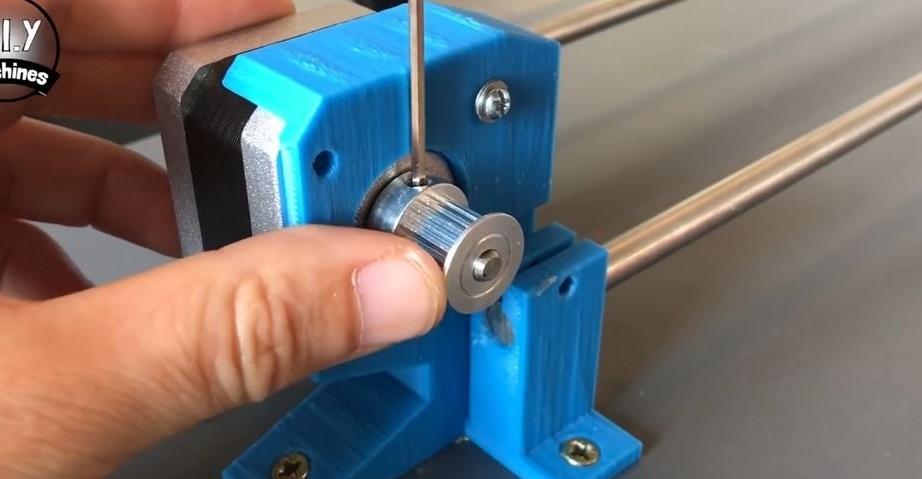
Dokuzuncu Adım: Kemer
Kasnağı motor miline sabitler. Kayışın ucunu platform tutuculara sabitler. Kayışı kasnaktan ve gergi kasnağından çeker. İkinci ucu tutuculara sabitler. Gerekirse, kayış gerginliği vidayı sıkarak veya gevşeterek ayarlanabilir.







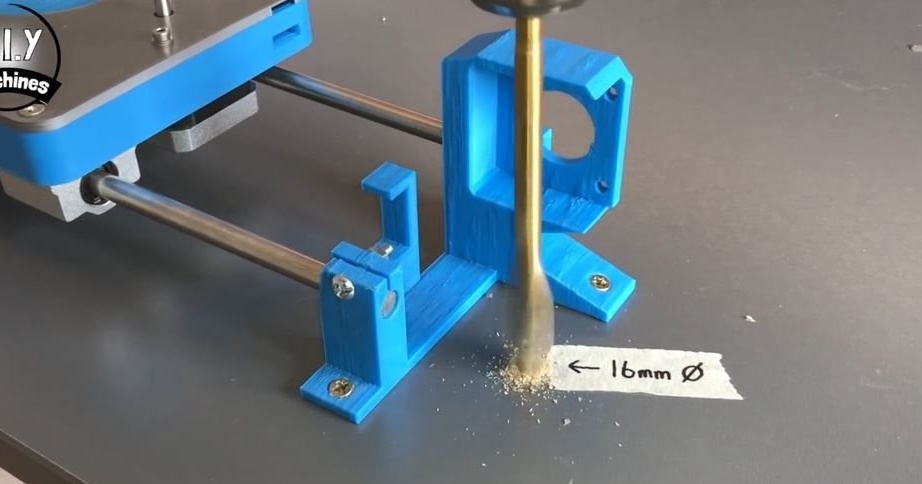
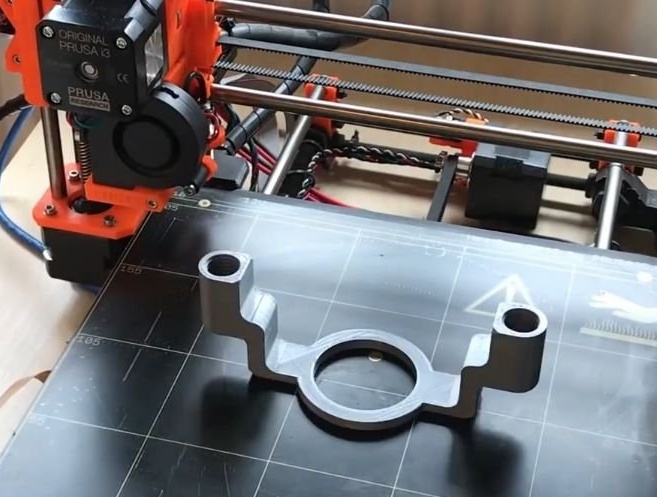
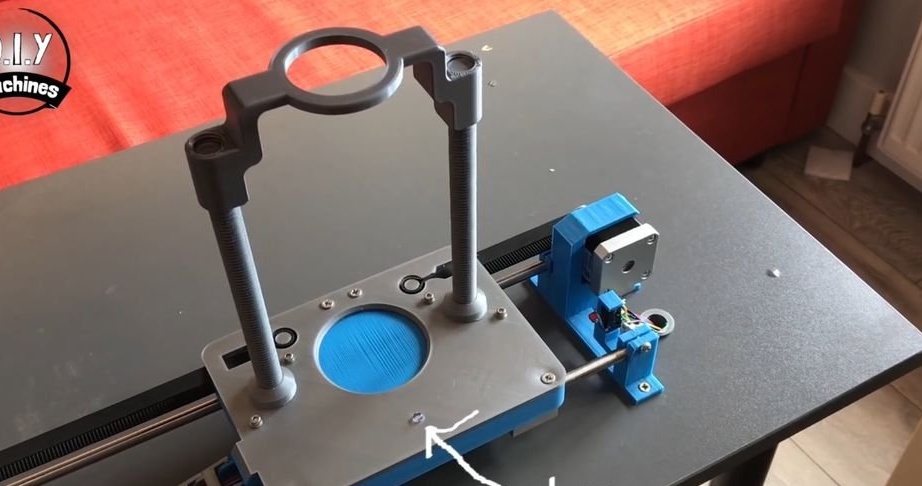
Onuncu Adım: Bardaklık
Main_rod2.3.STL ve tutucu Dispenser_Paddle_V2.STL olmak üzere iki dişli çubuk yazdırır. Bir platformda sabitlenir.



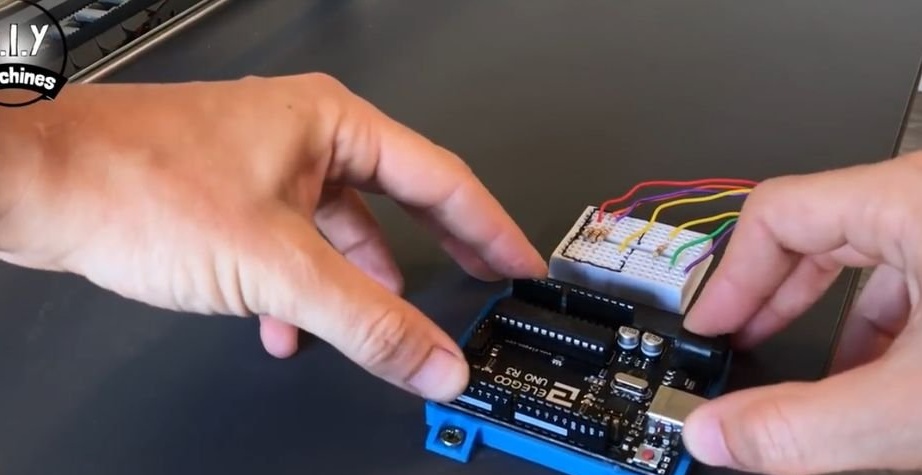
On birinci adım: gösterge, römork, breadboard
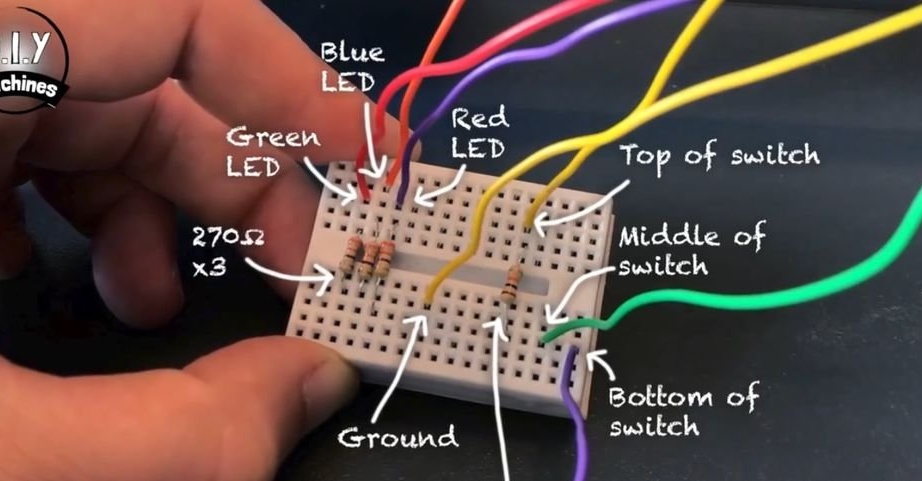
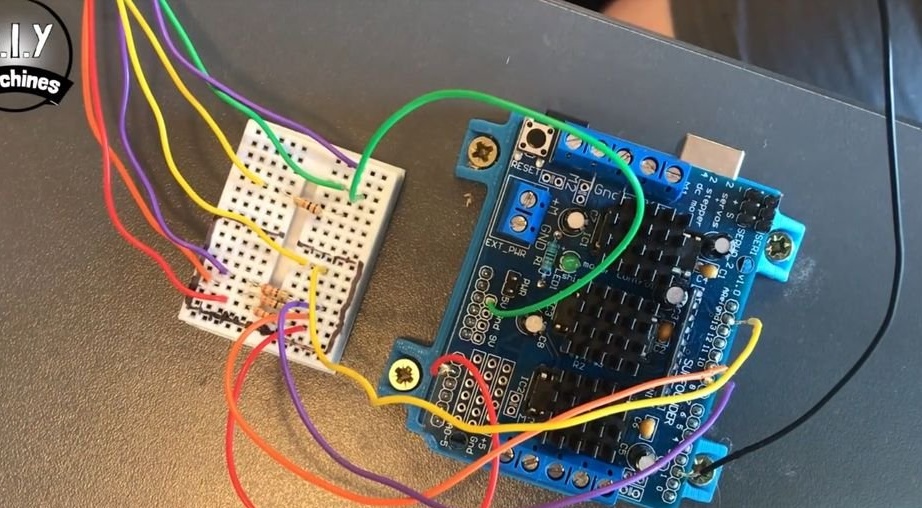
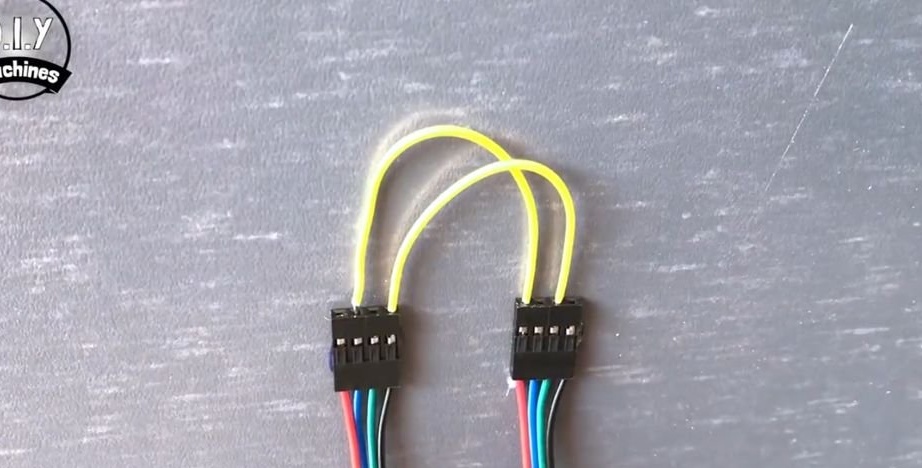
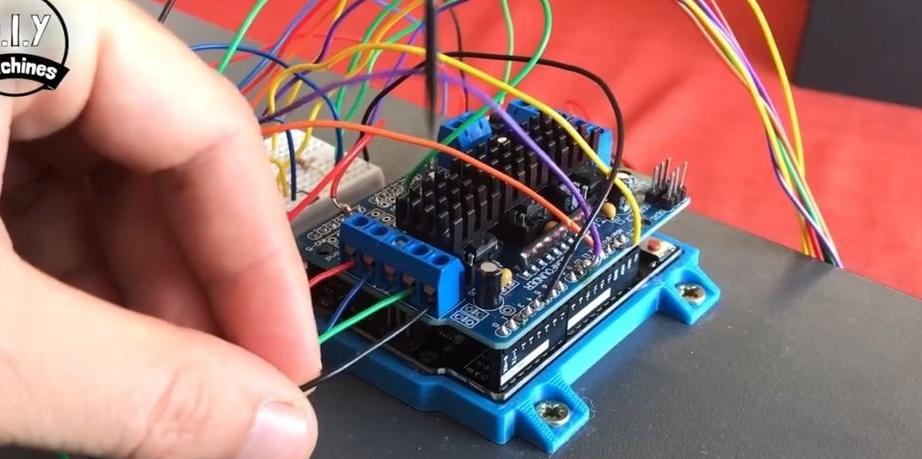
RGB LED, dört bacağı vardır. Bir bacak yaygın ve üç renklidir. Master, her biri yaklaşık 15 cm uzunluğunda dört tel daha alır ve bunları (LED ışığının renkleri ile) motor sürücü modülüne lehimler:
D9'u sabitlemek için kırmızı
D10'u sabitlemek için mavi
A1 pinine yeşil
GND pimine katot.
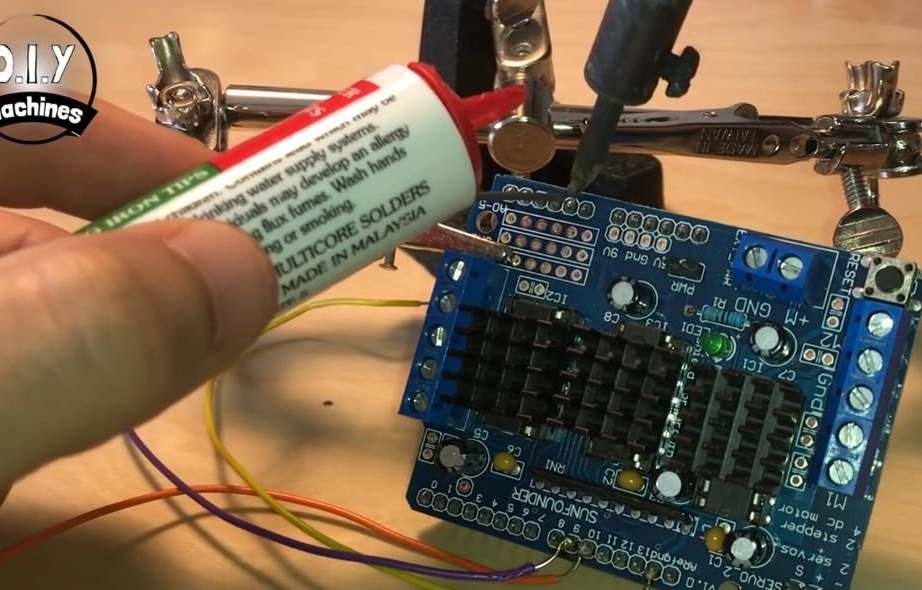
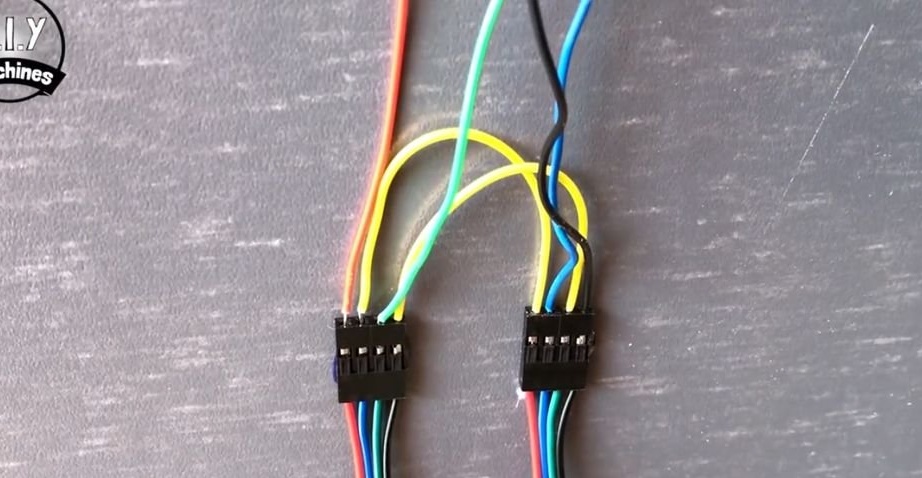
Römorku bağlar: üst kontak GND, orta kontak 5 V, alt kontak çıkış No. 2'dir.
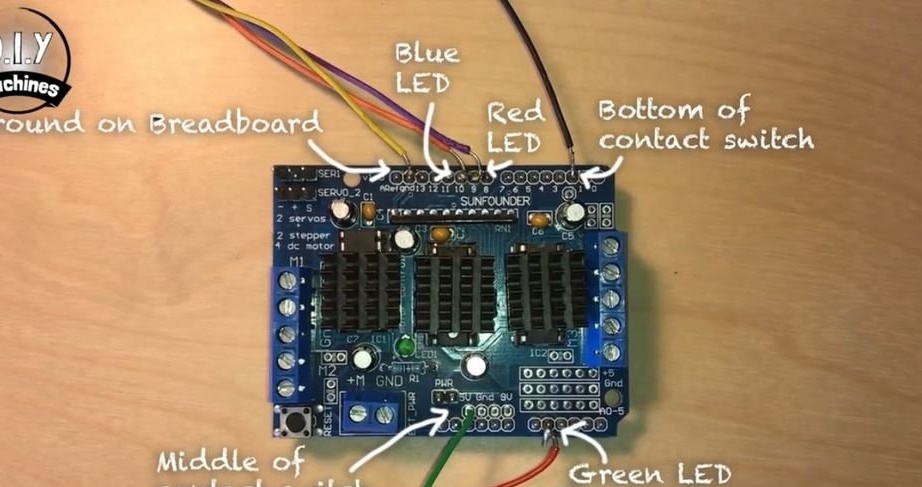
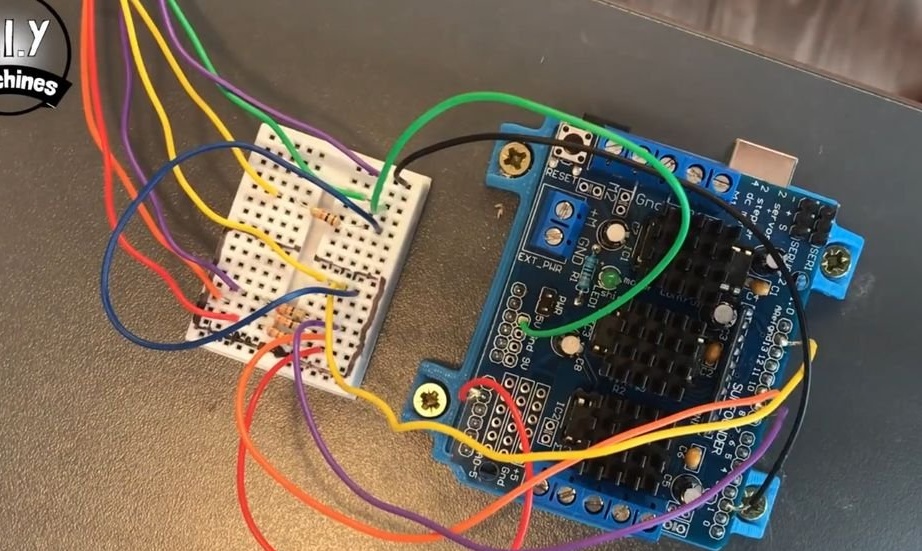
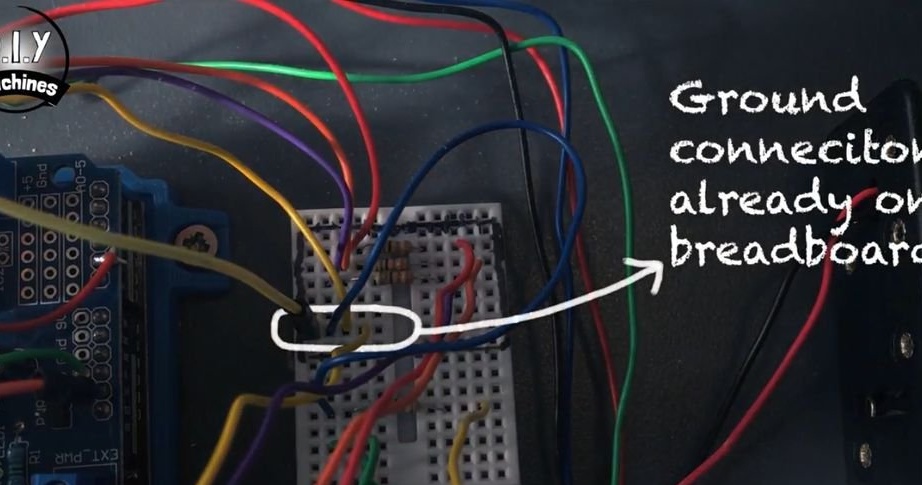
Sonra her şeyi bir breadboard üzerine monte eder (fotoğrafa bakın). Tahtayı masaya sabitler.
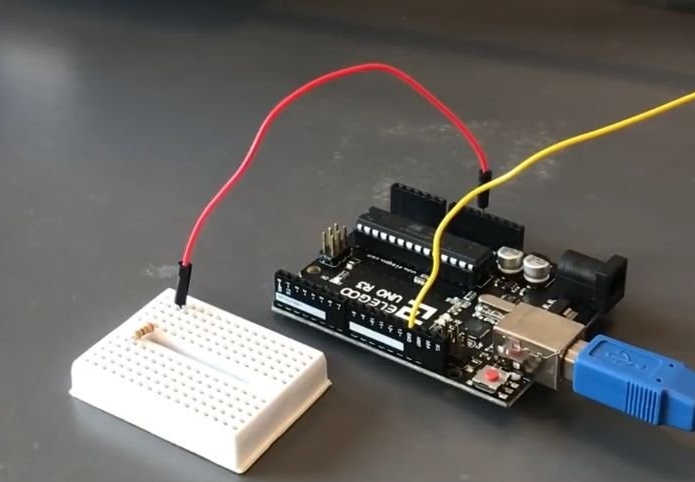
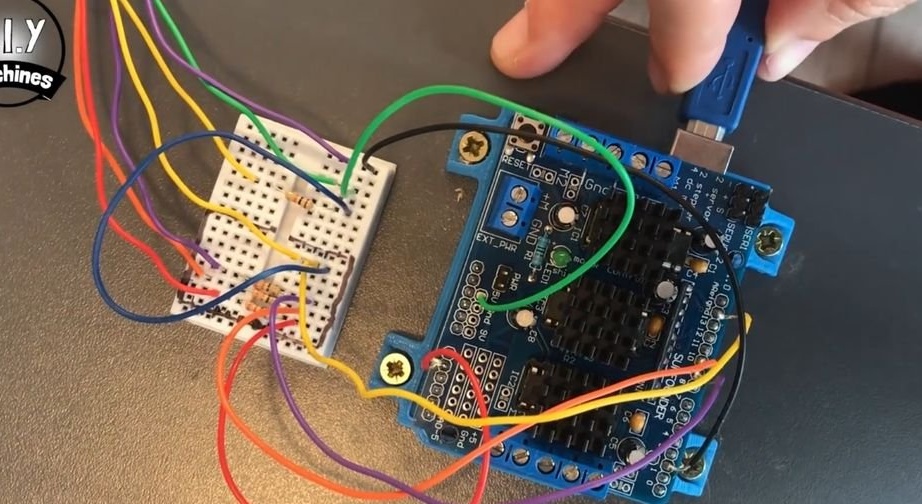
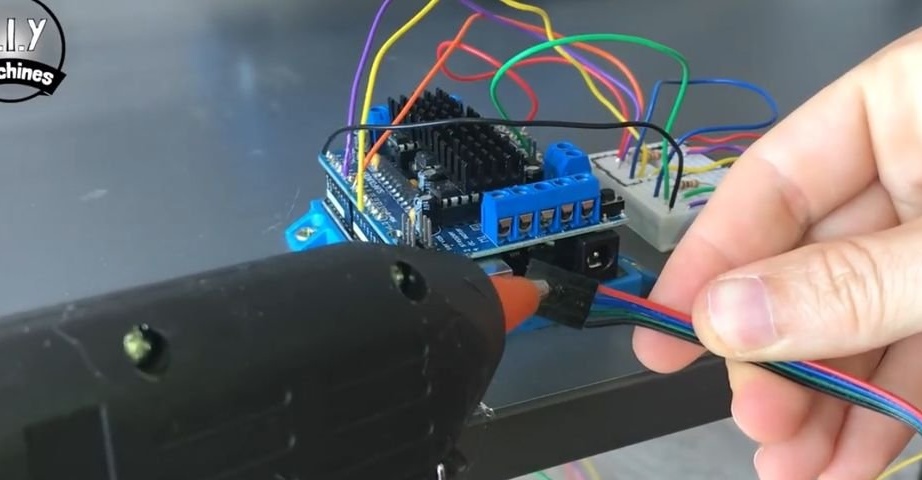
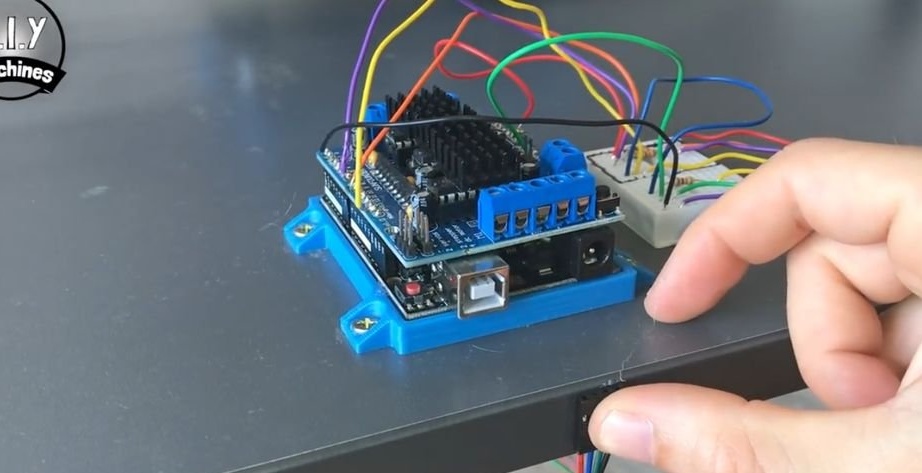
On İkinci Adım: Arduino
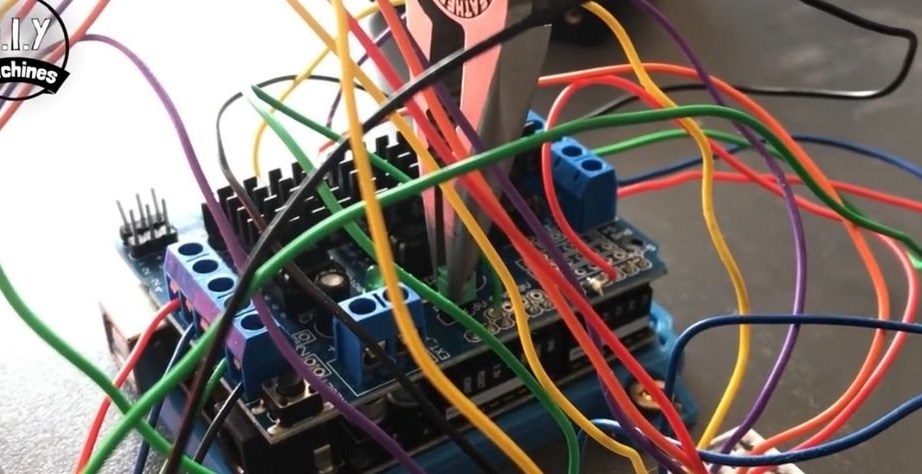
Arduino için montaj plakasını yazdırır. Plakayı masaya sabitler. Arduino tabağına tutturulur. Arduino'ya bir motor sürücü modülü takar.
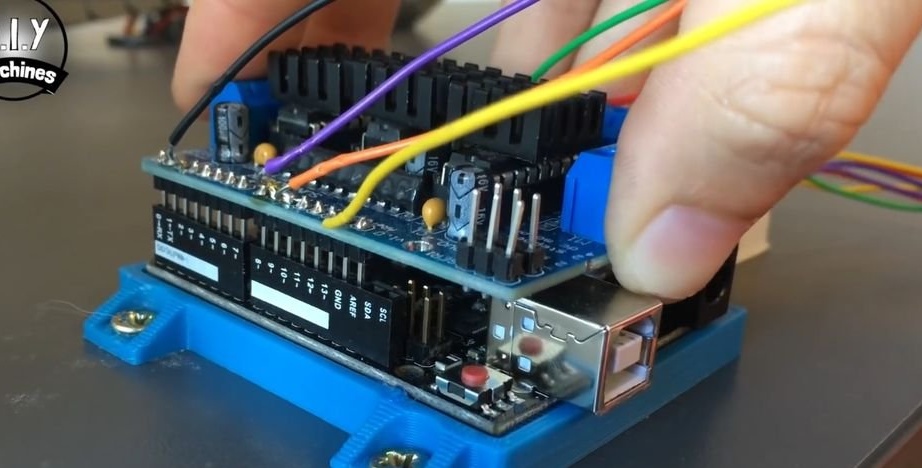
Fotoğraftaki gibi kabloları sürücüden breadboard'a bağlar.
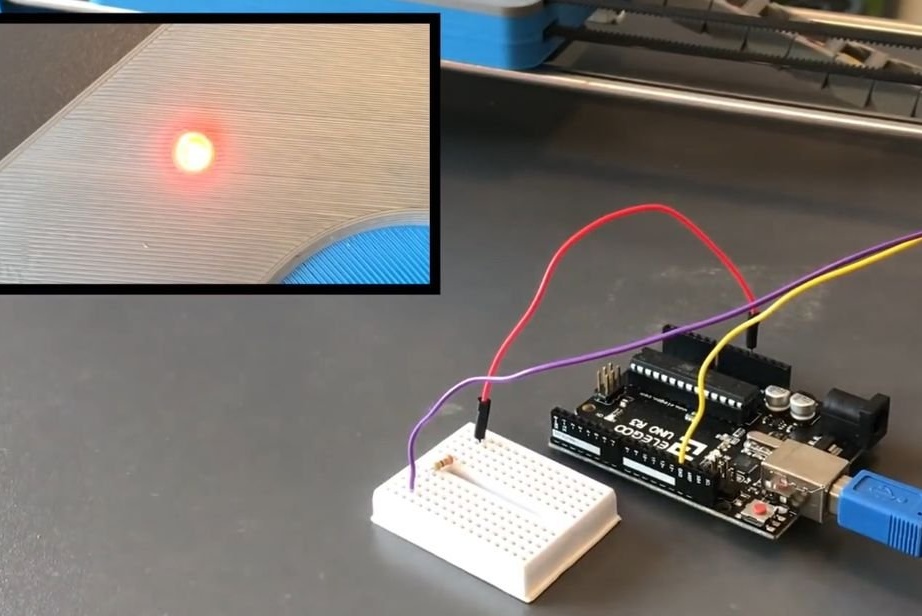
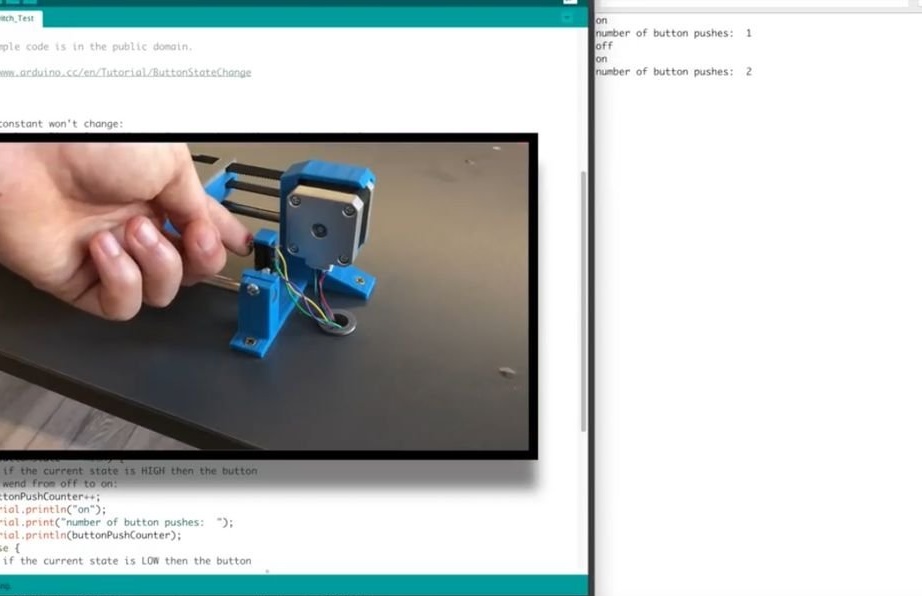
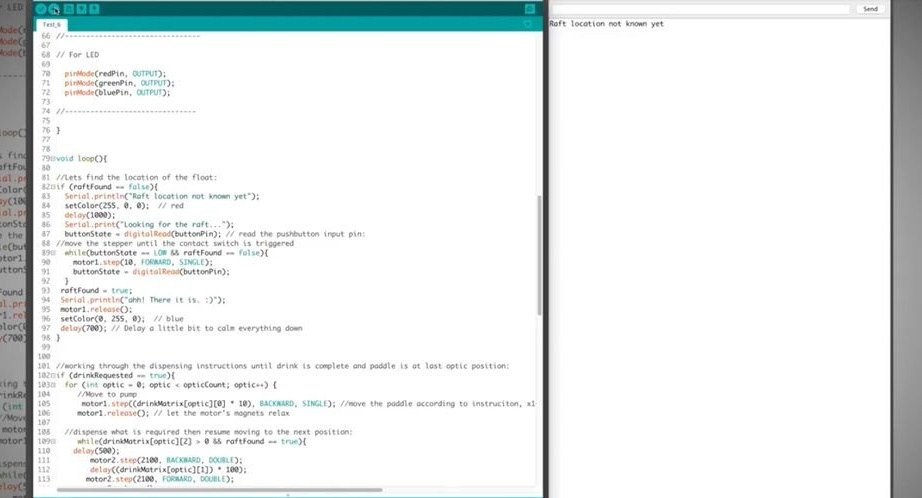
Onüçüncü Adım: İndirme Kodu
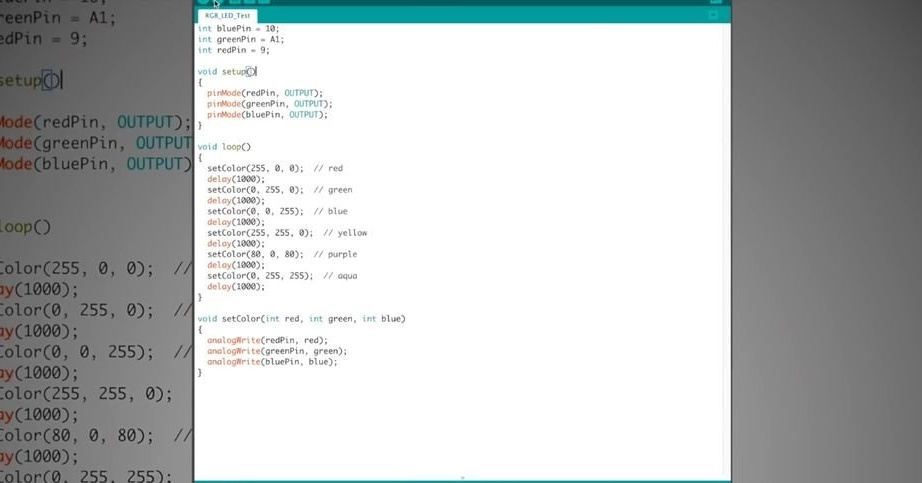
Arduino'yu bir PC'ye bağlar ve kodu indirir. Kod bulunabilir burada.
LED Test kodunu çalıştırır. LED farklı renklerde yanmalıdır.
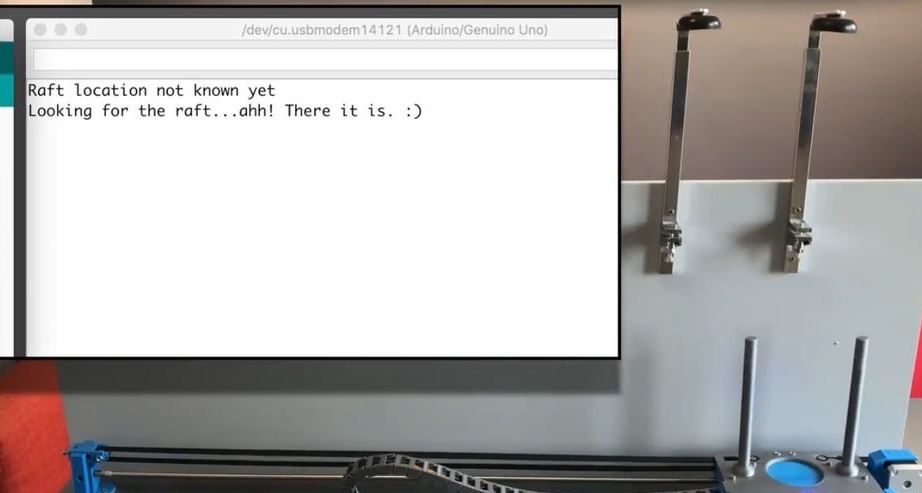
İndirmek için aşağıdaki komut dosyası "Contact_switch_test" dir. Yüklenir yüklenmez, limit anahtarına her basıldığında monitörde görüntülenmelidir.

On dördüncü adım: X ve Z motorlarının bağlanması
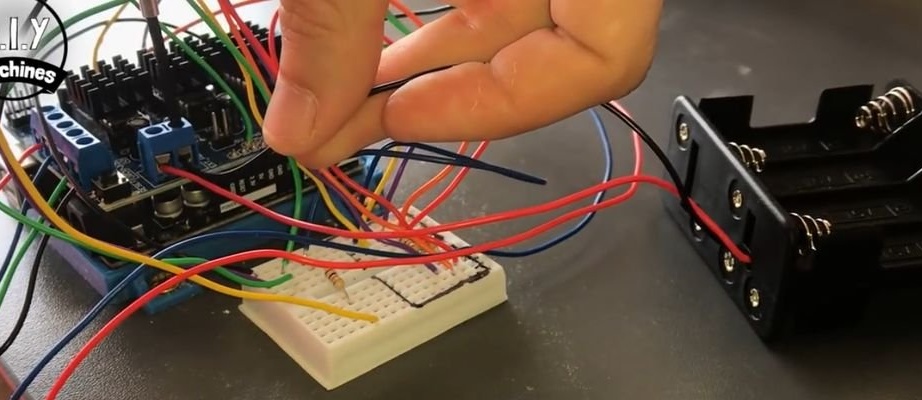
Motor X'dan gelen konnektörü masadaki breadboard üzerinden sabitler. Sürücü kablolarıyla bağlanır.
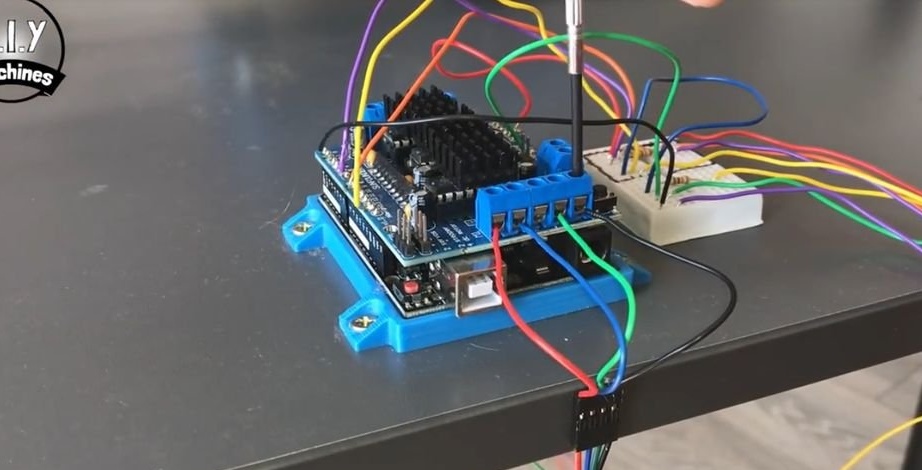
Z ekseni step motorlarını bağlar.
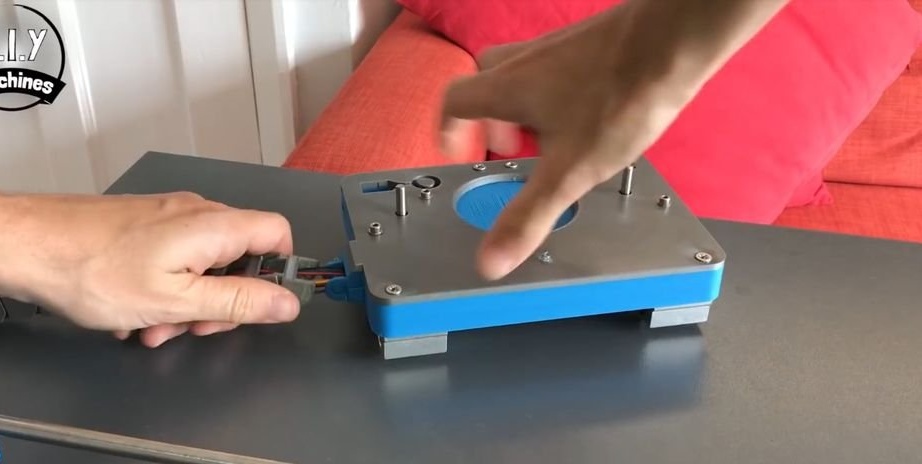
Onbeşinci Adım: Pil Bölmesi
Modüldeki bir atlama telini kaldırır. Pil bölmesini bağlar.
Şimdi "test 1" i çalıştırabilirsiniz. Kırmızı LED yanmalı ve platform limit anahtarına ulaşmalıdır. Ardından LED yeşile dönecektir.
On altıncı adım: şişe tutucular
Parantez kullanmak MDF'nin arka duvarını sabitler.




Platformu sınır anahtarından 1 cm daha hareket ettirir. Cam tutucuyu hizalar ve şişe tutucuyu dağıtıcı ile sabitler (maalesef master, tutucunun üretimi veya satın alınması için bir açıklama yapmadı). Sonraki. tutucular her 12 cm'de bir tutturulur.



On yedinci adım: kod, kalibrasyon, test
Ana kodu şurada yükler: https://www.thingiverse.com/thing:2478890
Aşağıdaki değerler ayarda ayarlanır: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Master altı dağıtıcıya sahiptir. Ayarlarda, ilk basamağın limit anahtarına, ilk dağıtıcıya, ikinci dağıtıcıya, vb. Olan mesafenin üç olduğu altı grup vardır, ikinci basamak, içeceğin bardağa döküldüğü zamandır, üçüncüsü dökülen sayıdır. Tüm bu değerler gerektiğinde değiştirilebilir.


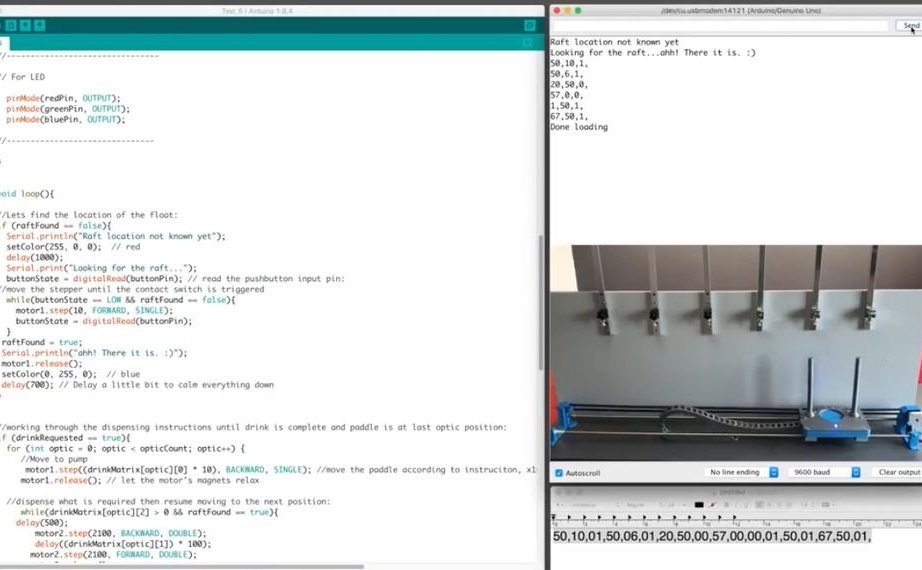
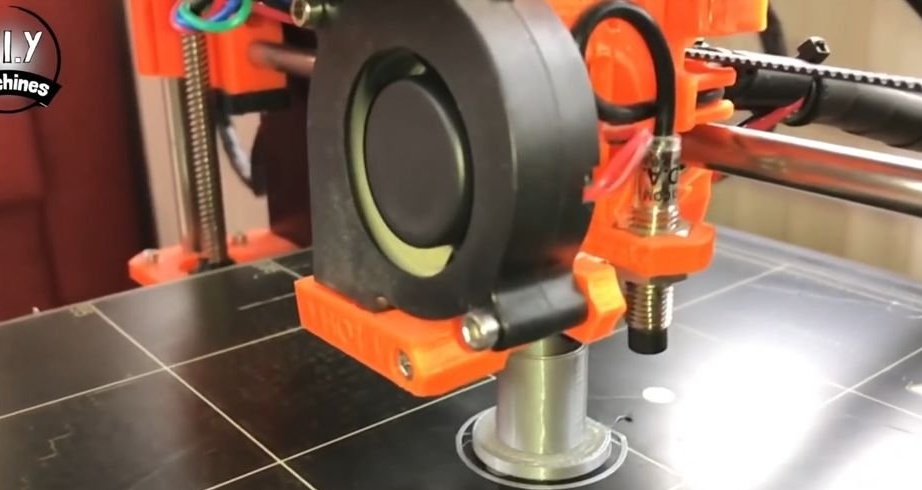
Cihazın hazırladığı ilk içecek cin ve kola idi. Şişedeki basıncı kola ile eşitlemek için bir delik açmanız gerekir. Ardından sihirbaz gerekli parametreleri ayarladı.



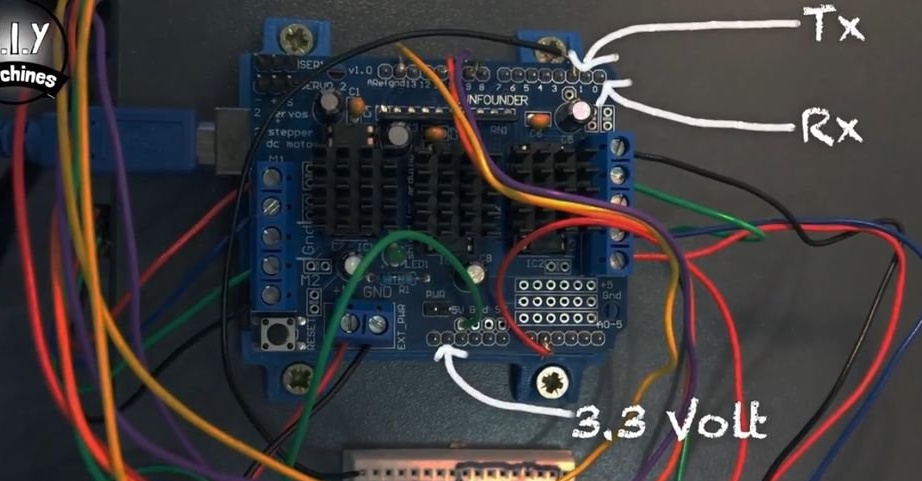
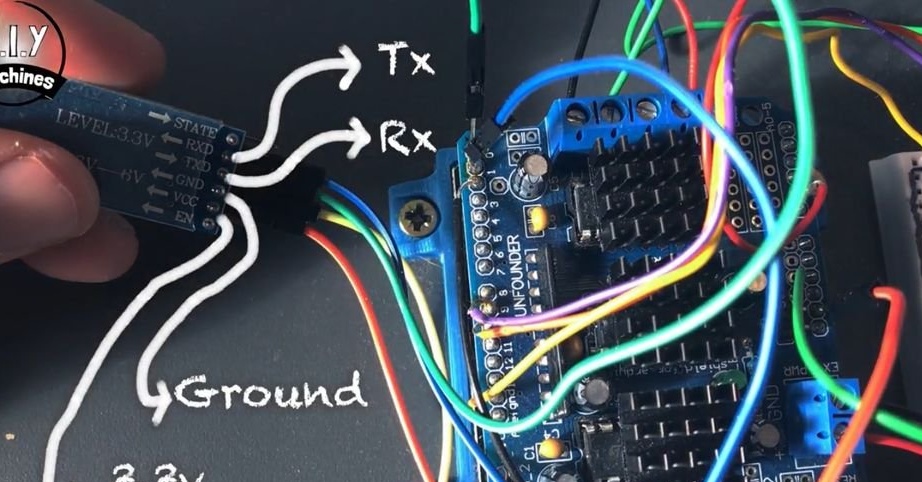
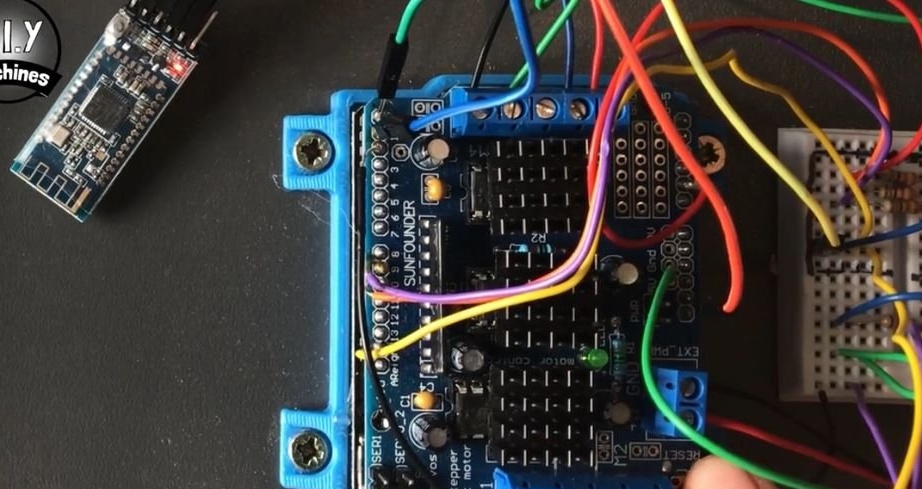
On sekizinci adım: Bluetooth modülü
Barmeni gadget'tan kontrol etmek için, usta bir Bluetooth modülü taktı. Modül aşağıdaki gibi bağlanır.
HM10 -> Arduino Kalkanı
RXD ------> TX
TXD -------> RX
GND ------> Zemin
VCC ------> 3.3V

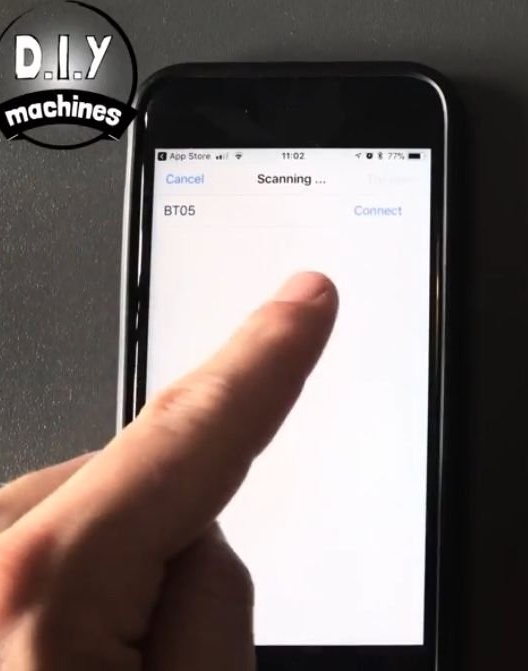
Master'ın iOS çalıştıran bir akıllı telefonu var. Bu sistem için, uygulama mağazasından “hm10 bluetooth seri lite” dosyasını indirir. Ardından bağlantılar kurar ve ayarları girer.

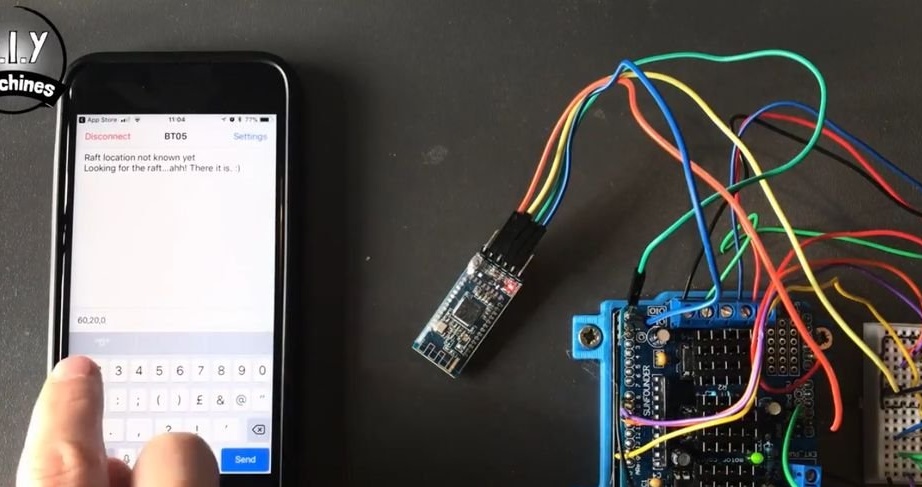
Her şey hazır ve daha eksiksiz bilgi için birkaç video.