
Tüm elektronik severlere merhaba. Bu yazıda, istediğiniz gibi çizebileceğiniz siyah bir çizgi boyunca seyahat eden bir arama motoru robotunun nasıl yapılacağını anlatacağım. Bu kit kitinin, toplayacak olanlar için çok ilginç bir oyuncak olacağından eminim.
Uzun süre çekmeyeceğim, doğruca üretime geçeceğiz.
Makaleyi okumadan önce, bu kit kiti için ayrıntılı bir montaj işlemcisi ve performans kontrolleri ile bir video izlemeyi öneriyorum.
Siyah çizgi boyunca seyahat edecek bir arama motoru robotu yapmak için kendin yap, ihtiyacınız olacak:
* Kit
* Havya, lehim, akı
* Yan kesiciler
* Multimetre
* adaptasyon "üçüncü el" lehim için
* Pense
* Yıldız tornavida
İlk adım.
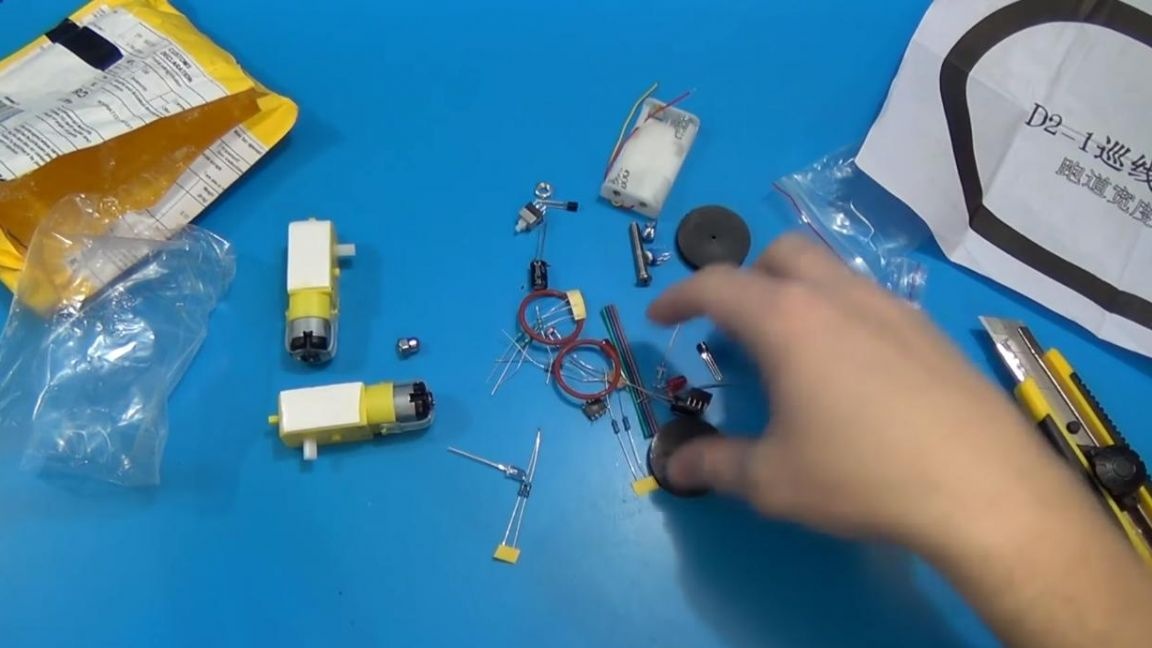
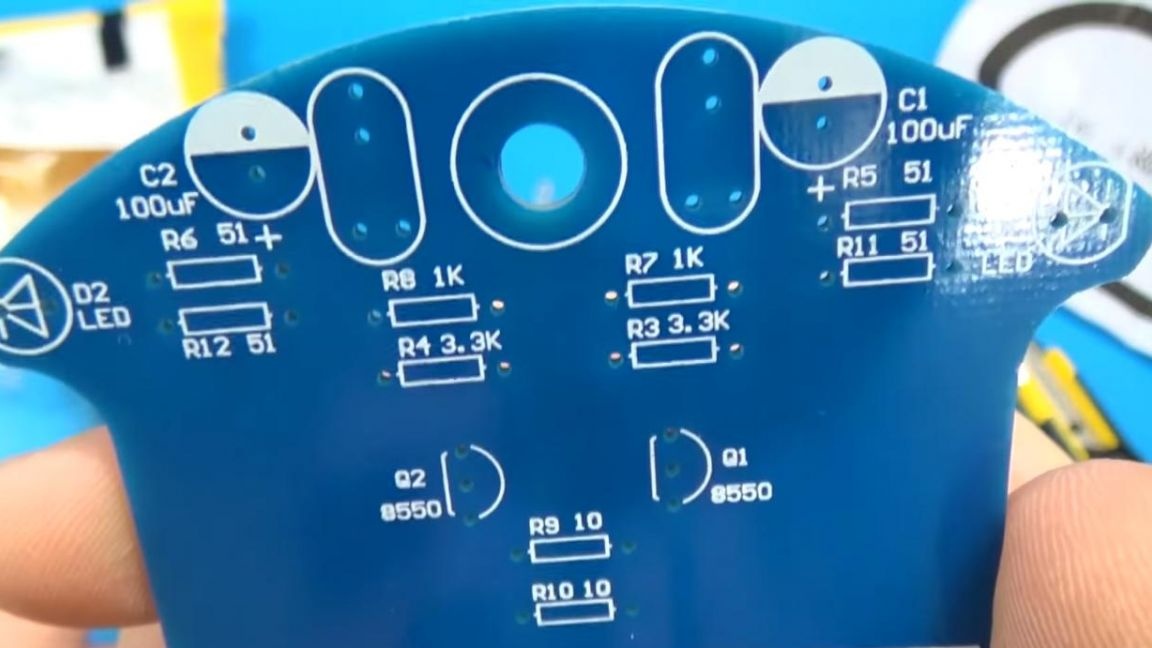
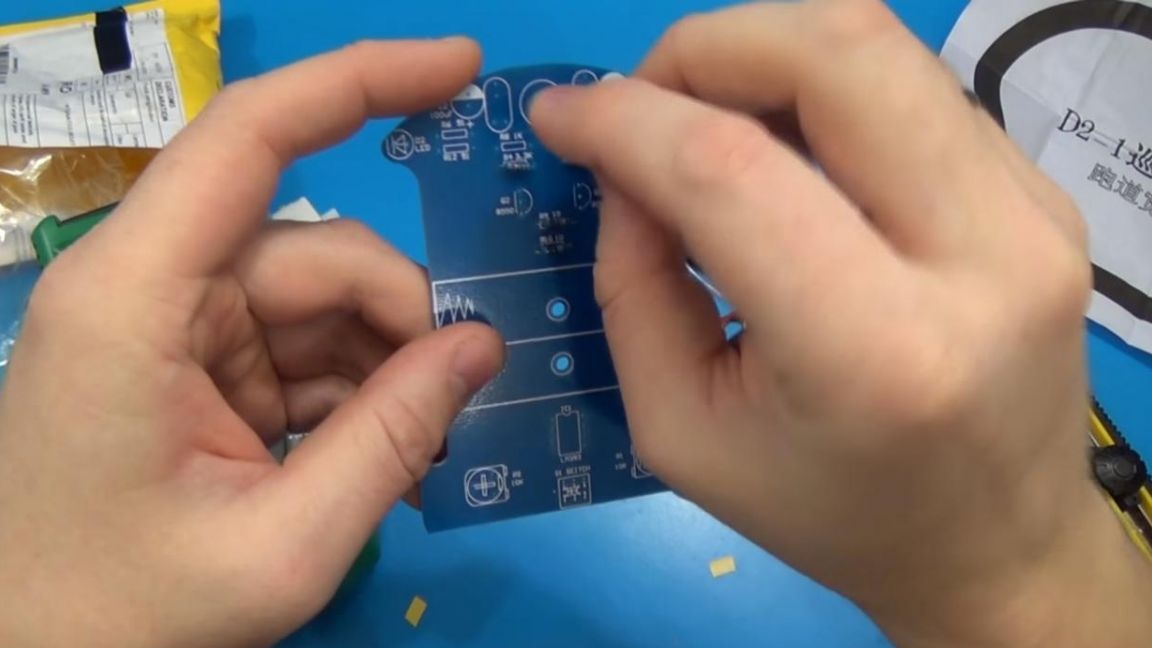
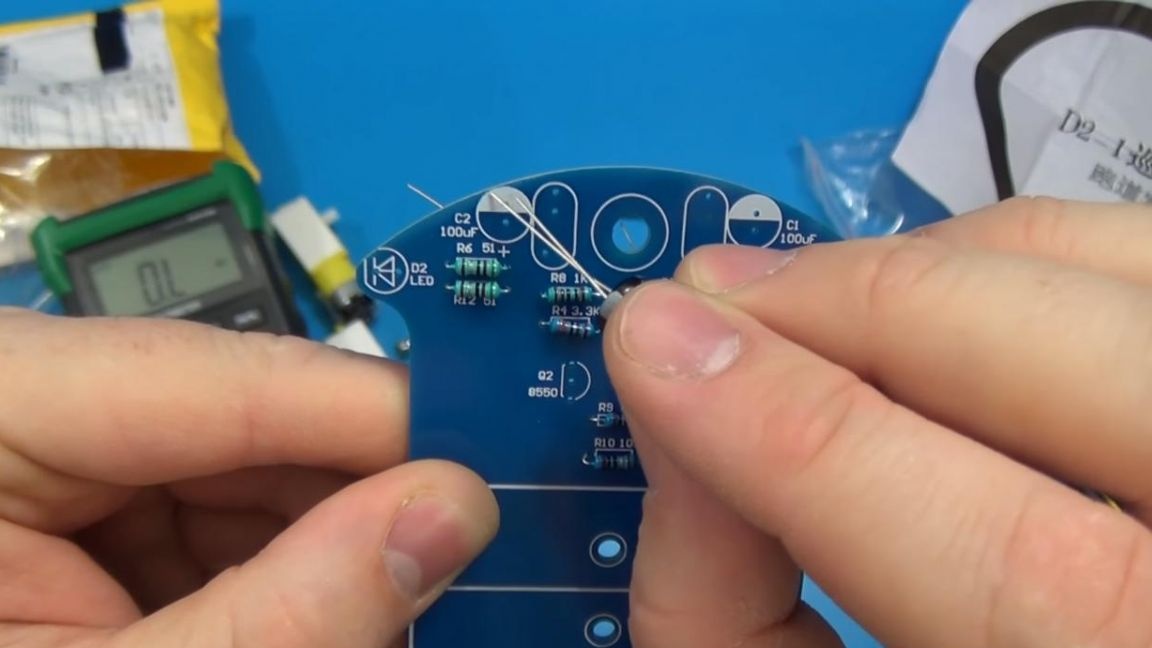
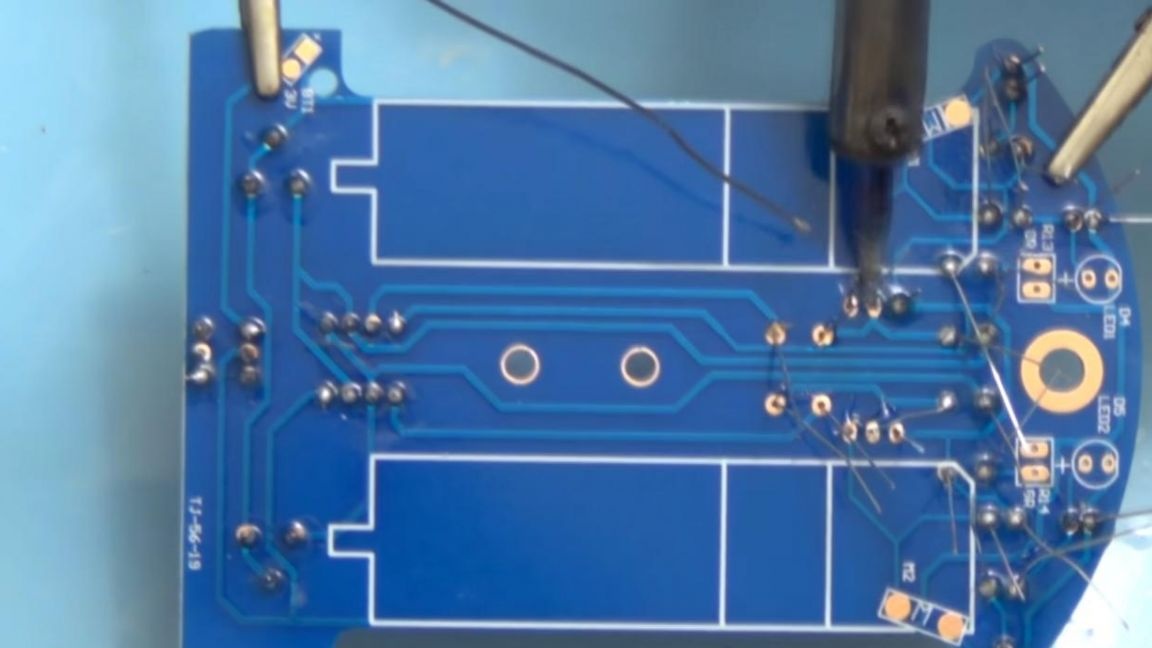
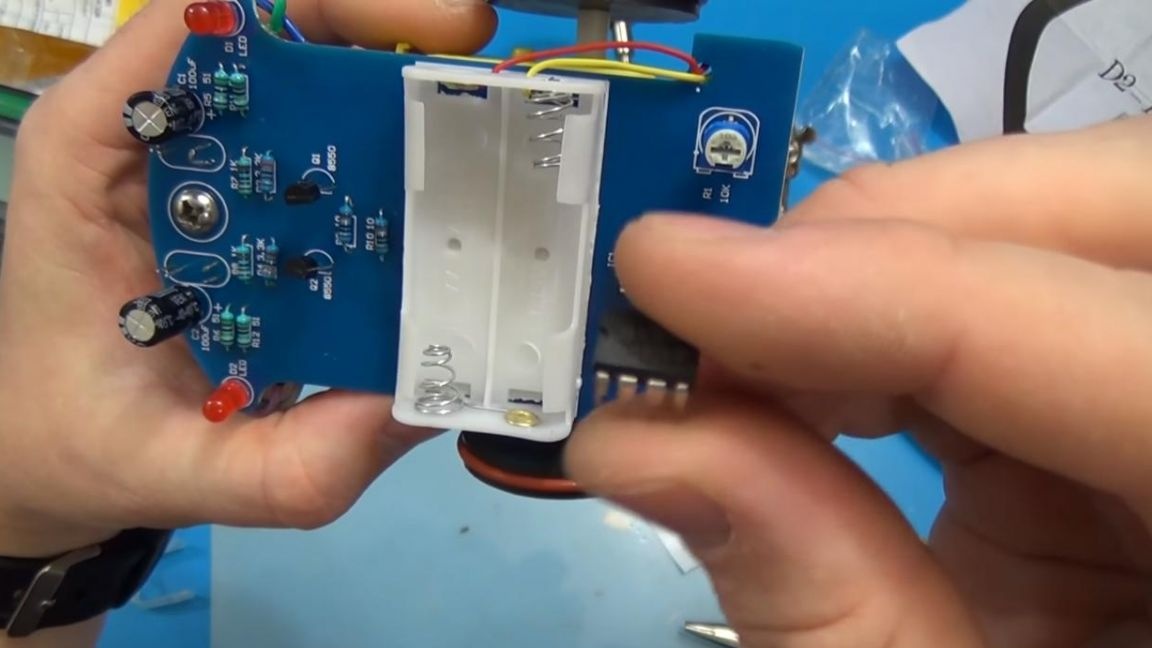
Her şeyden önce, tüm bileşenleri tahtaya yerleştirmeniz gerekir, kit hem dirençleri, kapasitörleri hem de transistörleri içerir.
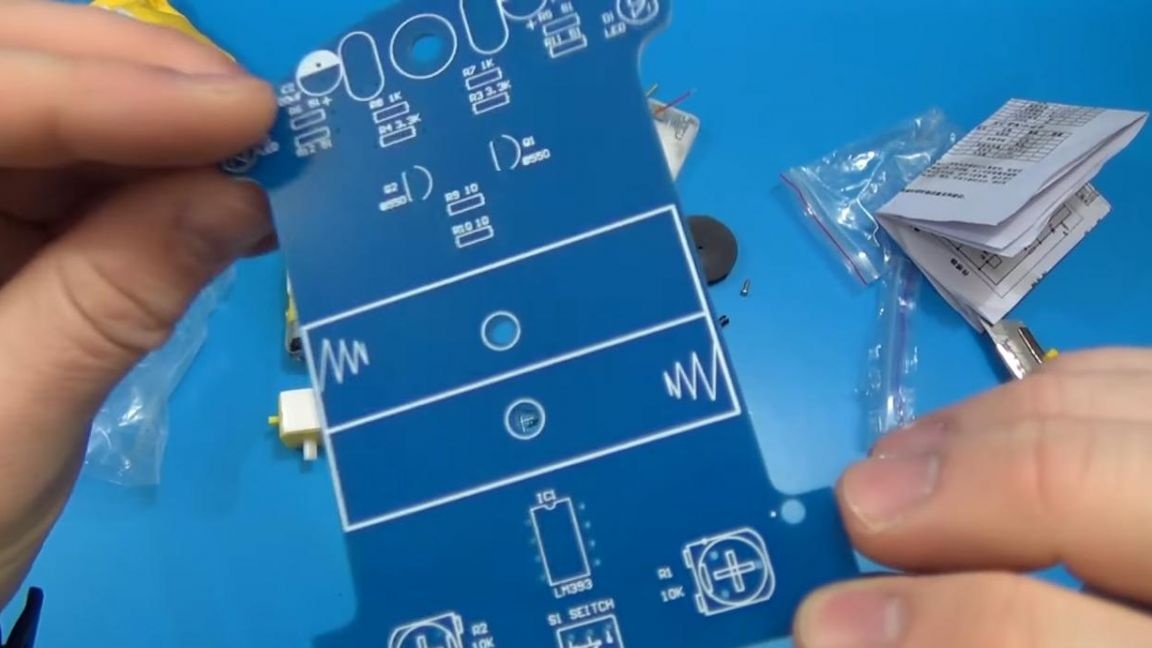
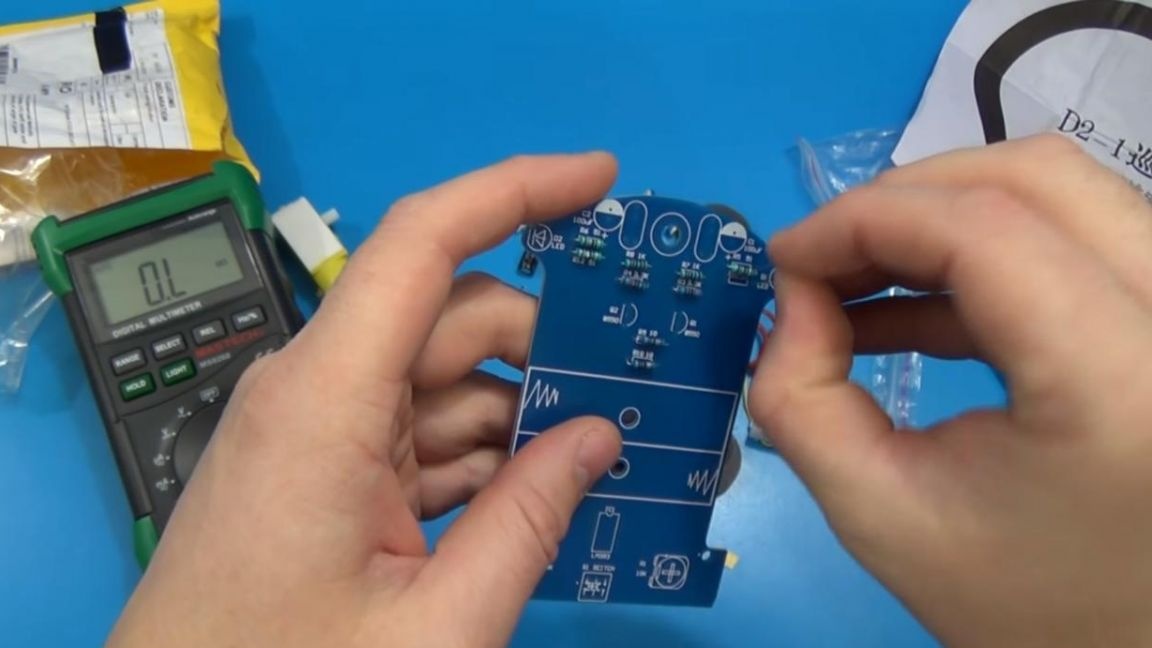
İlk önce, nominal değeri tahtada gösterilen dirençleri yerine takmanız gerekir, dirençlerin kendileri renk kodludur, bu sayede tek bir direncin direncini belirleyebilirsiniz. Ayrıca, direnç bir multimetre ile ölçülebilir, bu yöntem daha hızlı olacaktır, ancak bu bir zorunluluk olduğu anlamına gelmez. Panodaki dirençleri nominal değerlerine göre düzenleriz, ters taraftaki terminalleri hafifçe bükeriz, bu lehimleme sırasında düşmemeleri için yapılır.

İkinci Adım
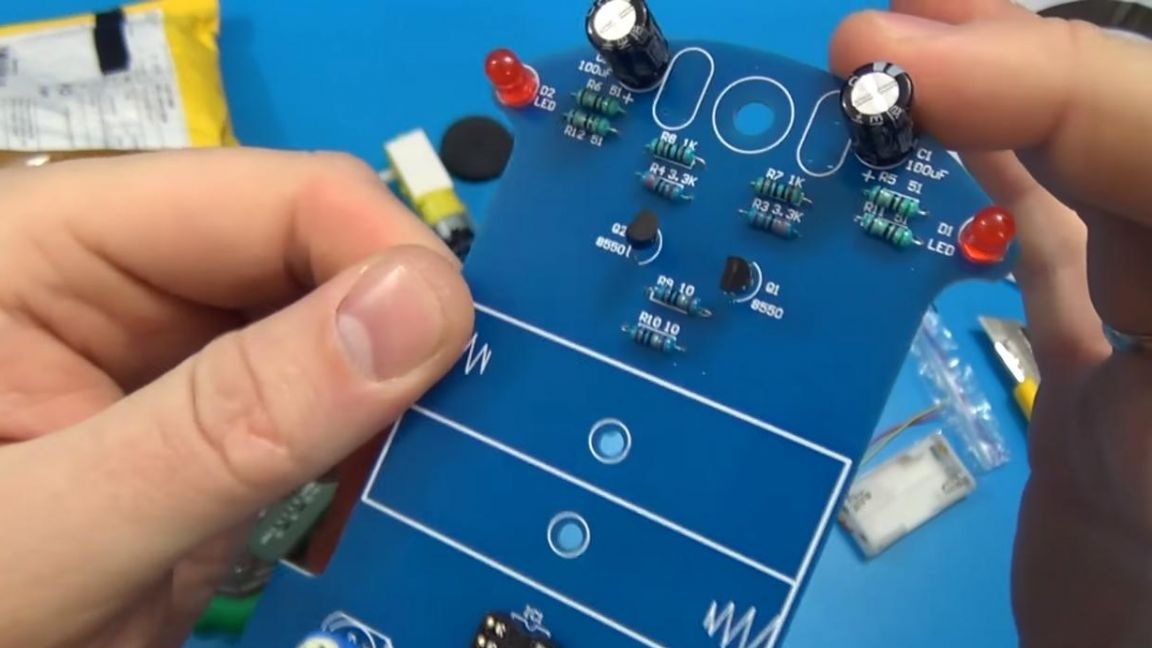
Dirençlerin hepsi yerinde, ardından kapasitörler, önceki bileşenlerin aksine, bunların polaritesi var. Kondansatörün eksi durumunda, çizgi ile beyaz bir şerit ile gösterilir; tahtada, eksi dolu bir beyaz yarım daire ile gösterilir.
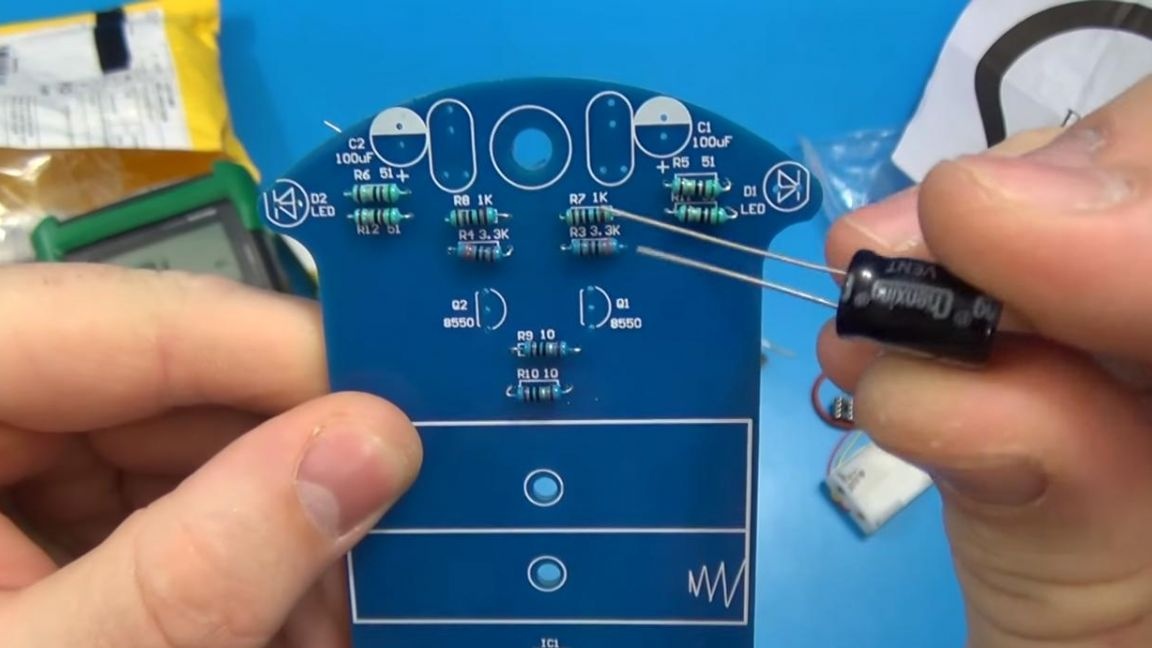
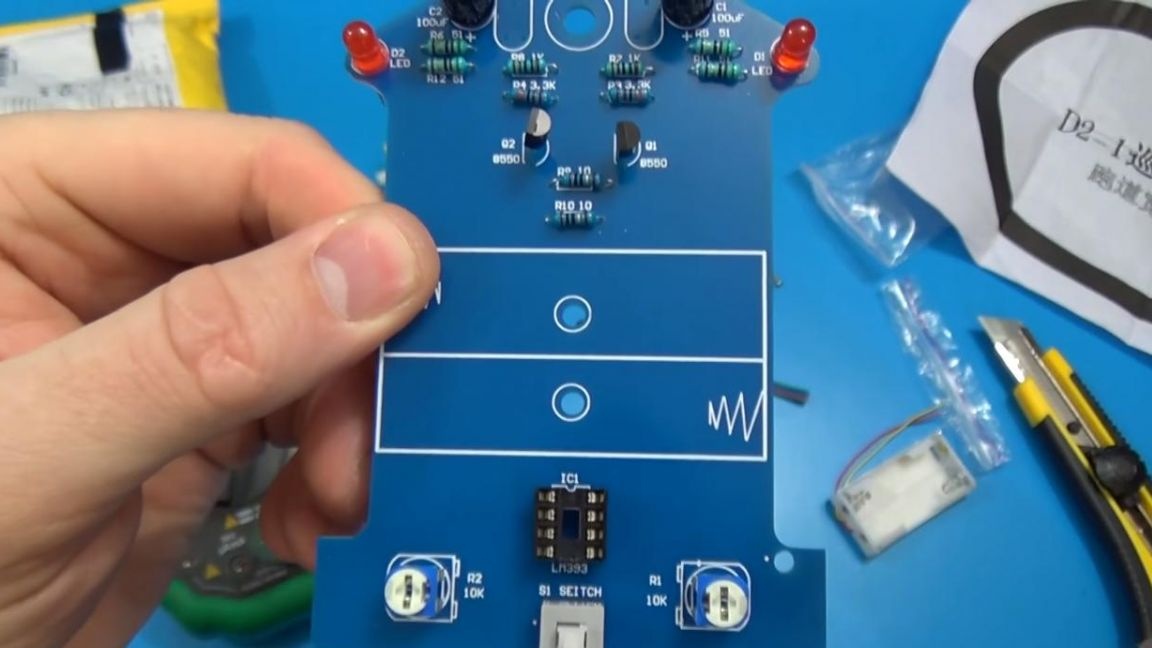
Kondansatörler yerlerinde olduğunda, transistörlere yöneliriz, onlar bizim için aynıdır, bu yüzden birbirimizle karışamayız. Bunları tahtaya düzgün bir şekilde yerleştirmek için transistörün düz kısmını tahtadaki bir çizgi ile birleştirmeniz gerekir.
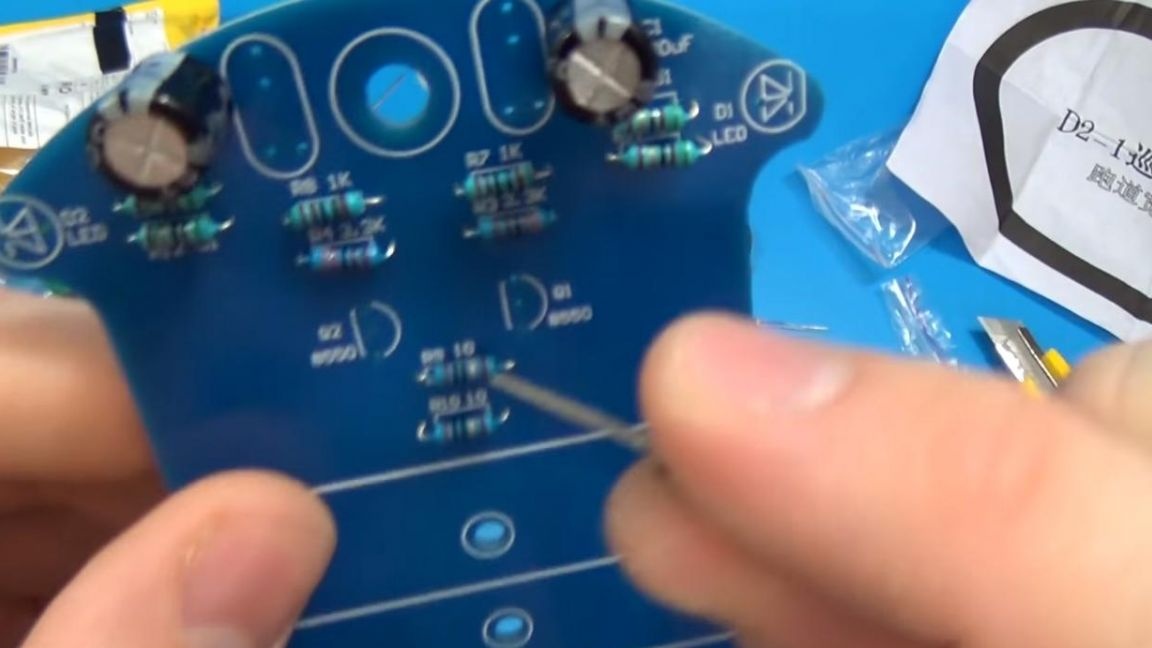
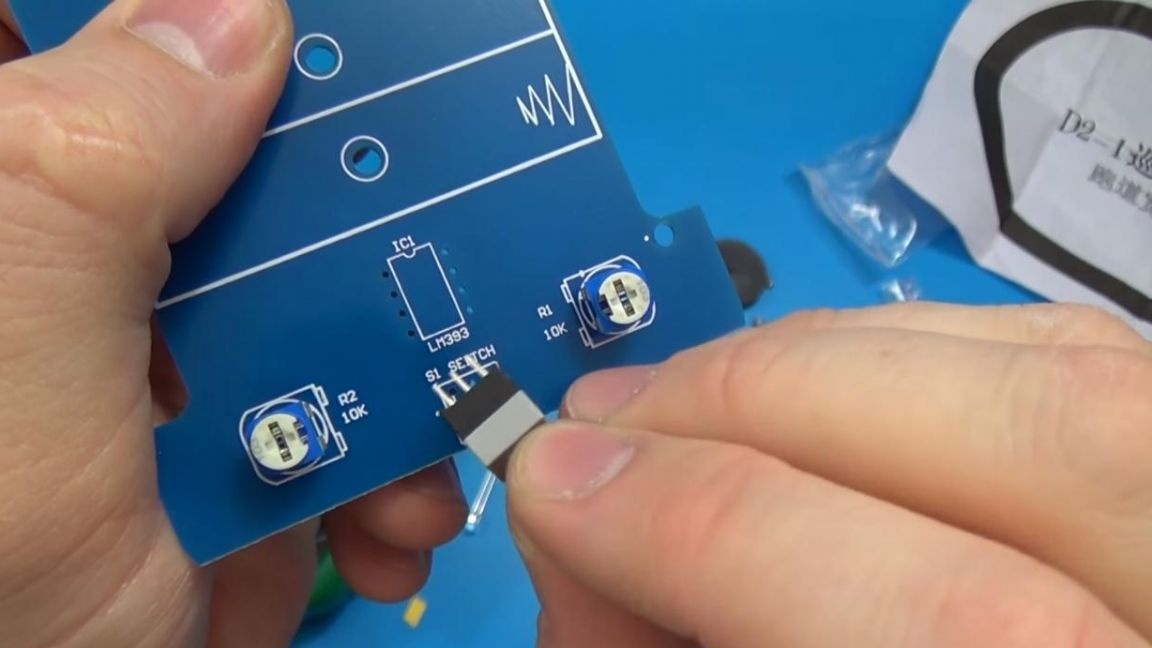
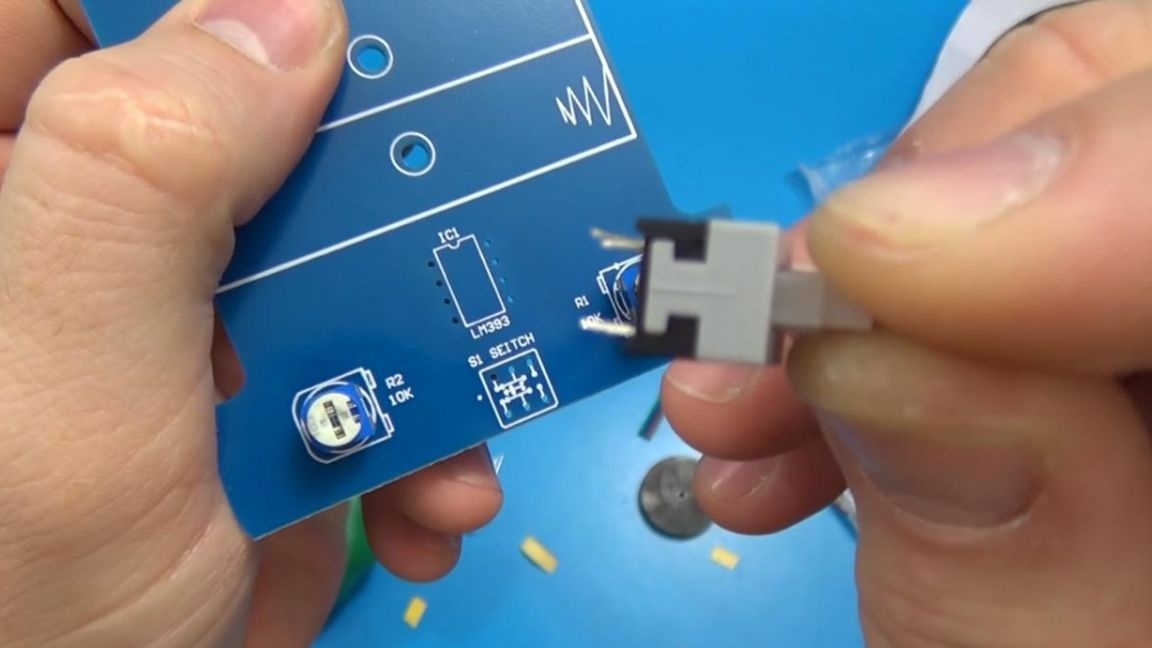
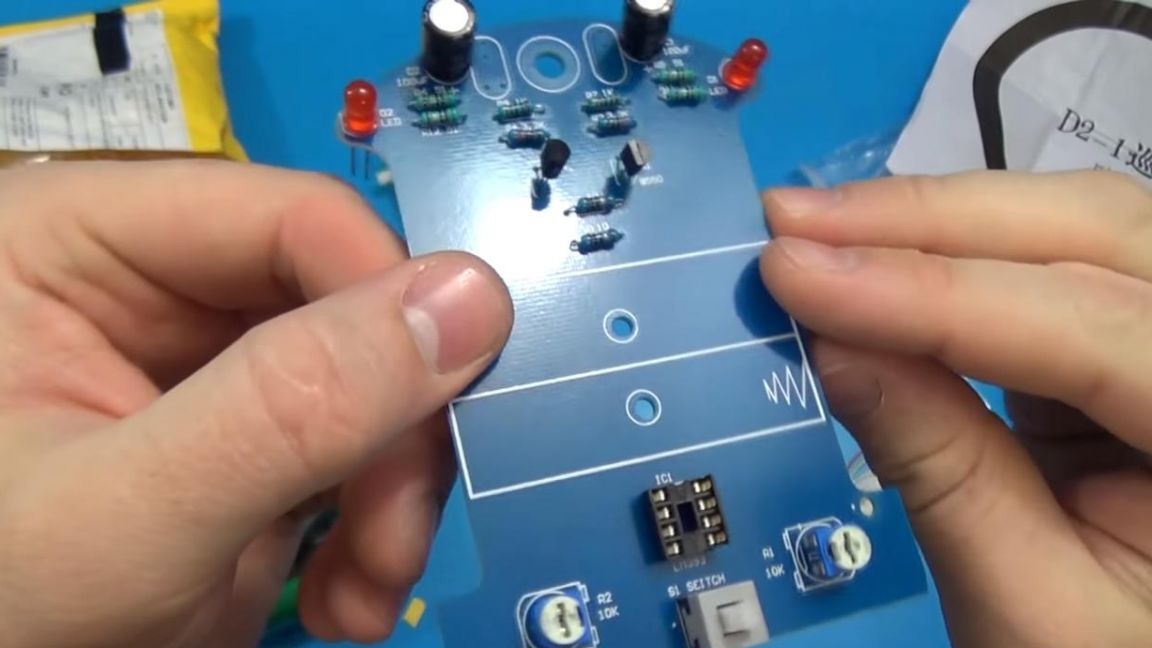
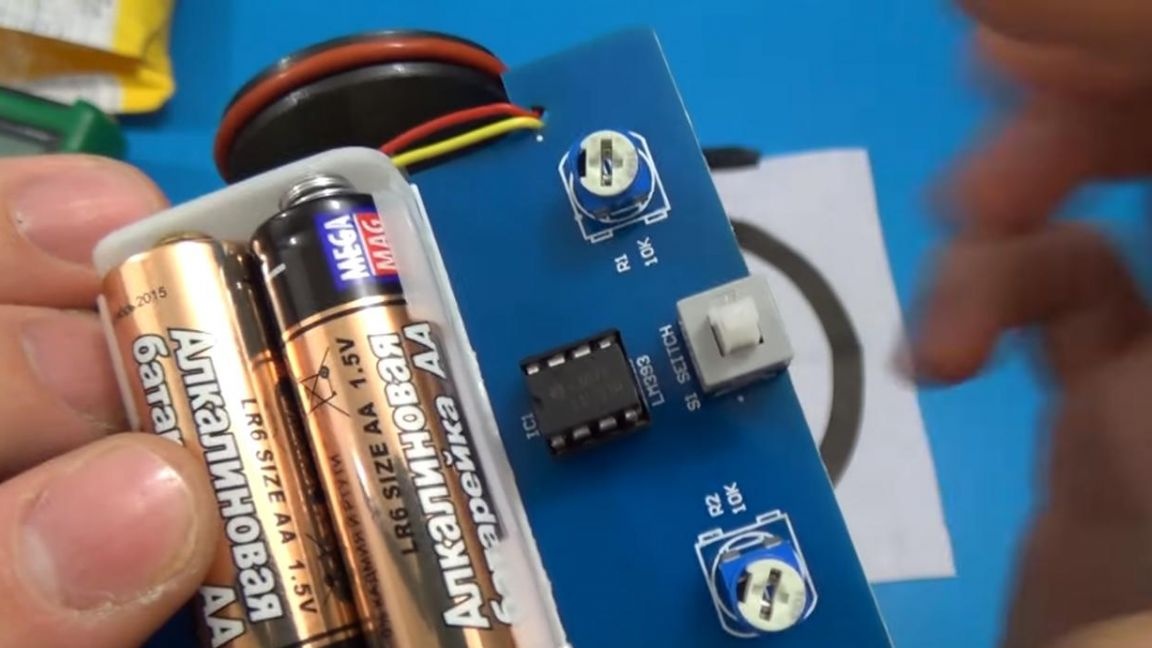
Daha sonra iki ayar direnci takıyoruz, terminallerin konumu ile bağlantılı olarak yanlış yerleştirmek için işe yaramayacak, bu iyi. Ayrıca güç düğmesini de yerleştiriyoruz, açık-kapalı, yani açık veya kapalı konumda olabilir, doğru konumu, şeridin düğmedeki konumunun tahtadaki bir nokta ile çakışmasına karşılık gelir.
Üçüncü Adım
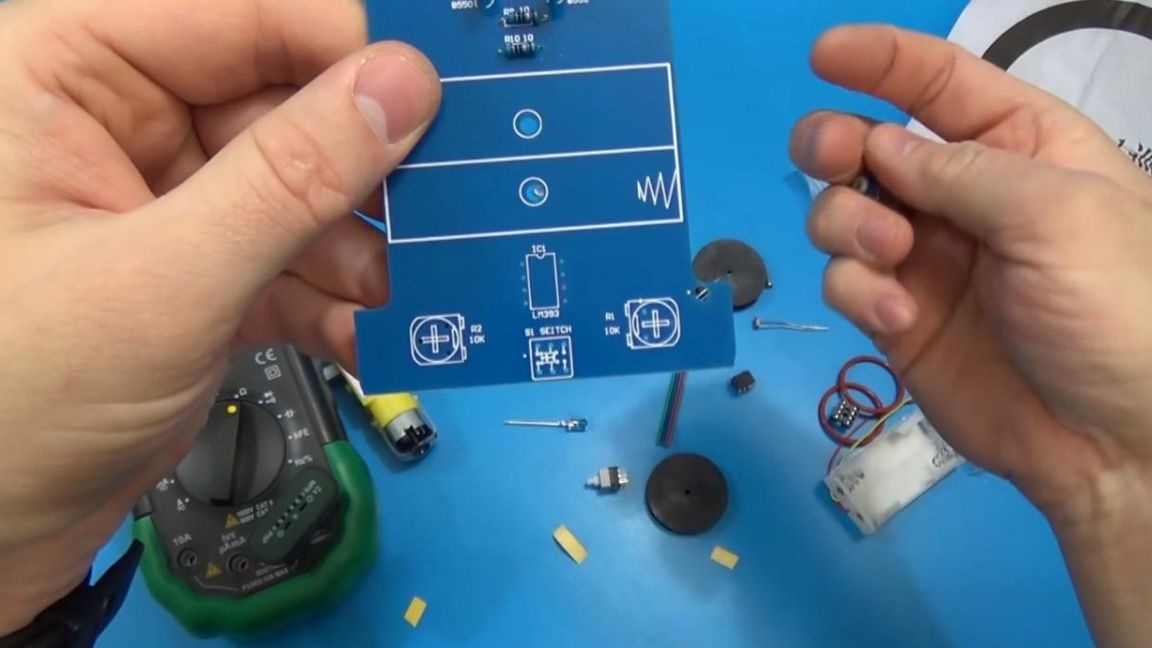
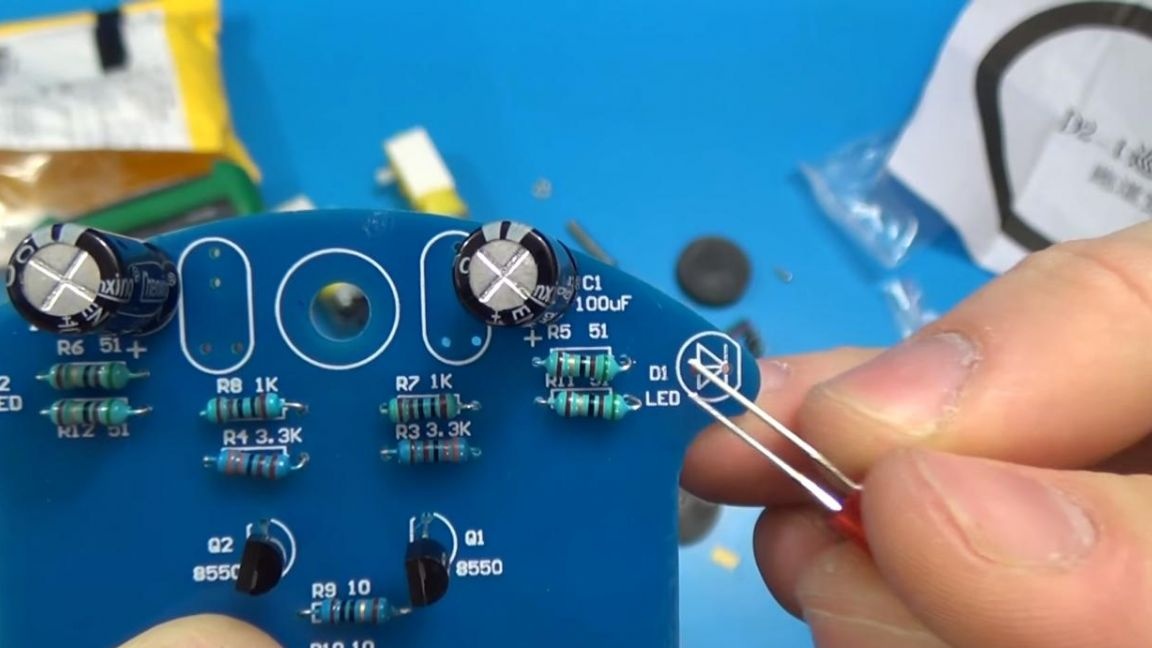
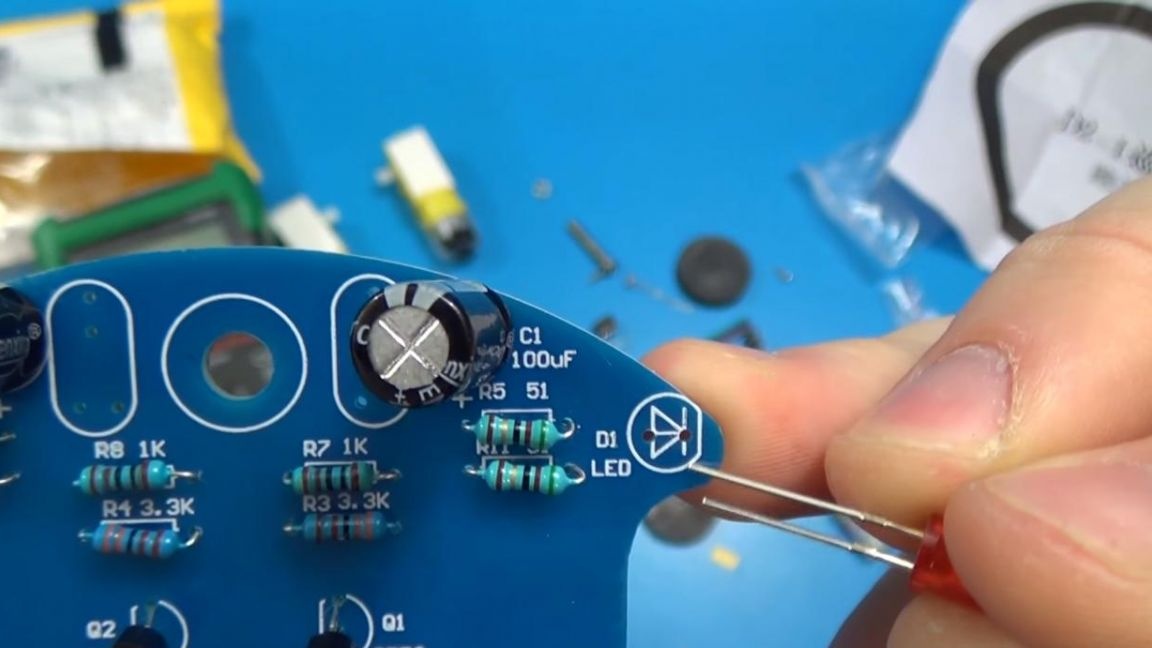
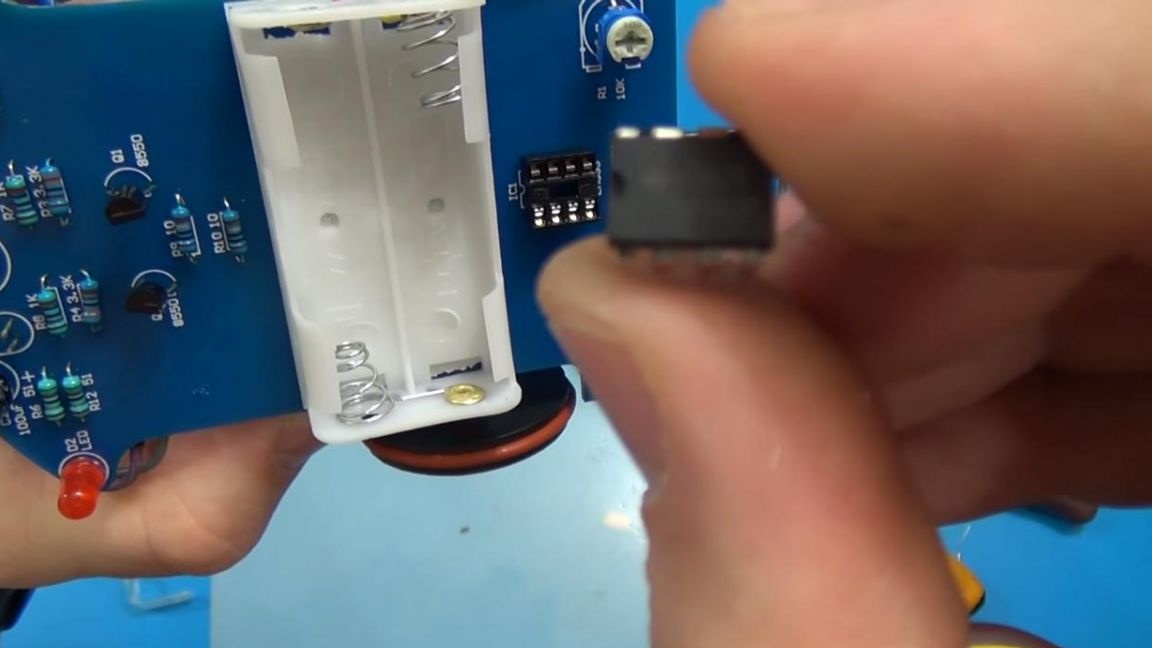
LED'lerle baş etme zamanı, kitte dört tane var, ikisi kırmızı ve iki beyaz. Tahtada, artı bir üçgen ile gösterilir, LED'de uzun bir çıktıdır, eksi her şey açıktır. Kırmızı LED'leri üste yerleştiriyoruz, "dönüş sinyallerinin" analogları.Mikro devre için ayrı bir yer var, konektörü oraya yerleştiriyoruz, bu yüzden değiştirmek bu durumda çok daha kolay olacak, ancak lehimleme sırasında kontaklar aşırı ısınmayacak.

Dördüncü Adım
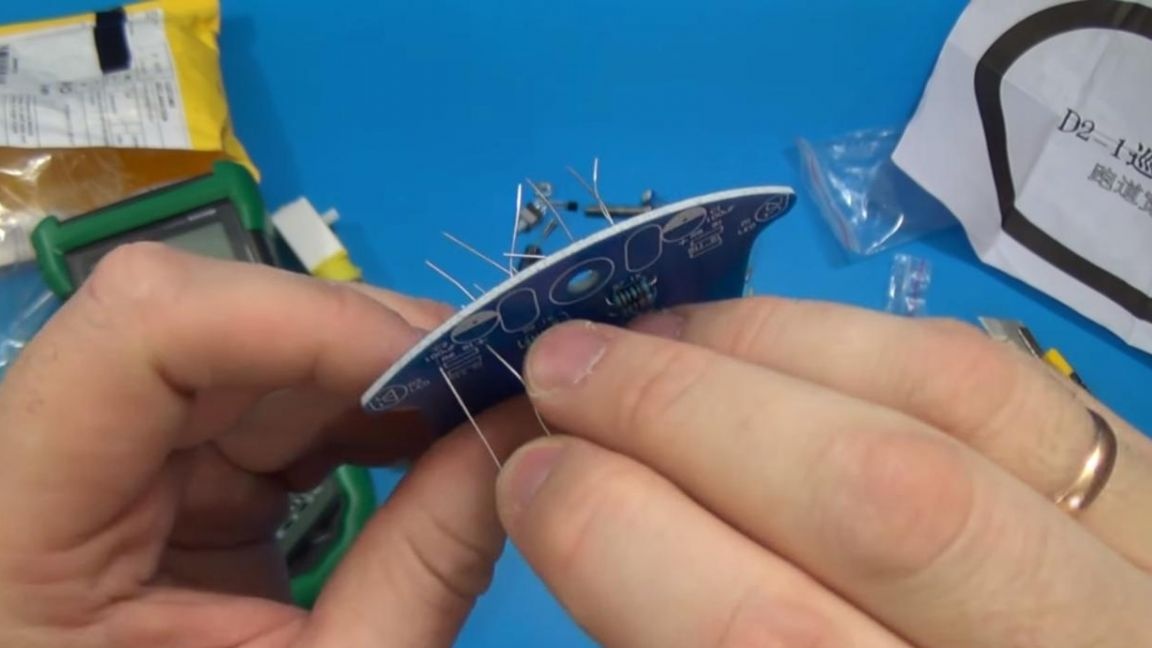
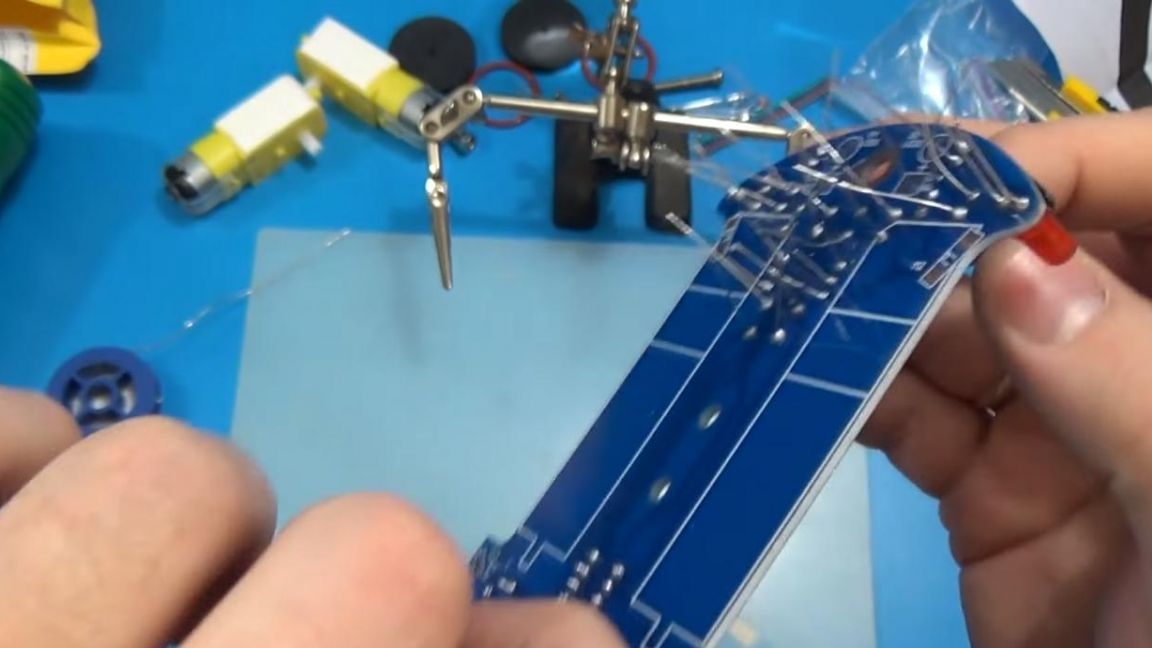
Tahtaya yerleştirilen bileşenleri lehimleme, üçüncü el lehim cihazına sabitleme, akı ve lehim uygulama, lehim hafifçe besleme zamanı.
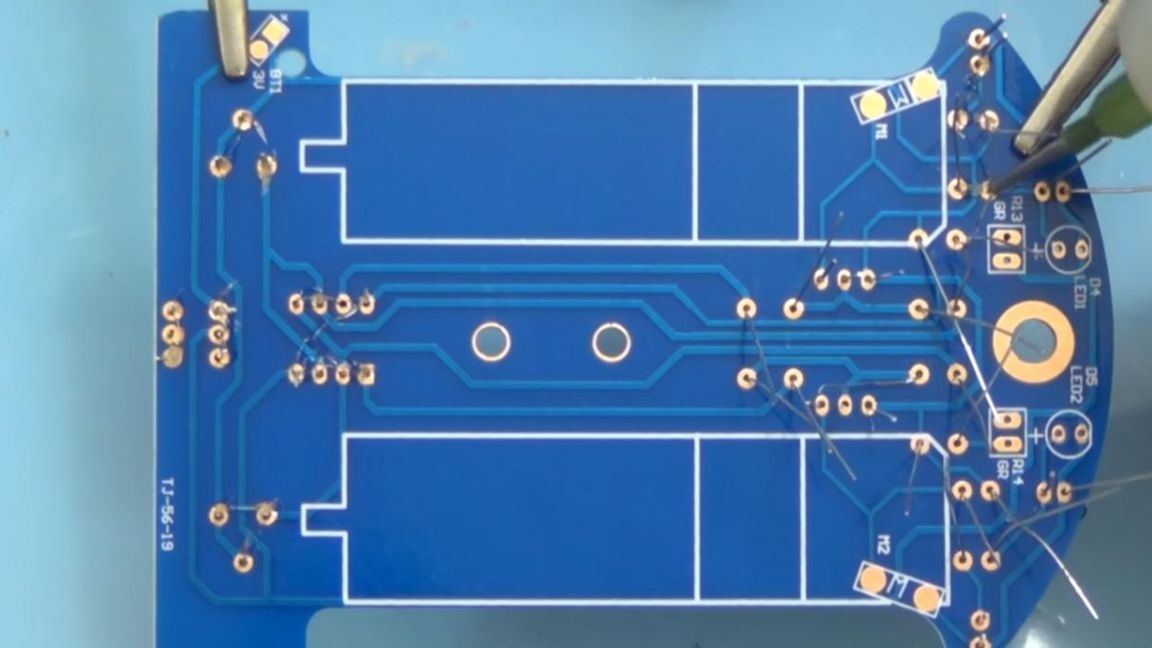
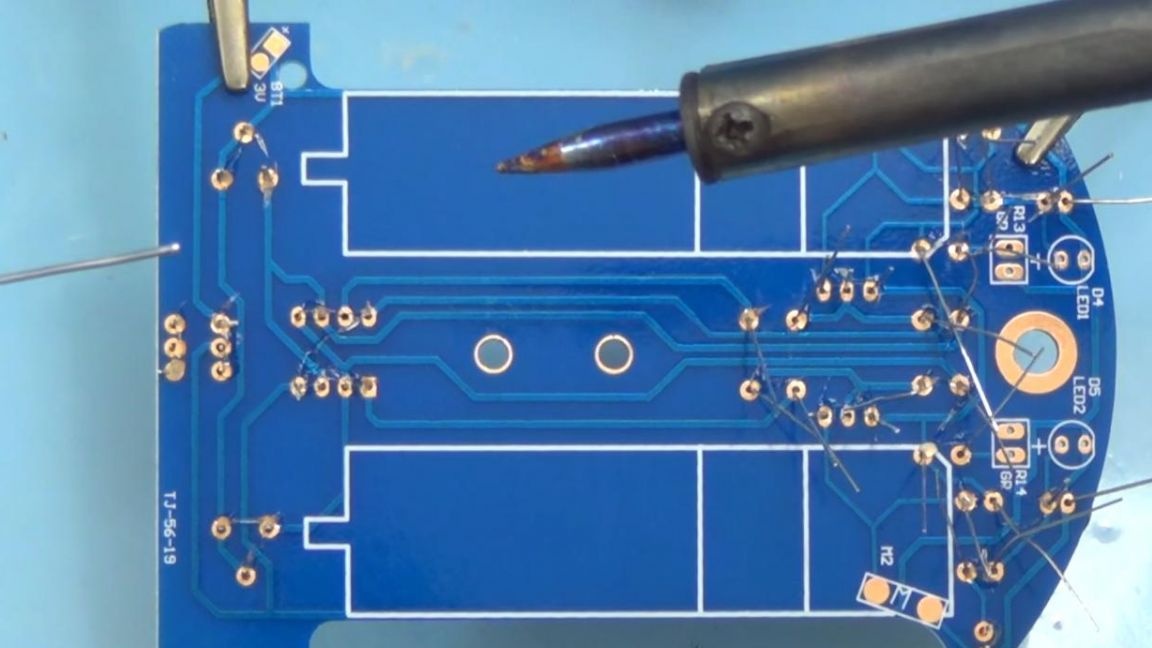
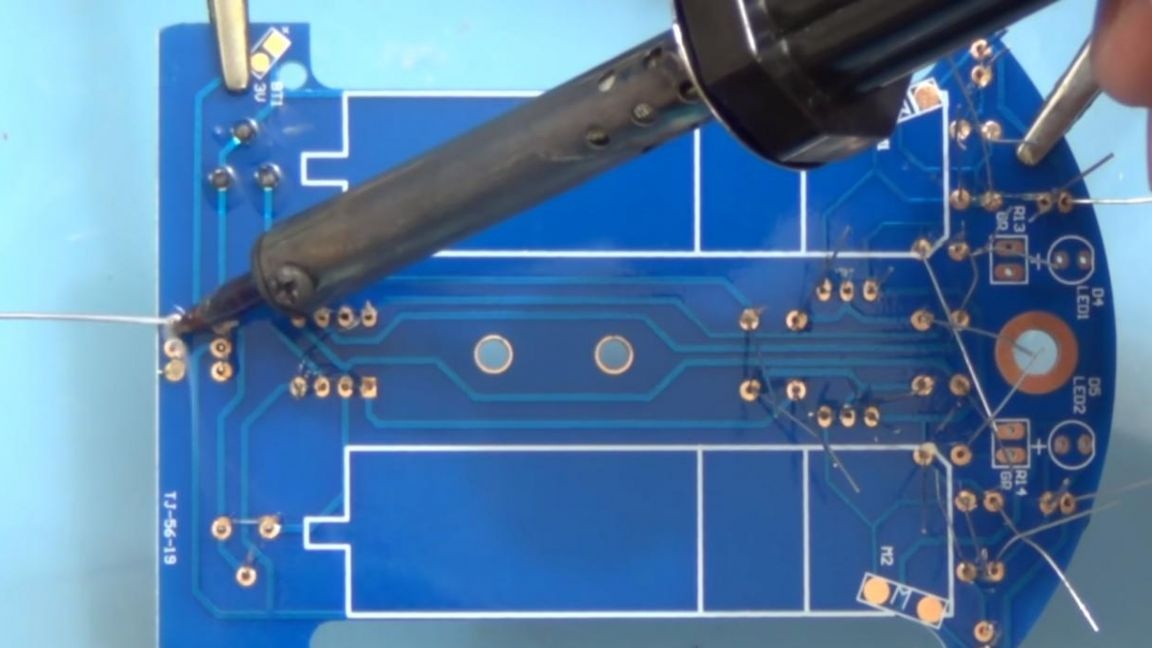
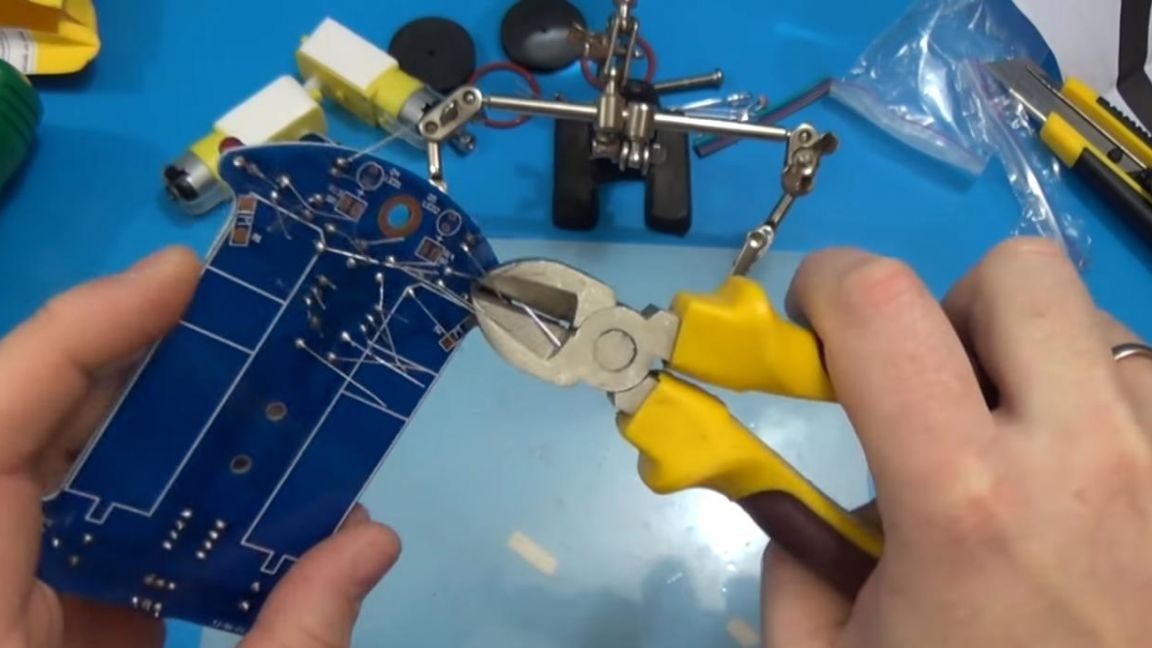
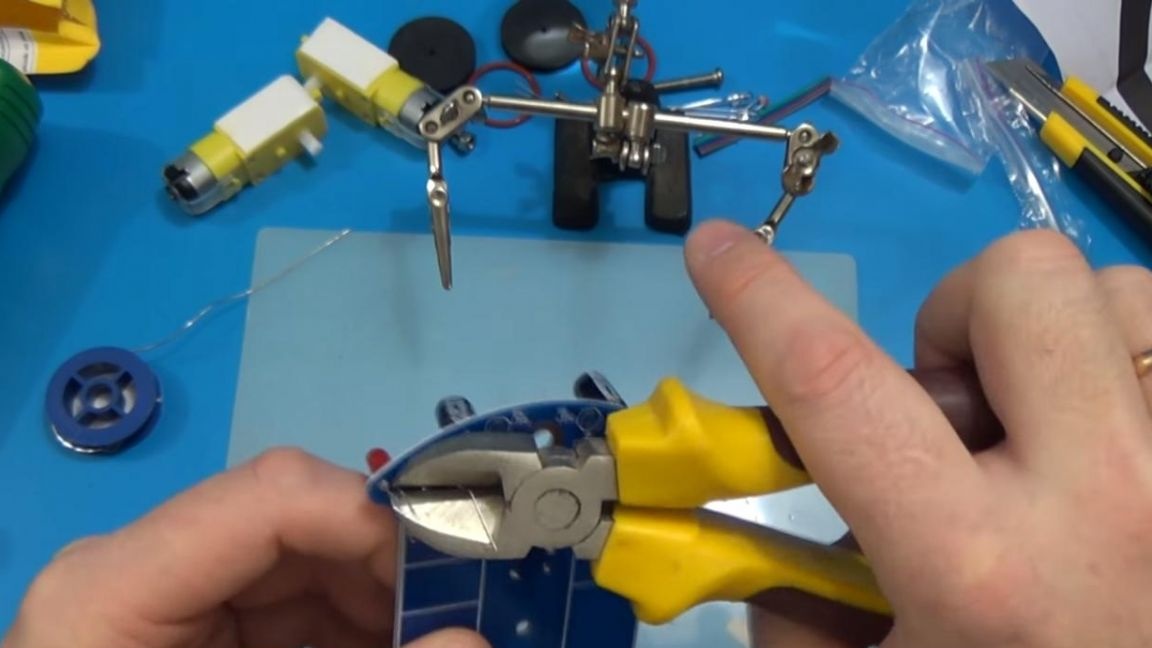
Lehimlemeden sonra, yan kesiciler yardımıyla sonuçların kalıntılarını kaldırırız, ancak buna dikkat edin, çünkü kontak pedlerini ve parçaların kendilerini yırtmak bu aşamada en kolay olanıdır.
Beşinci Adım
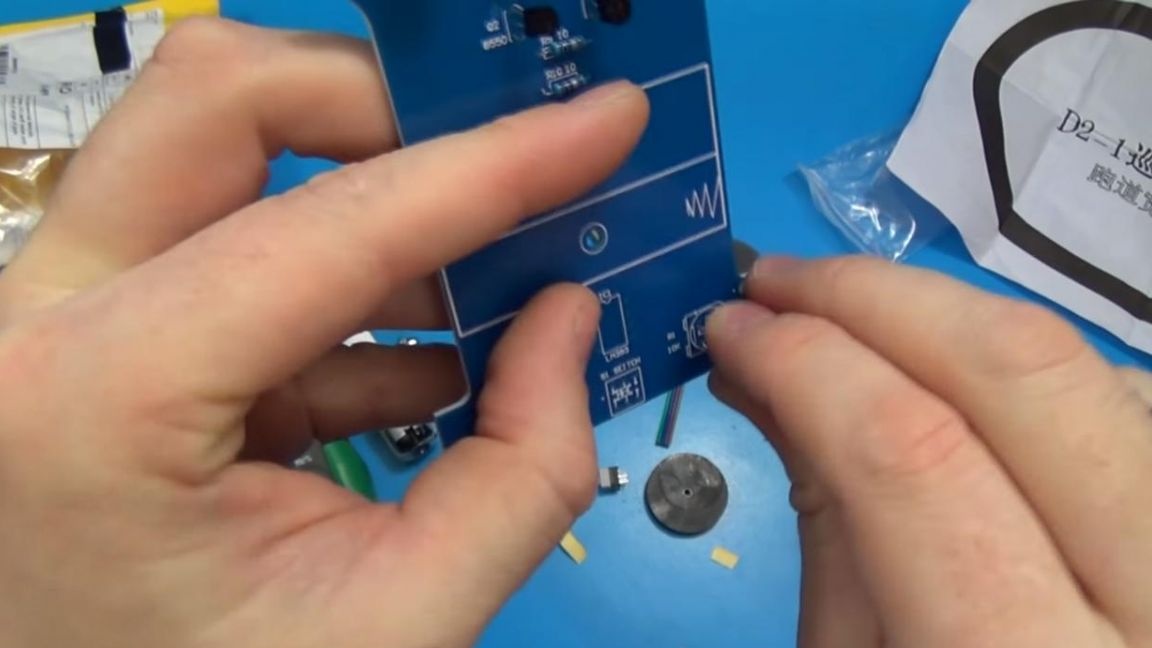
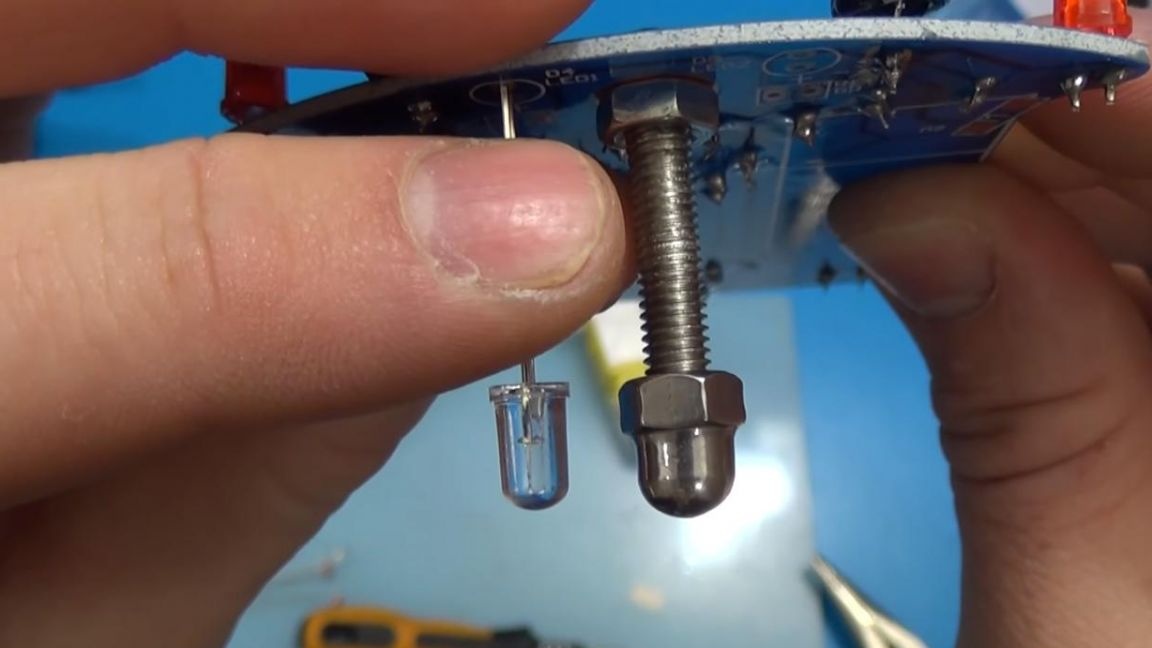
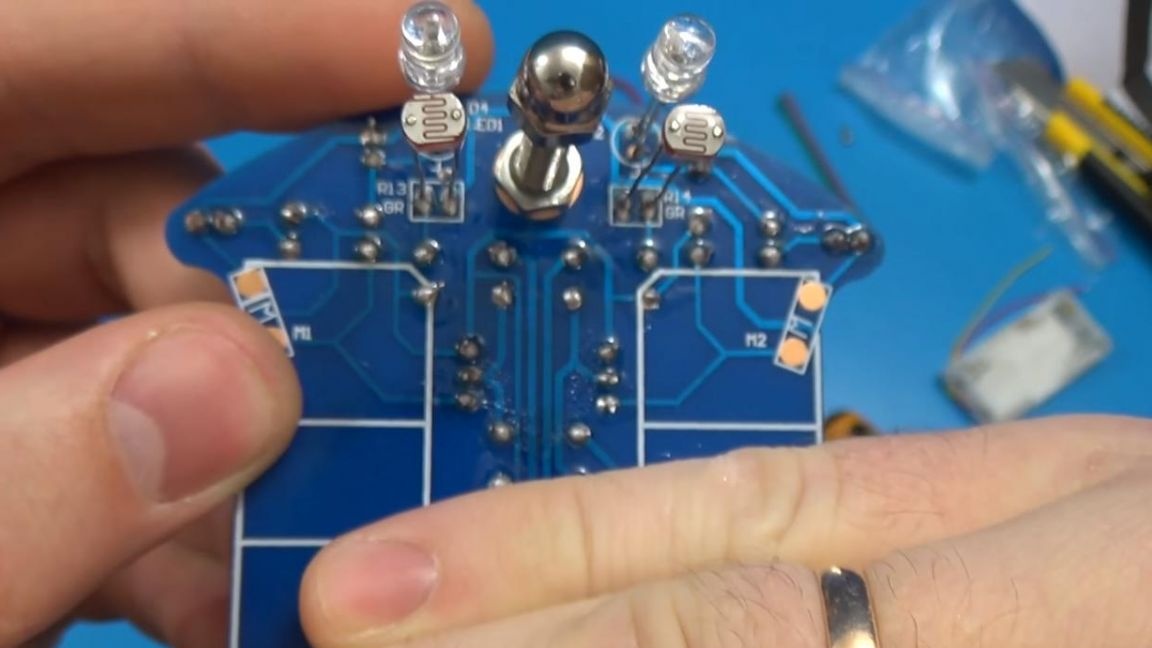
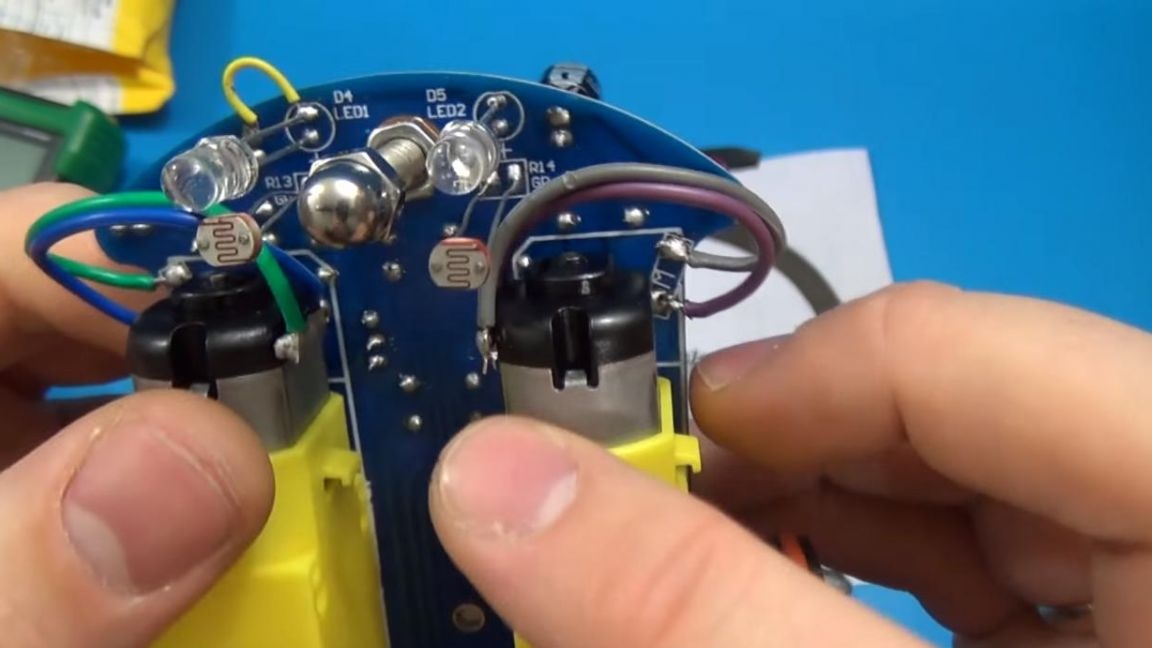
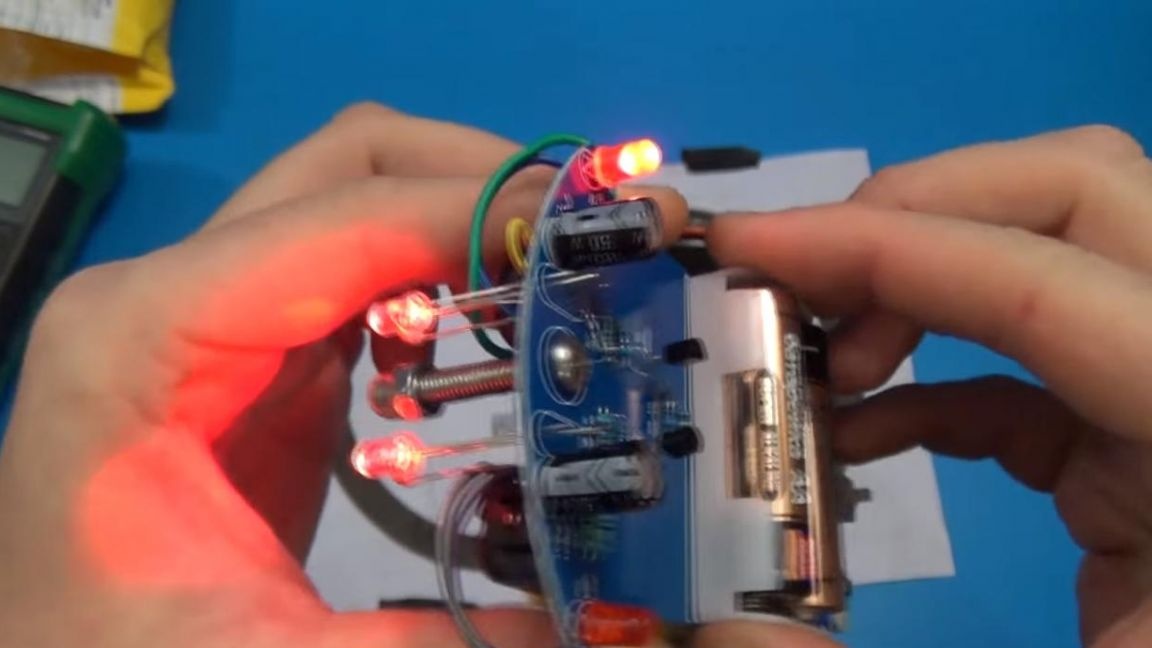
Şimdi vidayı panoya tutturuyoruz ve yanına beyaz LED'ler takıyoruz, mesafeleri vida uzantısından 1-2 mm daha az olmalı, bu fotoğrafta açıkça görülebilir, eğer bu gözlenmezse, foto dirençler daha kötü çalışır veya hiç çalışmaz .

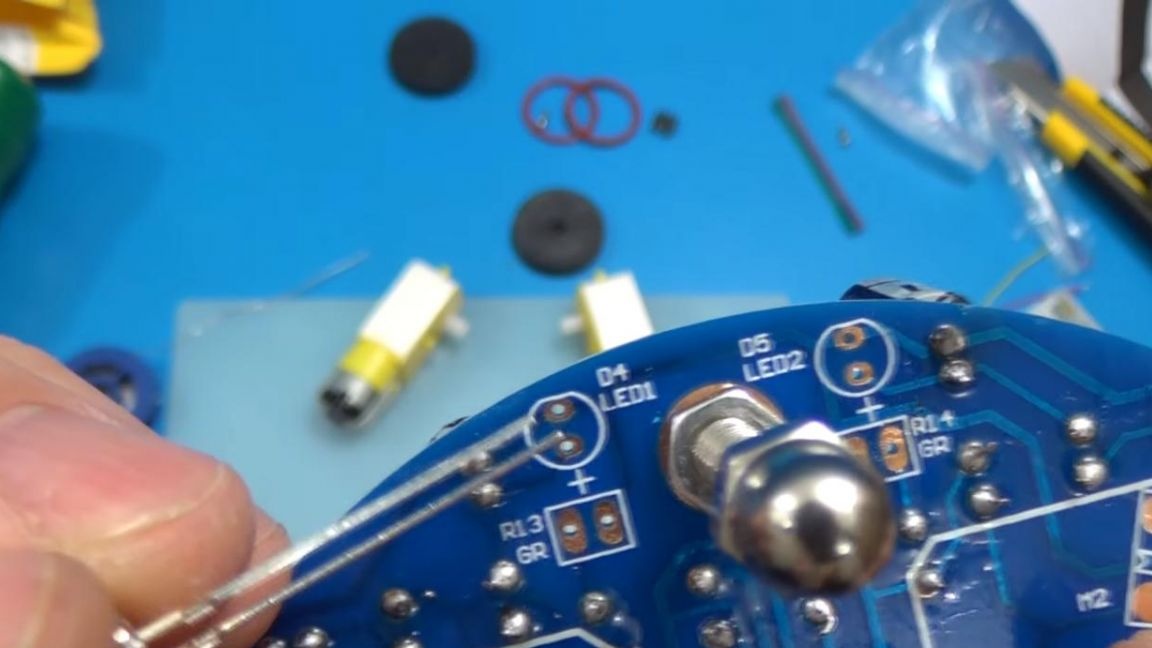
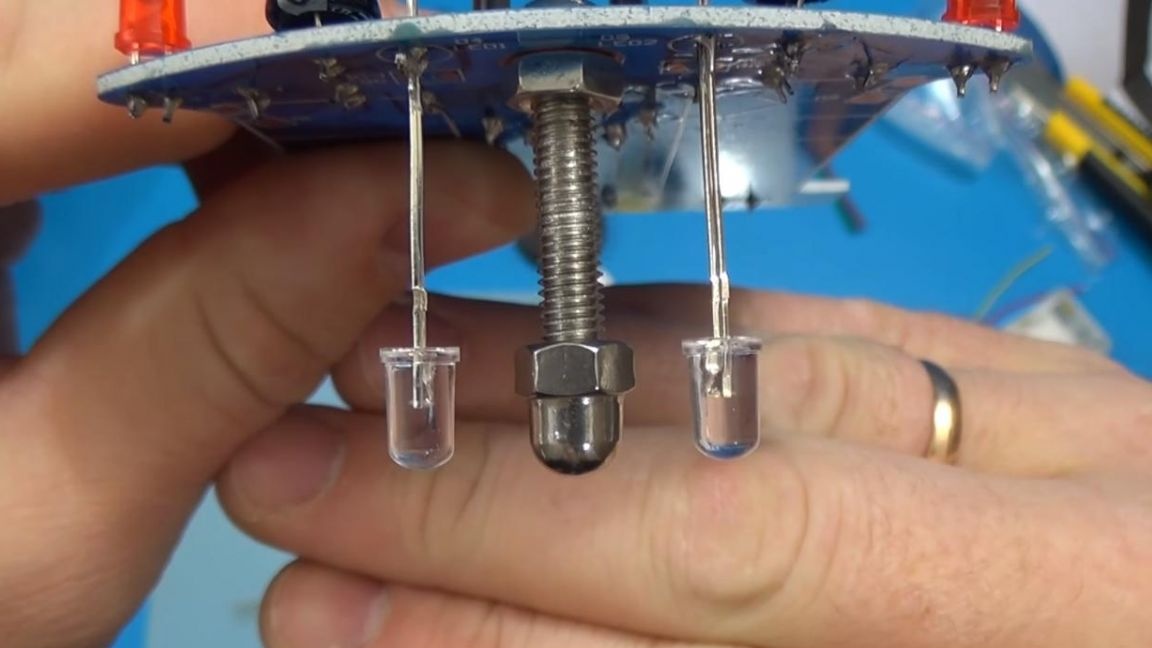
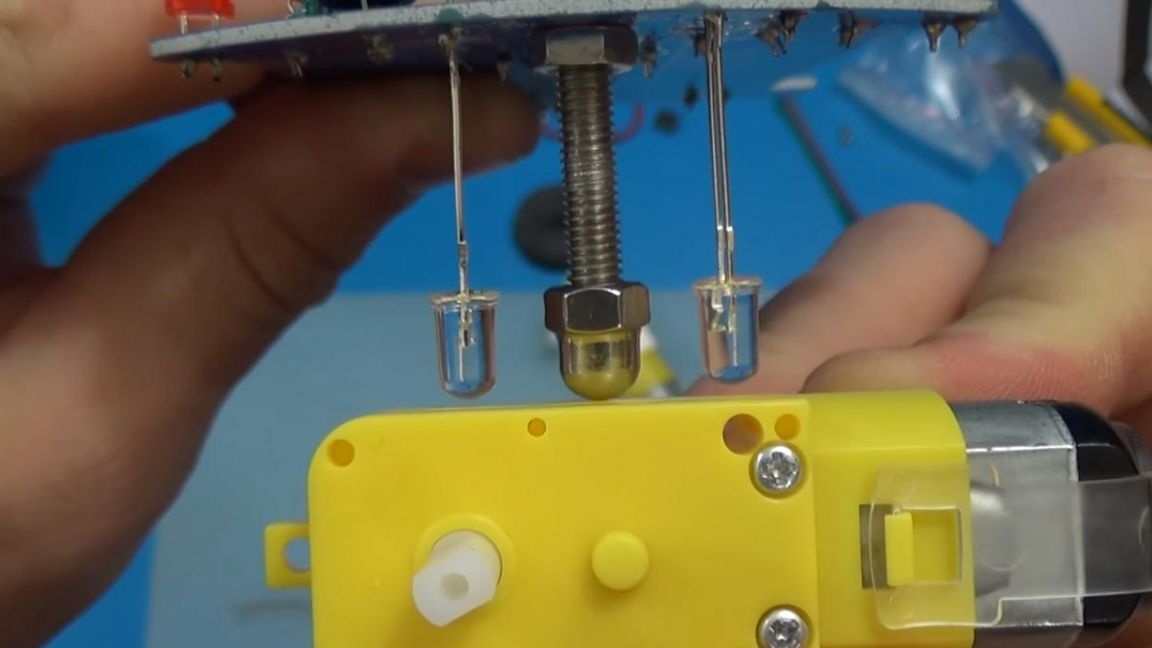
Kartın yanında, fotodirençleri LED'lerle aynı mesafede lehimliyoruz.

Altıncı Adım
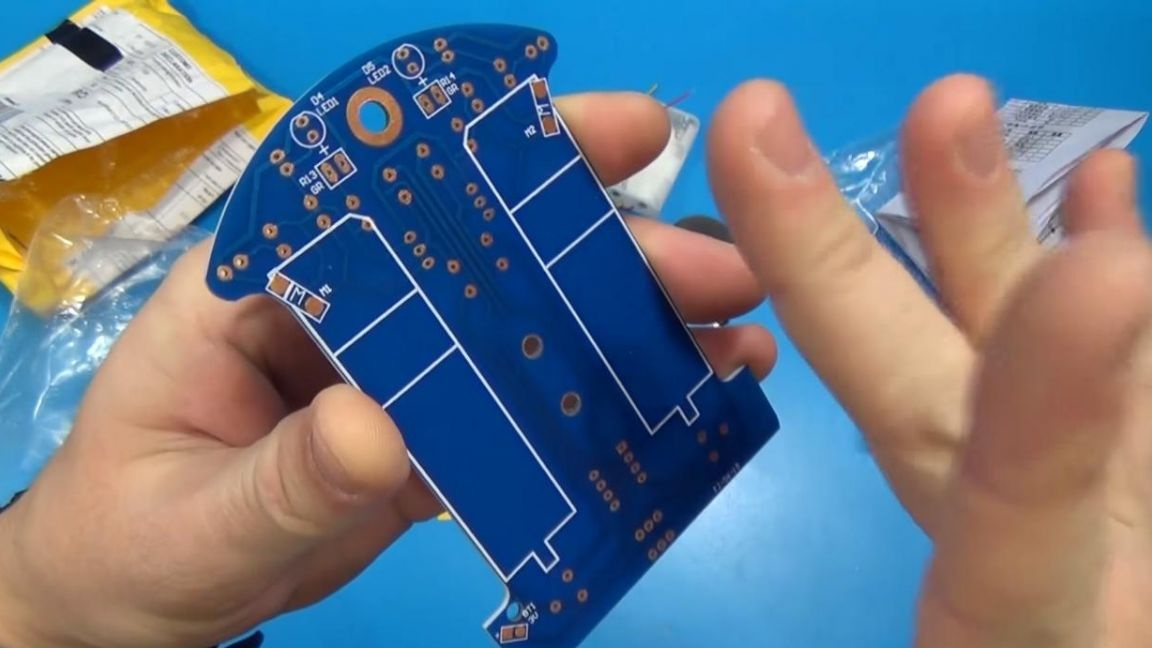
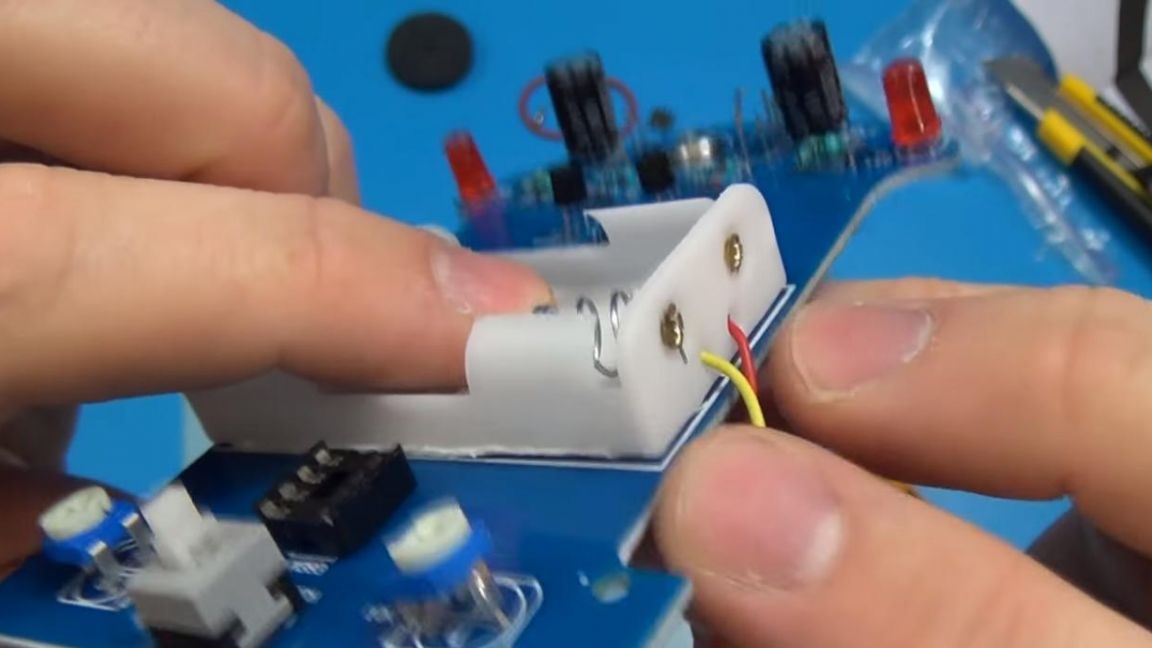
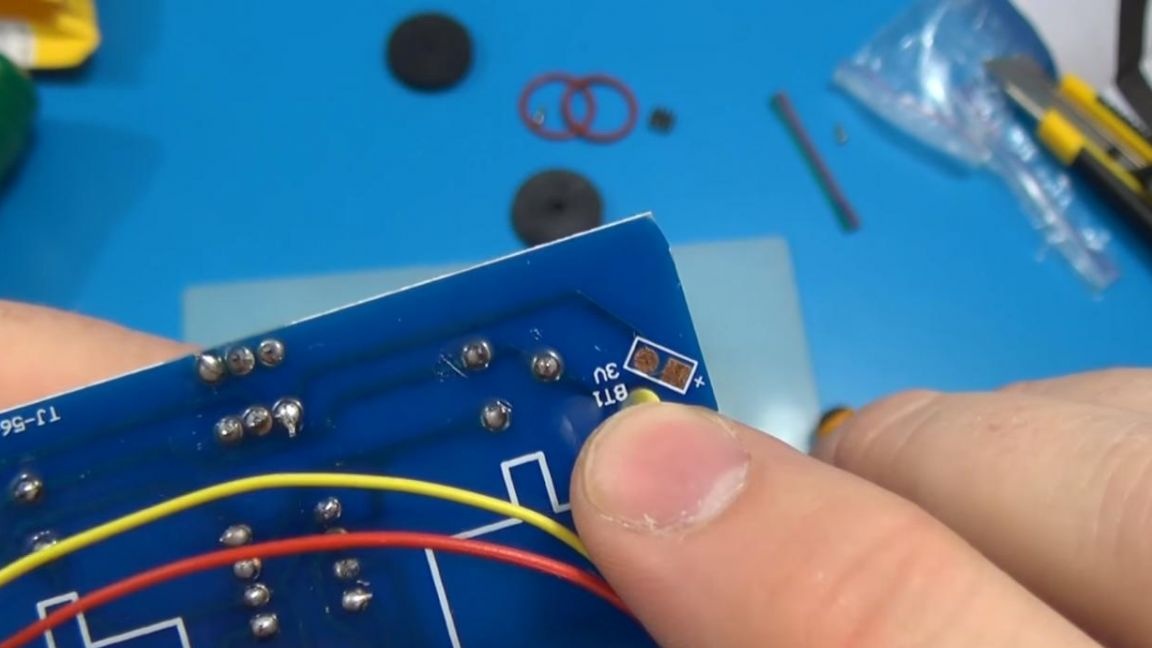
Daha sonra motorlu dişliler alıyoruz, kontakları kalaylanmalı ve onlara iki tel lehimlenmeli, ayrıca AAA pilleri takmak için kasayı tutkallıyoruz ve sarı kabloyu eksi ve kırmızı kabloyu artıya lehimliyoruz, çünkü tahtada imzalanmış.
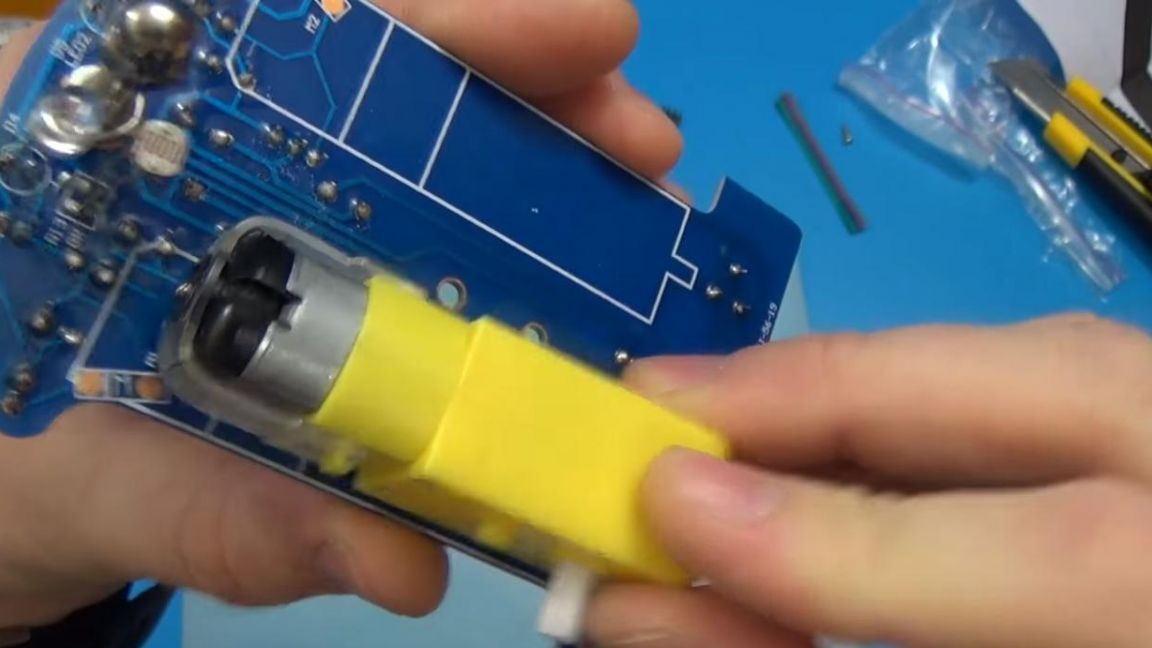

Motorları takmadan önce, tekerlekleri bir cıvata ile sabitlenmiş olanlara sabitlemeniz gerekir ve daha iyi kavrama için tekerleğin üzerine lastik bir ped konur.
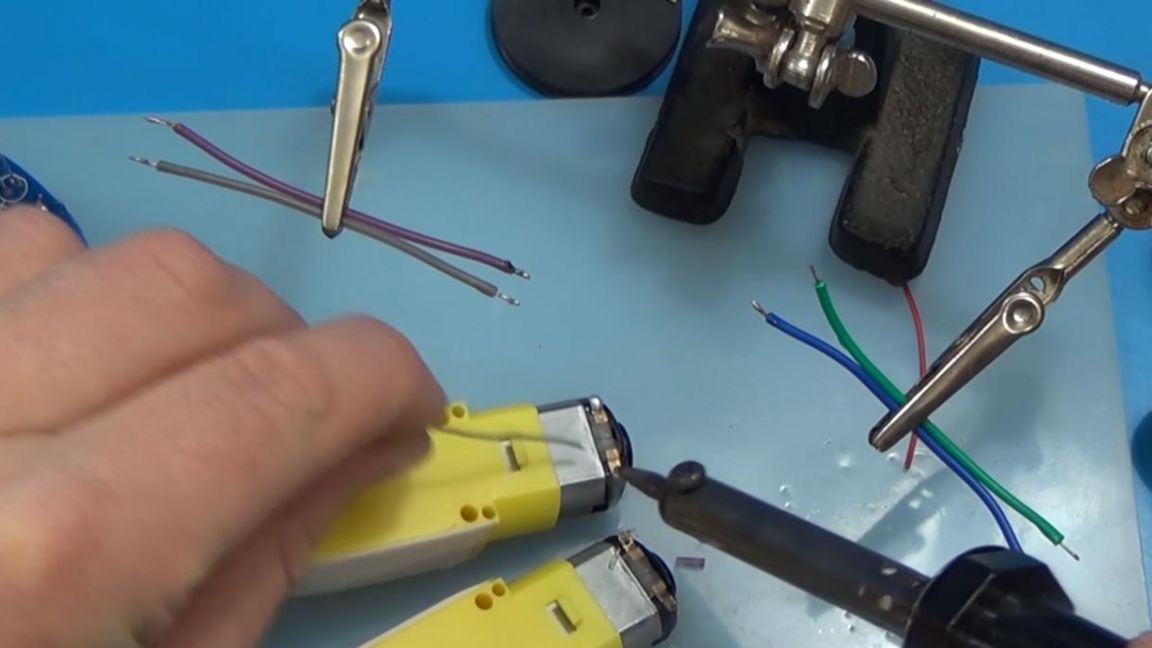

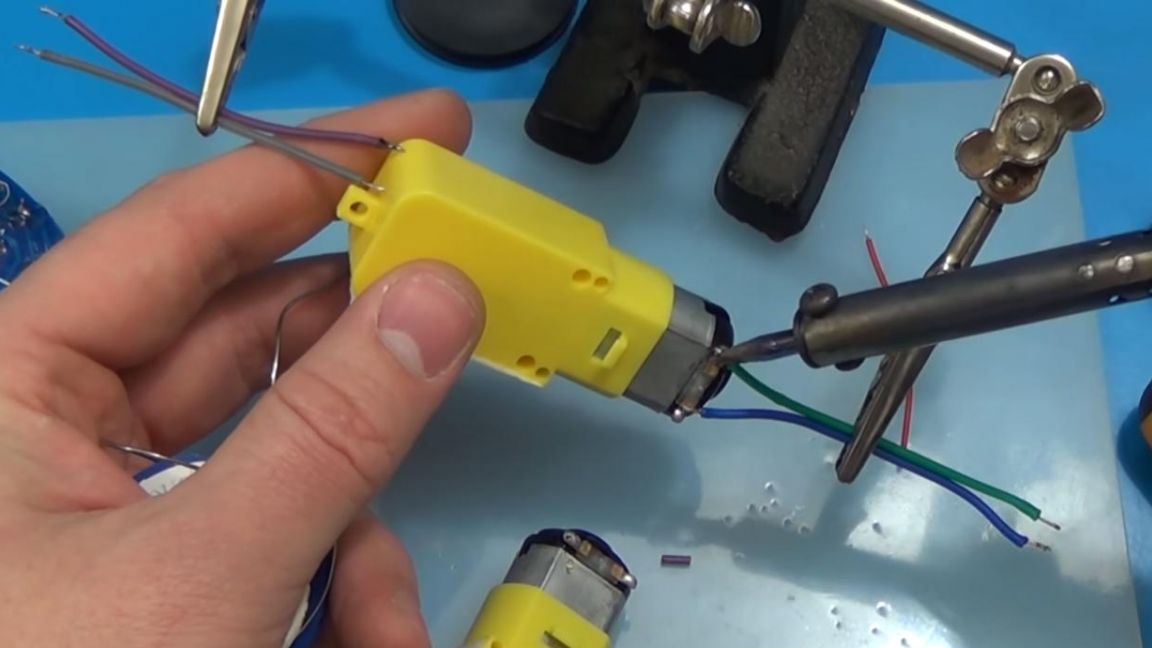
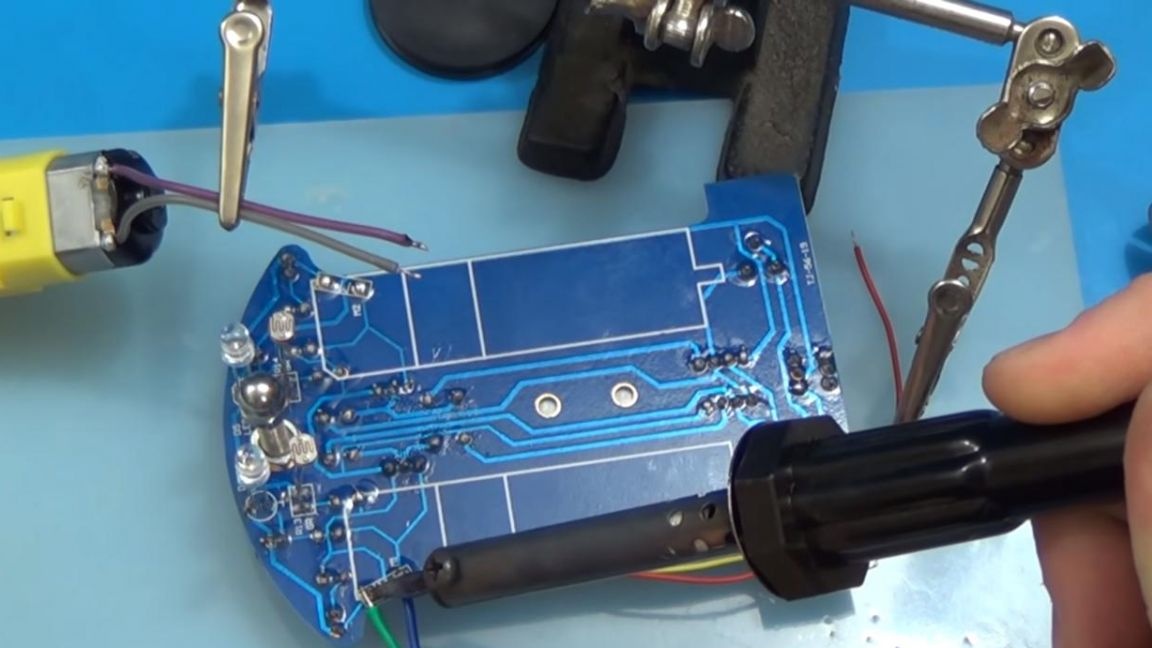
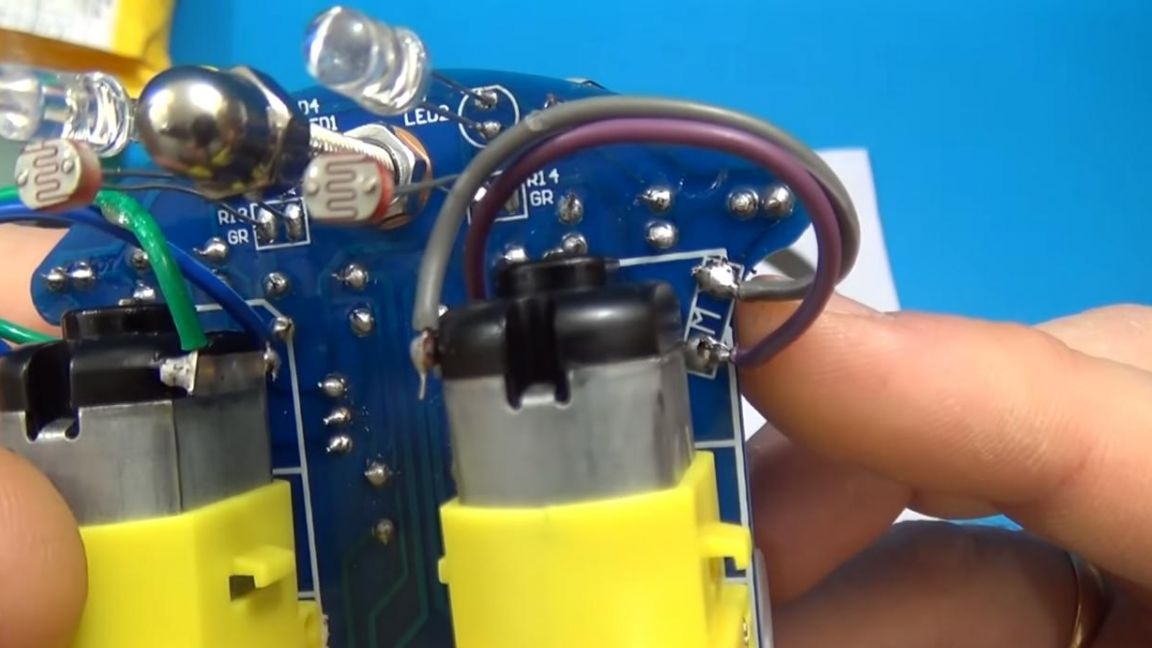
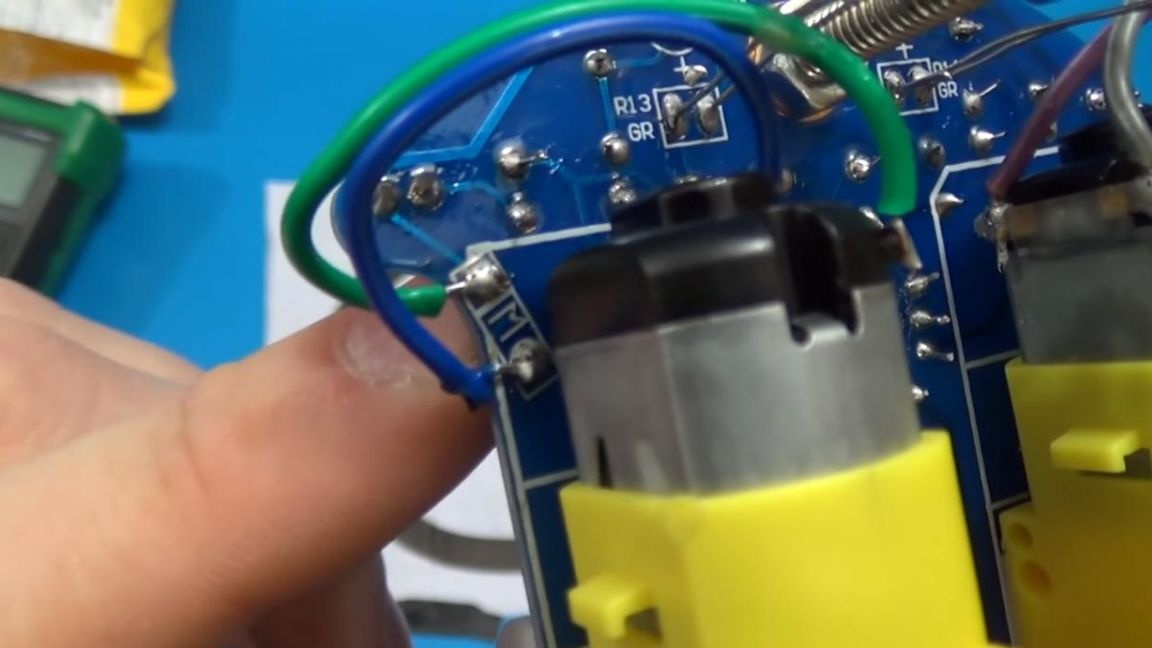
Telleri motorlardan panoya lehimliyoruz, maalesef artı nerede ve eksi burada belirtilmedi, ancak deneme yanılma yoluyla, motorun üst kontağının sırasıyla bir tel ve bir havya kullanarak tahtaya bağlanması gerektiği tespit edildi. .
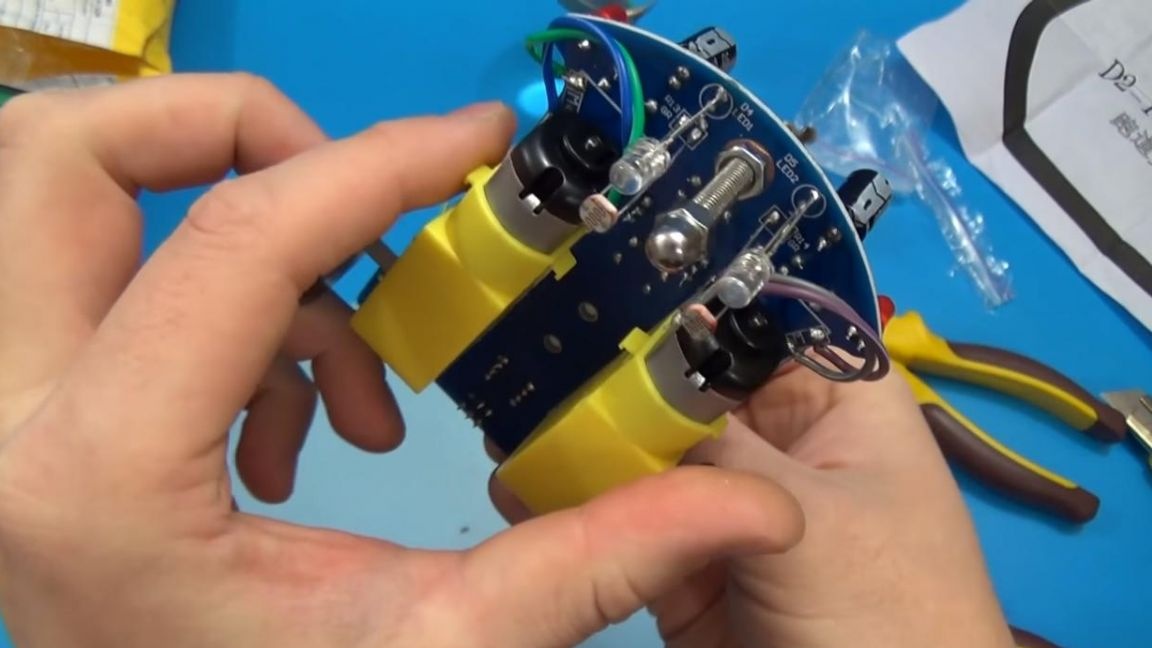
Montajın sonunda, mikro devreyi tahtaya doğru yerine takmak, anahtarı tahta ile birleştirmek ve pilleri yerleştirmek, kutupları gözlemlemek kalır.

Yedinci adım.
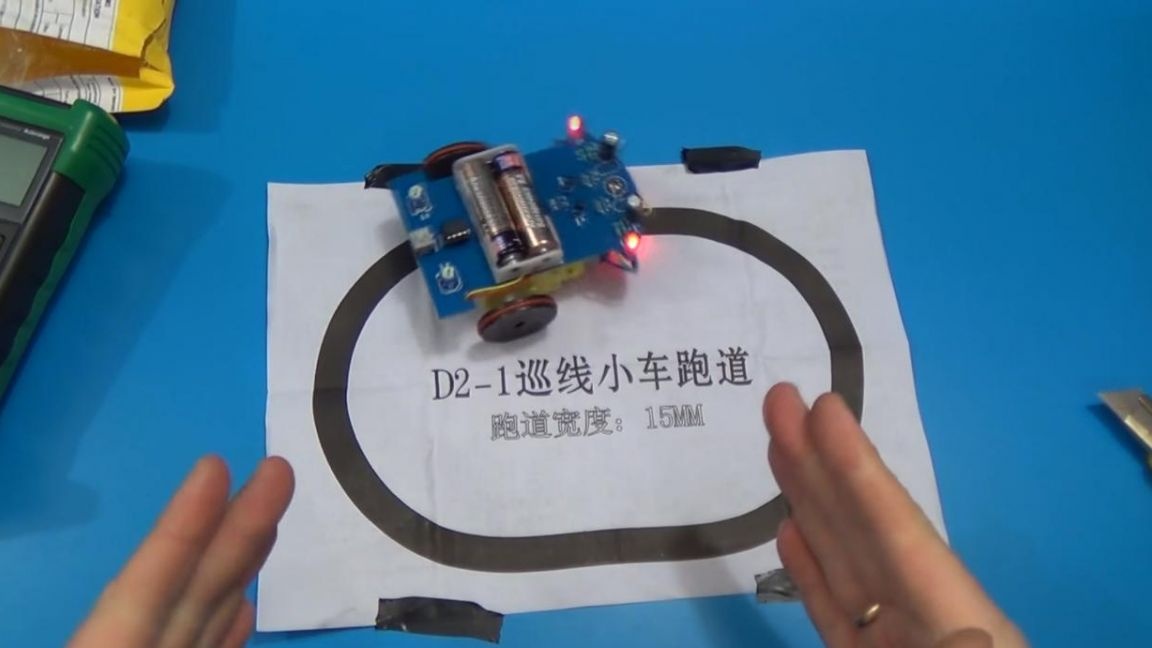
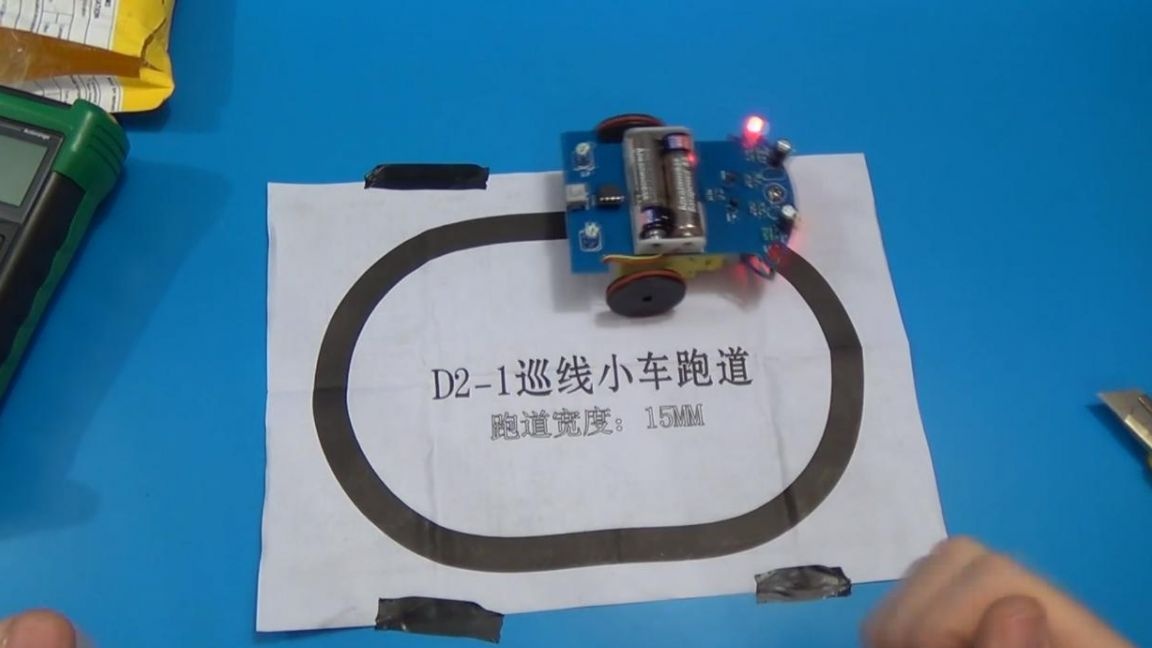
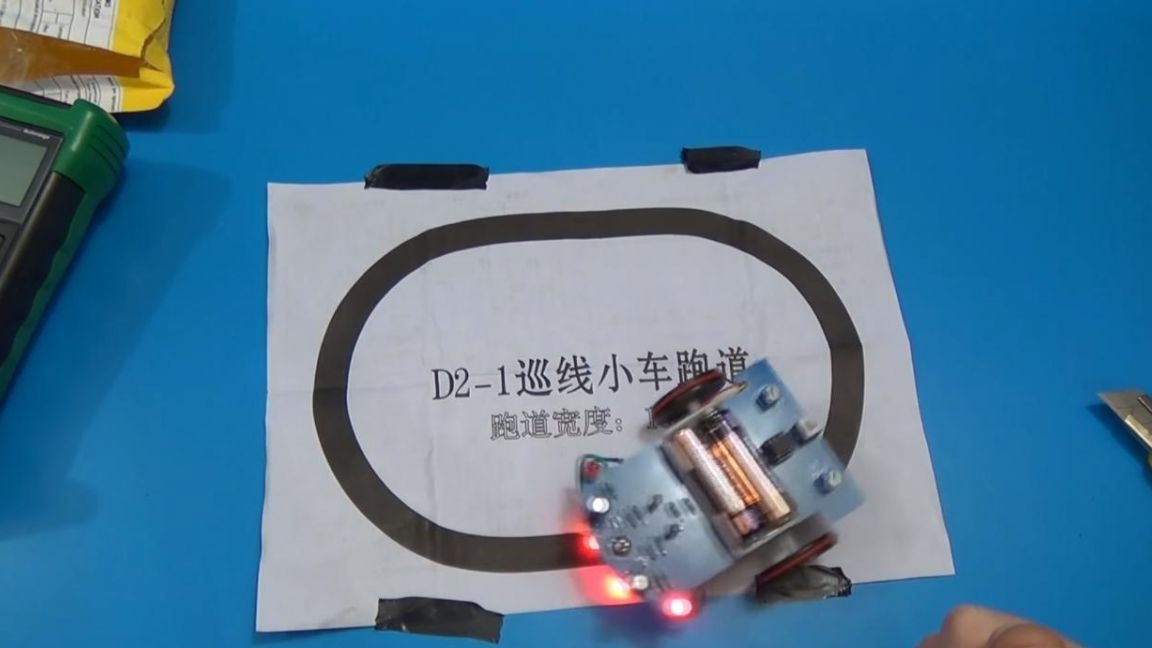
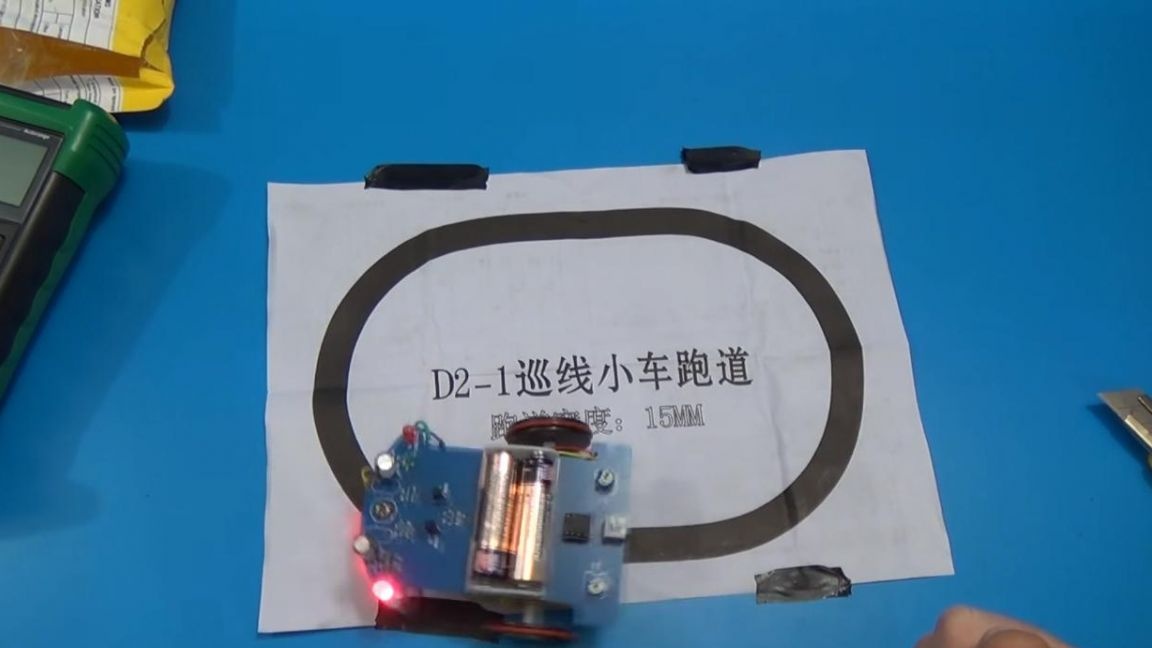
Bu robotu test etme zamanı geldi, kitin arkasında, en uygun değer olan 15 mm genişliğinde bir çizgi ile bir oval çizilen talimatlar vardı.
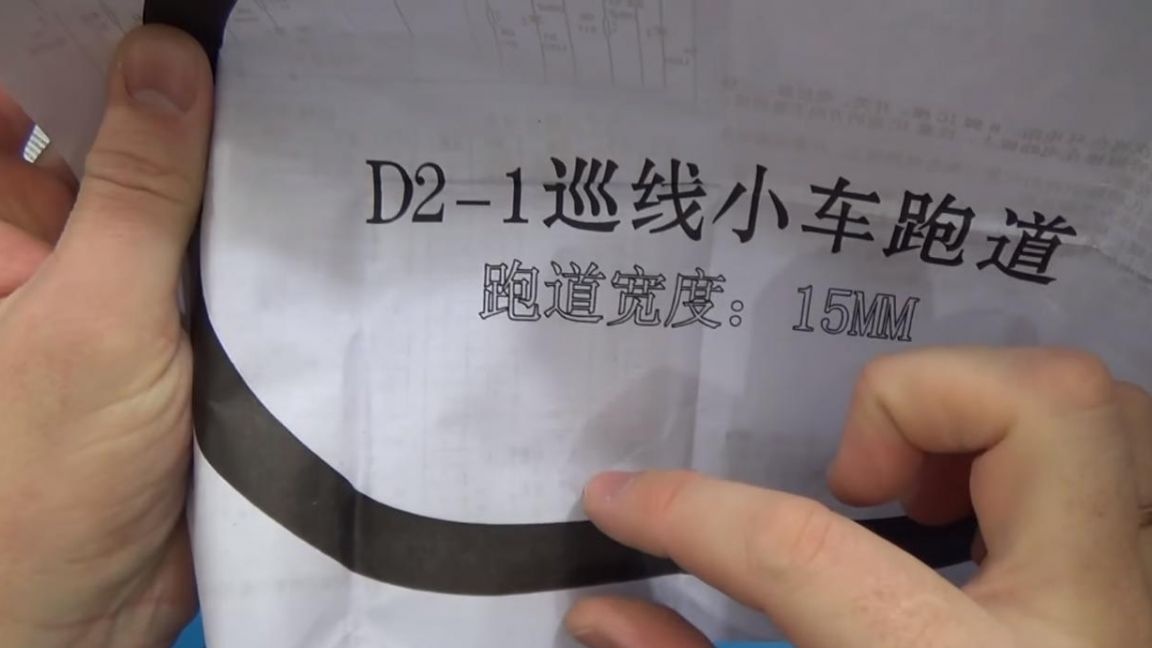
Güç düğmesine basın ve robot Düzgün çalışması için çizgiler keskin olmamalı, yani keskin dönüşler yapamayacak. Örneğin, düz bir kaplamaya 15 mm genişliğinde bir bant uygulayarak düzgün dönüşlerle bir parça yapabilirsiniz.
Hepsi benim için, ilginiz ve yaratıcı başarınız için hepinize teşekkür ederim.