


İyi günler, bu sefer Lego'dan ağır yükleyici modeli yapma hakkındaki talimatları paylaşmak istiyorum. Her zamanki gibi elektrifikasyon - Arduino. model Lego 42079 AĞIR HİZMET FORKLIFT temelinde yapılmıştır. Modelimizin beyni Arduino Nano v3, Bluetooth üzerinden kontrol olacak. Kontrol için, bir Android telefon veya tablet veya bağlı bir Bluetooth modülüne sahip başka bir Arduino kartı kullanabilirsiniz.
Ev yapımı yükleyici video
İhtiyacınız olan her şeyin listesi oldukça uzundur:
- Lego Technic 42079 veya 42029
- Lego Teknik 42033
- Mega 328'de Arduino Nano v3
- L9110S motor sürücüleri 2 adet.
- Servo SG-90
- Bluetooth modülü HC-06, HC-05 veya eşdeğeri
- Mini dişli motor 50 rpm
- Mini motor şanzıman 100 rpm
- Motor şanzıman 6v 150 rpm
- Beyaz LED 2 adet.
- Direnç 150 Ohm 2 adet.
- Kondansatör 10v 1000uF
- Tek sıralı tarak PLS-40
- İndüktör 68mkGn
- 4 NI-Mn 1.2v 1000mA pil
- Bağlayıcı baba-anne iki pimli tel
- Homutik
- Farklı renkteki teller
- Lehim, reçine, havya
- Pil A23 veya A27
- Cıvatalar 3x20, somunlar ve pullar
- 3x40 cıvatalar
- Cıvatalar 3x60
Adım 1 Davayı monte ediyoruz.
İlk önce talimatları indirmeniz gerekiyor Lego 42079 resmi web sitesinden:
Lego talimatını açtıktan sonra, 1'den 40'a kadar tüm puanları topluyoruz. Sadece dişli (müdahale edecek), diferansiyel, diz mili koymayın. Ardından, 56 ila 75 arasındaki adımları dahil edin. Bu temel olmalıdır:
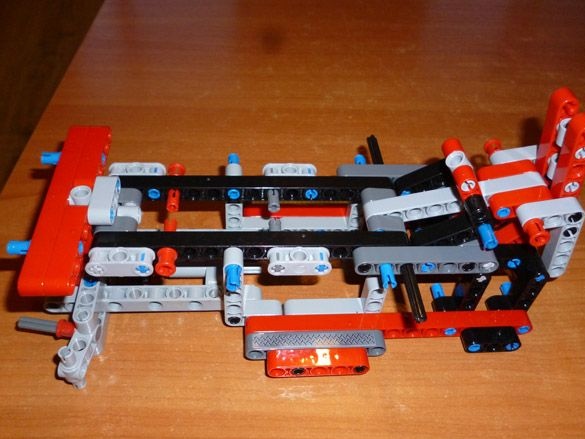
Sonra 95 ila 15 arasındaki adımları dahil ediyoruz. Aşağıdakileri alıyoruz:
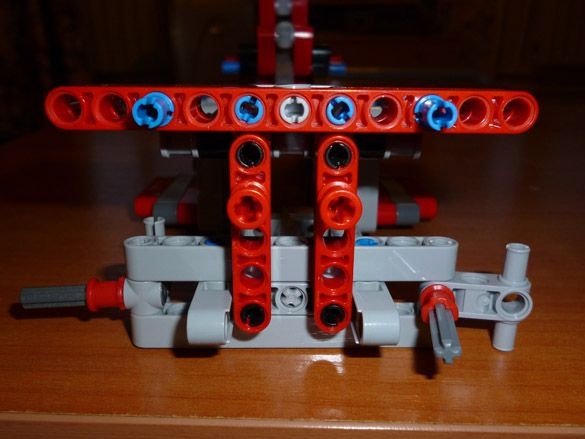
Ve önden görünüm:
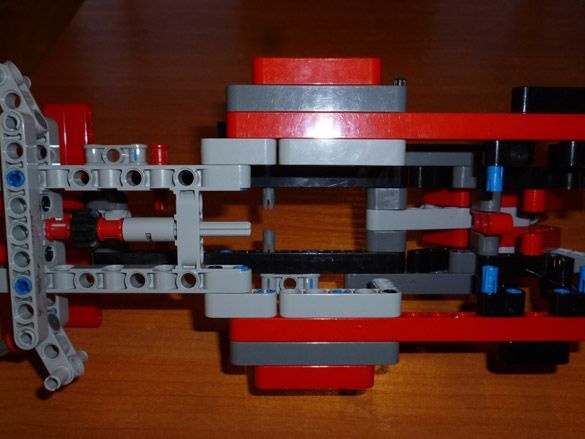
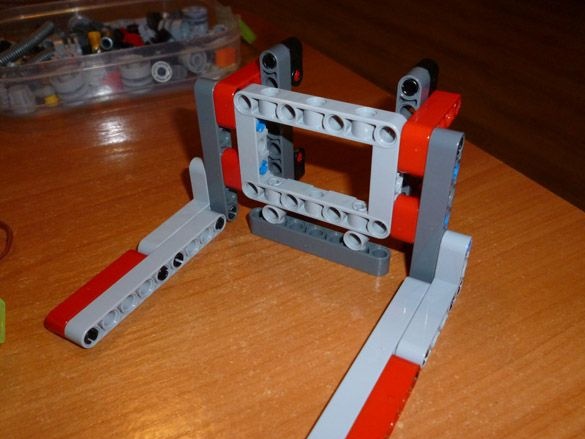
Eğim mekanizması fotoğraftaki gibi hafifçe yeniden yapılır:

Dirgenleri topluyoruz, bunlar 183 ila 192 adımları.
116 ila 158 dahil Lego talimatları adımlarına göre ayrıntıları ekleyin:

Ve aşağıda şöyle görünüyor:

Ayrıca paleti fotoğraftan toplamalısınız:

Adım 2 Motor Ekle.
Önde gelen eksenin hareketini uygulamak için, 150 rpm dönüş hızına sahip bir dişli motoru ve 6 voltluk bir motor alıyoruz. Vites kutusunun çıkış milleri kesilir ve onlara standart bir Legovsky parçası şeklinde verilir:

Çapraz şekilli miller yaparken lego bağlantı manşonlarını takmayı deneyin. Bağlantı manşonları yeterli derinliğe getirildiğinde, dişli motorunu resimde gösterildiği gibi muhafazaya yerleştirin. Ve hemen tekerlekleri takın:
Motor dişlisinin kendisi 3x60 cıvatalarla gövdeye sabitlenir.
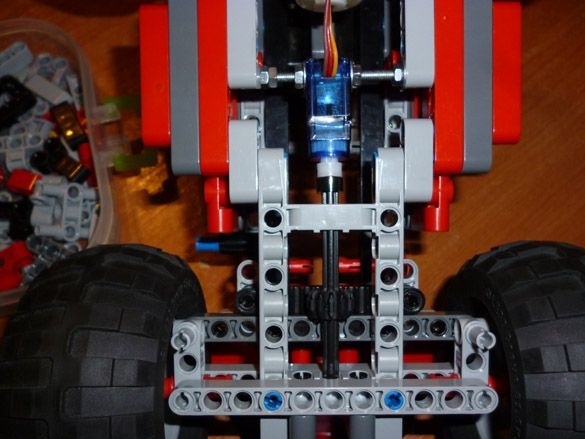
Şimdi döner mekanizmaya geçiyoruz. Onun için bir servo SG-90'a ihtiyacımız var. Metal dişlilerle seçim yapmak daha iyidir. Başlamak için, servo sürücüyü monte etmek için tasarlanan kasanın çıkıntılı kısımlarını kesmemiz gerekiyor. Ayrıca kasanın alt kısmında bir delik açın.3mm'lik bir matkap kullanabilir veya sadece bir bıçakla kesebilirsiniz, asıl şey servonun içine zarar vermemek için dikkatli bir şekilde yapmaktır:

Lego parçalarıyla bağlamak için servodaki en küçük kolu alın ve küçük lego parçasını vidalayın. Şöyle görünmelidir:

Ortaya çıkan kısmı servoya koyduk:

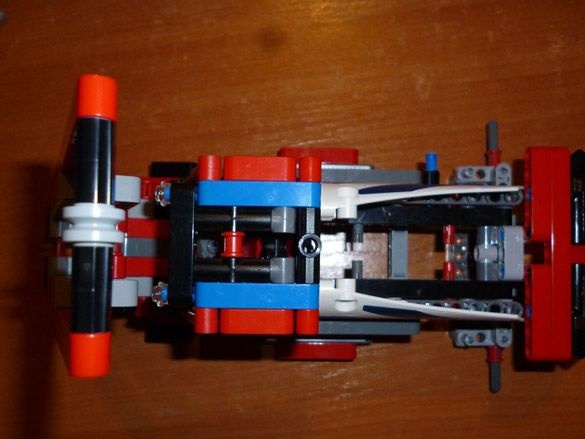
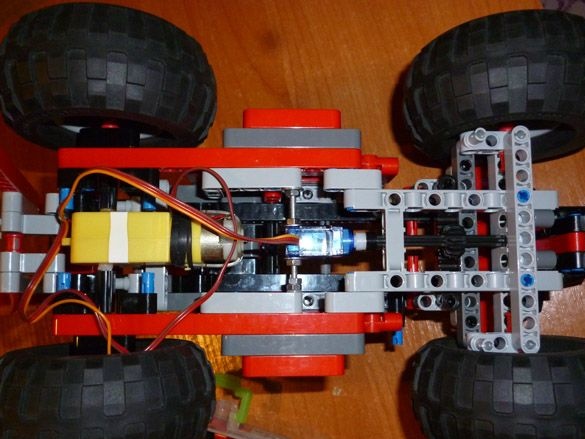
Servoyu modelin alt kısmında, yaklaşık ortada sabitliyoruz. Sabitlemek için 3x60 cıvata kullanıyoruz. Sonra lego şaftını yerleştiririz ve üzerine tekerlekleri döndüren bir dişli koyarız:
Dört tekerleği de taktık:
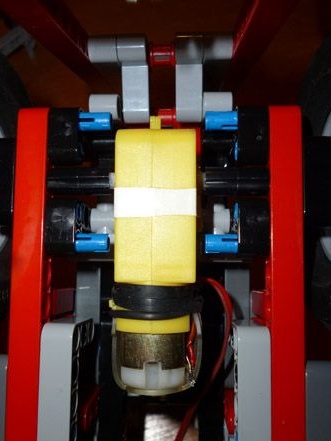
Kaldırma mekanizmasına geçiyoruz. Bunun için 50 rpm hıza sahip bir mini dişli motor alıyoruz. Böyle bir motor şanzımanının çıkış mili 3 mm'dir, Legovsky bağlantı kovanı için çok uygundur. Sabitleme için sadece bir kibrit parçası eklemek gerekir. Ayrıca, motoru legoya bağlamak için şekilde gösterildiği gibi metal yapıcıdan parçayı bükün:

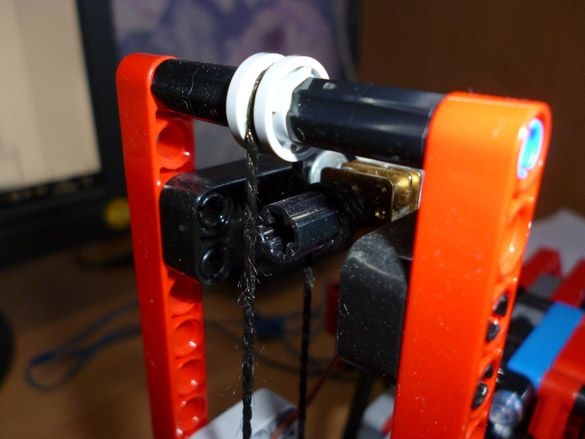
Şimdi mini dişli motorunu fotoğrafta gösterildiği gibi kaldırma mekanizmasının üst kısmına yerleştirin. Kalın bir iplik alıyoruz, üst silindirden atıyoruz, sonra motordan bağlantı manşonuna sarıyoruz (üç ila dört tur) ve alt silindirden geçiriyoruz. Bu şekilde olmalı:
Çatalları tasarımımıza koyarız ve ipliğin uçlarını çatallara bağlarız:
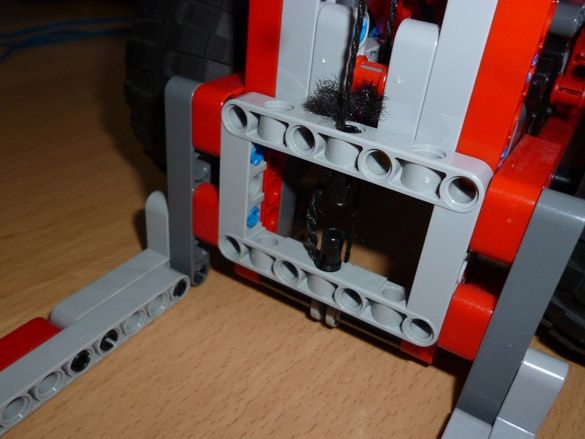
Kaldırma düzeneğinin tamamı şöyle görünür:

Şimdi eğim mekanizmasına geçelim. Onun için servo SG-90'ı alıyoruz. Tercihen yanmış elektronik ile. Söküyoruz ve kontrol kartını çıkarıyoruz, kabloları doğrudan motora lehimliyoruz. Daha fazla söküyoruz ve en büyük dişliyi çıkartıyoruz, kısıtlayıcı projeksiyonları alttan kesip yerine koyuyoruz. İlk servo sürücüde olduğu gibi, montaj için tırnakları kesmek ve delik açmak da gereklidir. Dönüştürülen servo legov ayrıntılarına eklenir:

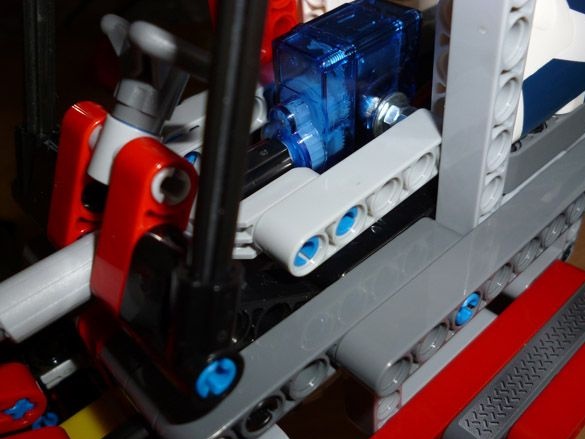
Mekanizmayı kabinin içine yerleştirdik:
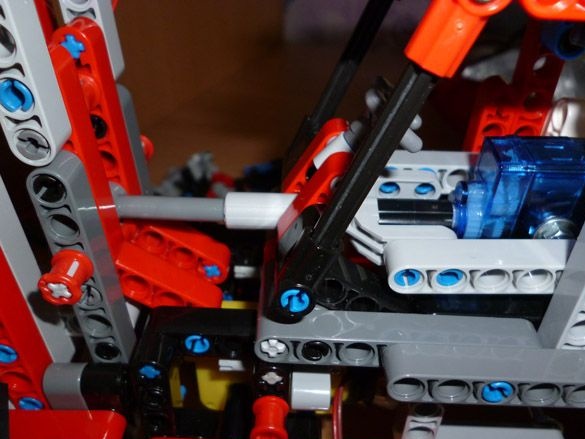
Ve ucu kaldırma mekanizmasına bağlıdır:

Adım 3 Programlama ortamının hazırlanması.
Eskizlerin düzenlenmesi ve doldurulması Arduino IDE aracılığıyla yapılır. Bu programın resmi site ve yükleyin.
Ardından, çizimde kullanılan programlama ortamına iki kütüphane eklemeniz gerekir. Servo.h, servolar ile çalışmak için bir kütüphane ve Bluetooth modülü ile iletişim için bir yazılım kanalı oluşturmak için SoftwareSerial.h:
İndirilen ve paketten çıkarılan arşivler, Arduino IDE'nin kurulu olduğu klasörde bulunan “kütüphaneler” klasörüne taşınmalıdır. Diğer şekilde, yani arşivleri açmadan, onları programlama ortamına ekleyebilirsiniz. Arduino IDE'yi başlatın, menüden Eskiz - Bağlantı Kütüphanesi'ni seçin. Açılır listenin en üstünde ".Zip kitaplığı ekle" öğesini seçin. İndirilen arşivlerin yerini belirtiyoruz. Tüm adımlardan sonra, Arduino IDE'yi yeniden başlatmanız gerekir.
Adım 4 Bluetooth modülü.
Bugün için en uygun fiyatlı Bluetooth modüllerinden birini alacağız - HC-05 veya HC-06. Hem Çin mağazalarında hem de Rus pazarında dolu. Çok fazla farklılıkları yok: NS-05 hem ana modda (bağımlı) hem de bağımlı modda (ana) çalışabilir. NS-06 sadece bir bağımlı cihazdır.
Kısaca modüllerin özellikleri:
- Bluetooth çipi - BC417143 tarafından üretilmiştir
- iletişim protokolü - Bluetooth Spesifikasyonu v2.0 + EDR;
- etki yarıçapı - 10 metreye kadar (güç seviyesi 2);
- SPP'yi destekleyen tüm Bluetooth adaptörleri ile uyumludur;
- Flash bellek miktarı (bellenim ve ayarları saklamak için) - 8 Mbit;
- radyo sinyalinin frekansı - 2.40 .. 2.48 GHz;
- ana bilgisayar arayüzü - USB 1.1 / 2.0 veya UART;
- güç tüketimi - iletişim sırasındaki akım 30-40 mA'dır. Ortalama akım değeri yaklaşık 25 mA'dir. Bağlantı kurulduktan sonra, tüketilen akım 8 mA olur. Uyku modu yok.
Modülün doğru çalışması için bağlamadan önce yapılandırmanız gerekir. Ayar, AT terminal kutusuna girilen komutlar verilerek yapılır. HC-05'i özelleştireceğiz. Diğer modüller için komutlar farklı olabilir. Bilgisayarı ve Bluetooth modülünü Arduino üzerinden bağlayacağız. Arduino'da aşağıdaki çizimi doldurun:
Bu çizim, Bluetooth modülüne AT komutları göndermek için gereklidir. Arduino, terminalde yazılan her şeyi Bluetooth iletişim modülüne aktarır. Şimdi ve gelecekte modülü SoftwareSerial kütüphanesi aracılığıyla bağlayacağız. İndirme bağlantısı ve kurulum talimatları önceki adımdaydı.Yüksek hızlarda kütüphane kararsızdır. İletişim hızıyla ilgili sorunlarla karşılaşırsanız, modülü doğrudan Arduino'nun RX ve TX kontaklarına bağlayabilirsiniz. Bu durumda çizimi düzeltmeyi unutmayın. Bu durumda, modülle 9600 hızında çalışacağız. Bu nedenle, çizimi doldurduktan sonra terminal penceresini açın ve aşağıdaki komutları girin:
“AT” (tırnak işaretleri olmadan) “OK” cevabı gelmelidir (her şeyin doğru bağlandığı ve modülün çalıştığı anlamına gelir)
“AT + BAUD96000” (tırnak işaretleri olmadan) “OK9600” cevabı gelmelidir.
Doğru cevabınız varsa, bir sonraki adıma geçin.
Adım 5 Yönetme elektronik.
Modelimizi canlandırmak için Arduino Nano v3 ve Bluetooth modülünü ve iki L9110S motor sürücüsünü kullanacağız.
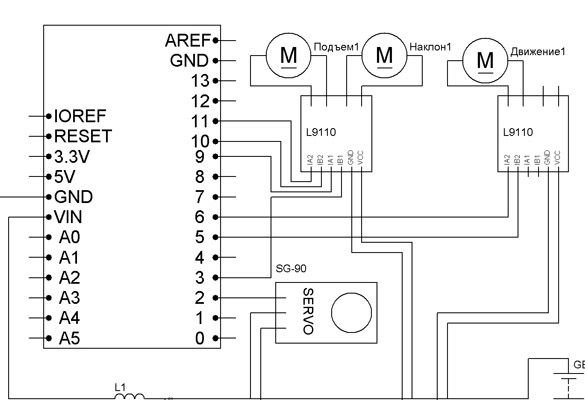
Bileşenleri bağlamak için uçlarında Dupont dişi konnektörlü kablolar kullanacağız. Beslenme için iki seçeneği deneyebilirsiniz. İlk olarak, seri olarak bağlanan 6 NI-Mn 1.2v 1000mA pil, daha sonra hem Arduino hem de motorlar onlar tarafından güçlendirilir. Arduino için, güç devresine daha büyük kapasiteli bir 10 V kapasitör ve bir indüktör dahil edilmelidir. Mikrodenetleyicinin gücünü stabilize etmek için bu gereklidir. El fenerleri için, iki LED'in anotlarını 4 pinli Arduino'ya, katotları GND'ye bağlayın. Kullanılan LED'ler için direnç seçilmelidir. İkinci seçenek: ayrı yiyecek. Sonra motorlar için elektrik bandı ile sarılmış aynı pilleri kullanırız:

Ve Arduino için pil A27 veya A23:

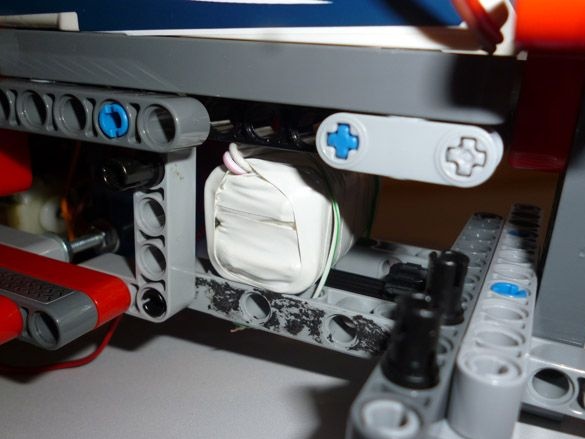
Güvenilirlik için pili ısı büzüşmesine yerleştirin.
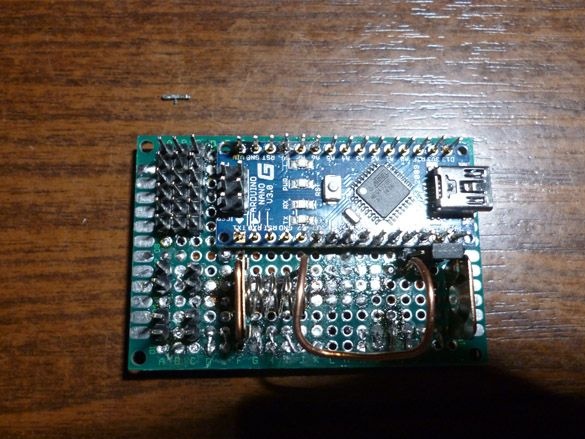
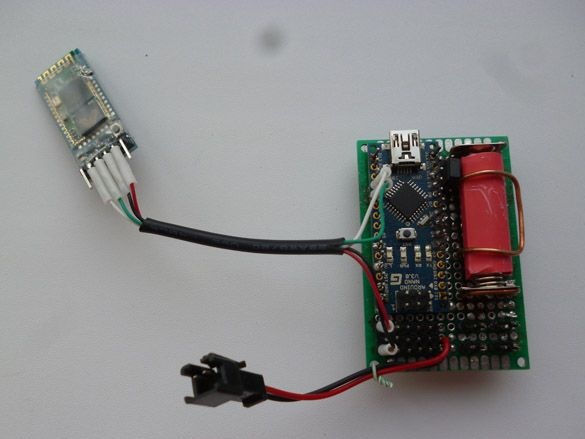
Tabii ki, her şeyi şemaya göre sadece "ağırlık" üzerinde bağlayabilirsiniz, ancak hepsini devre kartında yapmak daha iyidir. Arduino Nano'yu yukarıdan lehimliyoruz, pil için bir yer ve diğer elementlere güç vermek için sonuçlar:
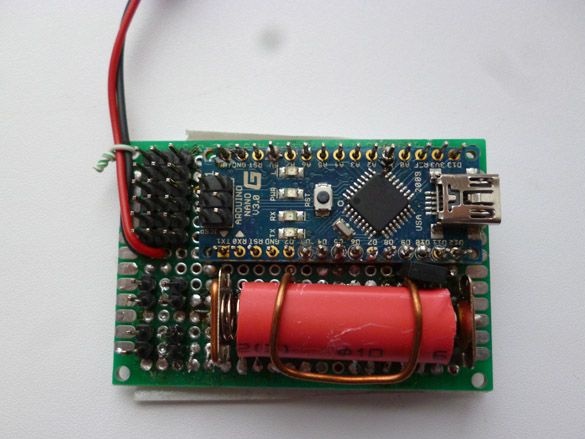
Pili tasarlandığı yere koyduk:
Aşağıdan, her şeyi raylara lehimleyebilirsiniz, ancak sadece yalıtımdaki tellerle daha hızlı olabilir:
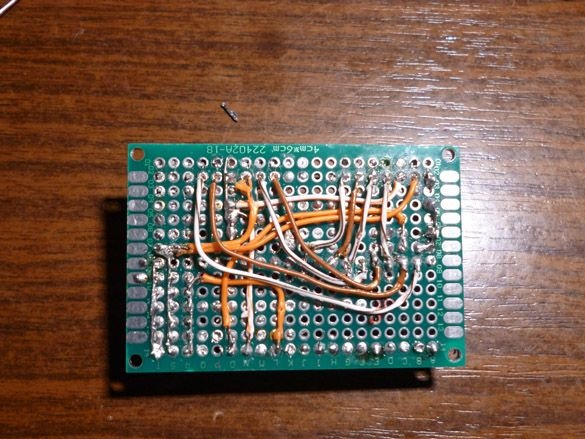
Sürücü kontaklarını bu kartın altına takıp lehimliyoruz:
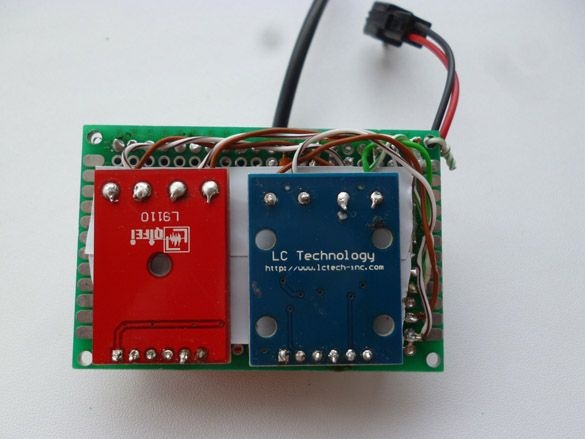
Kompakt ve güvenilir teller ortaya çıkıyor.
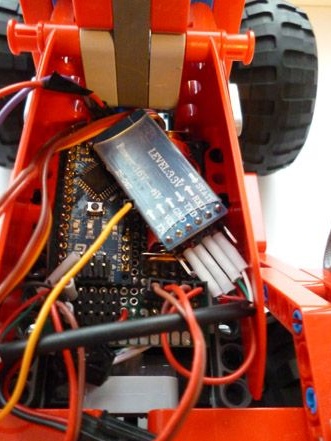
Tüm elektrikler kabinin arkasına yerleştirilir:

Aşağıdaki pilleri tamir ediyoruz:
Bluetooth modülünü aşağıdaki gibi bağlarız:
Arduino Nano - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Ve kartı modülle birlikte kendileri için tasarlanan yere yerleştiriyoruz:
Adım 6 Kontrol Paneli Kurulumu.
Uzaktan kumanda olarak, bir Android telefon veya tablet, Windows çalıştıran bir bilgisayar veya arduino'da el yapımı bir uzaktan kumanda kullanabilirsiniz. Android'deki sürümle başlayalım, bunun için robot kontrol programını Bluetooth üzerinden yüklemeniz gerekecek. Google Play'de “Bluetooth Arduino” yazın ve istediğiniz programı yükleyin. BT Kontrolörünü tavsiye ederim. Ardından, Android ayarları aracılığıyla Bluetooth modülü ile bir bağlantı kurarız. Bağlantı şifresi “1234” veya “0000” dır. Ardından, programı uygun komutlar için yapılandırın. Liste aşağıda.
Sonraki seçenek bir Windows bilgisayardır. Terminal penceresini komut göndermek veya uygun Z-Controller programını kullanmak için kullanabilirsiniz. Bağlantı noktasını (bağlantının yapıldığı com bağlantı noktasını) seçin ve komutların anahtarlarını yapılandırın. Kurulum basittir ve size fazla zaman ayırmaz.
Ve son olarak, üçüncü seçenek ve bence en iyisi, fiziksel bir uzaktan kumandanın kullanılmasıdır, çünkü o zaman düğmelerin tıklandığını hissedersiniz. Benimkini izleyerek uzaktan kumanda etmenizi tavsiye ederim talimatlar.
Ve ekle Bluetooth modülü.
Yönetim komutları aşağıdaki gibidir:
W - ileri
S - geri
A - sol
D - sağ
F - durdur
G - direksiyon simidi
K - farlar
L - far kapalı
R - yukarı kaldırın
E - yokuş aşağı
Q - durdurma asansörü
T - kendinize eğin
Y - senden uzağa eğ
H - stop tilt mekanizması




