


İyi günler Lego Technic'ten modelleme temasına devam ederek, dikkatini yüksek hız ve verim olacak SUV'un başka bir versiyonunu dikkatinize sunmak istiyorum. Diğerlerine kıyasla yüksek hız modeller, bir Tamiya 70097 Çift Motorlu Şanzıman Kiti kullanılarak sağlanacaktır. Sol ve sağ arka tekerlekler bağımsız olarak ifade edilecektir. Böylece, hareketi gerçekleştirmek için iki motor kullanılacaktır. Elektrifikasyon, her zaman olduğu gibi, Arduino. Bu kez bir Arduino Nano'ya ve başka bir şeye ihtiyacımız var:
- Lego Teknik 42079
- Tamiya 70097 Çift Motorlu Şanzıman Kiti
- Mega 328'de Arduino Nano v3
- L9110S motor sürücüleri 2 adet
- Bluetooth modülü HC-06, HC-05 veya eşdeğeri
- Beyaz LED 2 adet.
- Direnç 150 Ohm 2 adet.
- Kondansatör 10v 1000uF
- İndüktör 68mkH \
- 8 NI-Mn 1.2v 1000mA pil
- devre kartı
- Tek sıralı tarak PLS-40
- Bağlayıcı baba-anne iki pimli tel
- Farklı renkteki teller
- Lehim, reçine, havya
- Cıvatalar 3x20, somunlar ve pullar
- 3x40 cıvatalar
- Cıvatalar 3x60
Adım 1 Vites kutusunu monte edin.
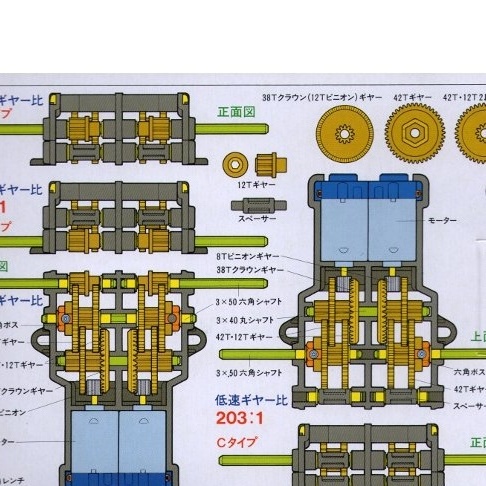
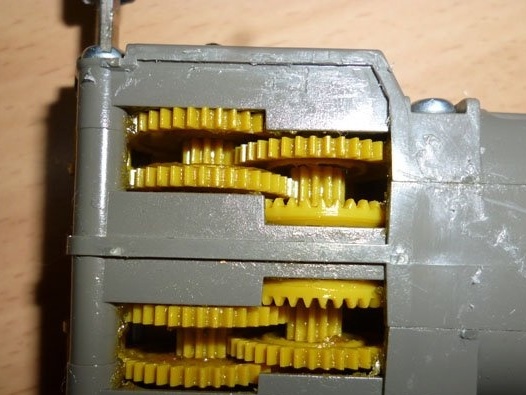
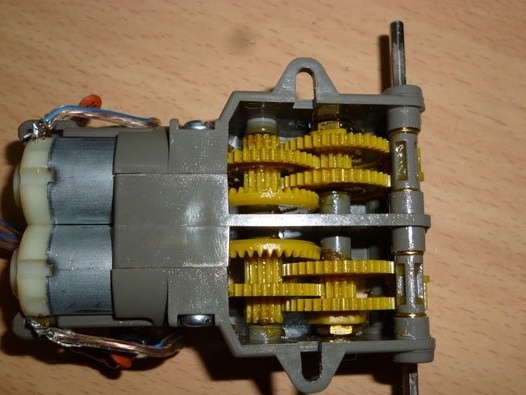
Her şeyden önce, Tamiya 70097 Çift Motorlu Şanzıman Kitini paketinden çıkarın ve monte edin. Onunla birlikte, farklı dişli oranları ile çeşitli seçeneklerin montajı için ayrıntılı bir talimattır. Bir seçenek 58: 1 dişli oranıyla, diğeri 203: 1'dir. 58: 1 oranında bir seçenek belirleyin. Ardından, çıkış millerinin yerini belirlemeniz gerekir. Vites kutusundaki talimatlara göre, iki seçenek mümkündür. Çıkış milleri merkezde veya tabana yakın. Ortadaki seçeneği seçin.
Vites kutusunu monte ederken, üzerine oturdukları dişlileri ve milleri yağladığınızdan emin olun. Birkaç dişli kutusu toplama deneyiminden, biraz gres koyduklarını söyleyeceğim ve biraz sıvı. Elbette makul bir miktarda Litol gibi bir yağlayıcı kullanmanızı tavsiye ederim.
Ve kapak tarafında:
Şimdi iki Lego bağlantı kılıfı alıyoruz:

Burçları çıkış şaftlarına koyduk:

Burçları koyduktan sonra, sıcak eriyik burçların boş yuvalarını doldurun, böylece burçları şaftlara sabitleyin:

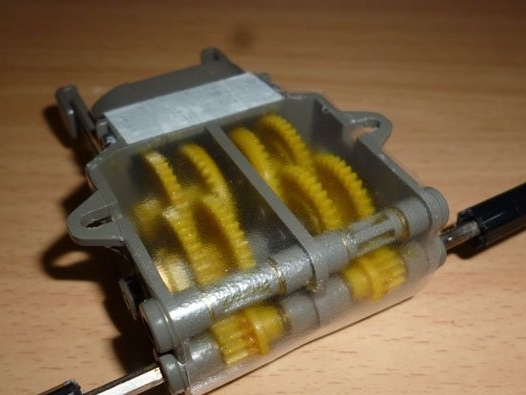
Vites kutumuzda, kasa dişlileri kapsamaz, bu da Litol'deki Lego parçalarını lekelemesi muhtemeldir. Bunu önlemek için, örneğin plastik bir bağlayıcıdan ince bir plastik alırız, şeffaf bir plastik aldım. Bir taraftan başlayarak çift taraflı bant üzerine yapıştırın, ucunu sarın ve diğer tarafa yapıştırın. Bu şekilde olmalı:

Şimdi parçayı Lego şanzımanına vidalamanız gerekiyor. Bunun için 3x20 cıvata kullanıyoruz:

Adım 2 Vakfı bir araya getirmek.
Temelin fotoğraflardan toplanması gerekecektir. Fotoğrafta her şey açıkça görülebilir:
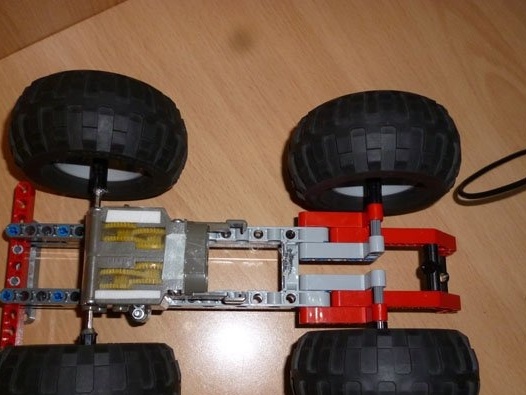
Ön kısım şöyle görünür:

Arka görünüm:

Adım 3 Kabini bir araya getirmek.
Lego 42065'den taksiye binin.Talimatları indirin
Kabini 61 adımdan başlayarak 95'e kadar monte ediyoruz. Tabanımıza bağlamak için alt montajı fotoğraftaki gibi ekleyin:

Ön tarafta ayrıca bazı ayrıntılar ekleyeceğiz:

Ve ışıkları arkaya ekleyin:
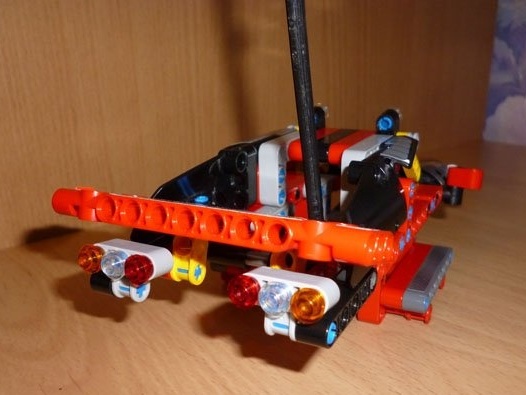
Kabinin üst kısmına ışıklar ekleyin:

Adım 4 Elektrikçi.
Modelimizin beyni Arduino Nano v3 olacak. Motor yönetimi için motor sürücüsü L9110S üzerinden yapacağız. Çok tel yapmayı sevmiyorum. Birincisi, çok yer kaplıyor ve ikincisi, çok sayıda bağlantı kötü bağlantı ve diğer “glukofor” riskini artırıyor. Bu nedenle, ihtiyacınız olan her şeyi bir devre kartında toplayacağız. Şema aşağıdaki gibi olacaktır:
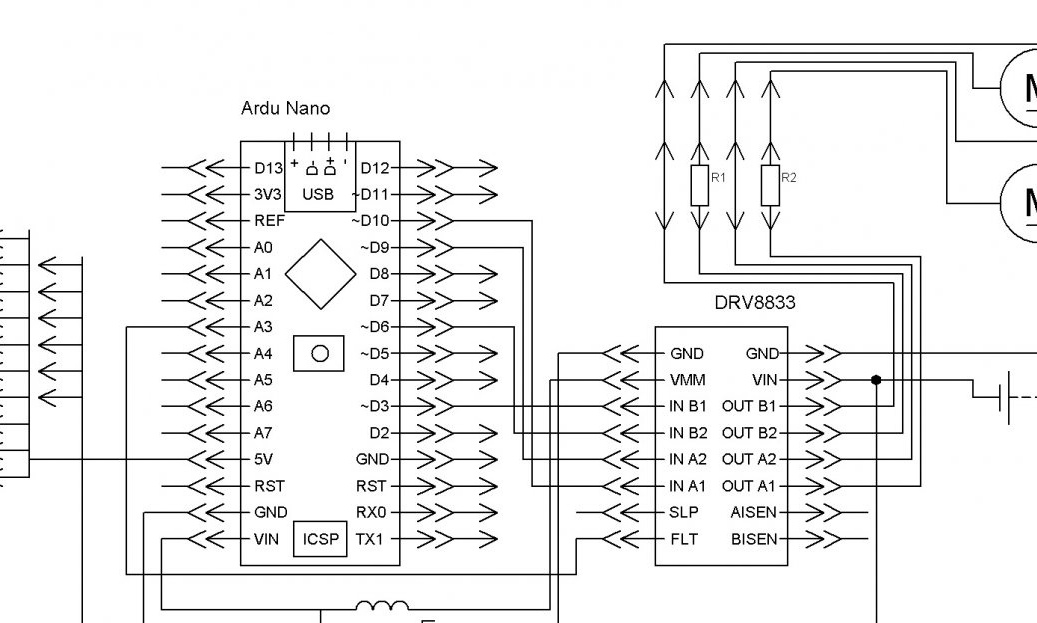
Güç Arduino, motor sürücüleri ve motorlar yaygın olacak. Motorlar bir güç dalgalanması nedeniyle açıldığında Arduino'nun yeniden başlatılmasını önlemek için, Arduino güç devresinde bulunan bir indüktör ve bir kondansatör kullanmak gerekir. Tüm bunları bir devre kartına, lehime göre lehim üzerine yerleştiriyoruz. Birleştirilmiş formda şu şekilde ortaya çıkmalıdır:
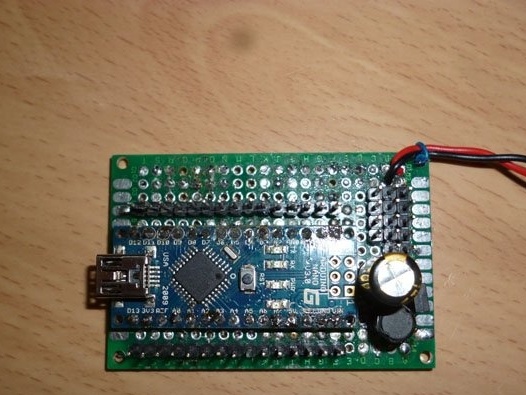
Alttan her şeyi lehim kullanarak bağlarız.

Güç için Ni-Mn pil kullanacağız. Arka arkaya 4 pil lehimliyoruz, elektrik bandı ile geri sarıyoruz ve konektörü dışarıdayken kabloyu yönlendiriyoruz. Her birinde 4 pil bulunan iki güç kaynağı alırız. Onları ön tekerleklerin yanına yerleştiriyoruz:
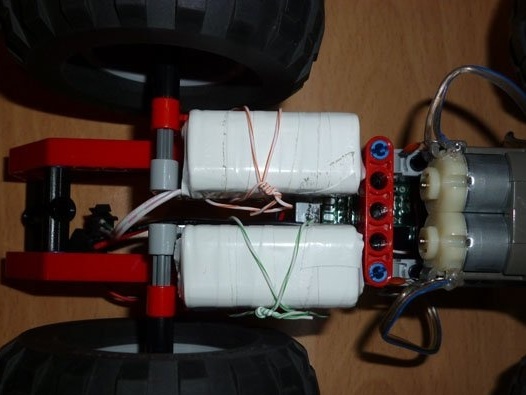
Bu iki pil takımı paralel bağlanır. Böylece, iki elektrik motoru aynı anda açıldığında oluşan yüksek amperde kararlı bir voltaj elde edilir. Farlar nominal değeri 150 ohm olan akım sınırlama dirençleri ile bağlanmalıdır.
Programlama ortamının 5. adımı.
Eskizi Arduino IDE aracılığıyla düzenleyecek ve dolduracağız. Bu basit ve kullanışlı bir programlama ortamıdır. Bu program kolayca indirilebilir
Programdaki talimatlara göre kurun. Ardından, çizim için gerekli olan Arduino IDE kütüphanesine eklemeniz gerekir. SoftwareSerial.h, Bluetooth modülü ile iletişim için bir yazılım kanalı oluşturmak için kullanılır:
İndirilen ve paketten çıkarılan arşiv “kütüphaneler” klasörüne taşınmalıdır. Bu klasör kurulu Arduino IDE'sini bularak bulunabilir. Arduino IDE'nin dahili işlevini kullanmak da mümkündür. Arşivi açmadan programlama ortamına ekleyebilirsiniz. Arduino IDE'yi başlatın, Sketch - Connect Library menü öğesini seçin. Açılır listenin başında ".Zip kitaplığı ekle" öğesini seçin. İndirilen arşivin yerini belirtiriz. Tüm adımları tamamladıktan sonra Arduino IDE'yi yeniden başlatmanız gerekir.
Adım 6 Bluetooth modülü.
Bugün için en uygun fiyatlı Bluetooth modüllerinden birini kullanacağız - HC-05 veya HC-06. Hem Çin mağazalarında hem de Rus pazarında kolayca bulunabilirler. Benzerler, ancak küçük farklılıklar var: NS-05 modülü hem ana modda (bağımlı) hem de bağımlı modda (ana) çalışabilir. NS-06 sadece bir bağımlı cihaz olabilir.
Modüllerin özellikleri:
- Bluetooth çipi - BC417143 tarafından üretilmiştir
- iletişim protokolü - Bluetooth Spesifikasyonu v2.0 + EDR;
- etki yarıçapı - 10 metreye kadar (güç seviyesi 2);
- SPP'yi destekleyen tüm Bluetooth adaptörleri ile uyumludur;
- Flash bellek miktarı (bellenim ve ayarları saklamak için) - 8 Mbit;
- radyo sinyalinin frekansı - 2.40 .. 2.48 GHz;
- ana bilgisayar arayüzü - USB 1.1 / 2.0 veya UART;
- güç tüketimi - iletişim sırasındaki akım 30-40 mA'dır. Ortalama akım değeri yaklaşık 25 mA'dir. Bağlantı kurulduktan sonra, tüketilen akım 8 mA olur. Uyku modu yok.
Her şeyin olması gerektiği gibi çalışması için, bağlanmadan önce Bluetooth modülünün yapılandırılması gerekir. Ayar, AT terminal kutusuna girilen komutlar verilerek yapılır. HC-05 modülünü yapılandıracağız. Diğer modüller için komutlar farklı olabilir. Bilgisayarı ve Bluetooth modülünü Arduino üzerinden bağlayacağız.
Bluetooth modülünü aşağıdaki gibi bağlarız:
Arduino Nano - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Arduino'da aşağıdaki çizimi doldurun:
Bu çizim, Bluetooth modülüne AT komutları göndermek için kullanılır. Arduino, terminalde yazılan her şeyi Bluetooth iletişim modülüne aktarır. Şimdi ve gelecekte modülü SoftwareSerial kütüphanesi aracılığıyla bağlayacağız. Yüksek hızlarda kütüphane kararsızdır. İletişim hızıyla ilgili sorunlarla karşılaşırsanız, modülü doğrudan Arduino'nun RX ve TX kontaklarına bağlayabilirsiniz. Bu durumda çizimi düzeltmeyi unutmayın. Bu durumda, modülle 9600 hızında çalışacağız. Bu nedenle, çizimi doldurduktan sonra terminal penceresini açın ve aşağıdaki komutları girin:
“AT” (tırnak işaretleri olmadan) “OK” cevabı gelmelidir (daha sonra her şey doğru bağlanır ve modül çalışır)
“AT + BAUD96000” (tırnak işaretleri olmadan) “OK9600” cevabı gelmelidir.
Doğru cevabınız varsa, bir sonraki adıma geçin.
Ardından, Arduino'daki SUV'umuzun taslağını doldurmanız gerekiyor:
Adım 7 modeline elektrik montajı.
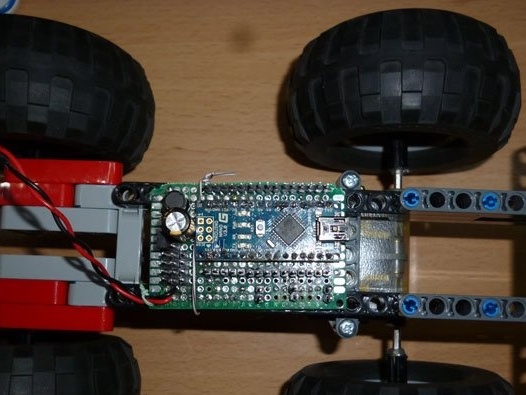
Panoları ortada kuruyoruz:
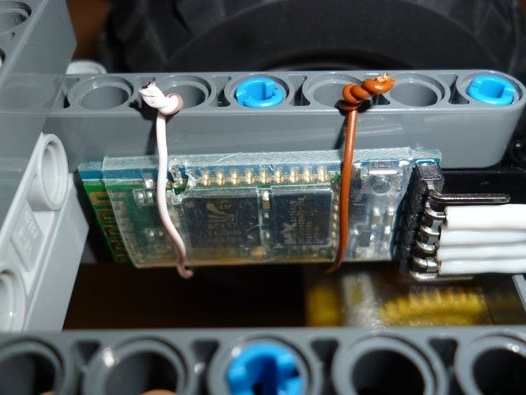
Bluetooth modülünü tabanın arkasına bir tel ile sabitleyerek takıyoruz:
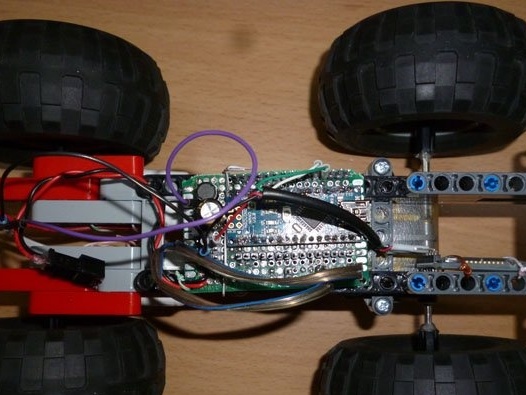
Her şeyi şemaya göre birbirine bağlarız:
Adım 8 Uzaktan Kumandayı Hazırlama
Kontrol için, her zamanki gibi bir Android telefon veya tablet veya Windows çalıştıran bir bilgisayar alıyoruz veya Arduino üzerinde kendimiz bir uzaktan kumanda yapıyoruz. Android ile başlayalım, önce robot kontrol programını Bluetooth üzerinden yüklememiz gerekiyor. Bunu yapmak için, Google play'e “Bluetooth Arduino” girin ve istediğiniz programı yükleyin. Şahsen BT Controller'ı seviyorum. Ardından, Android kurulum menüsü aracılığıyla Bluetooth modülü ile bir bağlantı kurarız. “1234” veya “0000” bağlantısı için şifreyi kullanıyoruz. Ve programı kurmaya devam edin. İlgili eylem için gerekli karakterleri yazmak gerekir. Aşağıdaki liste.
Ve şimdi - Windows yüklü bir bilgisayar. Komut göndermek için terminal programını kullanabilir veya bunun için özel olarak hazırlanmış Z-Controller programını çalıştırabilirsiniz. Bağlantı noktasını (bağlantının yapıldığı com bağlantı noktasını) seçin ve komutların anahtarlarını yapılandırın.
Üçüncü seçenek, en iyisi, fiziksel bir uzaktan kumandanın kullanılmasıdır, çünkü o zaman düğmelerin tıklandığını hissedersiniz. Benimkini izleyerek uzaktan kumanda etmenizi tavsiye ederim talimatlar
Ve ekle Bluetooth modülü
Yönetim komutları aşağıdaki gibidir:
W - ileri
S - geri
A - sol
D - sağ
F - durdur
K - farlar
L - far kapalı

