

Son zamanlarda, uçak modeli temasıyla ilgilenmeye başladım. Ve sonra başladı: bir uçak yaptı, ekipman satın aldı. Gişeden ayrılmadan ilk modelin hızlı bir şekilde ortadan kalktığını tahmin ederek, simülatörde aynı anda çalışırken ikincisini toplamaya başladı. Genel olarak, ilk gerçek uçuşumu olabildiğince geciktirdim, harekete geçmekten korktum model. Ve sonra, oldukça kazara, aliexpress'in açık alanlarını sürmek, ilginç bir şeyle karşılaştım - uçuş stabilizasyon sistemi. Bu, uçağın uçuşunu ayarlayan, daha pürüzsüz hale getiren, pilot kusurlarını yumuşatan küçük boyutlu bir alıcı cihazdır. Yeni başlayanlar için aramaya, okumaya, derlemeye ve gerçekten iyi bir şey yapmaya başladılar. Peki, işten kovuldum - istiyorum ve en azından çatlarsın. Sadece bütçe zaten tükeniyordu ... Görünüşe göre uçak tavanda 10 dolarlık bir soru inşa edecek ve ekipman satın alacak, pil satın alacak, bunun için bir şarj cihazı satın alacak, bir motor, bir regülatör, servolar, pervaneler ... Kısacası, çok şey oluyor. Biraz depresif, ama pes etmiyor, kafamın arkasını solmaya başladım: bu yüzden, nasıl lehimleneceğini biliyorum. Aramaya başladı ve hemen hemen "200 ruble için uçak stabilizasyon sistemi" başlıklı küçük bir makale buldu. Çok mütevazı bir uygulamaya sahip çok mütevazı bir makale. Ama bu zaten bir şey. Yabancı forumlara tırmandı - ve görünse de, bu sürekli gelişimi olan büyük bir proje! Karar verildi, yapacağız!
Projeye MultiWii adı verilir. Başlangıçta, multicopter tabanlı bir uçuş kontrolörü olarak tasarlandı arduino, ancak zamanla büyümeye ve gelişmeye başladı. Şimdi bu stabilizasyon sistemini uçak ve V kanatlarına koymanıza izin veren bir kod var. En basit yürütme için, yukarıdaki makalede olduğu gibi, sadece 2 şeye ihtiyacınız olacak: arduino ve ivmeölçer. Bütün bunlar tellerle lehimlenebilir, sıcak sümük ile doldurulur ve çalışacaktır. Ama olabilir ve olacak, sadece ben böyle çalışmıyorum.
Projeye MultiWii adı verilir. Başlangıçta, multicopter tabanlı bir uçuş kontrolörü olarak tasarlandı arduino, ancak zamanla büyümeye ve gelişmeye başladı. Şimdi bu stabilizasyon sistemini uçak ve V kanatlarına koymanıza izin veren bir kod var. En basit yürütme için, yukarıdaki makalede olduğu gibi, sadece 2 şeye ihtiyacınız olacak: arduino ve ivmeölçer. Bütün bunlar tellerle lehimlenebilir, sıcak sümük ile doldurulur ve çalışacaktır. Ama olabilir ve olacak, sadece ben böyle çalışmıyorum.

Ve böylece, komple bir cihazın üretimi için ihtiyacınız olacak:
- Arduino PRO Mini, 5V, Atmega 328
- Jiroskoplu üç eksenli ivmeölçer modülü MPU-6050
- Tarak pls
- Tahtayı kendiniz yaparsanız bir parça folyo fiberglas.
- SMD direnci 500-1500 Om
- Herhangi bir LED 3 mm.
Araçlardan:
- Havya
- lehim
- Akı (F5'i öneririm)
- USB - UART Dönüştürücü CP2102 veya benzeri
- Davayı yapmak için model / büro / montaj bıçağı
Şey, küçük şeyler, çift taraflı bant, makas, kulak çubukları, cımbız, en küçük olanlarla hizmette olması gerekenler.
Dediğim gibi proje büyüyor ve gelişiyor. Böylece burada, başka bir Bluetooth modülünü, denetleyiciyi telefondan, barometreyi, yüksekliği kontrol etmek için, GPS kaybolduğunda modeli "eve" döndürmek için vidalayabilirsiniz. Buna ek olarak, aynı arduino ve ucuz bir iletişim modülü A7105'e dayanan doğaçlama alıcılar konusu da büyüyor, bu da ameliyat olmadan FlySky i6 ekipmanımı engelliyor, bu nedenle teoride bu iki projeyi bağlayabilir ve bir uçak, bir planör için tam beyin alabilirsiniz veya kanatlar. Ve 6 kanaldan 14'e sessizce yanıp sönen yukarıda belirtilen bütçe ekipmanına sahip bir bölmede, bu genellikle parası için yeni başlayanlar için mükemmel bir şekilde ortaya çıkıyor.
Bu nedenle, bu cihazın devre kartını mümkün olduğunca basit, yani tek taraflı ve bir demir ile yapmaya çalıştım. Tabii ki, radyo elektroniğinde bilgi gerekli olacak, en azından az çok niteliksel olarak lehimleme yeteneği, bir tahta sipariş edebilir ve aşırı durumlarda, ancak özünde bir tasarımcı: Bir arduino diktim, lehimledim, modül ve tarak tahtaya hazırım. Minimum çaba.
Bu nedenle, bu cihazın devre kartını mümkün olduğunca basit, yani tek taraflı ve bir demir ile yapmaya çalıştım. Tabii ki, radyo elektroniğinde bilgi gerekli olacak, en azından az çok niteliksel olarak lehimleme yeteneği, bir tahta sipariş edebilir ve aşırı durumlarda, ancak özünde bir tasarımcı: Bir arduino diktim, lehimledim, modül ve tarak tahtaya hazırım. Minimum çaba.
Arduino
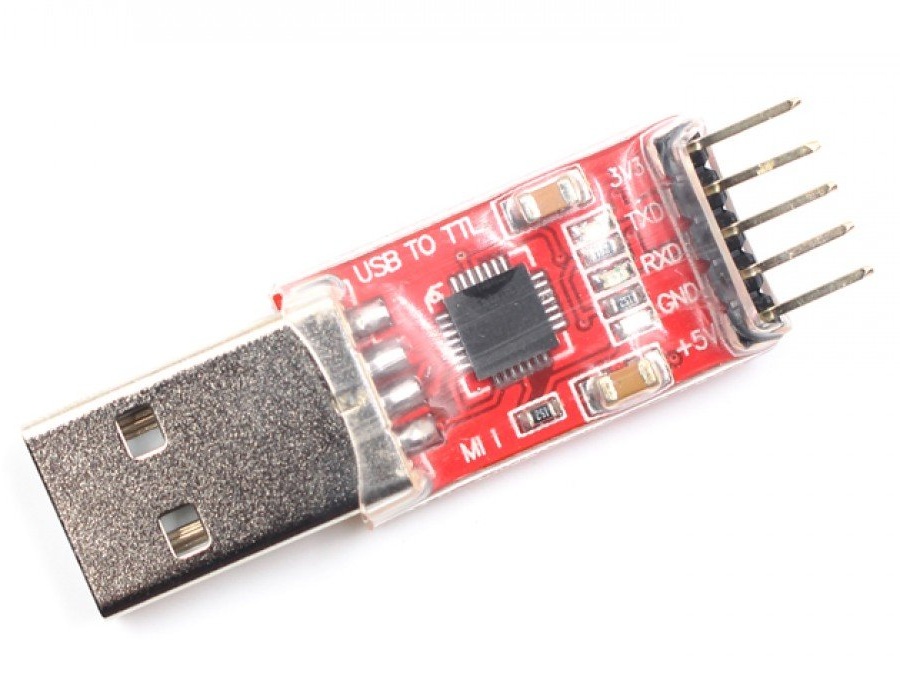
Arduinka ürün yazılımı için özel bir USB - UART (TTL) dönüştürücüye ihtiyacınız olacaktır, çünkü Arduino PRO Mini'nin bir USB arayüzü yoktur. Bundan korkmamalısınız, kural olarak, arduino ve modüllerin satıldığı yerde satın alabilirsiniz. Bu dönüştürücü aracılığıyla bellenimdeki tek fark, sıfırlama ayağını kendileri çeken dönüştürücüler olmasına rağmen, kroki indirilirken kesinlikle arduino'nun sıfırlama düğmesine basmanız gerektiğidir. Eskiz yükleme prosedürünü tarif etmeyeceğim; bu konuda yazılmış ve çekilmiş bir milyon makale ve video var.
ödeme
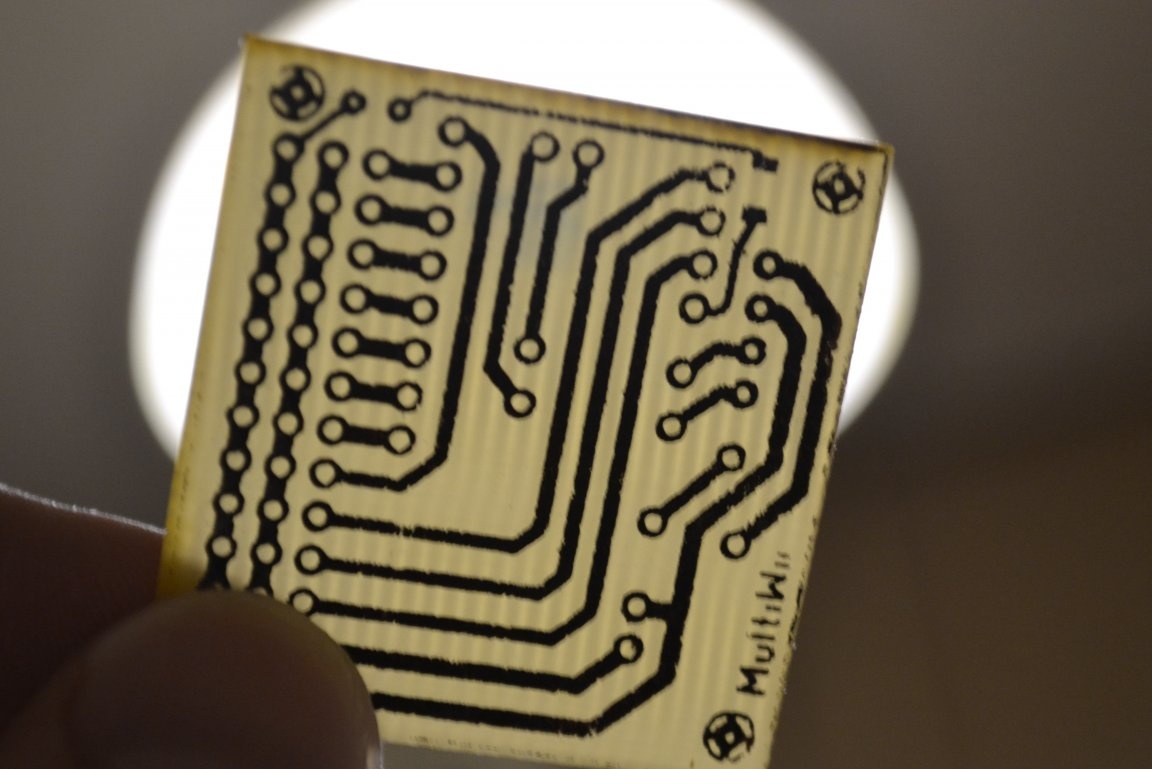
Bir sonraki adım tahta yapmaktır. Kart mevcut herhangi bir teknoloji ile yapılır veya sipariş edilir. Parçaları yırtılmasını şiddetle tavsiye ederim, ROSE veya WOODA alaşımını kullanmak daha iyidir, böylece katman mümkün olduğunca küçüktür, büyük akımlar burada dolaşmaz ve bakırı aşırı korozyon, yağmur, kardan korumak daha iyidir, asla bilemezsiniz, hala bir ev cihazı değildir. Sahte bir LUT yaptım, en iyi sonuç değil, çok kötü yazıcı yapabilirsin, ama kimin umurunda)
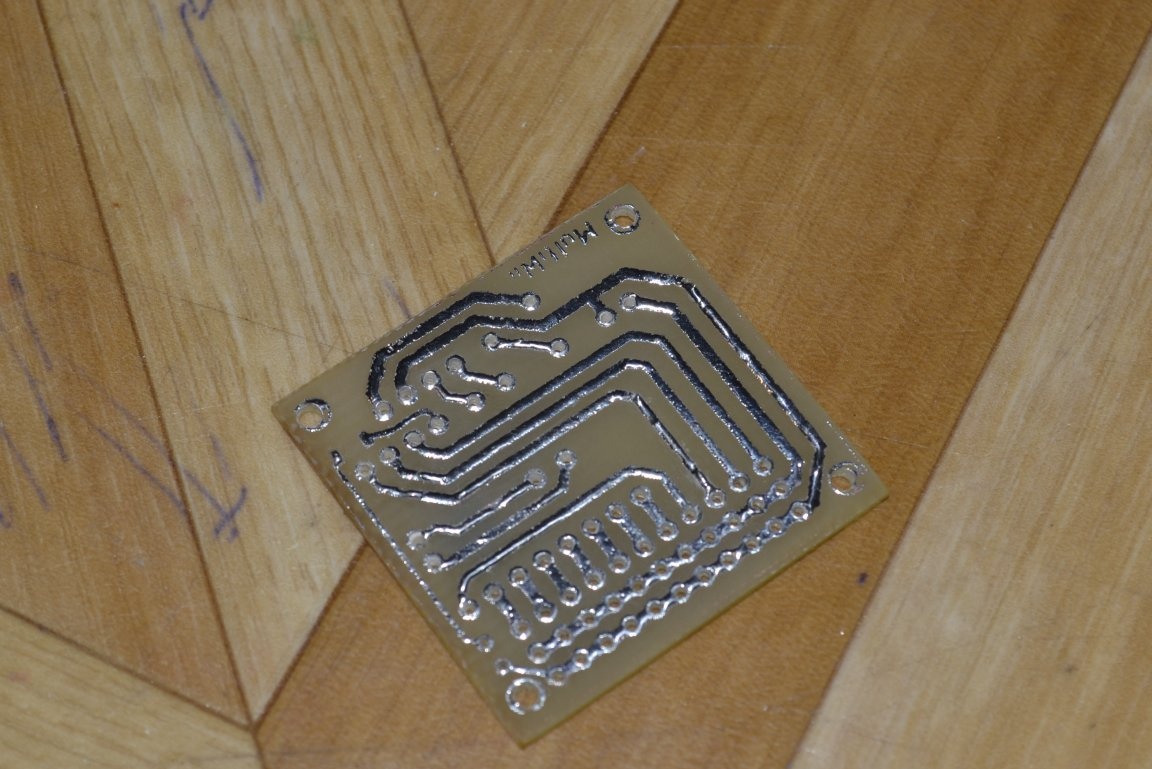
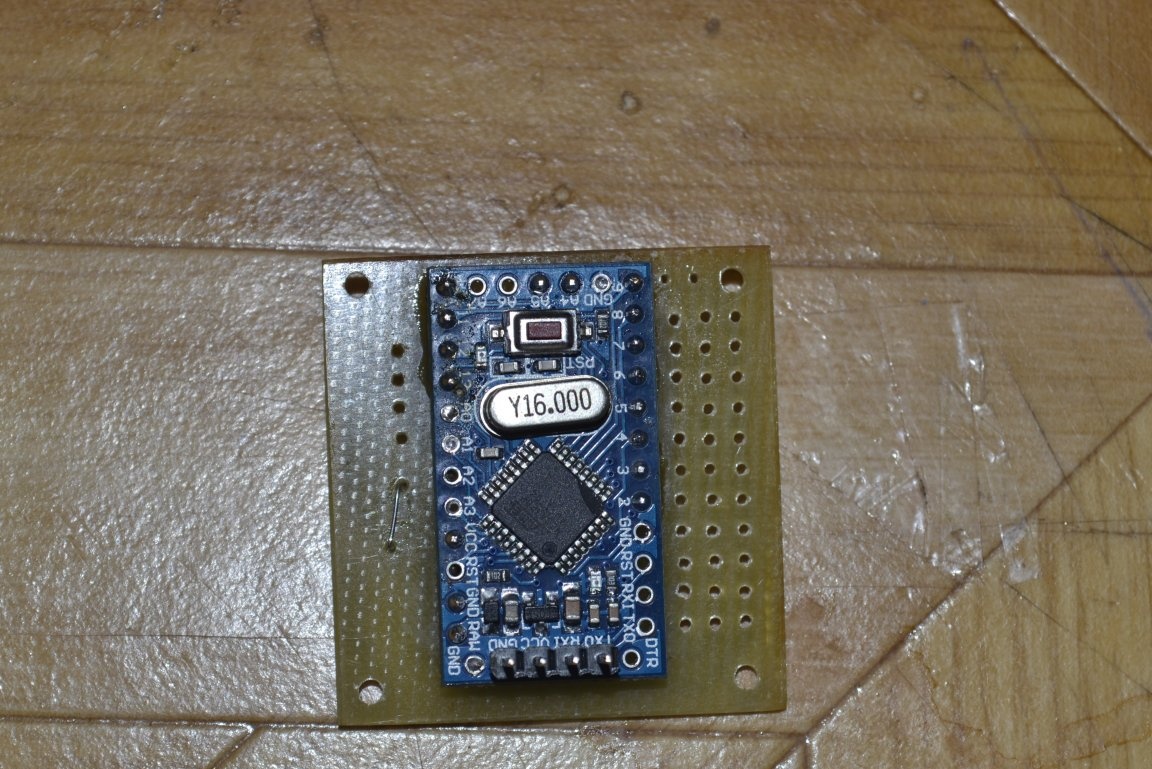
Jumperları lehimleyen ilk şey.

Arkalarında arduino var. Arduinki'yi yanıp sönen bacakların lehimlenmesi veya yana doğru açılı olması gerekir. Çizimi hemen doldurabilirsiniz, dolduramazsınız, önemli değil, çünkü monte edilen cihazın yine de bilgisayara bağlı olması gerekir, bu nedenle programlama kontaklarına kolayca erişilebilir olmalıdır. Tek tavsiye, lehimlemeden önce arduino'yu kontrol etmek, herhangi bir test çizimini doldurmak ve tahtanın yanıp söndüğünden emin olmaktır. Sadece lehim o zaman hemoroid olacak.
Peki ve diğer her şey. İvmeölçer yüksek bacaklara lehimlenmiştir ve arduino'nun üzerinde yer almaktadır. Bir günahı gizlemeyeceğim, satılan bir forumda yabancı bir forumda böyle bir düzen casusluk yaptım, ama kendi tek taraflı atkımı çizdim. Bana gelince, üç jumper yokluğu, çift taraflı bir tahta ile yaygara değmez, bu aynı jumperların varlığı ne kadar kötü olursa olsun.
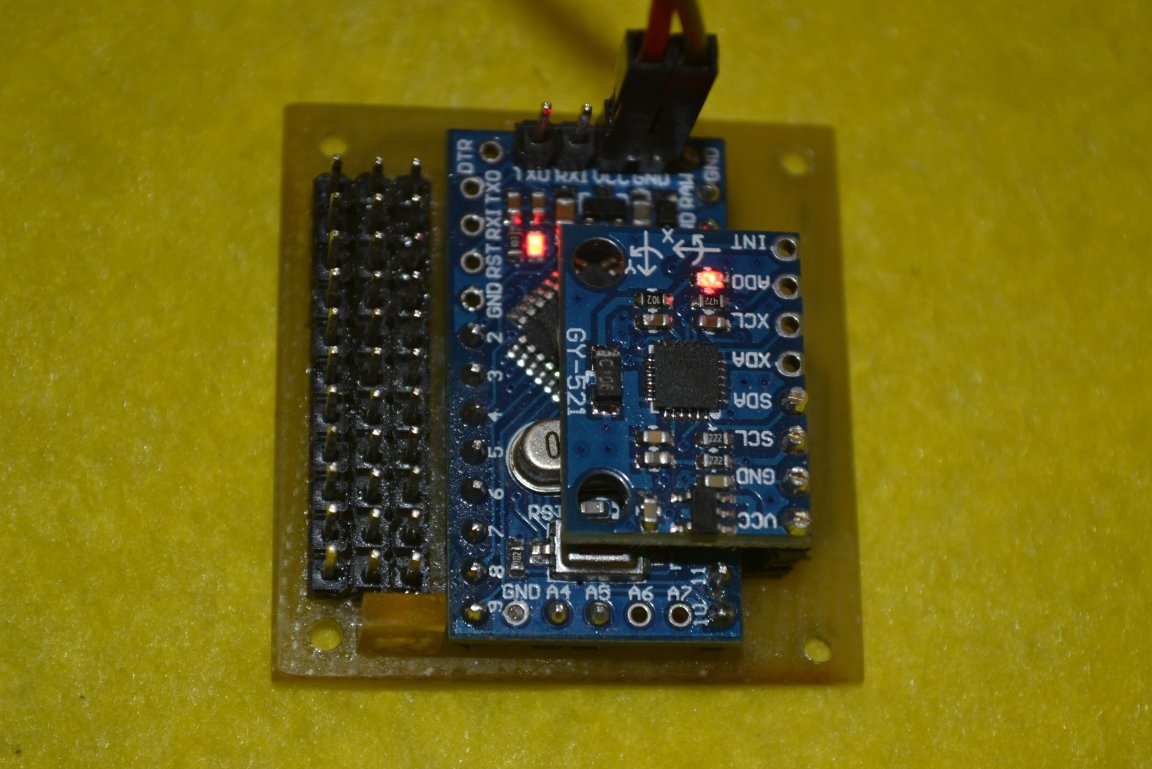
Bir ihtar. Kartta bir direnç ve LED var. Direnç SMD formatı, 500 Ohm - 1.5 kOhm nominal değeri olan bazı kırık ekipmanlardan çıkarılabilir. Sıradan bir 3mm LED alabilirsin, dikdörtgen bir tane vardı, lehimledim.
Bu aşamada, cihaz prensip olarak zaten bağlanabilir ve yapılandırılabilir, ancak bana göre eksik görünüyor. elektronik radyo kontrollü modeller için uzun süredir modüler bir karakter kazanmıştır. Bu nedenle, bu cihazın modele monte edilmesi ve bağlanması kolay olan bitmiş modüle getirilmesi gerektiğini düşünüyorum. Bunu yapmak için bir davaya ihtiyacı var. 3D yazıcıda yazdırmak için iyi bir seçenek olabilir, baskı için kullanılan plastik hafif ve dayanıklıdır. Ama herkes buna sahip değil. Termoform yaparak davayı yapabilirsiniz, internette elektrikli süpürge, kereste ve bir kontrplak parçasından bunun için basit bir makinenin nasıl yapılacağı hakkında bir ton bilgi var. Ancak bunun için bir blok başlığı yapmanız gerekiyor ve bu tembellik. Bu konuda, en az direniş yolunu seçtim. Evet ve böyle bir yöntem bu makaleye benzer - minimum araç kullanarak mümkün olduğunca basit hale getirmek için.
konut
Tahtanın boyutuna göre, iki plastik parçayı kestim, benim durumumda ince şeffaf bir PVC, ancak örneğin herhangi bir şey, bir diskten bir kutu kullanabilirsiniz. Ara fotoğraf çekmedim, ama yine de net olacağını düşünüyorum.Bir cetvel kullanarak tahtadaki kontaklara olan mesafeyi ölçtüm ve onlar için pencereleri "kasanın" üstünde kestim. Tahtadaki deliklerle eş eksenli delikler açtım ve her şeyi tüplerden kulak çubuklarından doğaçlama perçinlerle birleştirdim. Böyle bir perçin yapmak için, tüpün ucunu hafifçe ateşin alevinde tutmak yeterlidir ve bir akıntı oluştuğunda, bu çakmağın gövdesine bastırın. Ters tarafta, birkaç milimetre bırakarak tüpleri kestik ve aynısını yapıyoruz. Ara parçalar olarak damlalıktan tüpün segmentleri kullanılır. Sonuç olarak, böyle bir sandviç çıktı:
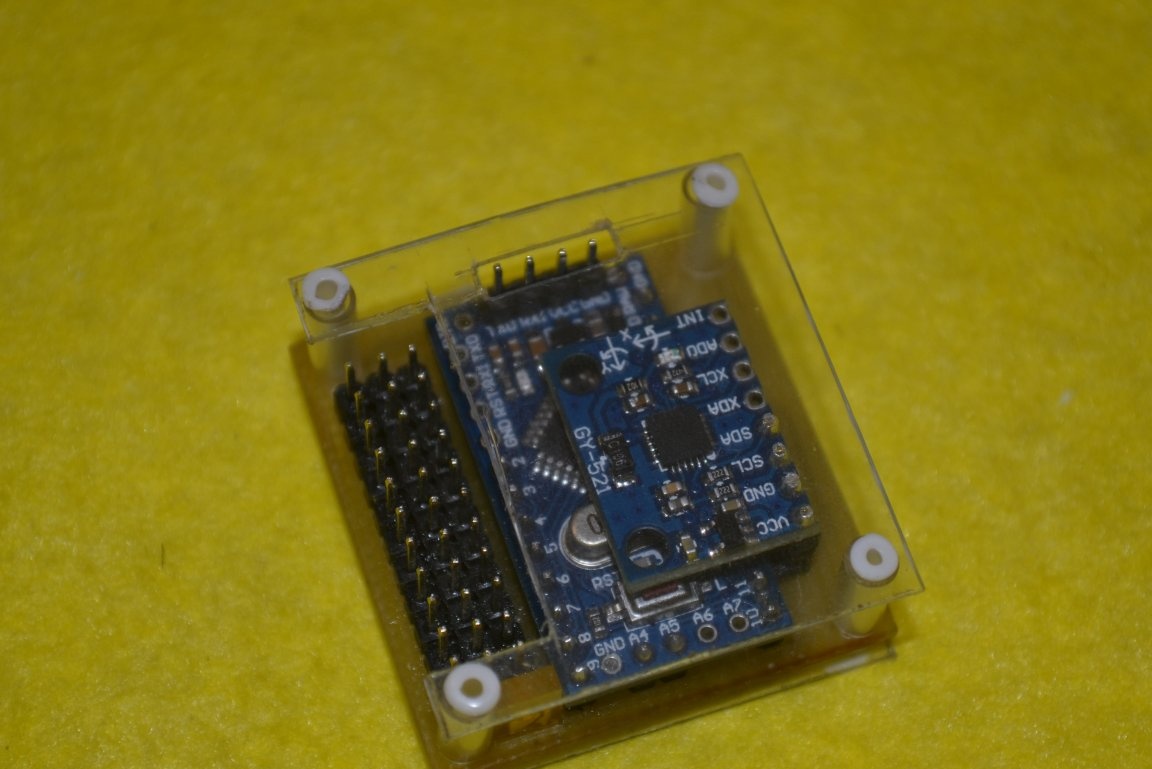
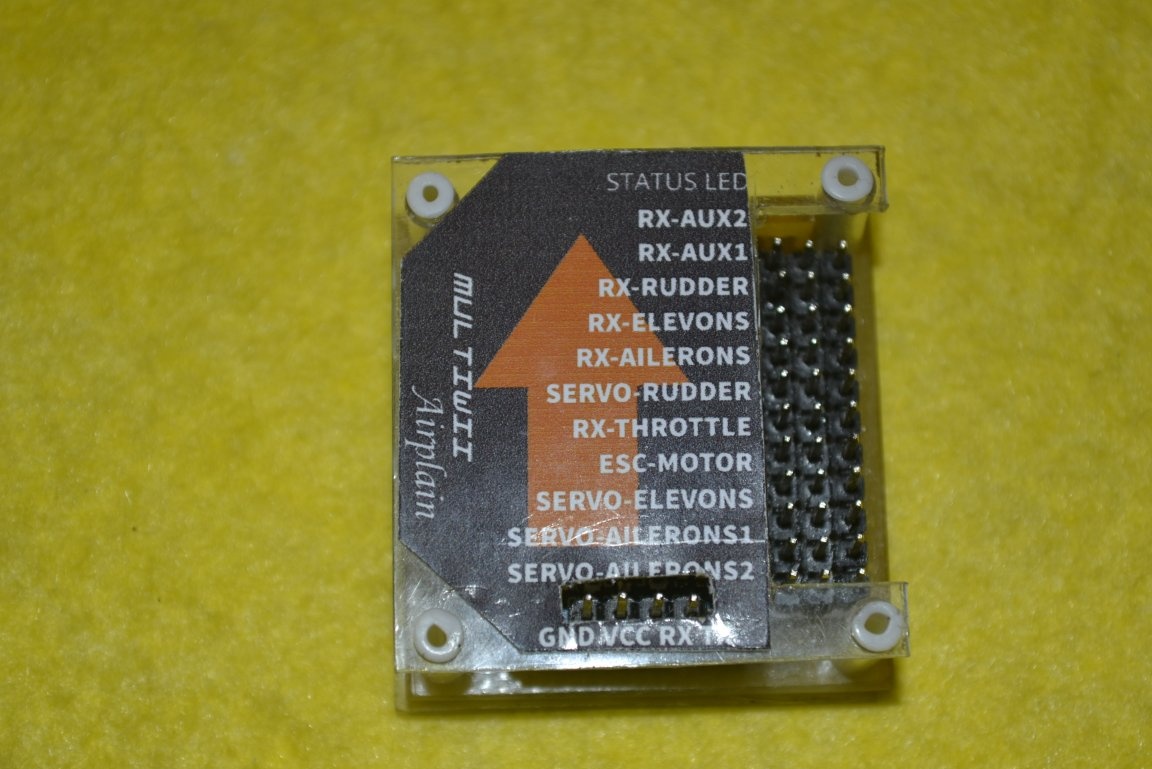
Yapması kolay, hafif, basit ve güvenilir. Bir çift "otomobil" çift taraflı bant şeridini yapıştırmak suretiyle uçağın gövdesine monte etmek zaten uygundur. Ancak tam resim için, hala yarım yıl içinde, onbir diğer şemanın bir araya getirileceği, neye bağlanacağınızı söyleyecek bir isim plakasına ihtiyacınız var.
Etiket kendinden yapışkanlı parlak kağıda basılmıştır. Son zamanlarda bu tür amaçlar için özel olarak satın alındı. Daha önce bunu yaptım: Sahip olduğum şeye baskı yaptım, yapışkan bant ile lamine edip çift taraflı banda yapıştırdım. En özenli İngilizce seviyemi değerlendirebilir)
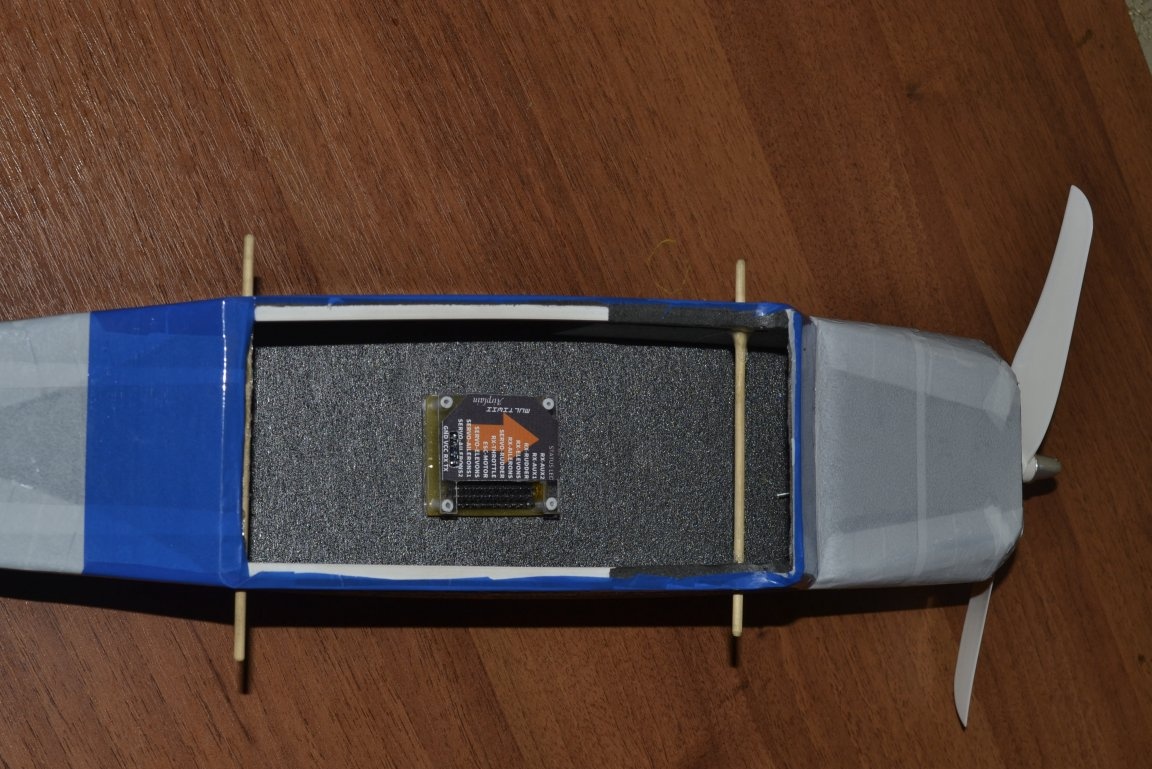
Şimdi cihaza gerçekten hazır modül denilebilir. Toplam ağırlık 15.5 gram. Satın alınan ile karşılaştırıldığında çok fazla, ancak genel olarak, çok fazla bir şey yok. En azından 950mm aralıklı modelim sorunsuz bir şekilde çekilecek. Ancak ağırlığı kovalarsanız, arduino'yu doğrudan tahtadaki gevşek tozdan kaldırabilir, 2 gram tasarruf edebilir, ince bir milimetre textolite kullanabilirsiniz (bir, bir buçuk veya iki milimetreyi ölçmedim, ölçmedim), davayı yapmayın. Ama bu 5 gram değerinde mi? Örneğin, uygulamamdan yerel alıcının ağırlığı 16 gramdır.
Cihaz yatay bir düzlemde bulunmalıdır, ok hareket yönünü gösterir. Ayrıca, cihaz baş aşağı monte edilemez. Açıklık için bir resim ekliyorum.
Şimdi cihaza gerçekten hazır modül denilebilir. Toplam ağırlık 15.5 gram. Satın alınan ile karşılaştırıldığında çok fazla, ancak genel olarak, çok fazla bir şey yok. En azından 950mm aralıklı modelim sorunsuz bir şekilde çekilecek. Ancak ağırlığı kovalarsanız, arduino'yu doğrudan tahtadaki gevşek tozdan kaldırabilir, 2 gram tasarruf edebilir, ince bir milimetre textolite kullanabilirsiniz (bir, bir buçuk veya iki milimetreyi ölçmedim, ölçmedim), davayı yapmayın. Ama bu 5 gram değerinde mi? Örneğin, uygulamamdan yerel alıcının ağırlığı 16 gramdır.
Cihaz yatay bir düzlemde bulunmalıdır, ok hareket yönünü gösterir. Ayrıca, cihaz baş aşağı monte edilemez. Açıklık için bir resim ekliyorum.
Kurulum, kalibrasyon
Şimdi ayarlara gidin. İlk önce cihazı bilgisayara bağlamanız ve ardından ekli grafik kullanıcı arayüzünü açmanız gerekir. Sürücülerle ilgili herhangi bir sorun yoksa, bağlantı noktası programda görünmelidir:
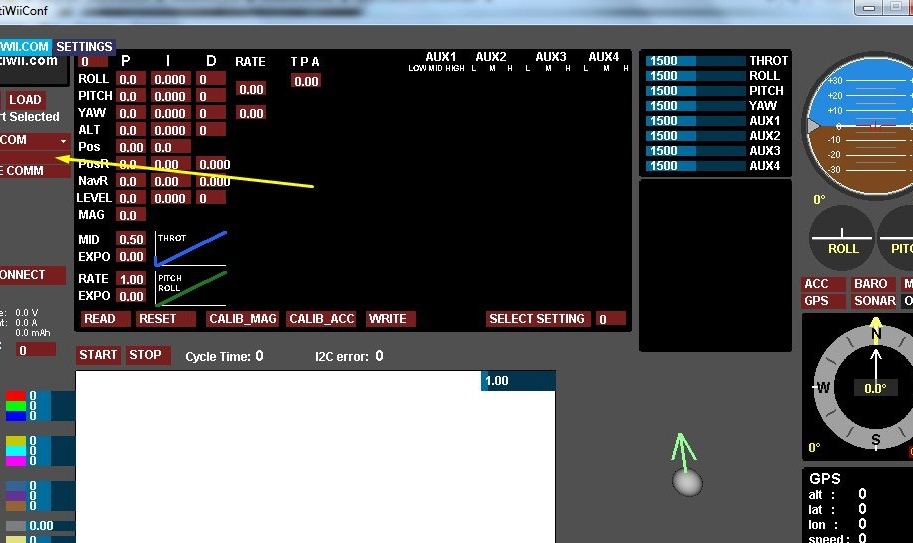
Biz seçiyoruz. Şimdi ivmeölçeri kalibre etmeniz gerekiyor. READ düğmesine basarız ve her şey doğruysa, sensörden gelen değerleri gerçek zamanlı olarak gözlemleyebiliriz. Cihazı düz bir yüzeye yatırıyoruz ve CALIB_ACC tuşuna basıyoruz. Genellikle “düz bir yüzey” bilgisayarın yakınındaki bir masadır, bu yüzden kalibrasyona bastığınızda ellerinizi masadan uzak tutun. Hatırlamayan, ivmeölçer bir ivme sensörüdür. Bu nedenle kalibrasyondaki herhangi bir titreşim veya titreşimin olumlu bir etkisi olmayacaktır. Ancak mümkünse, seviyeye maruz kalan bir yüzeyde kalibre etmek daha iyidir. Jiroskop her açıldığında kalibre edilir, bu yüzden kalibre edilmesi gerekmez. Tek şey, modeli açtığınızda sabit olmalı. Yani, modeli yere koyarız, açarız ve dokunmayız. Jiroskop hemen kalibre edilir. Kalibrasyon, DURUM olarak imzalanan bir LED ile gösterilir.
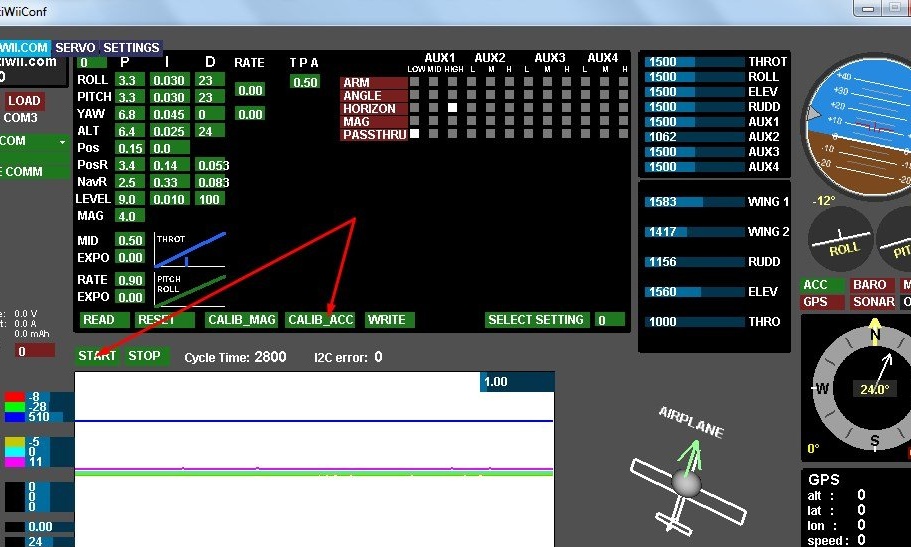
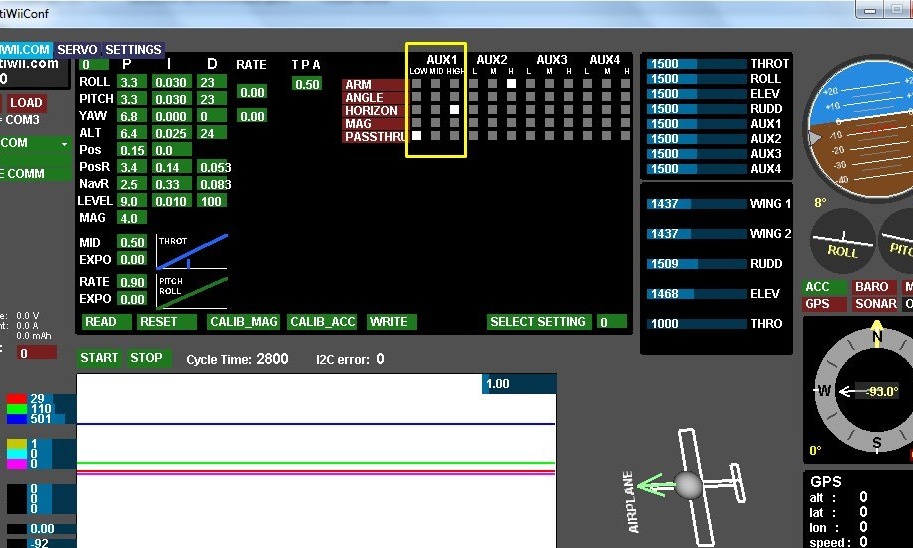
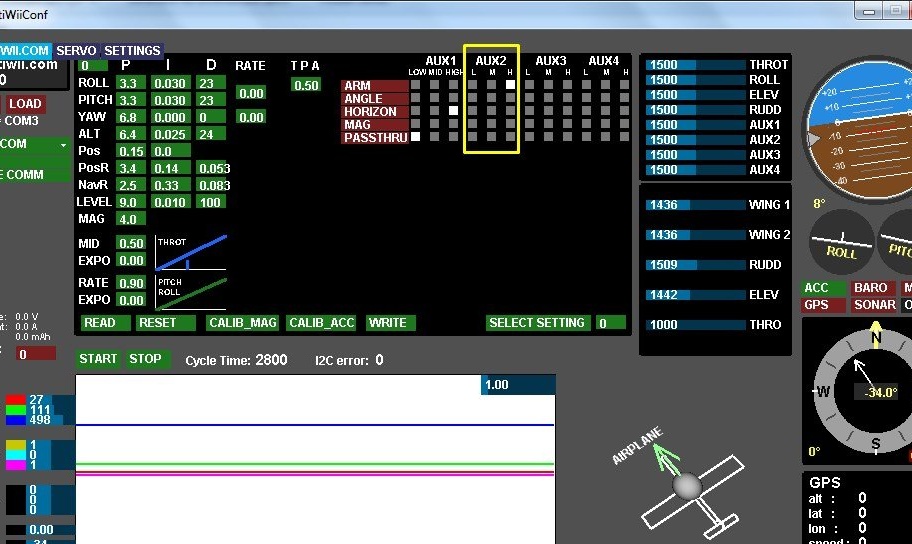
Hemen AUX1'i yapılandırın. Vericide bir tane varsa, üç konumlu bir anahtar kullanması uygundur. Düşük bir seviyede (anahtar ilk konumdadır), stabilizasyon devre dışı bırakılır, ortalama bir seviyede (ve sırasıyla konum) bir ivmeölçer açılır ve yüksek bir seviyede bir jiroskop ve bir ivmeölçer. Normal bir uçuş için, prensip olarak, bir ivmeölçer yeterlidir, genellikle FPV uçuşları için bir jiroskop kullanılır. Açıkladığım gibi olurdu - değerleri burada gösterildiği gibi ayarlayın:
Diğer ayarlar hakkında biraz. PID - bunlar stabilizasyonun kendisinin ayarlarıdır. Özetle:
- P modeli başlangıç pozisyonuna döndürmek için uygulanan düzeltici kuvvetin değeridir.
- ben Açısal sapmaların kaydedildiği ve ortalamanın alındığı süredir.
- D - bu, modelin başlangıç konumuna geri dönme hızıdır.
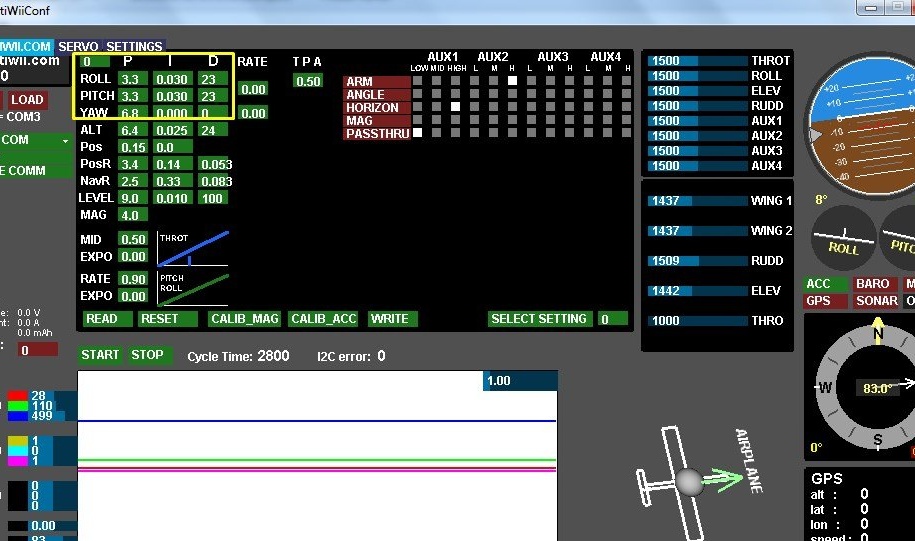
İlk uçuştan önce bu ayarlara dokunmamanızı tavsiye ederim. Stabilizasyon temel değerlerde iyi çalışır ve orada bir şey size uymuyorsa zaten sıkılaşabilirsiniz.
Sonraki. TPA gaz konumuna bağlı olarak bu PID ayarlarının değerinden sorumludur. 0.00 değerinde, PID değerleri herhangi bir gaz pozisyonunda, yani beklendiği gibi, herhangi bir hızda aynı olacaktır. Gazlı 1.00 değeri ile% 100 PID sıfır olacaktır, yani stabilizasyon devre dışı bırakılacaktır. Gazın% 100'ü başına 0.5'lik bir değerde, pids sırasıyla% 50'ye eşit olacaktır. Burada zaten uçak ve akrobasi tarzınız için ayarlanıyor, şimdiye kadar% 50 bıraktım.
Ayrıca kanalda AUX2 takviyeyi yapılandırmanız gerekir. Kurma bir helikopter terimidir. İnsanca buna motorun kilidini açmak denir. Uçaklarda, bu genellikle kontrol ekipmanı ile uygulanır, ancak Bu kontrolör başlangıçta helikopterdi - burada oldukça zor yapıldı. Genel olarak, AUX2'ye bir tür serbest geçiş anahtarı asıyoruz, ARM'de yüksek seviyeye ayarladığımız programda. Burada, birisi hile yapmak ve kilidini AUX2'nin tüm seviyelerinde ayarlamak isteyebilir, ancak başarısız olmaz. Bu durumda, multiviy motoru çalıştırmayı reddeder. Bunun bir hata olduğu varsayılabilir, ancak korumanın yakında olduğunu düşünüyorum. Uçak hala sadece uçuyor ve kontrolsüz helikopterin nerede patlayacağını yalnızca Tanrılar biliyor.
Bu arada, bu aslında uygun. Özellikle, uygulamamda, geçiş anahtarını yukarı hareket ettirerek motorun kilidini açar. Bu durumda, ekipman sadece tüm değiştirme anahtarları üst konumdayken açılmalıdır. Yani, ekipmanı açmanız, motoru engellemek için seçim anahtarını aşağı hareket ettirmeniz ve ardından kilidini açmak için geri transfer etmeniz gerektiği ortaya çıkıyor. Ve asıl şeyi tersine çeviremezsiniz. Hemen insanca çıkıyor, üst konumda motor kilitli, alt kilitsiz.
Sonraki. TPA gaz konumuna bağlı olarak bu PID ayarlarının değerinden sorumludur. 0.00 değerinde, PID değerleri herhangi bir gaz pozisyonunda, yani beklendiği gibi, herhangi bir hızda aynı olacaktır. Gazlı 1.00 değeri ile% 100 PID sıfır olacaktır, yani stabilizasyon devre dışı bırakılacaktır. Gazın% 100'ü başına 0.5'lik bir değerde, pids sırasıyla% 50'ye eşit olacaktır. Burada zaten uçak ve akrobasi tarzınız için ayarlanıyor, şimdiye kadar% 50 bıraktım.
Ayrıca kanalda AUX2 takviyeyi yapılandırmanız gerekir. Kurma bir helikopter terimidir. İnsanca buna motorun kilidini açmak denir. Uçaklarda, bu genellikle kontrol ekipmanı ile uygulanır, ancak Bu kontrolör başlangıçta helikopterdi - burada oldukça zor yapıldı. Genel olarak, AUX2'ye bir tür serbest geçiş anahtarı asıyoruz, ARM'de yüksek seviyeye ayarladığımız programda. Burada, birisi hile yapmak ve kilidini AUX2'nin tüm seviyelerinde ayarlamak isteyebilir, ancak başarısız olmaz. Bu durumda, multiviy motoru çalıştırmayı reddeder. Bunun bir hata olduğu varsayılabilir, ancak korumanın yakında olduğunu düşünüyorum. Uçak hala sadece uçuyor ve kontrolsüz helikopterin nerede patlayacağını yalnızca Tanrılar biliyor.
Bu arada, bu aslında uygun. Özellikle, uygulamamda, geçiş anahtarını yukarı hareket ettirerek motorun kilidini açar. Bu durumda, ekipman sadece tüm değiştirme anahtarları üst konumdayken açılmalıdır. Yani, ekipmanı açmanız, motoru engellemek için seçim anahtarını aşağı hareket ettirmeniz ve ardından kilidini açmak için geri transfer etmeniz gerektiği ortaya çıkıyor. Ve asıl şeyi tersine çeviremezsiniz. Hemen insanca çıkıyor, üst konumda motor kilitli, alt kilitsiz.
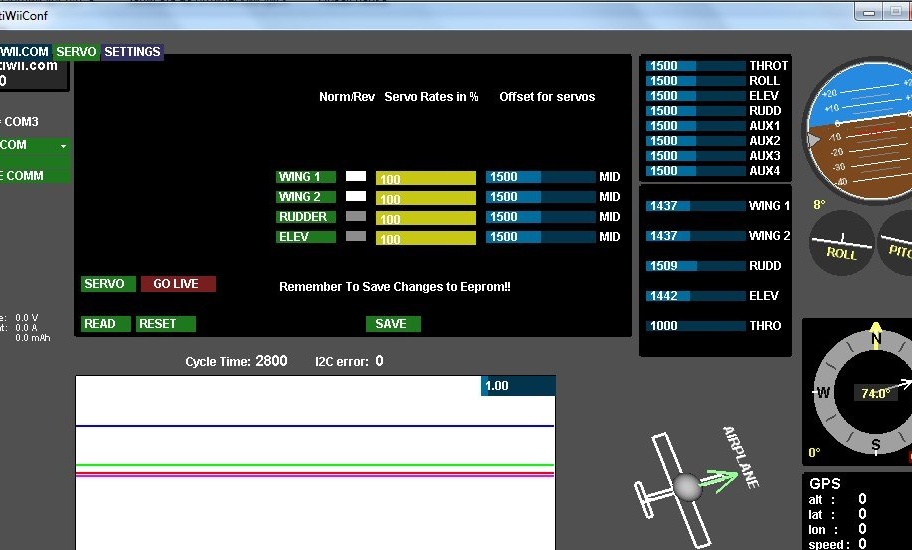
Sekmede SERVO gerekirse servoları tersine çevirebilirsiniz. Burada bir şekilde karmaşık bir şekilde yaptılar. İlk önce SERVO'ya basmanız gerekir. Servolar ve seviyelerin bir listesi görünecektir. Şimdi geri düğmesine basar ve kaydetmeye çalışırsanız hiçbir şey kaydedilmez. İlk önce GO LIVE tuşuna basmanız gerekir, bundan sonra çubuklar reddedildiğinde pencerede seviye sapmasını gözlemlemek mümkün olacaktır. Şimdi istenen kanalın geri düğmesine basıyoruz ve ardından KAYDET düğmesine basıyoruz. Şimdi her şey kaydedildi.
Aygıtın bilgisayarla olan bağlantısının kesilmesi ile ilgili önemli bir nokta. COM kablolarını veya MultiWiiConf programını kapatmadan programlama kablolarını cihazdan çıkarırsanız veya dönüştürücüyü USB bağlantı noktasından çıkarırsanız, sistem çökecek ve mavi ekran yaklaşık% 100 olasılıkla olacaktır. En azından dizüstü bilgisayarımda. Hatta özellikle kontrol ettim. Bunun donanımımla ilgili bir sorun olup olmadığını bilmiyor veya tepki veriyorsa sanal COM bağlantı noktasına görünür, ancak uyarılırsa, silahlı olduğu anlamına gelir. Unutmayın.
Ve kullanışlı olabilecek birkaç ayar daha. Alıcınız bir PPM sinyalinin nasıl verileceğini biliyorsa, sinyali çoklu görüntüye iletmek isteyebilirsiniz. Bunu yapmak için ürün yazılımı dosyasını açın, config.h sekmesine gidin ve bölümü arayın PPM Toplamı Alıcı (yüceltilmiş Ctrl + F). Burada 2 satırı uncommentize etmeniz gerekiyor. Konuda olmayan, rahatsız edici - bu, çizginin başında iki eğik çizgiyi kaldırmak anlamına gelir. Şöyleydi:
Ve kullanışlı olabilecek birkaç ayar daha. Alıcınız bir PPM sinyalinin nasıl verileceğini biliyorsa, sinyali çoklu görüntüye iletmek isteyebilirsiniz. Bunu yapmak için ürün yazılımı dosyasını açın, config.h sekmesine gidin ve bölümü arayın PPM Toplamı Alıcı (yüceltilmiş Ctrl + F). Burada 2 satırı uncommentize etmeniz gerekiyor. Konuda olmayan, rahatsız edici - bu, çizginin başında iki eğik çizgiyi kaldırmak anlamına gelir. Şöyleydi:
// # PPM_ON_THROTTLE tanımlaÖyle oldu:
#define PPM_ON_THROTTLEAyrıca donanıma bağlı olarak bu satırlardan birini de açmanız gerekir:
// # define SERIAL_SUM_PPM PITCH, YAW, GAZ, ROLL, AUX1, AUX2, AUX3, AUX4,8,9,10,11 // Graupner / Spektrum için
// # define SERIAL_SUM_PPM ROLL, PITCH, GAZ, YAW, AUX1, AUX2, AUX3, AUX4,8,9,10,11 // Elbise / Hitec / Futaba için
// # tanım SERIAL_SUM_PPM ROLL, PITCH, YAW, GAZ, GİZLİ, AUX1, AUX2, AUX3, AUX4,8,9,10,11 // Multiplex için
// # define SERIAL_SUM_PPM PITCH, ROLL, GAZ, YAW, AUX1, AUX2, AUX3, AUX4,8,9,10,11 // Bazı Hitec / Sanwa / Diğerleri içinBenim durumumda, bu ikinci satır, nerede Futaba (ne için FlySky ekipmanı var). Burada ampirik olarak seçmek gerekli olabilir, istenen diziyi kendiniz reçete etmek mümkündür. Öyle ya da böyle, bu konuda karmaşık bir şey yok. Çizimi derliyor ve yenisiyle dolduruyoruz. Normal moda dönmek için, tersini yapın, satırlara yorum yapın, derleyin, doldurun. Dikkat etmek istiyorum, çizimi yeniden yükledikten sonra tüm ayarlar ve kalibrasyon devreden çıkarılacak, bunu aklınızda bulundurun.
Anladığım kadarıyla sıkça karşılaşılan başka bir yaygın sorunla karşılaşıyorum ve istisna değilim.Herkes monte edip yapılandırdıktan sonra, tüm direksiyon simidini bağladı - dümen yüzüyor. Uzaktan kumanda üzerindeki tutamaklar sarsıldı - yerinde görünüyordu, ancak planör biraz salladıysa - tekrar yana doğru ve oldukça ciddi bir açıyla yüzüyor. Temel olarak ele alınır: GUI programında, değeri ayarlayın YAW - I sıfıra. Sorun hemen ortadan kalkar.
Anladığım kadarıyla sıkça karşılaşılan başka bir yaygın sorunla karşılaşıyorum ve istisna değilim.Herkes monte edip yapılandırdıktan sonra, tüm direksiyon simidini bağladı - dümen yüzüyor. Uzaktan kumanda üzerindeki tutamaklar sarsıldı - yerinde görünüyordu, ancak planör biraz salladıysa - tekrar yana doğru ve oldukça ciddi bir açıyla yüzüyor. Temel olarak ele alınır: GUI programında, değeri ayarlayın YAW - I sıfıra. Sorun hemen ortadan kalkar.
Video çalışıyor:
Sonuç
Genel olarak, baskılı devre kartlarının üretiminde deneyiminiz varsa, cihaz bir akşam monte edilir. Düzlemde temel ayarları kendim eskizde yaptım, geri kalanında makalede açıkladım. Bilgi başta forum olmak üzere çeşitli forumlarda toplanmak zorundaydı. Bununla birlikte, olmamasına rağmen, diğer sorunlarda yardımcı olacak çeşitli kaynaklara bağlantılar veriyorum.
yönetim kurulunun form faktörünü ödünç aldım. Satın almayı teklif etmiyorum, ancak konunun İngilizce ürün yazılımı yapılandırması hakkında ayrıntılı bir kılavuzu var. Eski bellenim sürümü için doğrudur, ancak yenisinde her şey neredeyse aynıdır. Ayrıca branşta, potansiyometre kontrol ekipmanı aracılığıyla PID ayarlarını gerçek zamanlı olarak ayarlamanıza izin veren bir mod da vardır.
. Kendi kişisel yeniden yazılmış ürün yazılımına sahip, bunun uçaklar için ideal bir şekilde optimize edildiğini söylüyorlar. Ama yine, eski versiyon. Bunu deneyebilirsiniz, ancak bu makalede açıklanmayan aksaklıkların ortaya çıkmasından sorumlu değilim. Ayarların birçok açıklaması vardır.
. Ancak orada açıklanan temel yararlı bilgiler, yani dümen tedavisi, daha önce özetledim. Yine de, asla bilemezsin.
Arduino ve modülün hangi fiyata satın alındığına bağlı olarak toplam maliyet 4-8 dolar arasında değişiyor, evde bir textolite var, bir programcı var. Her durumda, bu, aynı özelliklere sahip cihaz başına 20 $ 'dan piyasa değerinden birkaç kat daha azdır. Şahsen, bana 2 dolara mal oldu, bir yıl önce bu amaçlar için bir arduino stoğu satın alındı, sadece bir modül yoktu.
Aşağıda ekli arşivde, arduino için bir taslak, farklı işletim sistemleri için MultiWiiConf kurulum programı, bir devre kartı dosyası (açmak için SprintLayout'a sürüm 6'dan daha az değil) ve evde lazer yazıcısı olmayanlar için PDF formatında bir baskılı devre kartı ( % 100'de yazdırmanız gerekir).
yönetim kurulunun form faktörünü ödünç aldım. Satın almayı teklif etmiyorum, ancak konunun İngilizce ürün yazılımı yapılandırması hakkında ayrıntılı bir kılavuzu var. Eski bellenim sürümü için doğrudur, ancak yenisinde her şey neredeyse aynıdır. Ayrıca branşta, potansiyometre kontrol ekipmanı aracılığıyla PID ayarlarını gerçek zamanlı olarak ayarlamanıza izin veren bir mod da vardır.
. Kendi kişisel yeniden yazılmış ürün yazılımına sahip, bunun uçaklar için ideal bir şekilde optimize edildiğini söylüyorlar. Ama yine, eski versiyon. Bunu deneyebilirsiniz, ancak bu makalede açıklanmayan aksaklıkların ortaya çıkmasından sorumlu değilim. Ayarların birçok açıklaması vardır.
. Ancak orada açıklanan temel yararlı bilgiler, yani dümen tedavisi, daha önce özetledim. Yine de, asla bilemezsin.
Arduino ve modülün hangi fiyata satın alındığına bağlı olarak toplam maliyet 4-8 dolar arasında değişiyor, evde bir textolite var, bir programcı var. Her durumda, bu, aynı özelliklere sahip cihaz başına 20 $ 'dan piyasa değerinden birkaç kat daha azdır. Şahsen, bana 2 dolara mal oldu, bir yıl önce bu amaçlar için bir arduino stoğu satın alındı, sadece bir modül yoktu.
Aşağıda ekli arşivde, arduino için bir taslak, farklı işletim sistemleri için MultiWiiConf kurulum programı, bir devre kartı dosyası (açmak için SprintLayout'a sürüm 6'dan daha az değil) ve evde lazer yazıcısı olmayanlar için PDF formatında bir baskılı devre kartı ( % 100'de yazdırmanız gerekir).
Çalışmanızdaki herkese iyi şanslar!